【OpenVINO™】在 MacOS 上使用 OpenVINO™ C# API 部署 Yolov5 (下篇)
项目介绍YOLOv5 是革命性的 "单阶段"对象检测模型的第五次迭代,旨在实时提供高速、高精度的结果,是世界上最受欢迎的视觉人工智能模型,代表了Ultralytics对未来视觉人工智能方法的开源研究,融合了数千小时研发中积累的经验教训和最佳实践。同时官方发布的模型已经支持 OpenVINO™ 部署工具加速模型推理,因此在该项目中,我们将结合之前开发的 OpenVINO™ C# API 部署 YOLOv5 DET 模型实现物体对象检测。
项目链接为:
https://github.com/guojin-yan/OpenVINO-CSharp-API项目源码链接为:
https://github.com/guojin-yan/OpenVINO-CSharp-API-Samples/tree/master/model_samples/yolov5/yolov5_det_opencvsharp https://github.com/guojin-yan/OpenVINO-CSharp-API-Samples/tree/master/model_samples/yolov5/yolov5_det_emgucv文章目录
- 3. Yolov5 DET 项目配置(OpenCvSharp版)
- 3.1 项目创建
- 3.2 添加项目依赖
- 3.3 定义预测方法
- (1) 使用常规方式部署模型
- (2) 使用模型结构处理处理数据
- (3) 使用 OpenVINO™ C# API 封装的接口
- 3.4 预测方法调用
- 4. Yolov5 DET 项目配置(Emgu.CV 版)
- 4.1 添加项目依赖
- 4.2 定义预测方法
- 5. 项目运行与演示
- 5.1 项目编译
- 6. 总结
3. Yolov5 DET 项目配置(OpenCvSharp版)
3.1 项目创建
如果开发者第一次在MacOS系统上使用C#编程语言,可以参考《在MacOS系统上配置OpenVINO™ C# API》文章进行配置。
首先使用dotnet创建一个测试项目,在终端中输入一下指令:
dotnet new console --framework net6.0 --use-program-main -o yolov5-det
3.2 添加项目依赖
MacOS系统目前主要分为两类,一类是使用intel处理器的X64位的系统,一类是使用M系列芯片的arm64位系统,目前OpenVINO官方针对这两种系统都提供了编译后的系统,所以目前OpenVINO.CSharp.API针对这两种系统都提供了支持。
此处以M系列处理器的MacOS平台为例安装项目依赖,首先是安装OpenVINO™ C# API项目依赖,在命令行中输入以下指令即可:
dotnet add package OpenVINO.CSharp.API
dotnet add package OpenVINO.runtime.macos-arm64
dotnet add package OpenVINO.CSharp.API.Extensions
dotnet add package OpenVINO.CSharp.API.Extensions.OpenCvSharp
关于在MacOS上搭建 OpenVINO™ C# API 开发环境请参考以下文章: 在MacOS上搭建OpenVINO™C#开发环境
接下来安装使用到的图像处理库 OpenCvSharp,在命令行中输入以下指令即可:
dotnet add package OpenCvSharp4
dotnet add package OpenCvSharp4.Extensions
dotnet add package OpenCvSharp4.runtime.osx_arm64 --prerelease
关于在MacOS上搭建 OpenCvSharp 开发环境请参考以下文章: 【OpenCV】在MacOS上使用OpenCvSharp
添加完成项目依赖后,项目的配置文件如下所示:
<Project Sdk="Microsoft.NET.Sdk"><PropertyGroup><OutputType>Exe</OutputType><TargetFramework>net6.0</TargetFramework><RootNamespace>yolov5_det</RootNamespace><ImplicitUsings>enable</ImplicitUsings><Nullable>enable</Nullable></PropertyGroup><ItemGroup><PackageReference Include="OpenCvSharp4" Version="4.9.0.20240103" /><PackageReference Include="OpenCvSharp4.Extensions" Version="4.9.0.20240103" /><PackageReference Include="OpenCvSharp4.runtime.osx_arm64" Version="4.8.1-rc" /><PackageReference Include="OpenVINO.CSharp.API" Version="2023.2.0.4" /><PackageReference Include="OpenVINO.CSharp.API.Extensions" Version="1.0.1" /><PackageReference Include="OpenVINO.CSharp.API.Extensions.OpenCvSharp" Version="1.0.4" /><PackageReference Include="OpenVINO.runtime.macos-arm64" Version="2023.3.0.1" /></ItemGroup></Project>
3.3 定义预测方法
(1) 使用常规方式部署模型
Yolov5 属于比较经典单阶段目标检测模型,其模型输入为640*640的归一化处理后的图像数据,输出为未进行NMS的推理结果,因此在获取推理结果后,需要进行NMS,其实现代码如下所示:
static void yolov5_det(string model_path, string image_path, string device)
{// -------- Step 1. Initialize OpenVINO Runtime Core --------Core core = new Core();// -------- Step 2. Read inference model --------Model model = core.read_model(model_path);OvExtensions.printf_model_info(model);// -------- Step 3. Loading a model to the device --------start = DateTime.Now;CompiledModel compiled_model = core.compile_model(model, device);// -------- Step 4. Create an infer request --------InferRequest infer_request = compiled_model.create_infer_request();// -------- Step 5. Process input images --------Mat image = new Mat(image_path); // Read image by opencvsharpint max_image_length = image.Cols > image.Rows ? image.Cols : image.Rows;Mat max_image = Mat.Zeros(new OpenCvSharp.Size(max_image_length, max_image_length), MatType.CV_8UC3);Rect roi = new Rect(0, 0, image.Cols, image.Rows);image.CopyTo(new Mat(max_image, roi));float factor = (float)(max_image_length / 640.0);// -------- Step 6. Set up input data --------Tensor input_tensor = infer_request.get_input_tensor();Shape input_shape = input_tensor.get_shape();Mat input_mat = CvDnn.BlobFromImage(max_image, 1.0 / 255.0, new OpenCvSharp.Size(input_shape[2], input_shape[3]), 0, true, false);float[] input_data = new float[input_shape[1] * input_shape[2] * input_shape[3]];Marshal.Copy(input_mat.Ptr(0), input_data, 0, input_data.Length);input_tensor.set_data<float>(input_data);// -------- Step 7. Do inference synchronously --------infer_request.infer();// -------- Step 8. Get infer result data --------Tensor output_tensor = infer_request.get_output_tensor();int output_length = (int)output_tensor.get_size();float[] output_data = output_tensor.get_data<float>(output_length);// -------- Step 9. Process reault --------Mat result_data = new Mat(25200, 85, MatType.CV_32F, output_data);// Storage results listList<Rect> position_boxes = new List<Rect>();List<int> class_ids = new List<int>();List<float> confidences = new List<float>();// Preprocessing output resultsfor (int i = 0; i < result_data.Rows; i++){float confidence = result_data.At<float>(i, 4);if (confidence < 0.5){continue;}Mat classes_scores = new Mat(result_data, new Rect(5, i, 80, 1));OpenCvSharp.Point max_classId_point, min_classId_point;double max_score, min_score;// Obtain the maximum value and its position in a set of dataCv2.MinMaxLoc(classes_scores, out min_score, out max_score,out min_classId_point, out max_classId_point);// Confidence level between 0 ~ 1// Obtain identification box informationif (max_score > 0.25){float cx = result_data.At<float>(i, 0);float cy = result_data.At<float>(i, 1);float ow = result_data.At<float>(i, 2);float oh = result_data.At<float>(i, 3);int x = (int)((cx - 0.5 * ow) * factor);int y = (int)((cy - 0.5 * oh) * factor);int width = (int)(ow * factor);int height = (int)(oh * factor);Rect box = new Rect();box.X = x;box.Y = y;box.Width = width;box.Height = height;position_boxes.Add(box);class_ids.Add(max_classId_point.X);confidences.Add((float)confidence);}}// NMS non maximum suppressionint[] indexes = new int[position_boxes.Count];CvDnn.NMSBoxes(position_boxes, confidences, 0.5f, 0.5f, out indexes);for (int i = 0; i < indexes.Length; i++){int index = indexes[i];Cv2.Rectangle(image, position_boxes[index], new Scalar(0, 0, 255), 2, LineTypes.Link8);Cv2.Rectangle(image, new OpenCvSharp.Point(position_boxes[index].TopLeft.X, position_boxes[index].TopLeft.Y + 30),new OpenCvSharp.Point(position_boxes[index].BottomRight.X, position_boxes[index].TopLeft.Y), new Scalar(0, 255, 255), -1);Cv2.PutText(image, class_ids[index] + "-" + confidences[index].ToString("0.00"),new OpenCvSharp.Point(position_boxes[index].X, position_boxes[index].Y + 25),HersheyFonts.HersheySimplex, 0.8, new Scalar(0, 0, 0), 2);}string output_path = Path.Combine(Path.GetDirectoryName(Path.GetFullPath(image_path)),Path.GetFileNameWithoutExtension(image_path) + "_result.jpg");Cv2.ImWrite(output_path, image);Slog.INFO("The result save to " + output_path);Cv2.ImShow("Result", image);Cv2.WaitKey(0);
}
(2) 使用模型结构处理处理数据
目前 OpenVINO™ 已经支持在模型结构中增加数据的前后处理流程,并且在 OpenVINO™ C# API 中也已经实现了该功能接口,所以在此处演示了如何将模型输入数据处理流程封装到模型中,通过 OpenVINO™ 进行数据处理的加速处理,如下面代码所示:
static void yolov5_det_with_process(string model_path, string image_path, string device)
{······// -------- Step 2. Read inference model --------start = DateTime.Now;Model model = core.read_model(model_path);OvExtensions.printf_model_info(model);PrePostProcessor processor = new PrePostProcessor(model);Tensor input_tensor_pro = new Tensor(new OvType(ElementType.U8), new Shape(1, 640, 640, 3));InputInfo input_info = processor.input(0);InputTensorInfo input_tensor_info = input_info.tensor();input_tensor_info.set_from(input_tensor_pro).set_layout(new Layout("NHWC")).set_color_format(ColorFormat.BGR);PreProcessSteps process_steps = input_info.preprocess();process_steps.convert_color(ColorFormat.RGB).resize(ResizeAlgorithm.RESIZE_LINEAR).convert_element_type(new OvType(ElementType.F32)).scale(255.0f).convert_layout(new Layout("NCHW"));Model new_model = processor.build();// -------- Step 3. Loading a model to the device --------CompiledModel compiled_model = core.compile_model(new_model, device);// -------- Step 4. Create an infer request --------InferRequest infer_request = compiled_model.create_infer_request();// -------- Step 5. Process input images --------Mat image = new Mat(image_path); // Read image by opencvsharpint max_image_length = image.Cols > image.Rows ? image.Cols : image.Rows;Mat max_image = Mat.Zeros(new OpenCvSharp.Size(max_image_length, max_image_length), MatType.CV_8UC3);Rect roi = new Rect(0, 0, image.Cols, image.Rows);image.CopyTo(new Mat(max_image, roi));Cv2.Resize(max_image, max_image, new OpenCvSharp.Size(640, 640));float factor = (float)(max_image_length / 640.0);// -------- Step 6. Set up input data --------Tensor input_tensor = infer_request.get_input_tensor();Shape input_shape = input_tensor.get_shape();byte[] input_data = new byte[input_shape[1] * input_shape[2] * input_shape[3]];Marshal.Copy(max_image.Ptr(0), input_data, 0, input_data.Length);IntPtr destination = input_tensor.data();Marshal.Copy(input_data, 0, destination, input_data.Length);// -------- Step 7. Do inference synchronously --------······
}
由于目前还没有完全实现所有的 OpenVINO™ 的预处理接口,因此只能实现部分预处理过程封装到模型中,此处主要是做了以下处理:
- 数据类型转换:byte->float
- 数据维度转换:NHWC->NCHW
- 图像色彩空间转换:BGR->RGB
- 数据归一化处理:[0,1]->[0,255]
因此将一些数据处理流程封装到模型中后,在进行模型推理时,只需要将读取到的图片数据Resize为640*640后,就可以直接将数据加载到模型即可。
(3) 使用 OpenVINO™ C# API 封装的接口
YOLOv5 是当前工业领域十分流行的目标检测模型,因此在封装 OpenVINO™ C# API 时,提供了快速部署 Yolov5 模型的接口,实现代码如下所示:
static void yolov5_det_using_extensions(string model_path, string image_path, string device)
{Yolov5DetConfig config = new Yolov5DetConfig();config.set_model(model_path);Yolov5Det yolov8 = new Yolov5Det(config);Mat image = Cv2.ImRead(image_path);DetResult result = yolov8.predict(image);Mat result_im = Visualize.draw_det_result(result, image);Cv2.ImShow("Result", result_im);Cv2.WaitKey(0);
}
3.4 预测方法调用
定义好上述方法后,便可以直接在主函数中调用该方法,只需要在主函数中增加以下代码即可:
yolov5_det("yolov5s.xml", "test_image.png", "AUTO");
yolov5_det_with_process("yolov5s.xml", "test_image.png", "AUTO");
yolov5_det_using_extensions("yolov5s.xml", "test_image.png", "AUTO");
如果开发者自己没有进行模型下载与转换,又同时想快速体验该项目,我此处提供了在线的转换后的模型以及带预测图片,开发者可以直接在主函数中增加以下代码,便可以直接自动下载模型以及推理数据,并调用推理方法,实现程序直接运行。
static void Main(string[] args)
{string model_path = "";string image_path = "";string device = "AUTO";if (args.Length == 0){if (!Directory.Exists("./model")){Directory.CreateDirectory("./model");}if (!File.Exists("./model/yolov5s.bin") && !File.Exists("./model/yolov5s.bin")){if (!File.Exists("./model/yolov5s.tar")){_ = Download.download_file_async("https://github.com/guojin-yan/OpenVINO-CSharp-API-Samples/releases/download/Model/yolov5s.tar","./model/yolov5s.tar").Result;}Download.unzip("./model/yolov585s.tar", "./model/");}if (!File.Exists("./model/test_image.jpg")){_ = Download.download_file_async("https://github.com/guojin-yan/OpenVINO-CSharp-API-Samples/releases/download/Image/test_det_02.jpg","./model/test_image.jpg").Result;}model_path = "./model/yolov5s.xml";image_path = "./model/test_image.jpg";}else if (args.Length >= 2){model_path = args[0];image_path = args[1];device = args[2];}else{Console.WriteLine("Please enter the correct command parameters, for example:");Console.WriteLine("> 1. dotnet run");Console.WriteLine("> 2. dotnet run <model path> <image path> <device name>");}// -------- Get OpenVINO runtime version --------OpenVinoSharp.Version version = Ov.get_openvino_version();Slog.INFO("---- OpenVINO INFO----");Slog.INFO("Description : " + version.description);Slog.INFO("Build number: " + version.buildNumber);Slog.INFO("Predict model files: " + model_path);Slog.INFO("Predict image files: " + image_path);Slog.INFO("Inference device: " + device);Slog.INFO("Start yolov8 model inference.");yolov5_det(model_path, image_path, device);//yolov5_det_with_process(model_path, image_path, device);//yolov5_det_using_extensions(model_path, image_path, device);
}
为了减少文章篇幅,所以此处只提供了有差异的代码,如果想获取完整代码,请访问GitHub代码仓库,获取项目源码,链接为:
https://github.com/guojin-yan/OpenVINO-CSharp-API-Samples/tree/master/model_samples/yolov5/yolov5_det_opencvsharp
4. Yolov5 DET 项目配置(Emgu.CV 版)
同样地,为了满足Emgu.CV开发者的需求,此处同样地提供了Emgu.CV版本的Yolov5的模型部署代码以及使用流程,此处为了简化文章内容,对于和上文重复的步骤不在进行展开讲述。
4.1 添加项目依赖
首先是安装OpenVINO™ C# API项目依赖,在命令行中输入以下指令即可:
dotnet add package OpenVINO.CSharp.API
dotnet add package OpenVINO.runtime.macos-arm64
dotnet add package OpenVINO.CSharp.API.Extensions
dotnet add package OpenVINO.CSharp.API.Extensions.EmguCV
接下来安装使用到的图像处理库 Emgu.CV,在命令行中输入以下指令即可:
dotnet add package Emgu.CV
dotnet add package Emgu.CV.runtime.mini.macos
关于在MacOS上搭建 OpenCvSharp 开发环境请参考以下文章: 【OpenCV】在MacOS上使用Emgu.CV
添加完成项目依赖后,项目的配置文件如下所示:
<Project Sdk="Microsoft.NET.Sdk"><PropertyGroup><OutputType>Exe</OutputType><TargetFramework>net6.0</TargetFramework><RootNamespace>yolov5_det</RootNamespace><ImplicitUsings>enable</ImplicitUsings><Nullable>enable</Nullable></PropertyGroup><ItemGroup><PackageReference Include="Emgu.CV" Version="4.8.1.5350" /><PackageReference Include="Emgu.CV.runtime.mini.macos" Version="4.8.1.5350" /><PackageReference Include="OpenVINO.CSharp.API" Version="2023.2.0.4" /><PackageReference Include="OpenVINO.CSharp.API.Extensions" Version="1.0.1" /><PackageReference Include="OpenVINO.CSharp.API.Extensions.EmguCV" Version="1.0.4.1" /><PackageReference Include="OpenVINO.runtime.macos-arm64" Version="2023.3.0.1" /></ItemGroup></Project>
4.2 定义预测方法
模型部署流程与上一节中使用OpenCvSharp的基本一致,主要是替换了图像处理的工具,同时提供了如上一节中所展示的三种部署方式。此处为了减少文章篇幅,此处不在展示详细的部署代码,如果想获取相关代码,请访问项目GitHub,下载所有的测试代码,项目链接为:
https://github.com/guojin-yan/OpenVINO-CSharp-API-Samples/tree/master/model_samples/yolov5/yolov5_det_emgucv
5. 项目运行与演示
5.1 项目编译
接下来输入项目编译指令进行项目编译,输入以下指令即可:
dotnet build
程序编译后输出为:
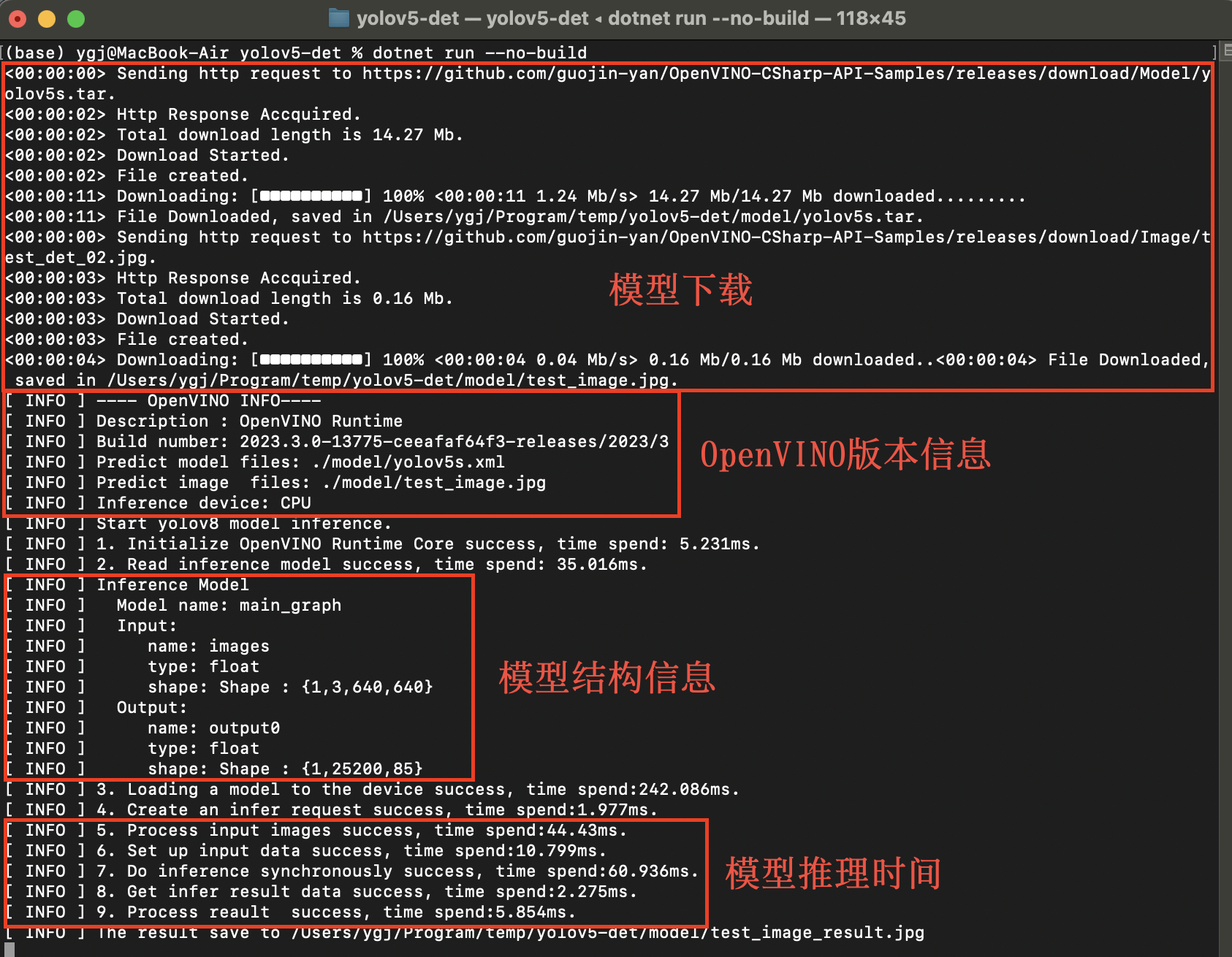
接下来运行编译后的程序文件,在CMD中输入以下指令,运行编译后的项目文件:
dotnet run --no-build
运行后项目输出为:
6. 总结
在该项目中,我们结合之前开发的 OpenVINO C# API 项目部署YOLOv5模型,成功实现了对象目标检测,并且根据不同开发者的使用习惯,同时提供了OpenCvSharp以及Emgu.CV两种版本,供各位开发者使用。最后如果各位开发者在使用中有任何问题,欢迎大家与我联系。

相关文章:
【OpenVINO™】在 MacOS 上使用 OpenVINO™ C# API 部署 Yolov5 (下篇)
在 MacOS 上使用 OpenVINO™ C# API 部署 Yolov5 (下篇) 项目介绍 YOLOv5 是革命性的 "单阶段"对象检测模型的第五次迭代,旨在实时提供高速、高精度的结果,是世界上最受欢迎的视觉人工智能模型,代表了Ult…...

使用CHATGPT进行论文写作的缺点和风险
为了真正感受 ChatGPT 的写作潜力,让我们先将其与传统的论文写作方法进行一下比较分析 CHATGPT论文写作的缺点和风险 传统论文写作的考验和磨难很深:费力的研究、组织想法和精心设计的逻辑论证,往往以牺牲你的理智为代价。 进入ChatGPT&am…...
,穿梭在不同的Gradle文件中(kotlin脚本版))
【Android-Gradle】多模块开发中,定义额外属性(全局变量),穿梭在不同的Gradle文件中(kotlin脚本版)
其他信息可以参考官网:https://docs.gradle.org/current/dsl/org.gradle.api.plugins.ExtraPropertiesExtension.html#org.gradle.api.plugins.ExtraPropertiesExtension 但是本文讲一些简单应用: 需求1:根目录gradle文件定义一个全局变量 …...
React18原理: Fiber架构下的单线程CPU调度策略
概述 React 的 Fiber 架构, 它的整个设计思想就是去参考CPU的调度策略CPU现在都是多核多进程的,重点研究的是 CPU是单核单线程,它是如何调度的?为什么要去研究单线程的CPU? 浏览器中的JS它是单线程的JS 的执行线程和浏览器的渲染GUI 是互斥…...

个人搜集的gstreamer学习链接
gstreamer资源: GStreamer: 官方英文官网 GStreamer C开发教程 (gstreamer安装包下载目录) GStreamer GitLab源码 gstreamer 插件列表) gstreamer官方文档: https://gstreamer.freedesktop.org/documentation/tutorials/index.html?gi-languagec …...

Blazor Wasm Gitee 码云登录
目录: OpenID 与 OAuth2 基础知识Blazor wasm Google 登录Blazor wasm Gitee 码云登录Blazor SSR/WASM IDS/OIDC 单点登录授权实例1-建立和配置IDS身份验证服务Blazor SSR/WASM IDS/OIDC 单点登录授权实例2-登录信息组件wasmBlazor SSR/WASM IDS/OIDC 单点登录授权实例3-服务端…...

Android 自定义BaseActivity
直接上代码: BaseActivity代码: package com.example.custom.activity;import android.annotation.SuppressLint; import android.app.Activity; import android.content.pm.ActivityInfo; import android.os.Bundle; import android.os.Looper; impor…...

基于鲲鹏服务器的LNMP配置
基于鲲鹏服务器的LNMP配置 系统 Centos8 # cat /etc/redhat-release CentOS Linux release 8.0.1905 (Core) 卸载已经存在的旧版本的安装包 # rpm -qa | grep php #查看已经安装的PHP旧版本# rpm -qa | grep php | xargs rpm -e #卸载已经安装的旧版,如果提示有…...
 练习题)
MIT-Missing Semester_Topic 6:Version Control (Git) 练习题
文章目录 练习一练习二练习三练习四练习五练习六练习七 练习一 若还没有 Git 的相关经验,阅读 Pro Git 的前几章或诸如 Learn Git Branching 的相关教程,并在学习的同时从 Git 的数据模型(data model)的角度思考各 Git 命令。 老师…...

OpenHarmony轻量级内核-LiteOS-M
OpenHarmony轻量级内核 思维导图 https://download.csdn.net/download/lanlingxueyu/88816723 概述 内核是一人操作系统的运算核心,决定着系统的性能和稳定性。它是基于硬件的第一层软件扩充,提供操作系统的基本功能,是操作系统工作的基础。它负责管理系统的进程、内存、…...

TCP 传输控制协议——详细
目录 1 TCP 1.1 TCP 最主要的特点 1.2 TCP 的连接 TCP 连接,IP 地址,套接字 1.3 可靠传输的工作原理 1.3.1 停止等待协议 (1)无差错情况 (2)出现差错 (3)确认丢失和确认迟到…...
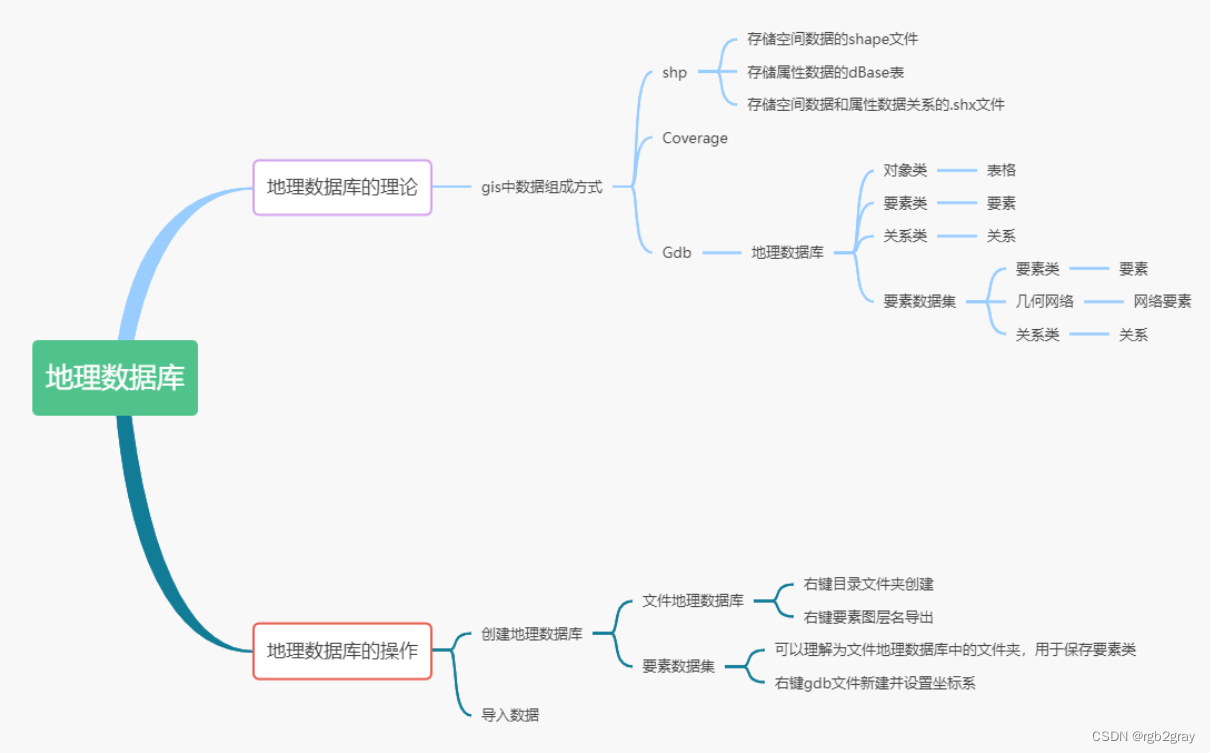
ArcGIS学习(六)地理数据库
ArcGIS学习(六)地理数据库 上个任务我们讲了一个非常重要的知识点一一坐标系。这个任务我们带来另外一个很重要的知识点一一地理数据库。 地理数据库的内容相比于坐标系简单很多! 首先,先让我们来学习下地理数据库的理论。 ArcGIS 中的地理数据库(Geodatabase)是一个用…...
——哈希算法)
保研机试算法训练个人记录笔记(四)——哈希算法
目录 两数之和 字母异位词分组 最长连续序列 力扣热题100——哈希算法 两数之和 给定一个整数数组 nums 和一个整数目标值 target,请你在该数组中找出 和为目标值 target 的那 两个 整数,并返回它们的数组下标。 你可以假设每种输入只会对应一个答…...
 打造AI编程助手 Code Copilot)
ChatGPT实战100例 - (14) 打造AI编程助手 Code Copilot
文章目录 ChatGPT实战100例 - (14) 打造AI编程助手 Code Copilot一、Code Copilot AI编程助手二、制作代码生成器2.1 定义生成器框架2.2 从现有代码提取代码模板三、进行代码优化ChatGPT实战100例 - (14) 打造AI编程助手 Code Copilot 一、Code Copilot AI编程助手 Code Copi…...

表单标记(html)
前言 发现input的type属性还是有挺多的,这里把一些常用的总结一下。 HTML 输入类型 (w3school.com.cn)https://www.w3school.com.cn/html/html_form_input_types.asp text-文本 文本输入,如果文字太长,超出的部分就不会显示。 定义供文本输入的单行…...
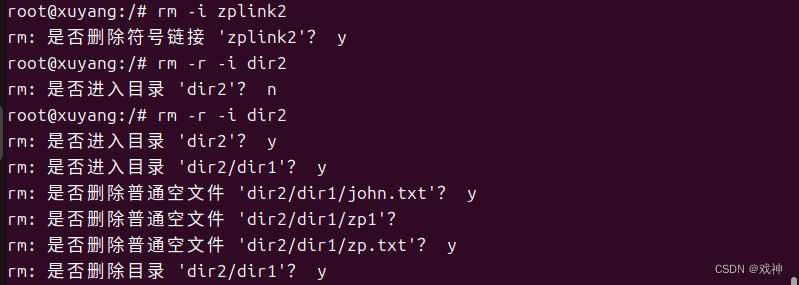
Linux文件和目录管理
目录基础 Linux操作系统以目录的方式来组织和管理系统中的所有文件。所谓的目录,就是将所有文件的说明信息采用树状结构组织起来。每个目录节点之下会有文件和子目录。 所有一切都从 ‘根’ 开始,用 ‘/’ 代表, 并且延伸到子目录。 bin:B…...

【go】gorm\xorm\ent事务处理
文章目录 1 gorm1.1 开启事务1.2 执行操作1.3 提交或回滚 2 xorm2.1 开启事务2.2 执行操作2.3 提交或回滚 3 ent3.1 开启事务3.2 执行操作3.3 提交或回滚 前言:本文介绍golang三种orm框架对数据库事务的操作 1 gorm Begin开启事务 tx *gorm.DB 1.1 开启事务 tx :…...

【数据分享】1929-2023年全球站点的逐月平均风速(Shp\Excel\免费获取)
气象数据是在各项研究中都经常使用的数据,气象指标包括气温、风速、降水、能见度等指标,说到气象数据,最详细的气象数据是具体到气象监测站点的数据! 有关气象指标的监测站点数据,之前我们分享过1929-2023年全球气象站…...

IP地址详解
IP地址是互联网协议(Internet Protocol)用于标识并定位网络中主机(如计算机、服务器、路由器等)的一串数字。它是一个32位的二进制数,通常以四个数字(每个数字范围为0-255)的形式显示࿰…...
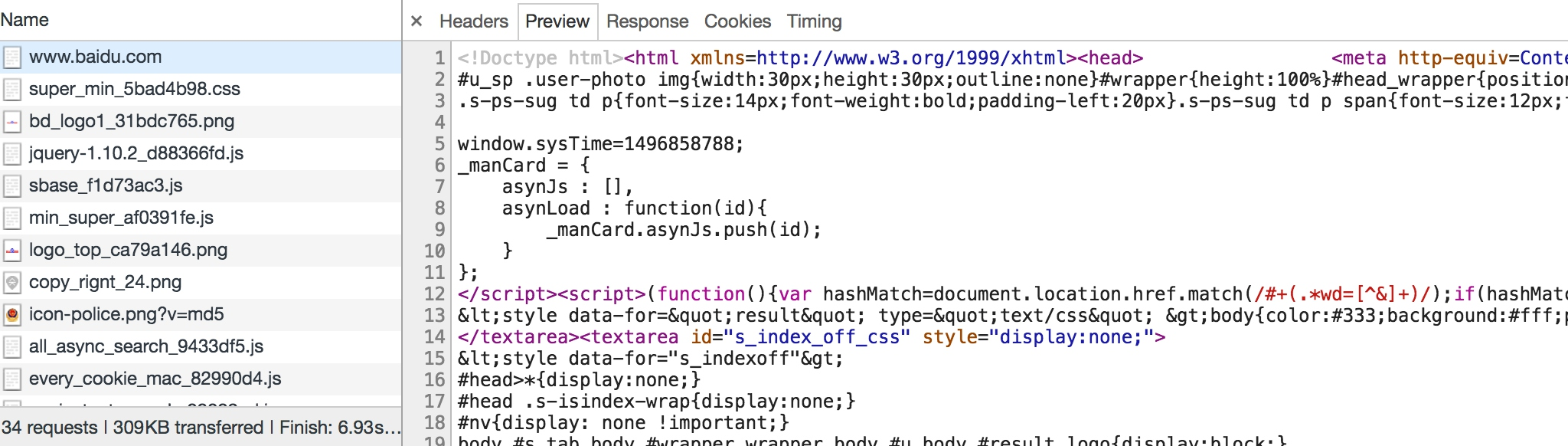
Python爬虫http基本原理#2
Python爬虫逆向系列(更新中):http://t.csdnimg.cn/5gvI3 HTTP 基本原理 在本节中,我们会详细了解 HTTP 的基本原理,了解在浏览器中敲入 URL 到获取网页内容之间发生了什么。了解了这些内容,有助于我们进一…...

[STM32U3] 【STM32U385RG 测评】PWM调节屏幕亮度
在评测计划中有使用pwm来实现调节屏幕亮度,因此本篇为如何使用HMI实现对屏的亮度调节。实现原理为,使用TouchGFX Designer添加一个滑动控件,通过滑动来修改pwm的占空比,实现ST7789的BLK的电压实现。 本次工程在上一篇试用的基础上…...

深入MPSOC缓存一致性:从零配置HPC接口,让你的PL加速器告别Cache Flush
深入MPSOC缓存一致性:从零配置HPC接口,让你的PL加速器告别Cache Flush 在异构计算领域,MPSOC平台的缓存一致性配置一直是工程师面临的棘手问题。当PL端加速器通过HP接口与PS端交互时,频繁的手动缓存维护不仅增加了软件复杂度&…...

避坑指南:ArcGIS提取的DEM高程点,为什么在Global Mapper里显示为平面?
跨平台高程数据互操作:解决ArcGIS与Global Mapper的字段兼容性问题 当你第一次将ArcGIS中精心提取的DEM高程点导入Global Mapper,期待看到起伏的地形时,却发现所有点都平铺在一个平面上——这种挫败感我深有体会。这不是软件故障,…...
)
STM32F4实战:手把手教你用DCMI接口驱动OV2640摄像头(附完整代码)
STM32F4实战:从零构建OV2640摄像头驱动系统 1. 硬件连接与信号解析 OV2640摄像头模块与STM32F4的硬件连接需要同时处理电源、控制信号和数据传输三个子系统。我们先拆解这个200万像素摄像头的物理接口特性: 电源部分需要特别注意电压匹配: 核…...

蓝桥杯嵌入式模拟赛2实战复盘:用STM32G431搞定LCD、LED、按键、PWM和串口
蓝桥杯嵌入式模拟赛2全流程实战解析:从零构建STM32G431多模块协同系统 当开发板的电源指示灯第一次亮起,LCD屏幕浮现出清晰的白色字符时,我知道这不仅仅是一次普通的练习——这是将分散的模块知识整合成完整系统的关键时刻。蓝桥杯嵌入式模拟…...
)
告别ActiveX!用WebSocket+JavaScript在Chrome/Firefox里直接调用扫描仪(附完整代码)
现代浏览器无插件扫描方案:WebSocket与JavaScript的完美结合 曾几何时,企业办公系统中扫描文档需要依赖特定的浏览器和插件。如今,随着技术演进,我们终于可以摆脱ActiveX和NPAPI的束缚,在Chrome、Firefox等现代浏览器中…...

手把手教你搞定KEIL4.74社区版激活:从注册到填问卷拿License的全流程避坑
KEIL 4.74社区版激活全流程实战指南:从零开始到成功获取License的完整攻略 作为一名嵌入式开发新手,第一次接触KEIL这个强大的开发环境时,难免会被其复杂的激活流程搞得晕头转向。特别是社区版的KEIL 4.74,虽然免费,但…...

加密货币交易的AI革命:awesome-deep-trading中的区块链量化策略终极指南 [特殊字符]
加密货币交易的AI革命:awesome-deep-trading中的区块链量化策略终极指南 🚀 【免费下载链接】awesome-deep-trading List of awesome resources for machine learning-based algorithmic trading 项目地址: https://gitcode.com/gh_mirrors/aw/awesome…...

告别机械音!用‘小蜗语音工具1.9’制作有声小说和视频字幕的保姆级教程
告别机械音!用‘小蜗语音工具1.9’制作有声小说和视频字幕的保姆级教程 在内容创作爆炸的时代,有声小说和视频字幕已成为吸引用户注意力的关键。然而,传统语音合成工具常因生硬的机械音、单调的语调让作品失去灵魂。小蜗语音工具1.9的多角色对…...

《CVPR2025-DEIM创新改进项目实战:从原理到部署的深度学习优化全攻略》004、DEIM数学基础:注意力机制与特征重标定的统一框架
CVPR2025-DEIM创新改进项目实战:从原理到部署的深度学习优化全攻略 004、DEIM数学基础:注意力机制与特征重标定的统一框架 一、从一次诡异的梯度爆炸说起 去年秋天调一个轻量级检测模型,在T4上跑得好好的,换到Jetson Orin上就炸了——loss直接飞到NaN。查了三天,最后定…...