蓝桥杯嵌入式第七届真题(完成) STM32G431
蓝桥杯嵌入式第七届真题(完成) STM32G431
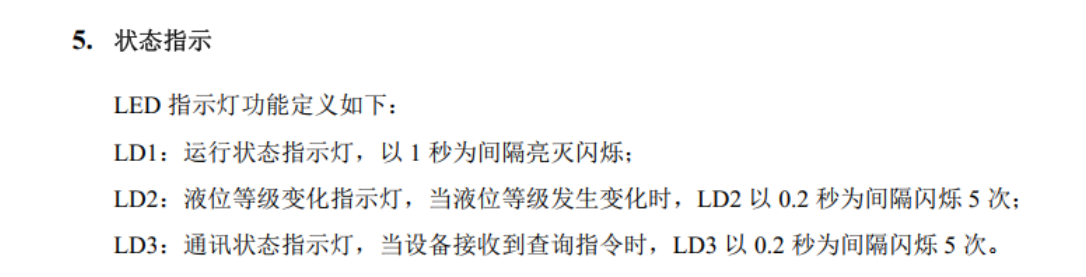
题目

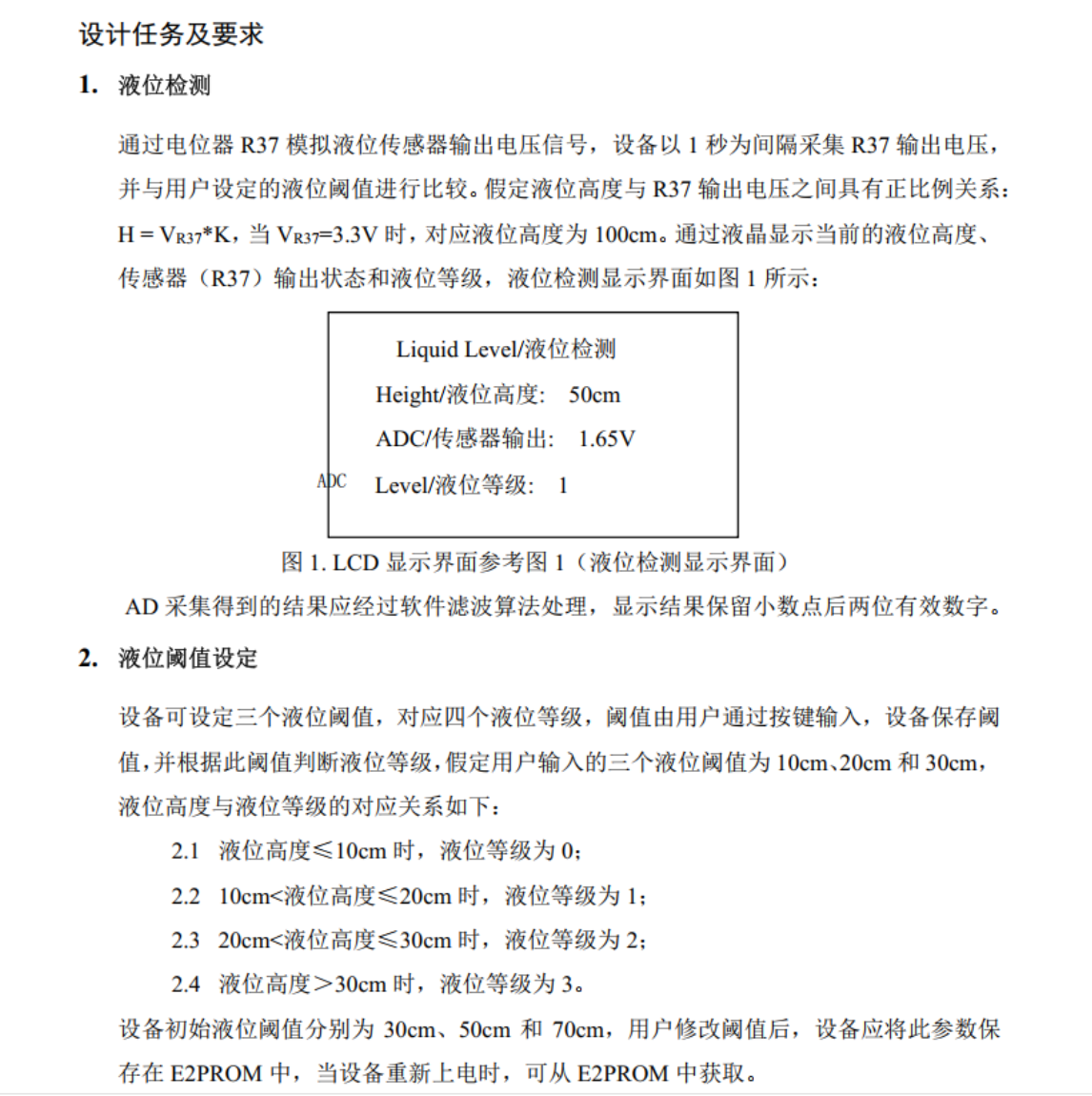
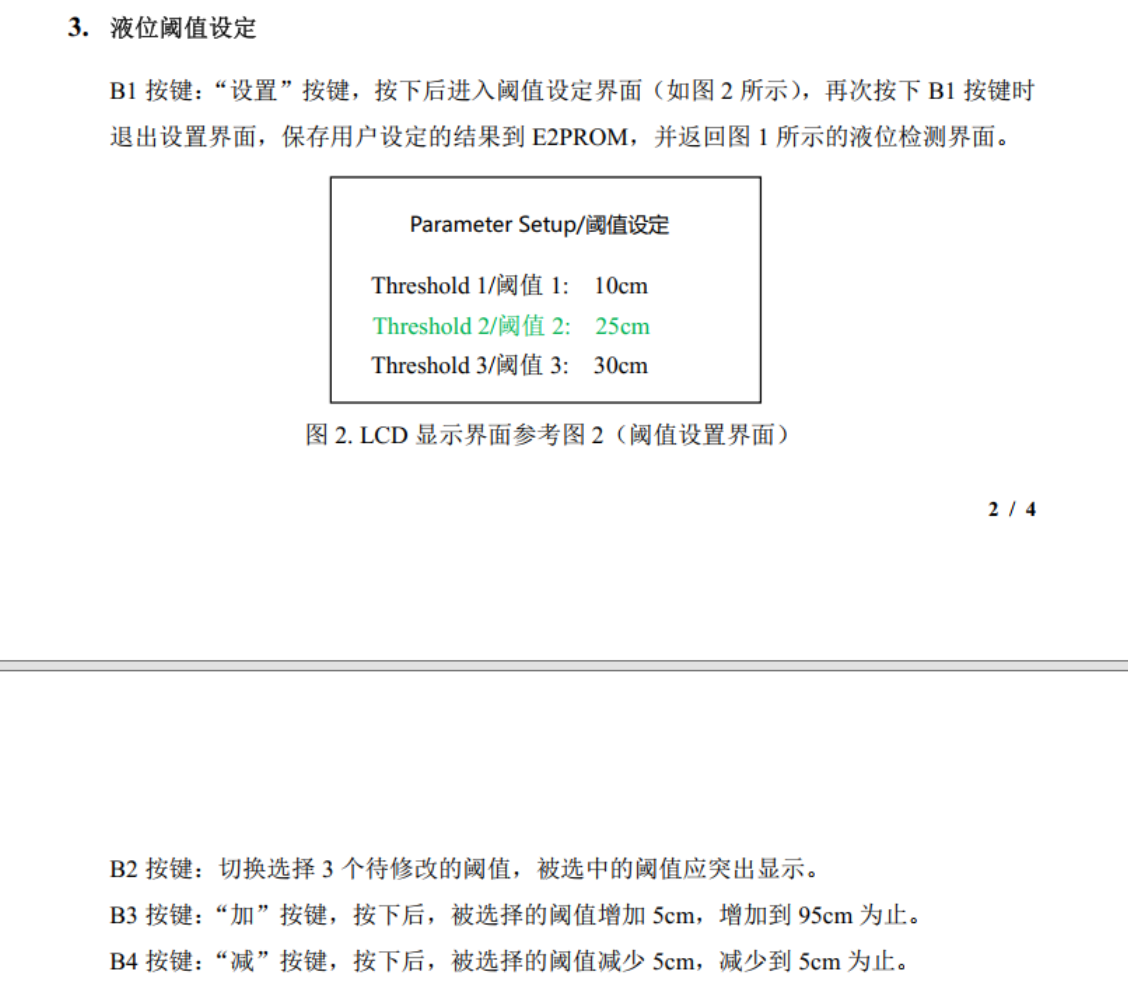
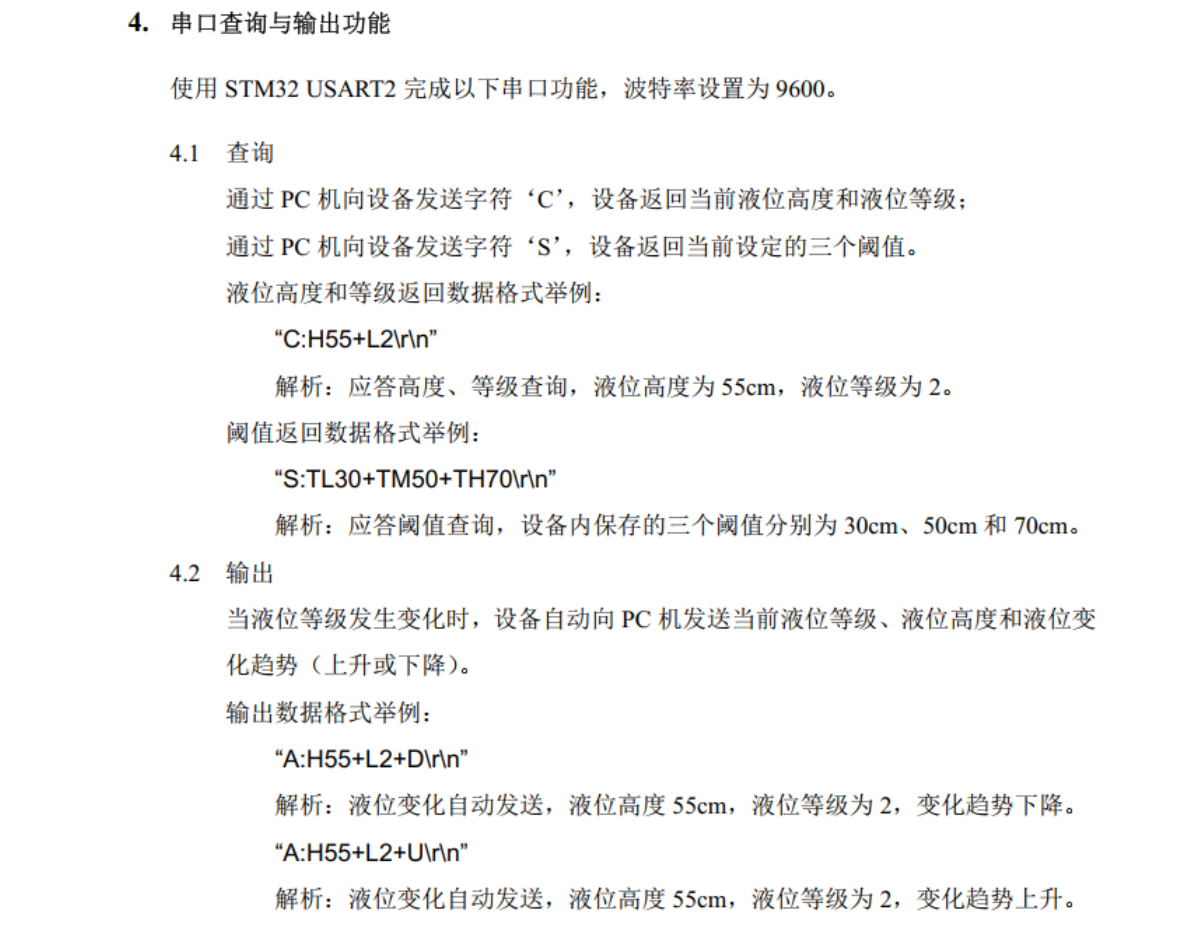
相关文件
main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* opensource.org/licenses/BSD-3-Clause********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "adc.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "myadc.h"
#include "key.h"
#include "i2c_hal.h"
#include "stdio.h"
#include "led.h"
#include "usart2.h"
#include "string.h"
#include "stdio.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
extern uint32_t adctimes;
extern float k;//K?
extern float adcval;
extern uint32_t height;
extern uint8_t level;
extern unsigned char min,med,max;
uint8_t view = 0;
uint8_t lcdtext[30];
extern struct Key key[4];
extern uint32_t led1times,led2times,led3times;
extern uint8_t led2flag,led3flag;
extern uint8_t led1status,led2status,led3status;
extern uint8_t OneData;
extern uint8_t rxflag;
uint8_t txtext[20];
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
void lcd_process(void);
void led_process(void);
void adc_process(void);
void key_process(void);
void rx_process(void);
/* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_ADC2_Init();MX_TIM2_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */HAL_TIM_Base_Start_IT(&htim2);HAL_UART_Receive_IT(&huart1,&OneData,1);LCD_Init();I2CInit(); /* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);E2PROM_Write(0x00,min);HAL_Delay(5);E2PROM_Write(0x01,med);HAL_Delay(5);E2PROM_Write(0x02,max); HAL_Delay(5);LED_display(0x00);while (1){adc_process();key_process();lcd_process();led_process();rx_process();/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};/** Configure the main internal regulator output voltage*/HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;RCC_OscInitStruct.PLL.PLLN = 20;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}/** Initializes the peripherals clocks*/PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART1|RCC_PERIPHCLK_ADC12;PeriphClkInit.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK2;PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 */
void adc_process(void)
{float newadcval;uint8_t newlevel;uint32_t newheight;int change;min = E2PROM_Read(0x00);med = E2PROM_Read(0x01);max = E2PROM_Read(0x02);if(adctimes >= 1000){adctimes = 0;newadcval = get_Adc(&hadc2);newheight = k * newadcval;if(newheight <= min){newlevel = 0;}else if(newheight <= med){newlevel = 1;}else if(newheight <= max){newlevel = 2;}else{newlevel = 3;}if(level != newlevel){led2flag = 1; // 激活液位变化指示change = newheight - height;height = newheight;adcval = newadcval; // 更新adcvallevel = newlevel;if(change > 0){sprintf((char *)txtext, "A:H%d+L%d+U\r\n", height, level);HAL_UART_Transmit(&huart1, (uint8_t *)txtext, strlen((char *)txtext), 50);}else if(change < 0){sprintf((char *)txtext, "A:H%d+L%d+D\r\n", height, level);HAL_UART_Transmit(&huart1, (uint8_t *)txtext, strlen((char *)txtext), 50);}}}
}void lcd_process(void)
{switch(view){case 0:{sprintf((char *)lcdtext," Liquid Level");LCD_DisplayStringLine(Line0,lcdtext);sprintf((char *)lcdtext," Height:%d",height);LCD_DisplayStringLine(Line2,lcdtext);sprintf((char *)lcdtext," ADC:%.2f",adcval);LCD_DisplayStringLine(Line4,lcdtext);sprintf((char *)lcdtext," Level:%d",level);LCD_DisplayStringLine(Line6,lcdtext);}break;case 1:{sprintf((char *)lcdtext," Parameter Setup");LCD_DisplayStringLine(Line0,lcdtext);sprintf((char *)lcdtext," Threshold 1:%d",min);LCD_DisplayStringLine(Line2,lcdtext);sprintf((char *)lcdtext," Threshold 2:%d",med);LCD_DisplayStringLine(Line4,lcdtext);sprintf((char *)lcdtext," Threshold 3:%d",max);LCD_DisplayStringLine(Line6,lcdtext);}break;case 2:{sprintf((char *)lcdtext," Parameter Setup");LCD_DisplayStringLine(Line0,lcdtext);sprintf((char *)lcdtext," Threshold 1:%d",min);LCD_SetTextColor(Green);LCD_DisplayStringLine(Line2,lcdtext);LCD_SetTextColor(White);sprintf((char *)lcdtext," Threshold 2:%d",med);LCD_DisplayStringLine(Line4,lcdtext);sprintf((char *)lcdtext," Threshold 3:%d",max);LCD_DisplayStringLine(Line6,lcdtext);}break;case 3:{sprintf((char *)lcdtext," Parameter Setup");LCD_DisplayStringLine(Line0,lcdtext);sprintf((char *)lcdtext," Threshold 1:%d",min);LCD_DisplayStringLine(Line2,lcdtext);sprintf((char *)lcdtext," Threshold 2:%d",med);LCD_SetTextColor(Green);LCD_DisplayStringLine(Line4,lcdtext);LCD_SetTextColor(White);sprintf((char *)lcdtext," Threshold 3:%d",max);LCD_DisplayStringLine(Line6,lcdtext);}break;case 4:{sprintf((char *)lcdtext," Parameter Setup");LCD_DisplayStringLine(Line0,lcdtext);sprintf((char *)lcdtext," Threshold 1:%d",min);LCD_DisplayStringLine(Line2,lcdtext);sprintf((char *)lcdtext," Threshold 2:%d",med);LCD_DisplayStringLine(Line4,lcdtext);sprintf((char *)lcdtext," Threshold 3:%d",max);LCD_SetTextColor(Green);LCD_DisplayStringLine(Line6,lcdtext);LCD_SetTextColor(White);}break;}
}void key_process(void)
{if(key[0].key_flag==1&&(view==0)){key[0].key_flag=0;view=1;LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);}if(key[0].key_flag==1&&(view==1||view==2||view==3||view==4)){key[0].key_flag=0;view=0;LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);}if(key[1].key_flag==1&&(view==1||view==2||view==3||view==4)){LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);key[1].key_flag=0;view++;if(view>4)view=2;}if(key[2].key_flag==1&&view==2){LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);key[2].key_flag=0;min+=5;if(min>95)min=5;E2PROM_Write(0x00,min);}else if(key[2].key_flag==1&&view==3){LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);key[2].key_flag=0;med+=5;if(med>95)med=5;E2PROM_Write(0x01,med);}else if(key[2].key_flag==1&&view==4){LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);key[2].key_flag=0;max+=5;if(max>95)max=5;E2PROM_Write(0x02,max);}if(key[3].key_flag==1&&view==2){LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);key[3].key_flag=0;min-=5;if(min<5)min=5;E2PROM_Write(0x00,min);}else if(key[3].key_flag==1&&view==3){LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);key[3].key_flag=0;med-=5;if(med<5)med=5;E2PROM_Write(0x01,med);}else if(key[3].key_flag==1&&view==4){LCD_Clear(Black);LCD_SetBackColor(Black);LCD_SetTextColor(White);key[3].key_flag=0;max-=5;if(max<5)max=5;E2PROM_Write(0x01,max);}
}void led_process(void)
{// LD1处理if(led1times >= 1000) // 每1秒{led1times = 0;led1status = !led1status;LED_display(led1status ? 0x01 : 0x00);}// LD2处理static int led2count = 0;if(led2flag && led2times >= 200) // 每0.2秒{led2times = 0;led2status = !led2status;LED_display(led2status ? 0x02 : 0x00);if(led2status) // 只在LED从关闭状态变为开启状态时增加计数{led2count++;}if(led2count >= 5) // 闪烁5次后停止{led2flag = 0;led2count = 0;}}// LD3处理static int led3count = 0;if(led3flag && led3times >= 200) // 每0.2秒{led3times = 0;led3status = !led3status;LED_display(led3status ? 0x04 : 0x00);if(led3status) // 只在LED从关闭状态变为开启状态时增加计数{led3count++;}if(led3count >= 5) // 闪烁5次后停止{led3flag = 0;led3count = 0;}}
}void rx_process(void)
{if(rxflag==1){led3flag = 1;rxflag = 0;switch(OneData){case 'C':{sprintf((char *)txtext,"C:H%d+L%d\r\n",height,level);HAL_UART_Transmit(&huart1,(uint8_t *)txtext,strlen((char *)txtext),50);}break;case 'S':{sprintf((char *)txtext,"S:TL%d+TM%d+TH%d\r\n",min,med,max);HAL_UART_Transmit(&huart1,(uint8_t *)txtext,strlen((char *)txtext),50);}break;default:{sprintf((char *)txtext,"Error!\r\n");HAL_UART_Transmit(&huart1,(uint8_t *)txtext,strlen((char *)txtext),50);}break;}}
}
/* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state *//* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/adc_process 中1s读取一次使用1ms进入一次SysTick_Handler 中断定时
newadcval、newlevel、newheight都是最新一次数据,与上一次数据比较是否液位发生变化
led_process中题目要求三个led按要求变化,led1要一直闪烁,led2、led3满足特定条件后才变化翻转所以使用两个标志位led2flag和led3flag同时使用静态变量led2count计数闪烁五次后关闭
i2c_hal.c
/*程序说明: CT117E-M4嵌入式竞赛板GPIO模拟I2C总线驱动程序软件环境: MDK-ARM HAL库硬件环境: CT117E-M4嵌入式竞赛板日 期: 2020-3-1
*/#include "i2c_hal.h"#define DELAY_TIME 20/*** @brief SDA线输入模式配置* @param None* @retval None*/
void SDA_Input_Mode()
{GPIO_InitTypeDef GPIO_InitStructure = {0};GPIO_InitStructure.Pin = GPIO_PIN_7;GPIO_InitStructure.Mode = GPIO_MODE_INPUT;GPIO_InitStructure.Pull = GPIO_PULLUP;GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}/*** @brief SDA线输出模式配置* @param None* @retval None*/
void SDA_Output_Mode()
{GPIO_InitTypeDef GPIO_InitStructure = {0};GPIO_InitStructure.Pin = GPIO_PIN_7;GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStructure.Pull = GPIO_NOPULL;GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}/*** @brief SDA线输出一个位* @param val 输出的数据* @retval None*/
void SDA_Output( uint16_t val )
{if ( val ){GPIOB->BSRR |= GPIO_PIN_7;}else{GPIOB->BRR |= GPIO_PIN_7;}
}/*** @brief SCL线输出一个位* @param val 输出的数据* @retval None*/
void SCL_Output( uint16_t val )
{if ( val ){GPIOB->BSRR |= GPIO_PIN_6;}else{GPIOB->BRR |= GPIO_PIN_6;}
}/*** @brief SDA输入一位* @param None* @retval GPIO读入一位*/
uint8_t SDA_Input(void)
{if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET){return 1;}else{return 0;}
}/*** @brief I2C的短暂延时* @param None* @retval None*/
static void delay1(unsigned int n)
{uint32_t i;for ( i = 0; i < n; ++i);
}/*** @brief I2C起始信号* @param None* @retval None*/
void I2CStart(void)
{SDA_Output(1);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SDA_Output(0);delay1(DELAY_TIME);SCL_Output(0);delay1(DELAY_TIME);
}/*** @brief I2C结束信号* @param None* @retval None*/
void I2CStop(void)
{SCL_Output(0);delay1(DELAY_TIME);SDA_Output(0);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SDA_Output(1);delay1(DELAY_TIME);}/*** @brief I2C等待确认信号* @param None* @retval None*/
unsigned char I2CWaitAck(void)
{unsigned short cErrTime = 5;SDA_Input_Mode();delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);while(SDA_Input()){cErrTime--;delay1(DELAY_TIME);if (0 == cErrTime){SDA_Output_Mode();I2CStop();return ERROR;}}SDA_Output_Mode();SCL_Output(0);delay1(DELAY_TIME);return SUCCESS;
}/*** @brief I2C发送确认信号* @param None* @retval None*/
void I2CSendAck(void)
{SDA_Output(0);delay1(DELAY_TIME);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SCL_Output(0);delay1(DELAY_TIME);}/*** @brief I2C发送非确认信号* @param None* @retval None*/
void I2CSendNotAck(void)
{SDA_Output(1);delay1(DELAY_TIME);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);SCL_Output(0);delay1(DELAY_TIME);}/*** @brief I2C发送一个字节* @param cSendByte 需要发送的字节* @retval None*/
void I2CSendByte(unsigned char cSendByte)
{unsigned char i = 8;while (i--){SCL_Output(0);delay1(DELAY_TIME);SDA_Output(cSendByte & 0x80);delay1(DELAY_TIME);cSendByte += cSendByte;delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);}SCL_Output(0);delay1(DELAY_TIME);
}/*** @brief I2C接收一个字节* @param None* @retval 接收到的字节*/
unsigned char I2CReceiveByte(void)
{unsigned char i = 8;unsigned char cR_Byte = 0;SDA_Input_Mode();while (i--){cR_Byte += cR_Byte;SCL_Output(0);delay1(DELAY_TIME);delay1(DELAY_TIME);SCL_Output(1);delay1(DELAY_TIME);cR_Byte |= SDA_Input();}SCL_Output(0);delay1(DELAY_TIME);SDA_Output_Mode();return cR_Byte;
}//
void I2CInit(void)
{GPIO_InitTypeDef GPIO_InitStructure = {0};GPIO_InitStructure.Pin = GPIO_PIN_7 | GPIO_PIN_6;GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStructure.Pull = GPIO_PULLUP;GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStructure);
}uint8_t E2PROM_Read(uint8_t addr)
{uint8_t val;I2CStart();I2CSendByte(0xA0);I2CWaitAck();I2CSendByte(addr);I2CWaitAck();//I2CStop();I2CStart();I2CSendByte(0xA1);I2CWaitAck();val = I2CReceiveByte();I2CWaitAck();I2CStop();return val;
}void E2PROM_Write(uint8_t addr,uint8_t data)
{I2CStart();I2CSendByte(0xA0);I2CWaitAck();I2CSendByte(addr);I2CWaitAck();I2CSendByte(data);I2CWaitAck();I2CStop();
}key.c
#include "key.h"
struct Key key[4] = {0,0,0,0};void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if(htim->Instance==TIM2){key[0].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0);key[1].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1);key[2].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2);key[3].key_gpio = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0);for(int i = 0;i<=3;i++){switch(key[i].key_status){case 0:{if(key[i].key_gpio==0){key[i].key_status = 1;}}break;case 1:{if(key[i].key_gpio==0){key[i].key_status = 2;key[i].key_flag = 1;}else{key[i].key_status = 0;}}break;case 2:{if(key[i].key_gpio==1){key[i].key_status = 0;}}}}}}led.c
#include "led.h"uint32_t led1times,led2times,led3times;
uint8_t led1status=0,led2status=0,led3status=0;
uint8_t led2flag= 0,led3flag=0;
void LED_display(uint8_t led)
{HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOC,led<<8,GPIO_PIN_RESET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}注意i2c再写数据时注意要间隔5ms以上要不然会数据异常
myadc.c
#include "myadc.h"uint32_t adctimes = 0;
float k = 100/(3.3f);//Kֵ
uint32_t height;
float adcval;
uint8_t level;
unsigned char min=30,med=50,max=70;
float get_Adc(ADC_HandleTypeDef *hadc){int val = 0.0f;for(int i = 0; i < 5; i++){HAL_ADC_Start(hadc);HAL_ADC_PollForConversion(hadc, 100); // 等待转换完成val += HAL_ADC_GetValue(hadc);HAL_ADC_Stop(hadc); // 停止ADC转换}return val * 3.3f / 4096.0f / 5.0f; // 计算平均电压值
}usart2.c
#include "usart2.h"uint8_t OneData;
uint8_t rxflag;void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(huart->Instance==USART1){rxflag = 1;HAL_UART_Receive_IT(huart,&OneData,1);}}相关文章:
蓝桥杯嵌入式第七届真题(完成) STM32G431
蓝桥杯嵌入式第七届真题(完成) STM32G431 题目 相关文件 main.c /* USER CODE BEGIN Header */ /********************************************************************************* file : main.c* brief : Main program body**********************…...

如何降低视频RTSP解码延迟
降低RTSP(Real-Time Streaming Protocol)视频流的解码延迟涉及到网络传输和解码处理的优化。以下是一些常见的方法: 选择低延迟的解码器:使用专为低延迟优化的解码器,例如一些定制的H.264或H.265解码器。 优化解码器设…...

【Golang】自定义logrus日志保存为日志文件
背景 为了方便查看日志,项目中需要把日志保存到对应的日志文件中,所以需要当前的配置,以使得日志能够保存到对应的日志文件中。 代码 import ("github.com/orandin/lumberjackrus""github.com/sirupsen/logrus" )func …...
【大厂AI课学习笔记】1.4 算法的进步(4)关于李飞飞团队的ImageNet
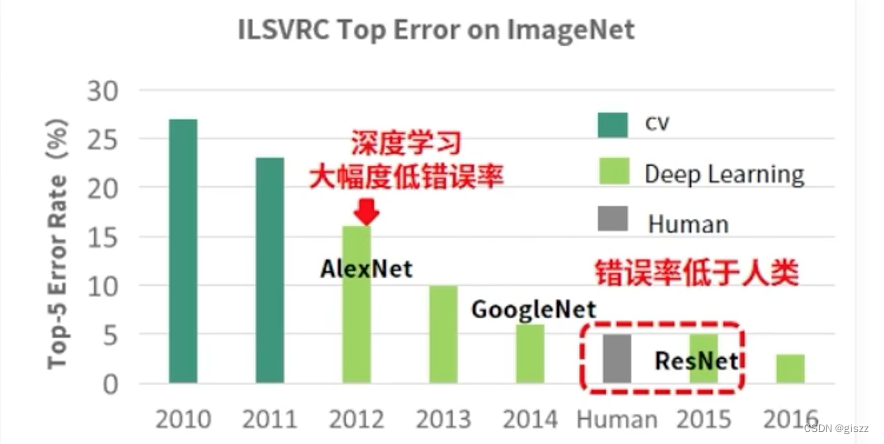
第一个图像数据库是ImageNet,由斯坦福大学的计算机科学家李飞飞推出。ImageNet是一个大型的可视化数据库,旨在推动计算机视觉领域的研究。这个数据库包含了数以百万计的手工标记的图像,涵盖了数千个不同的类别。 基于ImageNet数据库…...
【Linux笔记】缓冲区的概念到标准库的模拟实现
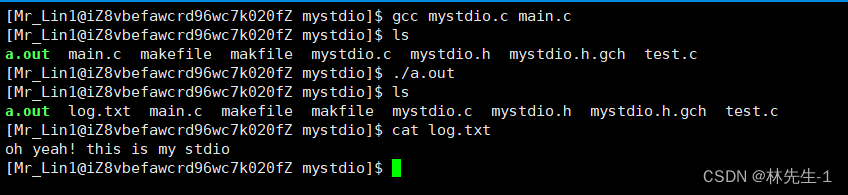
一、缓冲区 “缓冲区”这个概念相信大家或多或少都听说过,大家其实在C语言阶段就已经接触到“缓冲区”这个东西,但是相信大家在C语言阶段并没有真正弄懂缓冲区到底是个什么东西,也相信大家在C语言阶段也因为缓冲区的问题写出过各种bug。 其…...
【前端收藏】前端小作文-前端八股文知识总结(超万字超详细)持续更新
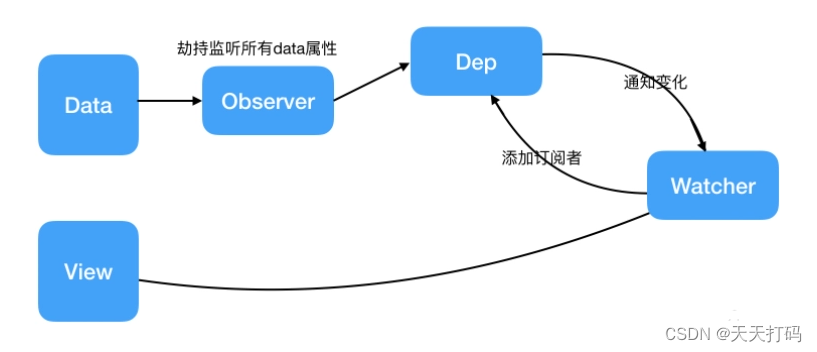
有了这个八股文不仅对你基础知识的巩固,不管你是几年老前端程序员,还是要去面试的,文章覆盖了前端常用及不常用的方方面面,都是前端日后能用上的,对你的前端知识有总结意义,看完后,懂的不懂的都…...

GNSS模块的惯导技术:引领定位科技的前沿
全球导航卫星系统(GNSS)模块的惯导技术是一项颇具前瞻性的科技,它结合了全球定位系统和惯性导航技术,为各个领域的定位需求提供了更为精准和可靠的解决方案。本文将深入探讨GNSS模块的惯导技术,以及它如何在多个领域中…...
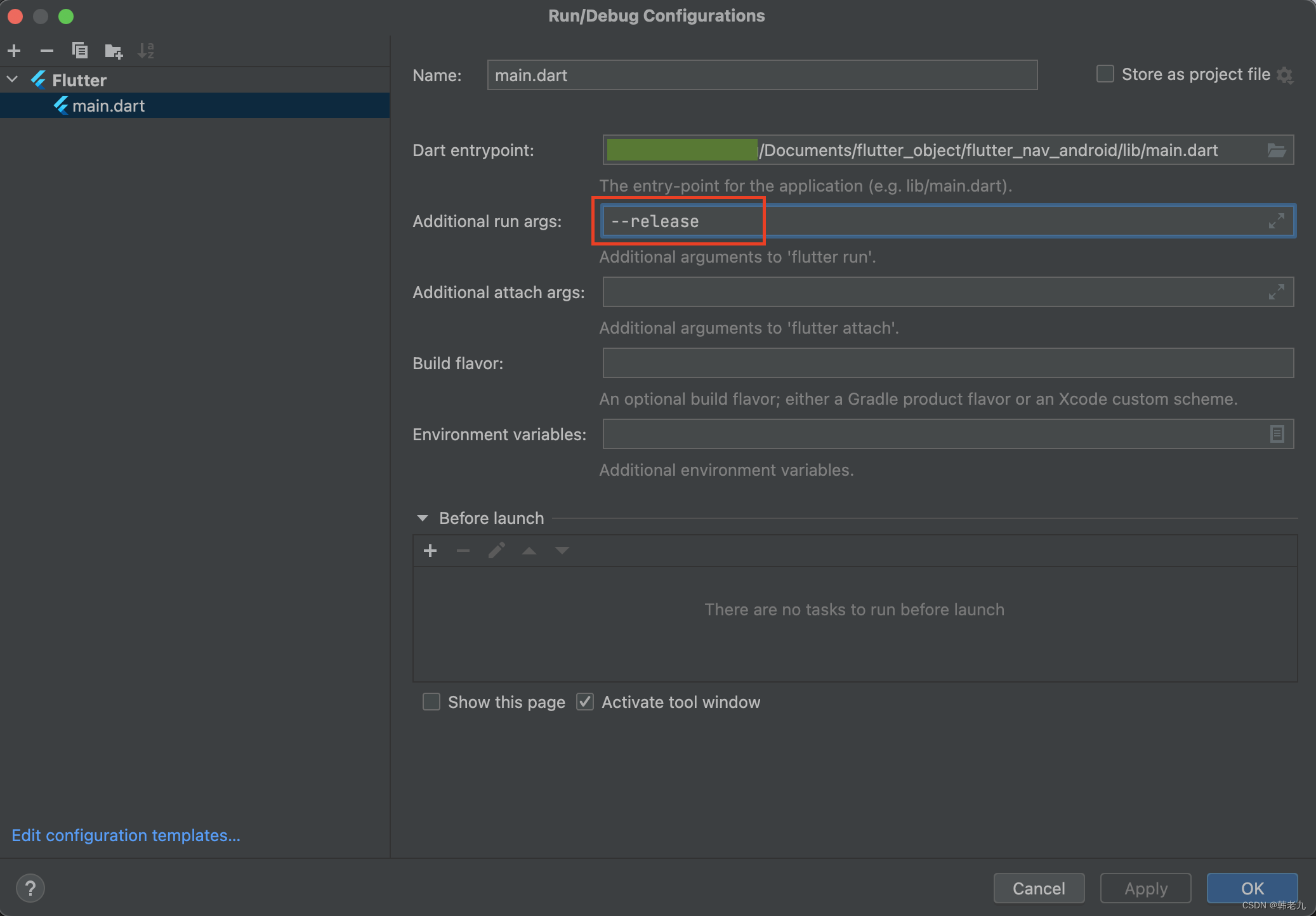
Flutter 和 Android原生(Activity、Fragment)相互跳转、传参
前言 本文主要讲解 Flutter 和 Android原生之间,页面相互跳转、传参, 但其中用到了两端相互通信的知识,非常建议先看完这篇 讲解通信的文章: Flutter 与 Android原生 相互通信:BasicMessageChannel、MethodChannel、…...
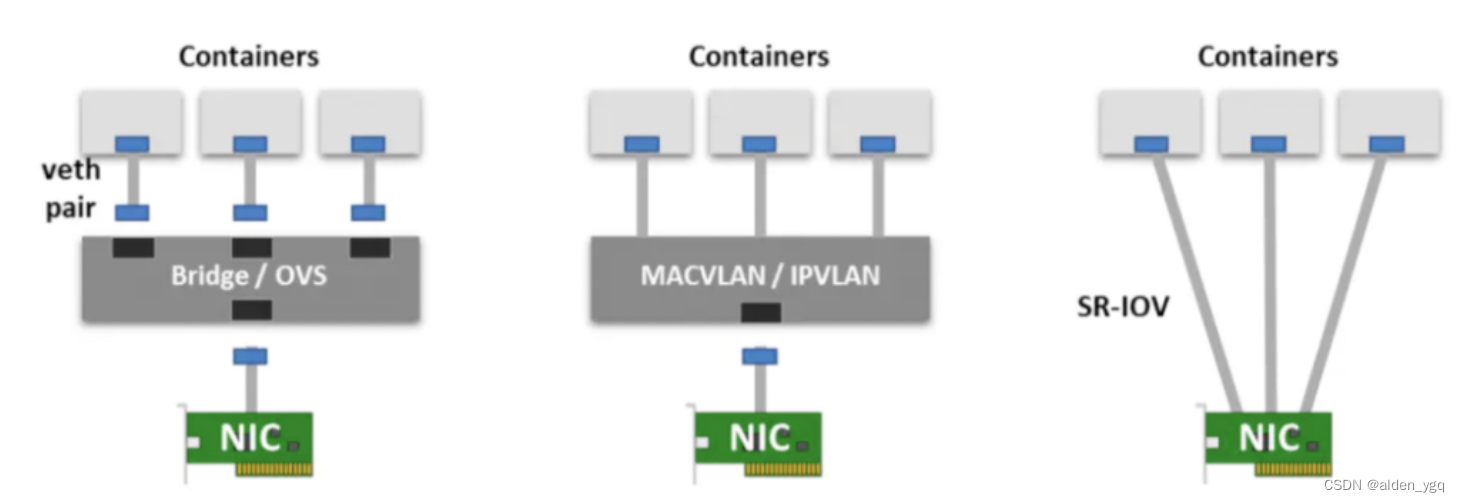
Kubernetes基础(十一)-CNI网络插件用法和对比
1 CNI概述 1.1 什么是CNI? Kubernetes 本身并没有实现自己的容器网络,而是借助 CNI 标准,通过插件化的方式来集成各种网络插件,实现集群内部网络相互通信。 CNI(Container Network Interface,容器网络的…...

yo!这里是单例模式相关介绍
目录 前言 特殊类设计 只能在堆上创建对象的类 1.方法一(构造函数下手) 2.方法二(析构函数下手) 只能在栈上创建对象的类 单例模式 饿汉模式实现 懒汉模式实现 后记 前言 在面向找工作学习c的过程中,除了基本…...
2023年上-未来几年我要做什么
1月份,离职。 2月份,春节休假回来,中旬去参加了一个月的瑜伽培训,学会了倒立、鹤蝉。。。。 3月份,瑜伽培训结束,开始收拾房子,并调研各类项目。 4月份,参与了朋友的区块链项目 …...
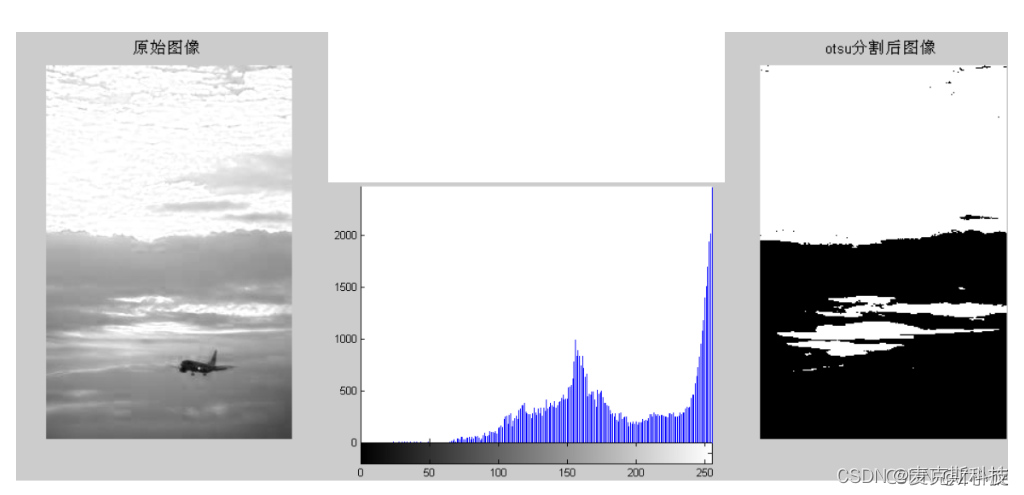
智能汽车竞赛摄像头处理(3)——动态阈值二值化(大津法)
前言 (1)在上一节中,我们学习了对图像的固定二值化处理,可以将原始图像处理成二值化的黑白图像,这里面的本质就是将原来的二维数组进行了处理,处理后的二维数组里的元素都是0和255两个值。 (2…...

BGP协议
1.BGP相关概念 1.1 BGP的起源 不同自治系统(路由域)间路由交换与管理的需求推动了EGP的发展,但是EGP的算法简单,无法选路,从而被BGP取代。 自治系统:(AS) IGP:自治系统…...
一个完整工作流管理系统的组成部分
一个完整工作流管理系统的组成部分 一个完整的工作流管理系统通常由工作流引擎、工作流设计器、流程操作、工作流客户端程序、流程监控、表单设计器、与表单的集成以及与应用程序的集成八个部分组成。 一、工作流组成 1. 工作流引擎 工作流引擎作为工作流管理系统的核心部分&…...
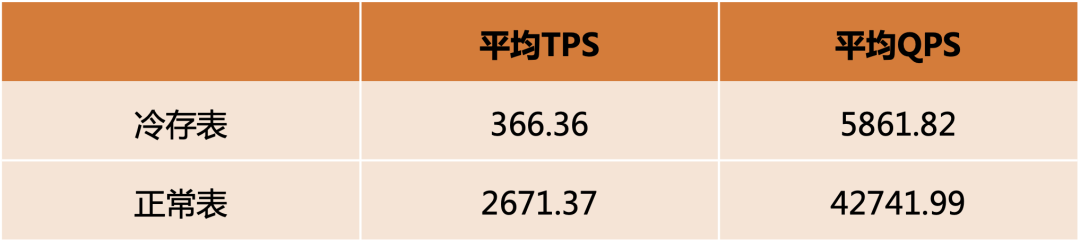
鱼和熊掌如何兼得?一文解析RDS数据库存储架构升级
在2023年云栖大会上,阿里云数据库产品事业部负责人李飞飞在主题演讲中提到,瑶池数据库推出“DB存储”一体化能力,结合人工智能、机器学习、存储等方法和创新能力,实现Buffer Pool Extension能力和智能冷温热数据分层能力。在大会的…...
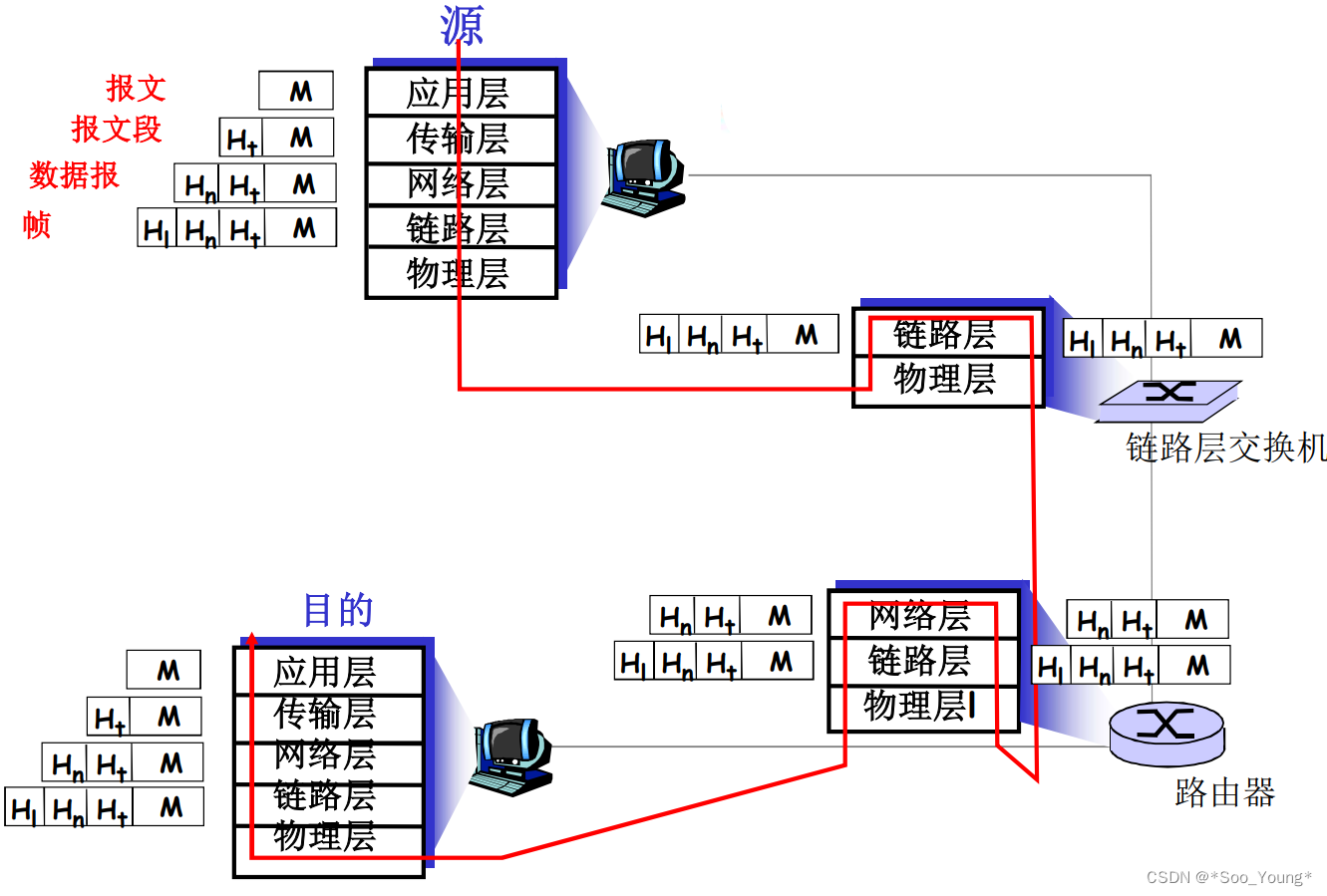
中科大计网学习记录笔记(五):协议层次和服务模型
前言: 学习视频:中科大郑烇、杨坚全套《计算机网络(自顶向下方法 第7版,James F.Kurose,Keith W.Ross)》课程 该视频是B站非常著名的计网学习视频,但相信很多朋友和我一样在听完前面的部分发现信…...

同构异机迁移方案2_目标服务器仅安装数据库软件scp物理文件
源端和目标端的数据库版本需要保持一致,补丁版本可以不一致,目标端磁盘空间不能小于源端空间,目标端只需要安装 Oracle 软件即可。 特别说明:本文档案例Oracle的安装路径不同,数据目录一致,采用scp的方式实…...

华为机考入门python3--(6)牛客6-质数因子
分类:质数、素数 知识点: 取余符号% 5%3 2 取整符号// 5//3 1 list中int元素转str map(str, list) 题目来自【牛客】 def prime_factors(n): """ 输入一个正整数n,输出它的所有质因子(重复的也…...

11月最新版付费进群源码自动定位+开源
Nginx 1.22.1 php5.6 mysql5.6 数据库配置:/config/database.php 配置后台域名:config/extra/ip.php 设置伪静态thinkphp 后台账号88886666 密码12345 代码结构 关键代码剖析 <?php // ----------------------------------------------------…...

Python算法题集_旋转图像
Python算法题集_旋转图像 题目48:旋转图像1. 示例说明2. 题目解析- 题意分解- 优化思路- 测量工具 3. 代码展开1) 标准求解【矩阵复本】2) 改进版一【矩阵转置矩阵反转】3) 改进版二【四值旋转】 4. 最优算法 题目48:旋转图像 本文为Python算法题集之一…...

鱼皮 AI 导航网站,突然起飞了!
大好家,我是程序员鱼皮。 去年 11 月,我带团队开发了一个 完全免费 的网站,也就是「鱼皮 AI 导航」。 如今 AI 真的太火了,一定是未来的大趋势;再加上很多关注我的朋友私信我,问怎么获取 AI 工具和教程&am…...

大模型学习指南:小白程序员必备,收藏这份2026年开源大模型体系与实战教程!
大模型学习指南:小白程序员必备,收藏这份2026年开源大模型体系与实战教程! 本文全面介绍了2026年主流开源大模型体系(如Llama、Qwen、Mistral等),解析了Prefix Decoder、Causal Decoder、Encoder-Decoder的…...

解决VirtualBox/VMware虚拟机在win10下运行ensp时AR启动卡死问题
未经授权,禁止转载!1.环境准备与确认首先 ,确认你的虚拟机是否是windows10,例如我的虚拟机操作系统如下:2.然后,确认你的环境是否正确,重点查看VirtualBox是否是"VirtualBox-5.2.44-139111…...

降AI方法选错了会有什么后果?这几个坑别踩
降AI方法选错了会有什么后果?这几个坑别踩 降AI率这件事,大部分同学觉得"无非就是降没降下来",以为选错方法最多就是浪费点时间。 实际上,有几种后果比这更严重。 后果一:浪费宝贵时间,错过截止…...

ai一键生成tomcat配置脚本,三分钟搞定java web服务器环境搭建
今天想和大家分享一个超级实用的技巧——如何用AI工具快速搞定Tomcat服务器的安装和配置。作为一个Java Web开发者,每次在新环境搭建Tomcat总免不了要折腾半天,直到发现了InsCode(快马)平台的AI生成功能,整个过程变得异常简单。 环境自动适配…...

共聚焦显微技术在高分子科学中的应用与实践
研究高分子材料的微观结构,传统方法面临一个永恒的困境:要看到内部,就得破坏样品;要保持样品完整,就只能观察表面。如今已跨越学科边界,成为高分子材料工业研发的重要工具。下文是光子湾共聚焦显微镜解析这…...

ERPC 多区域 Solana RPC 基础设施架构:Bundle Standard方案动态扩展与全球端点部署实践
概述 ERPC 近期对其 Bundle Standard 方案进行了扩展升级,支持按持有凭证数量动态分配多个独立方案实例。这一机制使开发者能够将 Solana RPC、Geyser gRPC 和 Shredstream 端点灵活部署到全球多个区域,同时满足开发环境与生产环境分离的需求。 本文将…...

鸣潮帧率解锁:用WaveTools轻松突破60FPS限制的终极指南
鸣潮帧率解锁:用WaveTools轻松突破60FPS限制的终极指南 【免费下载链接】WaveTools 🧰鸣潮工具箱 项目地址: https://gitcode.com/gh_mirrors/wa/WaveTools 还在为鸣潮被锁定在60FPS而烦恼吗?明明拥有高性能硬件,却只能在低…...

基于QGIS分区统计与栅格重分类的GlobeLand30地表覆盖面积精准测算
1. 数据准备与预处理 做地表覆盖分析的第一步就是获取高质量的数据源。GlobeLand30作为国产30米分辨率全球地表覆盖数据,在精度和易用性上都有不错的表现。我去年参与的一个省级生态评估项目就用到了这套数据,实测下来分类效果相当可靠。 下载数据时有个…...

破解Silk音频兼容性难题:从格式转换到跨平台播放的完整解决方案
破解Silk音频兼容性难题:从格式转换到跨平台播放的完整解决方案 【免费下载链接】silk-v3-decoder [Skype Silk Codec SDK]Decode silk v3 audio files (like wechat amr, aud files, qq slk files) and convert to other format (like mp3). Batch conversion supp…...