【高质量精品】2024美赛B题22页word版高质量半成品论文+多版保奖思路+数据+前四问思路代码等(后续会更新)
一定要点击文末的卡片,进入后,获取完整论文!!
B 题整体模型构建
1. 潜水器动力系统失效:模型需要考虑潜水器在无推进力情况下的行为。
2. 失去与主船通信:考虑无法从主船接收指令或发送位置信息的情况。
3. 中性浮力和海底定位:潜水器可能位于海底或达到水下某个中性浮力点。 4. 水流和海水密度变化:影响潜水器位置的环境因素。
5. 海底地理:海底的地形可能会影响潜水器的最终位置或移动路径。
数学模型和公式
为预测潜水器的位置,我们可以建立基于物理学原理的动态模型,考虑力学和流体动力 学的因素。以下是潜水器运动的基本方程:
动力学方程
设潜水器的质量为 mm ,受到的浮力为 FbF_b ,重力为 FgF_g ,水流对潜水器施加 的力为 FcF_c ,潜水器在水中的阻力为 F_d ,则潜水器的运动方程可表示为:
md2r→dt2=Fb→+Fg→+Fc→− Fd→ m\frac{d^2\vec{r}}{dt^2} = \vec{F_b} + \vec{F_g} + \vec{F_c} - \vec{F_d}
其中, r →\vec{r} 是潜水器的位置向量, tt 是时间。
mm :潜水器的质量
Fb→\vec{F_b} :浮力,方向向上
Fg→=m ⋅ g\vec{F_g} = m \cdot g :重力,方向向下, gg 是重力加速度
Fc→\vec{F_c} :水流对潜水器的作用力,方向依赖于水流方向
Fd→\vec{F_d} :阻力,方向与潜水器运动方向相反,大小可以用 Fd=12ρv2CdAF_d =
\frac{1}{2} \rho v^2 C_d A 来估计,其中 ρ\rho 是水的密度, vv 是潜水器相对于水的速 度, CdC_d 是阻力系数,$A$ 是潜水器迎水面积
潜水器浮力和阻力的计算
浮力 FbF_b 可以通过潜水器排水量和水的密度来计算,阻力 FdF_d 可以根据潜水器的 形状、表面粗糙度和运动速度来估算。
数值解法
潜水器的运动方程是一个二阶微分方程,我们可以采 用数值方法(如欧拉方法或龙格-库塔方法)对其进行求解,得到潜水器随时间变化的 位置和速度。
模型假设
. 潜水器被视为质点,忽略其尺寸和形状的影响。
. 假设水流速度和方向是已知的,可以从海洋流动模型获得。
. 海底地形对潜水器运动的影响通过调整浮力和阻力参数来模拟。
通过上述模型和方法,我们可以预测在不同情况下潜水器的位置,为 MCMS 制定安全程 序提供科学依据。
为了解决上述复杂的数学建模问题,我们将问题分解为四个主要部分:定位、准备、搜 索和外推。下面是针对每个部分的详细分析和数学模型。
定位
模型构建
. 基于多传感器融合的动态预测模型:利用卡尔曼滤波(Kalman Filter)或扩展卡尔曼滤波 (Extended Kalman Filter, EKF)来整合来自潜水器内部(如 IMU 传感器)和外部(如声纳、 GPS 浮标)的多源信息,预测潜水器随时间变化的位置。
数学公式
假设潜水器的状态为 x →t= [xt,yt,zt,x˙t,y˙t,z˙t]T\vec{x}_t = [x_t, y_t, z_t, \dot{x}_t, \dot{y}_t, \dot{z}_t]^T ,
其中 xt,yt,ztx_t, y_t, z_t 表示潜水器在三维空间中的位置,
x˙t,y˙t,z˙t\dot{x}_t, \dot{y}_t, \dot{z}_t 表示对应的速度。
卡尔曼滤波的预测和更新步骤如下:
. 预测步骤: x →t |t− 1=F →tx→t− 1 |t− 1+B→tu→t \vec{x}_{t |t- 1} = \vec{F}_t \vec{x}_{t- 1 |t- 1} + \vec{B}_t \vec{u}_t P →t |t− 1=F →tP→t− 1 |t− 1F→tT+Q→t \vec{P}_{t |t- 1} = \vec{F}_t \vec{P}_{t- 1 |t- 1} \vec{F}_t^T + \vec{Q}_t
. 更新步骤: K →t=P →t |t− 1H→tT(H→tP→t |t− 1H→tT+R→t)−1 \vec{K}_t = \vec{P}_{t|t- 1} \vec{H}_t^T (\vec{H}_t \vec{P}_{t |t- 1} \vec{H}_t^T + \vec{R}_t)^{- 1} x →t |t=x →t |t− 1+K→t(z →t− H →tx→t |t− 1) \vec{x}_{t |t} = \vec{x}_{t |t- 1} + \vec{K}_t (\vec{z}_t - \vec{H}_t \vec{x}_{t |t- 1}) P→t |t=(I− K →tH→t)P→t |t− 1 \vec{P}_{t |t} = (I - \vec{K}_t \vec{H}_t) \vec{P}_{t |t- 1}
其中, F →t\vec{F}_t 是状态转移矩阵, B →t\vec{B}_t 是控制输入矩阵, u →t\vec{u}_t 是外部控制输入,P →t\vec{P}_t 是估计误差协方差,Q→t\vec{Q}_t 是过程噪声协方差, H →t\vec{H}_t 是观测模型矩阵, R →t\vec{R}_t 是观测噪声协方差, K →t\vec{K}_t 是卡 尔曼增益, z →t\vec{z}_t 是实际观测值。
不确定性分析
. 主要的不确定性来源包括传感器噪声、模型误差、外部环境(如水流变化和海底地形)的未 知性。蒙特卡洛模拟(Monte Carlo Simulation)可用于评估这些不确定性对预测准确性的影 响。
一定要点击文末的卡片,进入后,获取完整论文!!
相关文章:
【高质量精品】2024美赛B题22页word版高质量半成品论文+多版保奖思路+数据+前四问思路代码等(后续会更新)
一定要点击文末的卡片,进入后,获取完整论文!! B 题整体模型构建 1. 潜水器动力系统失效:模型需要考虑潜水器在无推进力情况下的行为。 2. 失去与主船通信:考虑无法从主船接收指令或发送位置信息的情况。…...

apache_exporter安装说明
Apache Exporter 问题描述 需要监控apache服务,部署了apache_exporter,对过程进行一下记录。 源码参见apache_exporter ①下载 https://github.com/Lusitaniae/apache_exporter/releases②解压缩 tar -xzvf apache_exporter-0.7.0.linux-amd64.tar…...

代码随想录算法训练营29期Day42|卡码网46,LeetCode 416
文档讲解:背包问题二维 背包问题一维 分割等和子集 46.整数拆分 题目链接:https://kamacoder.com/problempage.php?pid1046 思路: 在一维dp数组中,dp[j]表示:容量为j的背包,所背的物品价值可以最大为d…...
java的excel列行合并模版
1.效果 2.模版 <tableborder"1"cellpadding"0"cellspacing"0"class"tablebor"id"TABLE"><tr align"center" class"bg217"><td style"background-color: #008000; color: #ffffff;p…...

【ES数据可视化】kibana实现数据大屏
目录 1.概述 2.绘制数据大屏 2.1.准备数据 2.2.绘制大屏 3.嵌入项目中 1.概述 再来重新认识一下kibana: Kibana 是一个用于数据可视化和分析的开源工具,是 Elastic Stack(以前称为 ELK Stack)中的一部分,由 Ela…...

2024 年十大 Vue.js UI 库
Vue.js 是一个流行的 JavaScript 框架,它在前端开发者中越来越受欢迎,以其简单、灵活和易用性而闻名。 Vue.js 如此受欢迎的原因之一是它拥有庞大的 UI 库生态系统。 这些库为开发人员提供了预构建的组件和工具,帮助他们快速高效地构建漂亮…...
使用esp32 cam + SR602人体感应模块制作一个小型的监控
需求: 做一个小型的监控,类似电子猫眼,监测到人之后,取一张图 然后发送到自己的邮箱。 架构: 1.sr602 传感器监测到人 2. esp32 cam 取图 并通过mqtt协议传到远端服务器 3, 服务器利用python 搭建一个mqtt客户端&…...

vim最简单命令学习
安装vim sudo apt install vim在终端随便打开一个文本文件,或者源文件, vim filepath输入该命令后,从终端进入vim编辑器,此时为普通模式(Normal)。 按i键进入编辑模式(Insert),按Esc键返回普通模式(Normal)。 在编辑…...

论文阅读-通过云特征增强的深度学习预测云工作负载转折点
论文名称:Cloud Workload Turning Points Prediction via Cloud Feature-Enhanced Deep Learning 摘要 云工作负载转折点要么是代表工作负载压力的局部峰值点,要么是代表资源浪费的局部谷值点。预测这些关键点对于向系统管理者发出警告、采取预防措施以…...

Android Studio从零基础到APP上线(3)
第3章 简单控件 本章介绍App开发常见的几类简单控件的用法,主要包括:显示文字的文本视图,容纳视图的常用布局,响应点击的按钮控件,显示图片的图像视图等。然后结合本章所学的知识,演示一个实战项目“简单计算器”的设计与实现。 3.1 文本显示 本节介绍如何在文本视图Tex…...

springboot Feign方式注入注解详解
一、FeignClient注解详解 FeignClient是Spring Cloud中用于声明Feign客户端的注解,它使得编写HTTP客户端变得更简单。通过Feign的自动化配置机制,可以很容易地编写HTTP API客户端。以下是FeignClient的详解: 作用:FeignClient注解…...
自然语言处理(NLP)—— Dialogflow ES聊天机器人
1. 背景介绍 这个实验室的目标是让你了解并使用Google的Dialogflow服务。Dialogflow是一个可以让你创建聊天机器人的服务,这个过程不需要或者只需要很少的编程技能。 1.1 账号的创建 为了完成这个实验室,你需要在以下网站上创建账号:…...

C++俄罗斯方块 -- 菜单展示和选择 -- 方法
short Menu() //选中开始游戏返回1,离开则返回2 {short choice 1;//跟踪用户选中的选项char c; //记录用户按键信息system("cls");SetPos(9, 12); //设置输出坐标,12行9列cout << "┌────────┐";SetPos(9, 13);cou…...
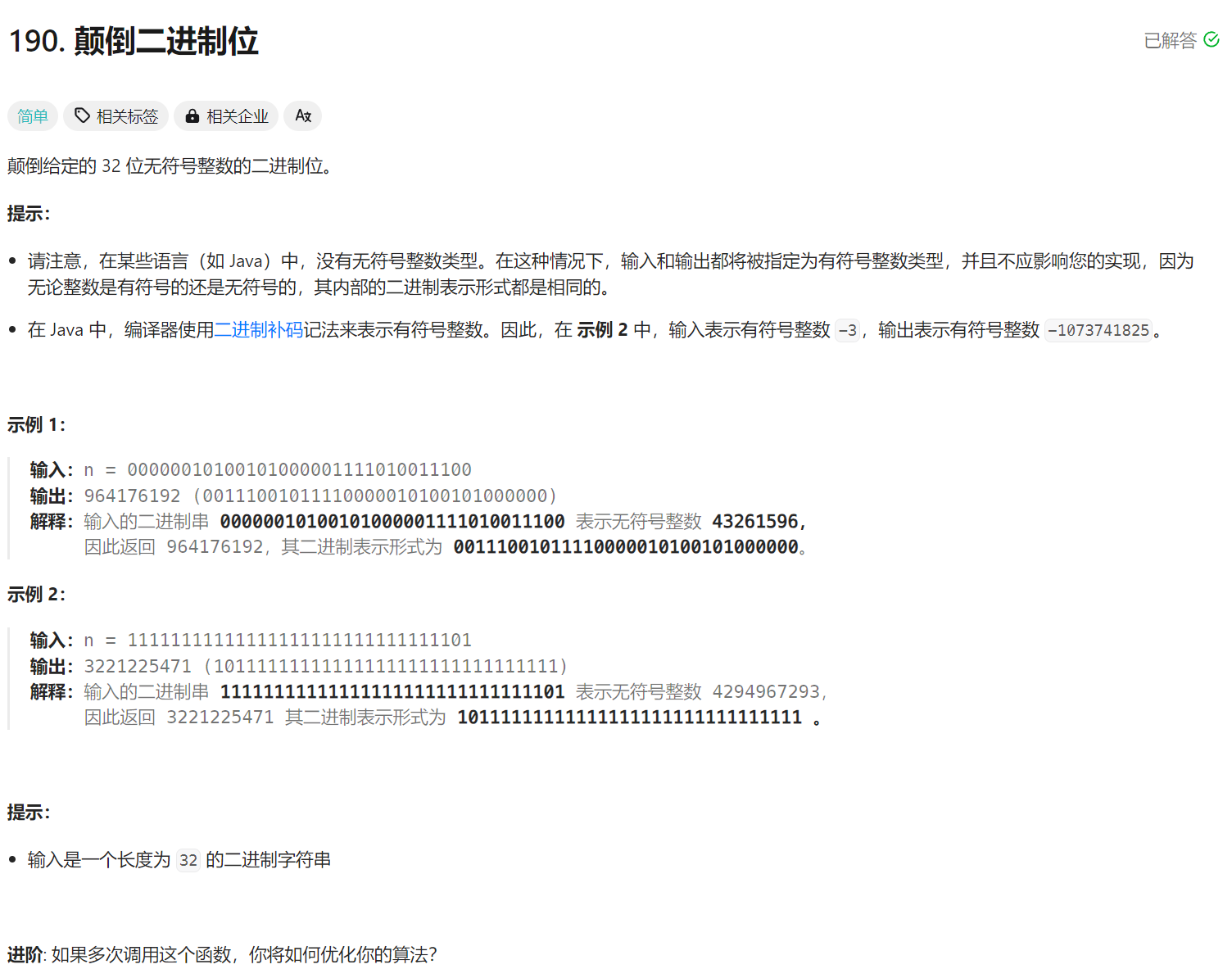
面试150 颠倒二进制位 位运算分治 逻辑右移
Problem: 190. 颠倒二进制位 文章目录 思路复杂度位运算分治法 思路 👨🏫 参考题解 >>>:逻辑右移(符号位一起移动,高位补零) 复杂度 时间复杂度: O ( log n ) O(\log{n}) O(logn) 空间…...

php 函数三
一 对称加密 1.1 openssl 1.1.1 openssl_get_cipher_methods(bool $aliases false) 获取可用的加密算法。包含可用加密算法的array。 请注意:在 OpenSSL 1.1.1 版本之前,返回加密算法的拼法大小写都有; 从 OpenSSL 1.1.1 开始,…...

Windows下配置多个账号的git ssh
生成密钥 已经有一个密钥的情况下,用下面的命令生成一个新密钥,注意为了防止原始密钥文件被覆盖,需要给一个新名字: ssh-keygen -t rsa -f C:\\Users\\xxx\\.ssh\\id_rsa_xxx -C "xxxemail.com"给GitHub配置SSH Key …...
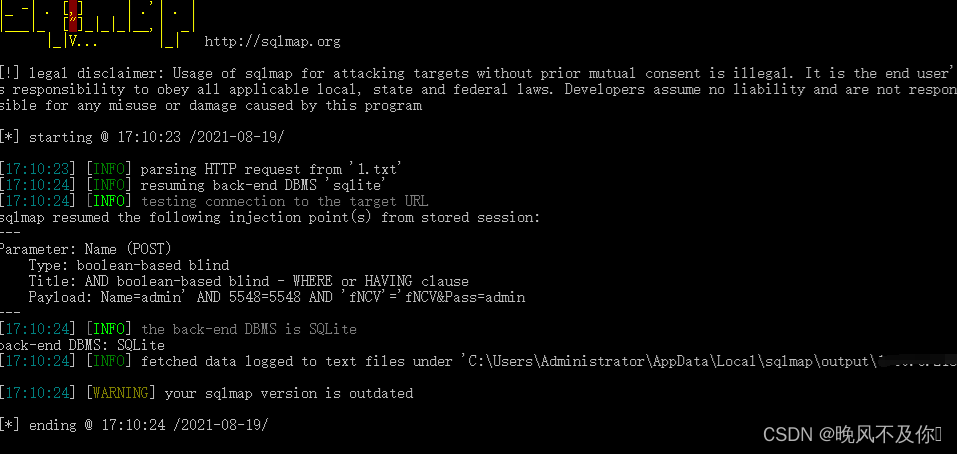
【漏洞复现】电信网关配置管理系统SQL注入漏洞
Nx01 产品简介 电信网关配置管理系统是一个用于管理和配置电信网络中网关设备的软件系统。它可以帮助网络管理员实现对网关设备的远程监控、配置、升级和故障排除等功能,从而确保网络的正常运行和高效性能。 Nx02 漏洞描述 电信网关配置管理系统存在SQL注入漏洞,攻…...
2018年苏州大学837复试机试C/C++
2018年苏州大学复试机试 要求 要求用C/C编程;对程序中必要的地方进行注释。上机规则 请在电脑桌面上新建一个文件夹文件夹名为考试姓名(中文);考试完毕后,将所编写的文件放在上述文件中。 第一题(20分&…...
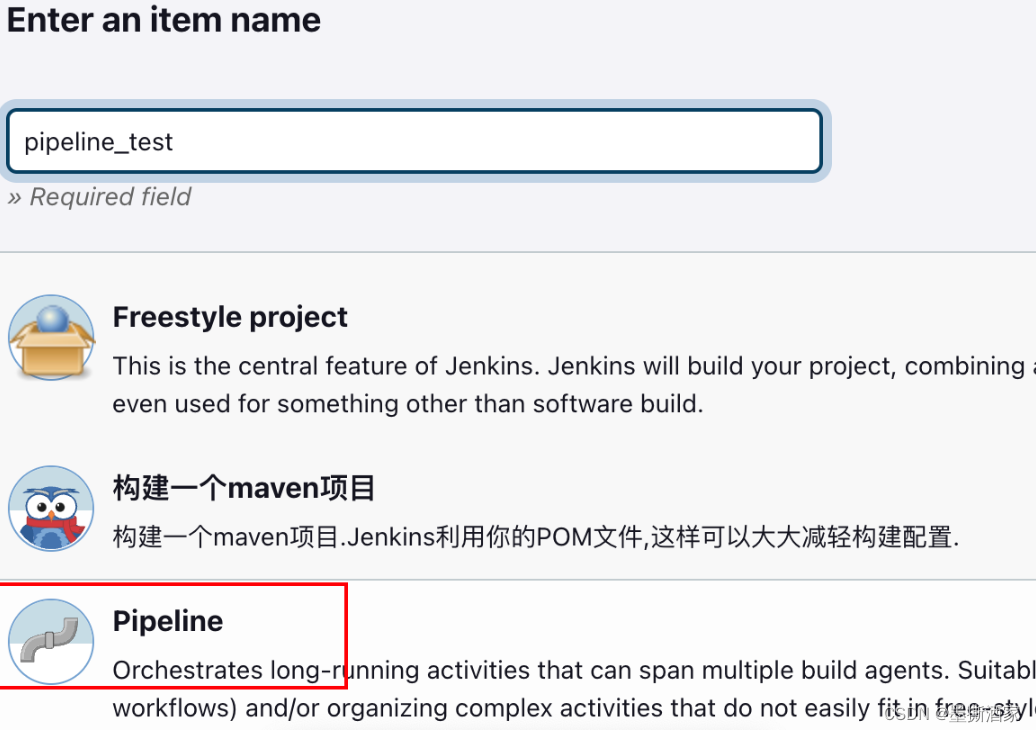
【Jenkins】pipeline基本使用
目录 一、pipeline 二、创建pipeline项目 1、安装pipeline插件 2、创建pipeline项目 三、pipeline语法 1、pipeline组成 2、agent:指定流水线的执行位置,流水线中每个阶段都必须在某个地方执行 3、stage:阶段,代表流水线的…...

Bytebase 签约 Vianova,助力欧洲城市交通智能平台中 Snowflake 和 PG 的变更自动化及版本控制
在数字化发展的浪潮中,自动化数据库变更管理成为提升产品上线效率、降低人为失误风险的关键工具,同时促进流程的一致性与标准化,确保合规性和变更的可追溯性。近日,数据库 DevOps 团队协同管理工具 Bytebase 签约欧洲交通数据管理…...

VideoRAG框架解析:基于知识图谱的超长视频理解与对话系统
1. 项目概述:当视频太长,AI也“看”不过来时,我们做了什么作为一名长期混迹在AI和多媒体技术交叉领域的开发者,我经常遇到一个头疼的问题:现在的多模态大模型(MLLM)处理图片、理解短视频都挺溜&…...
)
嘉兴看牙哪家靠谱?2026年本地6家口腔机构实测排行榜(纯生活体验版)
问这个问题的人,多半是被坑过、排过队、或者被推销烦过。作为一个在嘉兴生活了快十年的普通市民,补牙、洗牙、带孩子看牙都经历过,我也踩过不少坑。这次花了两周时间,跑了南湖、秀洲、平湖几家口碑还行的口腔机构,纯从…...

月薪8K到年薪80万!这个AI职位一年暴涨985%,普通人如何抓住风口?2026年最火爆的5个岗位+3条入场路径全解析!
文章讲述了AI Agent开发工程师的兴起,年薪可达80万。文章以小李的真实故事为例,展示了通过主动学习AI技术,可以实现职业的巨大转变。文章还分析了Agentic AI的特点及其对就业市场的影响,指出40%的岗位将被重新定义。文章列举了AI …...

从“左撇子困境”看包容性设计:打破设计偏见,提升产品普适性
1. 设计中的“左撇子困境”:一个被忽视的普适性问题作为一名在硬件设计和产品开发领域摸爬滚打了十几年的工程师,我经常和团队讨论“用户体验”和“人机工程学”。这些词听起来高大上,但它们的本质,往往就藏在一些最不起眼的日常细…...

OctoSuite代码审查:深入理解GitHub数据模型设计的5个关键要点
OctoSuite代码审查:深入理解GitHub数据模型设计的5个关键要点 【免费下载链接】octosuite Terminal-based toolkit for GitHub data analysis. 项目地址: https://gitcode.com/gh_mirrors/oc/octosuite OctoSuite是一个强大的终端GitHub数据分析工具包&#…...

如何用嘎嘎降AI处理期刊投稿论文:SCI核心期刊论文全流程降AI4.8元完整操作教程
如何用嘎嘎降AI处理期刊投稿论文:SCI核心期刊论文全流程降AI4.8元完整操作教程 第一次用降AI工具会遇到很多不确定的地方——传什么格式、选哪个模式、怎么验收效果。 这篇教程把常见问题都覆盖了,主要基于嘎嘎降AI(www.aigcleaner.com&…...

2026届学术党必备的十大AI写作网站解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 针对AI领域当中的那批研究者,以及高校里的老师和学生,还有产业方面的…...

五分钟 熟悉所有Claude Code指令
废话不多说,直接上干货,点赞收藏一、 启动与退出cd xx #进入你的项目 claude start # 启动 Claude Code claude exit # 退出二、查看帮助claude /help # 显示所有命令及使用说明 claude /status # 查看当前会话状态三、文件操作claude /add <file&g…...

全栈开发真的是万能解药吗?3年全栈开发者的血泪教训
一、从测试视角看全栈热:光环下的误解作为软件测试从业者,你一定不止一次在行业论坛、招聘启事里看到“全栈开发”这四个字。它像一个自带聚光灯的概念,被描绘成能独当一面解决所有技术问题的“万能解药”——前端页面布局、后端逻辑搭建、数…...

AI治理实战:从公平性、可解释性到MLOps全流程落地
1. 项目概述与核心价值最近在整理开源项目时,发现了一个名为“AI_governance”的仓库,作者是bhavya7995。这个标题立刻引起了我的兴趣。在AI技术飞速渗透到各行各业,从代码生成到内容创作,从自动驾驶到医疗诊断的今天,…...