STM32Cubmax stm32f103zet6 SPI通讯
一、基本概念
SPI 是英语 Serial Peripheral interface 的缩写,顾名思义就是串行外围设备接口。是 Motorola
首先在其 MC68HCXX 系列处理器上定义的。 SPI 接口主要应用在 EEPROM, FLASH,实时时
钟, AD 转换器,还有数字信号处理器和数字信号解码器之间。 SPI,是一种高速的,全双工,
同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为 PCB 的布局
上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信
协议, STM32 也有 SPI 接口。 下面我们看看 SPI 的内部简明图(图 28.1.1):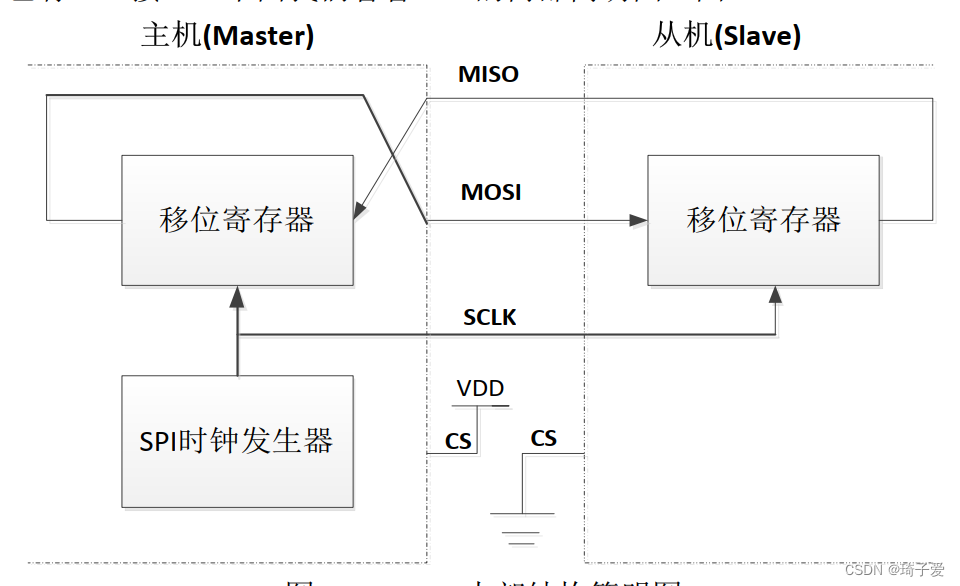
SPI 接口一般使用 4 条线通信:
MISO 主设备数据输入,从设备数据输出。
MOSI 主设备数据输出,从设备数据输入。
SCLK 时钟信号,由主设备产生。
CS 从设备片选信号,由主设备控制。
从图中可以看出, 主机和从机都有一个串行移位寄存器,主机通过向它的 SPI 串行寄存器
写入一个字节来发起一次传输。寄存器通过 MOSI 信号线将字节传送给从机,从机也将自己的
移位寄存器中的内容通过 MISO 信号线返回给主机。这样,两个移位寄存器中的内容就被交换。
外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,
若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。
SPI 主要特点有: 可以同时发出和接收串行数据; 可以当作主机或从机工作; 提供频率可
编程时钟; 发送结束中断标志; 写冲突保护; 总线竞争保护等。
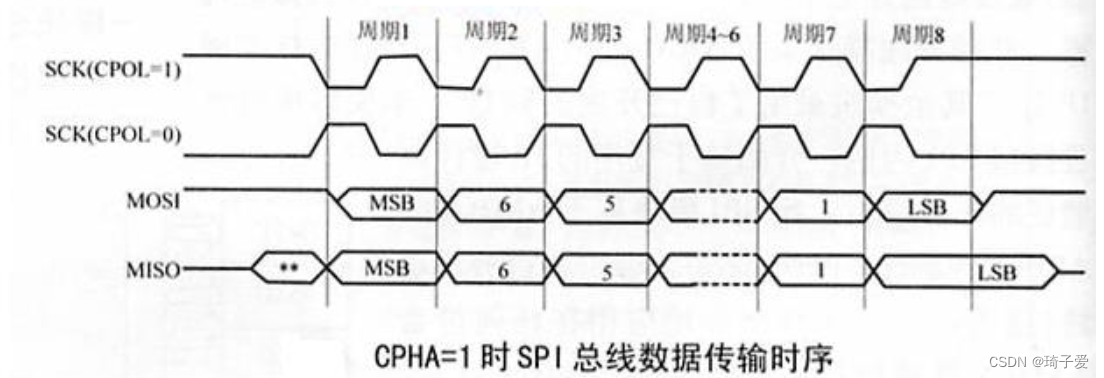
SPI 总线四种工作方式 SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串
行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果
CPOL=0,串行同步时钟的空闲状态为低电平;如果 CPOL=1,串行同步时钟的空闲状态为高电
平。时钟相位( CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果
CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果 CPHA=1,在串
行同步时钟的第二个跳变沿(上升或下降)数据被采样。 SPI 主模块和与之通信的外设备时钟
相位和极性应该一致。

二、代码实现

w25qxx.c
#include "w25qxx.h"
#include "main.h"
#include "delay.h"
#include "stm32f1xx_hal.h"
uint16_t W25QXX_TYPE=W25Q128;//默认是W25Q128
//4Kbytes为一个Sector
//16个扇区为1个Block
//W25Q128
//容量为16M字节,共有128个Block,4096个Sector
//SPI2总线读写一个字节
//参数是写入的字节,返回值是读出的字节
uint8_t SPI2_ReadWriteByte(uint8_t TxData)
{uint8_t Rxdata;//定义一个变量RxdataHAL_SPI_TransmitReceive(&hspi2,&TxData,&Rxdata,1,1000);//调用固件库函数收发数据return Rxdata;//返回收到的数据
}
void W25QXX_CS(uint8_t a)//软件控制函数(0为低电平,其他值为高电平)
{if(a==0)HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET);else HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET);
}
//初始化SPI FLASH的IO口
uint8_t W25QXX_Init(void)
{uint8_t temp;//定义一个变量tempW25QXX_CS(1);//0片选开启,1片选关闭W25QXX_TYPE = W25QXX_ReadID();//读取FLASH ID.if(W25QXX_TYPE == W25Q256)//SPI FLASH为W25Q256时才用设置为4字节地址模式{temp = W25QXX_ReadSR(3);//读取状态寄存器3,判断地址模式if((temp&0x01)==0)//如果不是4字节地址模式,则进入4字节地址模式{W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(W25X_Enable4ByteAddr);//发送进入4字节地址模式指令W25QXX_CS(1);//0片选开启,1片选关闭}}if(W25QXX_TYPE==W25Q256||W25QXX_TYPE==W25Q128||W25QXX_TYPE==W25Q64||W25QXX_TYPE==W25Q32||W25QXX_TYPE==W25Q16||W25QXX_TYPE==W25Q80)return 0; else return 1;//如果读出ID是现有型号列表中的一个,则识别芯片成功!
}
//读取W25QXX的状态寄存器,W25QXX一共有3个状态寄存器
//状态寄存器1:
//BIT7 6 5 4 3 2 1 0
//SPR RV TB BP2 BP1 BP0 WEL BUSY
//SPR:默认0,状态寄存器保护位,配合WP使用
//TB,BP2,BP1,BP0:FLASH区域写保护设置
//WEL:写使能锁定
//BUSY:忙标记位(1,忙;0,空闲)
//默认:0x00
//状态寄存器2:
//BIT7 6 5 4 3 2 1 0
//SUS CMP LB3 LB2 LB1 (R) QE SRP1
//状态寄存器3:
//BIT7 6 5 4 3 2 1 0
//HOLD/RST DRV1 DRV0 (R) (R) WPS (R) (R)
//regno:状态寄存器号,范:1~3
//返回值:状态寄存器值
uint8_t W25QXX_ReadSR(uint8_t regno)
{uint8_t byte=0,command=0;switch(regno){case 1:command=W25X_ReadStatusReg1;//读状态寄存器1指令break;case 2:command=W25X_ReadStatusReg2;//读状态寄存器2指令break;case 3:command=W25X_ReadStatusReg3;//读状态寄存器3指令break;default:command=W25X_ReadStatusReg1;//读状态寄存器1指令break;}W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(command);//发送读取状态寄存器命令byte=SPI2_ReadWriteByte(0Xff);//读取一个字节W25QXX_CS(1);//0片选开启,1片选关闭return byte;//返回变量byte
}
//写W25QXX状态寄存器
void W25QXX_Write_SR(uint8_t regno,uint8_t sr)
{uint8_t command=0;switch(regno){case 1:command=W25X_WriteStatusReg1;//写状态寄存器1指令break;case 2:command=W25X_WriteStatusReg2;//写状态寄存器2指令break;case 3:command=W25X_WriteStatusReg3;//写状态寄存器3指令break;default:command=W25X_WriteStatusReg1;break;}W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(command);//发送写取状态寄存器命令SPI2_ReadWriteByte(sr);//写入一个字节W25QXX_CS(1);//0片选开启,1片选关闭
}
//W25QXX写使能
//将WEL置位
void W25QXX_Write_Enable(void)
{W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(W25X_WriteEnable);//发送写使能W25QXX_CS(1);//0片选开启,1片选关闭
}
//W25QXX写禁止
//将WEL清零
void W25QXX_Write_Disable(void)
{W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(W25X_WriteDisable);//发送写禁止指令W25QXX_CS(1);//0片选开启,1片选关闭
}
//读取芯片ID
//高8位是厂商代号(本程序不判断厂商代号)
//低8位是容量大小
//0XEF13型号为W25Q80
//0XEF14型号为W25Q16
//0XEF15型号为W25Q32
//0XEF16型号为W25Q64
//0XEF17型号为W25Q128(目前洋桃2号开发板使用128容量芯片)
//0XEF18型号为W25Q256
uint16_t W25QXX_ReadID(void)
{uint16_t Temp = 0;W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(0x90);//发送读取ID命令SPI2_ReadWriteByte(0x00);SPI2_ReadWriteByte(0x00);SPI2_ReadWriteByte(0x00);Temp|=SPI2_ReadWriteByte(0xFF)<<8;Temp|=SPI2_ReadWriteByte(0xFF);W25QXX_CS(1);//0片选开启,1片选关闭return Temp;
}
//读取SPI FLASH
//在指定地址开始读取指定长度的数据
//pBuffer:数据存储区
//ReadAddr:开始读取的地址(24bit)
//NumByteToRead:要读取的字节数(最大65535)
void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead)
{uint16_t i;W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(W25X_ReadData);//发送读取命令if(W25QXX_TYPE==W25Q256)//如果是W25Q256的话地址为4字节的,要发送最高8位{SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>24));}SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>16));//发送24bit地址SPI2_ReadWriteByte((uint8_t)((ReadAddr)>>8));SPI2_ReadWriteByte((uint8_t)ReadAddr);for(i=0;i<NumByteToRead;i++){pBuffer[i]=SPI2_ReadWriteByte(0XFF);//循环读数}W25QXX_CS(1);//0片选开启,1片选关闭
}
//SPI在一页(0~65535)内写入少于256个字节的数据
//在指定地址开始写入最大256字节的数据
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大256),该数不应该超过该页的剩余字节数!!!
void W25QXX_Write_Page(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{uint16_t i;W25QXX_Write_Enable();//SET WELW25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(W25X_PageProgram);//发送写页命令if(W25QXX_TYPE==W25Q256)//如果是W25Q256的话地址为4字节的,要发送最高8位{SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>24));}SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>16));//发送24bit地址SPI2_ReadWriteByte((uint8_t)((WriteAddr)>>8));SPI2_ReadWriteByte((uint8_t)WriteAddr);for(i=0;i<NumByteToWrite;i++)SPI2_ReadWriteByte(pBuffer[i]);//循环写数W25QXX_CS(1);//0片选开启,1片选关闭W25QXX_Wait_Busy();//等待写入结束
}
//无检验写SPI FLASH
//必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败!
//具有自动换页功能
//在指定地址开始写入指定长度的数据,但是要确保地址不越界!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
//CHECK OK
void W25QXX_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{uint16_t pageremain;pageremain=256-WriteAddr%256; //单页剩余的字节数if(NumByteToWrite<=pageremain)pageremain=NumByteToWrite;//不大于256个字节while(1){W25QXX_Write_Page(pBuffer,WriteAddr,pageremain);if(NumByteToWrite==pageremain)break;//写入结束了else //NumByteToWrite>pageremain{pBuffer+=pageremain;WriteAddr+=pageremain;NumByteToWrite-=pageremain; //减去已经写入了的字节数if(NumByteToWrite>256)pageremain=256; //一次可以写入256个字节else pageremain=NumByteToWrite; //不够256个字节了}};
}
//写SPI FLASH
//在指定地址开始写入指定长度的数据
//该函数带擦除操作!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
uint8_t W25QXX_BUFFER[4096];
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite)
{uint32_t secpos;uint16_t secoff;uint16_t secremain;uint16_t i;uint8_t* W25QXX_BUF;W25QXX_BUF=W25QXX_BUFFER;secpos=WriteAddr/4096;//扇区地址secoff=WriteAddr%4096;//在扇区内的偏移secremain=4096-secoff;//扇区剩余空间大小//printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//测试用if(NumByteToWrite<=secremain)secremain=NumByteToWrite;//不大于4096个字节while(1){W25QXX_Read(W25QXX_BUF,secpos*4096,4096);//读出整个扇区的内容for(i=0;i<secremain;i++)//校验数据{if(W25QXX_BUF[secoff+i]!=0XFF)break;//需要擦除}if(i<secremain)//需要擦除{W25QXX_Erase_Sector(secpos);//擦除这个扇区for(i=0;i<secremain;i++)//复制{W25QXX_BUF[i+secoff]=pBuffer[i];}W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096);//写入整个扇区}else W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain);//写已经擦除了的,直接写入扇区剩余区间.if(NumByteToWrite==secremain)break;//写入结束了else//写入未结束{secpos++;//扇区地址增1secoff=0;//偏移位置为0pBuffer+=secremain; //指针偏移WriteAddr+=secremain;//写地址偏移NumByteToWrite-=secremain;//字节数递减if(NumByteToWrite>4096)secremain=4096;//下一个扇区还是写不完else secremain=NumByteToWrite;//下一个扇区可以写完了}};
}
//擦除整个芯片
//等待时间超长...
void W25QXX_Erase_Chip(void)
{W25QXX_Write_Enable();//SET WELW25QXX_Wait_Busy();//等待忙状态W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(W25X_ChipErase);//发送片擦除命令W25QXX_CS(1);//0片选开启,1片选关闭W25QXX_Wait_Busy();//等待芯片擦除结束
}
//擦除一个扇区
//Dst_Addr:扇区地址 根据实际容量设置
//擦除一个扇区的最少时间:150ms
void W25QXX_Erase_Sector(uint32_t Dst_Addr)
{Dst_Addr*=4096;W25QXX_Write_Enable();//SET WELW25QXX_Wait_Busy();W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(W25X_SectorErase);//发送扇区擦除指令if(W25QXX_TYPE==W25Q256)//如果是W25Q256的话地址为4字节的,要发送最高8位{SPI2_ReadWriteByte((uint8_t)((Dst_Addr)>>24));}SPI2_ReadWriteByte((uint8_t)((Dst_Addr)>>16));//发送24bit地址SPI2_ReadWriteByte((uint8_t)((Dst_Addr)>>8));SPI2_ReadWriteByte((uint8_t)Dst_Addr);W25QXX_CS(1);//0片选开启,1片选关闭W25QXX_Wait_Busy();//等待擦除完成
}
//等待空闲
void W25QXX_Wait_Busy(void)
{while((W25QXX_ReadSR(1)&0x01)==0x01);//等待BUSY位清空
}
//进入掉电模式
void W25QXX_PowerDown(void)
{W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(W25X_PowerDown);//发送掉电命令 0xB9W25QXX_CS(1);//0片选开启,1片选关闭delay_us(3);//等待TPD
}
//唤醒
void W25QXX_WAKEUP(void)
{W25QXX_CS(0);//0片选开启,1片选关闭SPI2_ReadWriteByte(W25X_ReleasePowerDown);//发送电源唤醒指令 0xABW25QXX_CS(1);//0片选开启,1片选关闭delay_us(3);//等待TRES1
}//void delay_us(uint32_t us) //利用CPU循环实现的非精准应用的微秒延时函数
//{
// uint32_t delay = (HAL_RCC_GetHCLKFreq() / 8000000 * us); //使用HAL_RCC_GetHCLKFreq()函数获取主频值,经算法得到1微秒的循环次数
// while (delay--); //循环delay次,达到1微秒延时
//}w25qxx.h
#ifndef W25Q128_W25QXX_H_
#define W25Q128_W25QXX_H_#include "stm32f1xx_hal.h" //HAL库文件声明//25系列FLASH芯片厂商与容量代号(厂商代号EF)
#define W25Q80 0XEF13
#define W25Q16 0XEF14
#define W25Q32 0XEF15
#define W25Q64 0XEF16
#define W25Q128 0XEF17
#define W25Q256 0XEF18
#define EX_FLASH_ADD 0x000000 //W25Q128的地址是24位宽
extern uint16_t W25QXX_TYPE;//定义W25QXX芯片型号
extern SPI_HandleTypeDef hspi2;
//
//指令表
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg1 0x05
#define W25X_ReadStatusReg2 0x35
#define W25X_ReadStatusReg3 0x15
#define W25X_WriteStatusReg1 0x01
#define W25X_WriteStatusReg2 0x31
#define W25X_WriteStatusReg3 0x11
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
#define W25X_Enable4ByteAddr 0xB7
#define W25X_Exit4ByteAddr 0xE9
uint8_t SPI2_ReadWriteByte(uint8_t TxData);//SPI2总线底层读写
void W25QXX_CS(uint8_t a);//W25QXX片选引脚控制
uint8_t W25QXX_Init(void);//初始化W25QXX函数
uint16_t W25QXX_ReadID(void);//读取FLASH ID
uint8_t W25QXX_ReadSR(uint8_t regno);//读取状态寄存器
void W25QXX_4ByteAddr_Enable(void);//使能4字节地址模式
void W25QXX_Write_SR(uint8_t regno,uint8_t sr);//写状态寄存器
void W25QXX_Write_Enable(void);//写使能
void W25QXX_Write_Disable(void);//写保护
void W25QXX_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite);//无检验写SPI FLASH
void W25QXX_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead);//读取flash
void W25QXX_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite);//写入flash
void W25QXX_Erase_Chip(void);//整片擦除
void W25QXX_Erase_Sector(uint32_t Dst_Addr);//扇区擦除
void W25QXX_Wait_Busy(void);//等待空闲
void W25QXX_PowerDown(void);//进入掉电模式
void W25QXX_WAKEUP(void);//唤醒
//void delay_us(uint32_t us); //C文件中的函数声明
#endif /* W25Q128_W25QXX_H_ */main.c
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2024 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "spi.h"
#include "usart.h"
#include "gpio.h"
#include "w25qxx.h"
#include <stdio.h>
#include "delay.h"uint8_t EX_FLASH_BUF[1];/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{switch(GPIO_Pin) {case GPIO_PIN_3:EX_FLASH_BUF[0]=W25QXX_ReadID();printf ("芯片ID, %x \r\n", EX_FLASH_BUF[0]);printf("3 pressed! \r\n");break;case GPIO_PIN_4:W25QXX_Read(EX_FLASH_BUF,EX_FLASH_ADD,1);EX_FLASH_BUF[0]++;if(EX_FLASH_BUF[0]>200)EX_FLASH_BUF[0]=0;W25QXX_Write(EX_FLASH_BUF,EX_FLASH_ADD,1);printf("读出0x00地址数据:%d \n\r",EX_FLASH_BUF[0]);printf("4 pressed! \r\n");break;}
}
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD *//* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_SPI2_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */W25QXX_Init();printf("=============== \r\n");/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
相关文章:
STM32Cubmax stm32f103zet6 SPI通讯
一、基本概念 SPI 是英语 Serial Peripheral interface 的缩写,顾名思义就是串行外围设备接口。是 Motorola 首先在其 MC68HCXX 系列处理器上定义的。 SPI 接口主要应用在 EEPROM, FLASH,实时时 钟, AD 转换器,还有数…...

每日OJ题_位运算⑤_力扣371. 两整数之和
目录 力扣371. 两整数之和 解析代码 力扣371. 两整数之和 371. 两整数之和 难度 简单 给你两个整数 a 和 b ,不使用 运算符 和 - ,计算并返回两整数之和。 示例 1: 输入:a 1, b 2 输出:3示例 2: …...

Mysql中索引优化和失效
什么是索引 要了解索引优化和索引失效的场景就要先了解什么是索引 索引是一种有序的存储结构,按照单个或者多个列的值进行排序,以提升搜索效率。 索引的类型 UNIQUE唯一索引 不可以出现相同的值,可以有NULL值。 INDEX普通索引 允许出现相同…...
使用Python+OpenCV2进行图片中的文字分割(支持竖版)
扣字和分割 把图片中的文字,识别出来,并将每个字的图片抠出来; import cv2 import numpy as npHIOG 50 VIOG 3 Position []水平投影 def getHProjection(image):hProjection np.zeros(image.shape,np.uint8)# 获取图像大小(h,w)image.sh…...
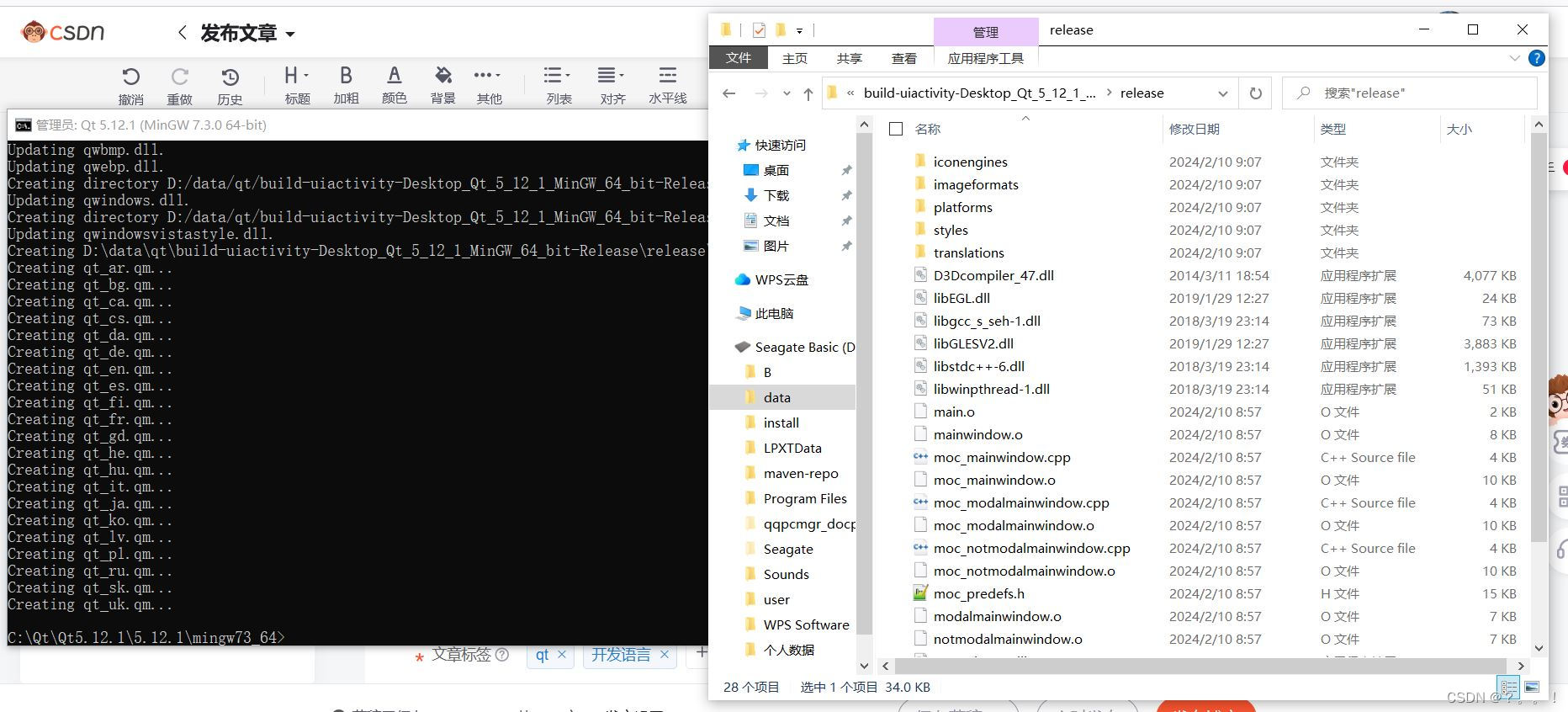
Qt中程序发布及常见问题
1、引言 当我们写好一个程序时通常需要发布给用户使用,那么在Qt中程序又是如何实现发布的呢,这里我就来浅谈一下qt中如何发布程序,以及发布程序时的常见问题。 2、发布过程 2.1、切换为release模式 当我们写qt程序时默认是debug模式&#x…...

C语言第二十三弹---指针(七)
✨个人主页: 熬夜学编程的小林 💗系列专栏: 【C语言详解】 【数据结构详解】 指针 1、sizeof和strlen的对比 1.1、sizeof 1.2、strlen 1.3、sizeof 和 strlen的对比 2、数组和指针笔试题解析 2.1、⼀维数组 2.2、二维数组 总结 1、si…...
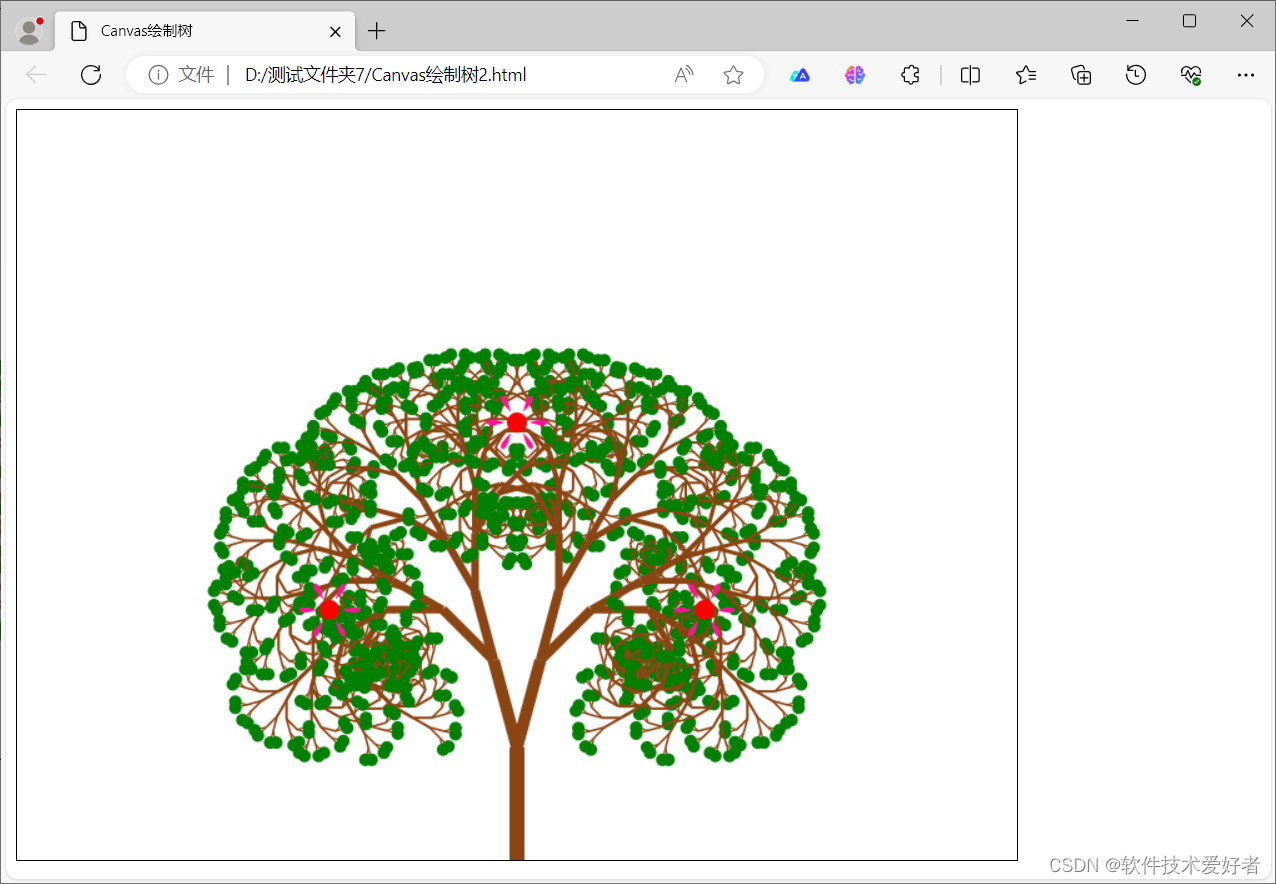
用HTML5 + JavaScript绘制花、树
用HTML5 JavaScript绘制花、树 <canvas>是一个可以使用脚本 (通常为JavaScript) 来绘制图形的 HTML 元素。 <canvas> 标签/元素只是图形容器,必须使用脚本来绘制图形。 HTML5 canvas 图形标签基础https://blog.csdn.net/cnds123/article/details/112…...

Science重磅_让大模型像婴儿一样学习语言
英文名称: Grounded language acquisition through the eyes and ears of a single child 中文名称: 通过一个孩子的眼睛和耳朵基于实践学习语言 文章: https://www.science.org/doi/10.1126/science.adi1374 代码: https://github.com/wkvong/multimodalbaby 作者: Wai Keen V…...

Java 数据结构篇-实现红黑树的核心方法
🔥博客主页: 【小扳_-CSDN博客】 ❤感谢大家点赞👍收藏⭐评论✍ 文章目录 1.0 红黑树的说明 2.0 红黑树的特性 3.0 红黑树的成员变量及其构造方法 4.0 实现红黑树的核心方法 4.1 红黑树内部类的核心方法 (1)判断当前…...
【实战】一、Jest 前端自动化测试框架基础入门(中) —— 前端要学的测试课 从Jest入门到TDD BDD双实战(二)
文章目录 一、Jest 前端自动化测试框架基础入门5.Jest 中的匹配器toBe 匹配器toEqual匹配器toBeNull匹配器toBeUndefined匹配器和toBeDefined匹配器toBeTruthy匹配器toBeFalsy匹配器数字相关的匹配器字符串相关的匹配器数组相关的匹配器异常情况的匹配器 6.Jest 命令行工具的使…...
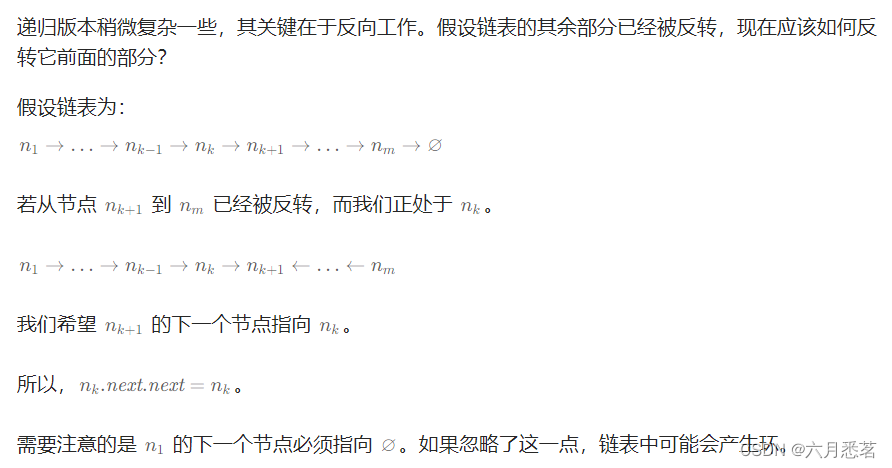
【C语言 - 力扣 - 反转链表】
反转链表题目描述 给你单链表的头节点 head ,请你反转链表,并返回反转后的链表。 题解1-迭代 假设链表为 1→2→3→∅,我们想要把它改成 ∅←1←2←3。 在遍历链表时,将当前节点的 next 指针改为指向前一个节点。由于节点没…...
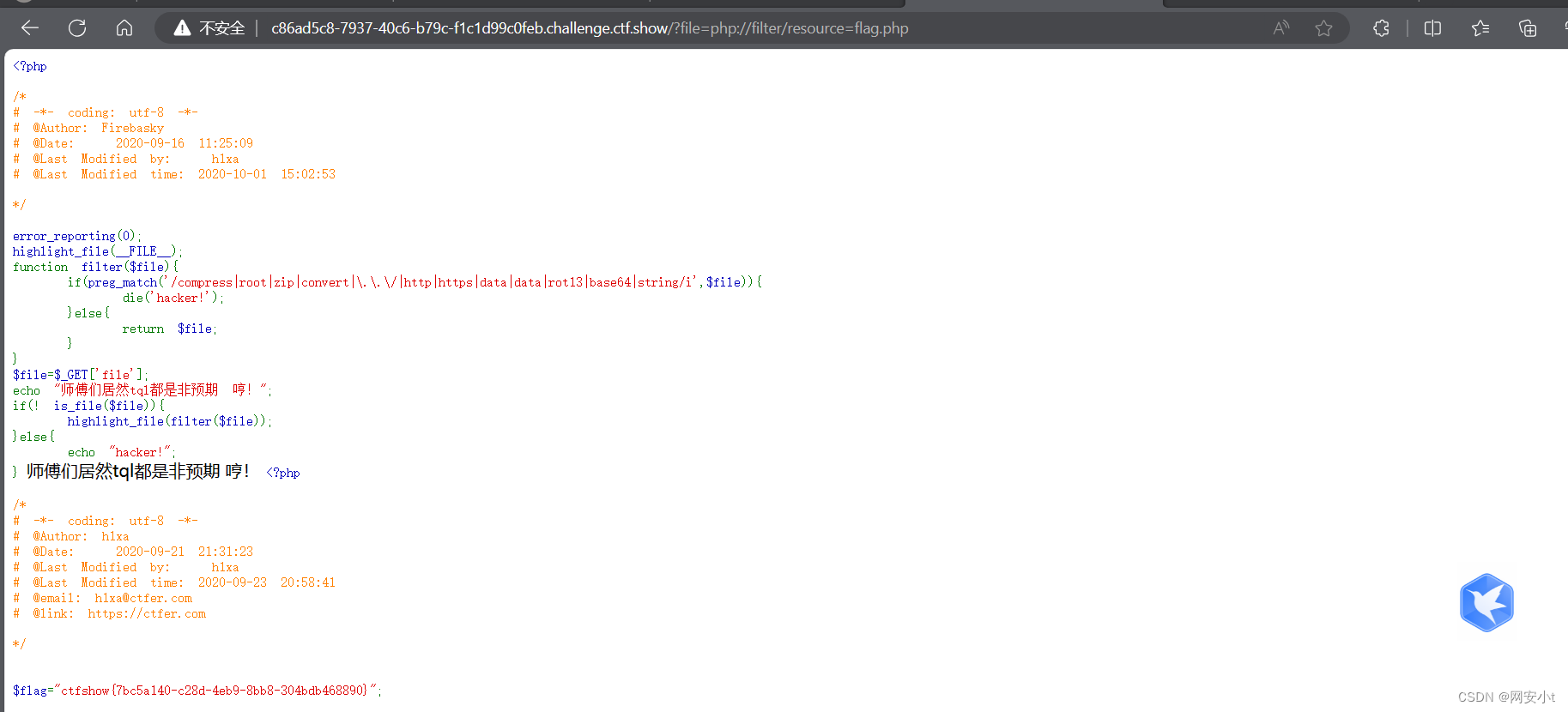
ctfshow-php特性(web102-web115)
目录 web102 web103 web104 web105 web106 web107 web108 web109 web110 web111 web112 web113 web114 web115 实践是检验真理的 要多多尝试 web102 <?php highlight_file(__FILE__); $v1$_POST[V1]; $v2$_GET[v2]; $v3$_GET[v3]; $v4is_numeric($v2)and is…...
python系统学习Day1
section1 python introduction 文中tips只做拓展,可跳过。 PartOne introduction 首先要对于python这门语言有一个宏观的认识,包括特点和应用场景。 特点分析: 优势 提供了完善的基础代码库,许多功能不必从零编写简单优雅 劣势 运…...

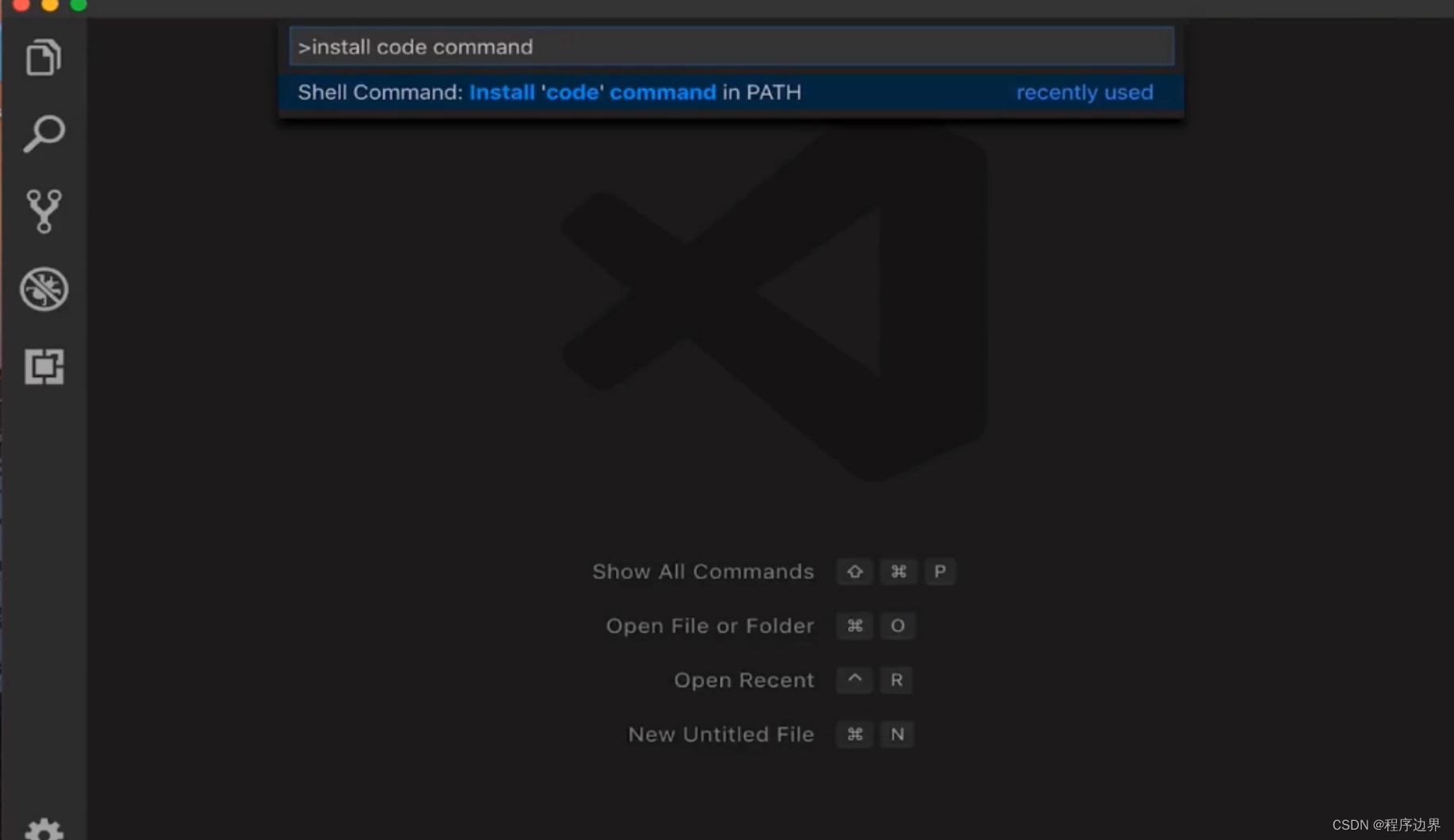
Idea里自定义封装数据警告解决 Spring Boot Configuration Annotation Processor not configured
我们自定对象封装指定数据,封装类上面一个红色警告,虽然不影响我们的执行,但是有强迫症看着不舒服, 去除方式: 在pom文件加上坐标刷新 <dependency><groupId>org.springframework.boot</groupId><…...

【流程图——讲解】
流程图介绍 流程图介绍 流程图介绍 流程图是一种图表,它展示了工作流程或过程中的步骤顺序,它通常由不同的符号表示,每个符号都代表一个步骤或过程中的一个元素,流程图非常有用,因为它们可以提供清晰、视觉化的过程表…...

「计算机网络」物理层
物理层的基本概念 物理层的作用:尽可能屏蔽掉不同传输媒体和通信手段的差异物理层规程:用于物理层的协议主要任务:确定与传输媒体的接口有关的一些特性 机械特性电器特性功能特性过程特性 数据通信的基础知识 数据通信系统的模型 划分为…...

ARM与X86架构的区别与联系
文章目录 1.什么是CPU2.复杂指令集和精简指令集3.ARM架构与X86架构的比较3.1.制造工艺3.2 64位计算3.3 异构计算3.4 功耗 4.ARM和X86的发展现状Reference 1.什么是CPU 中央处理单元(CPU)主要由运算器、控制器、寄存器三部分组成,从字面意思看…...
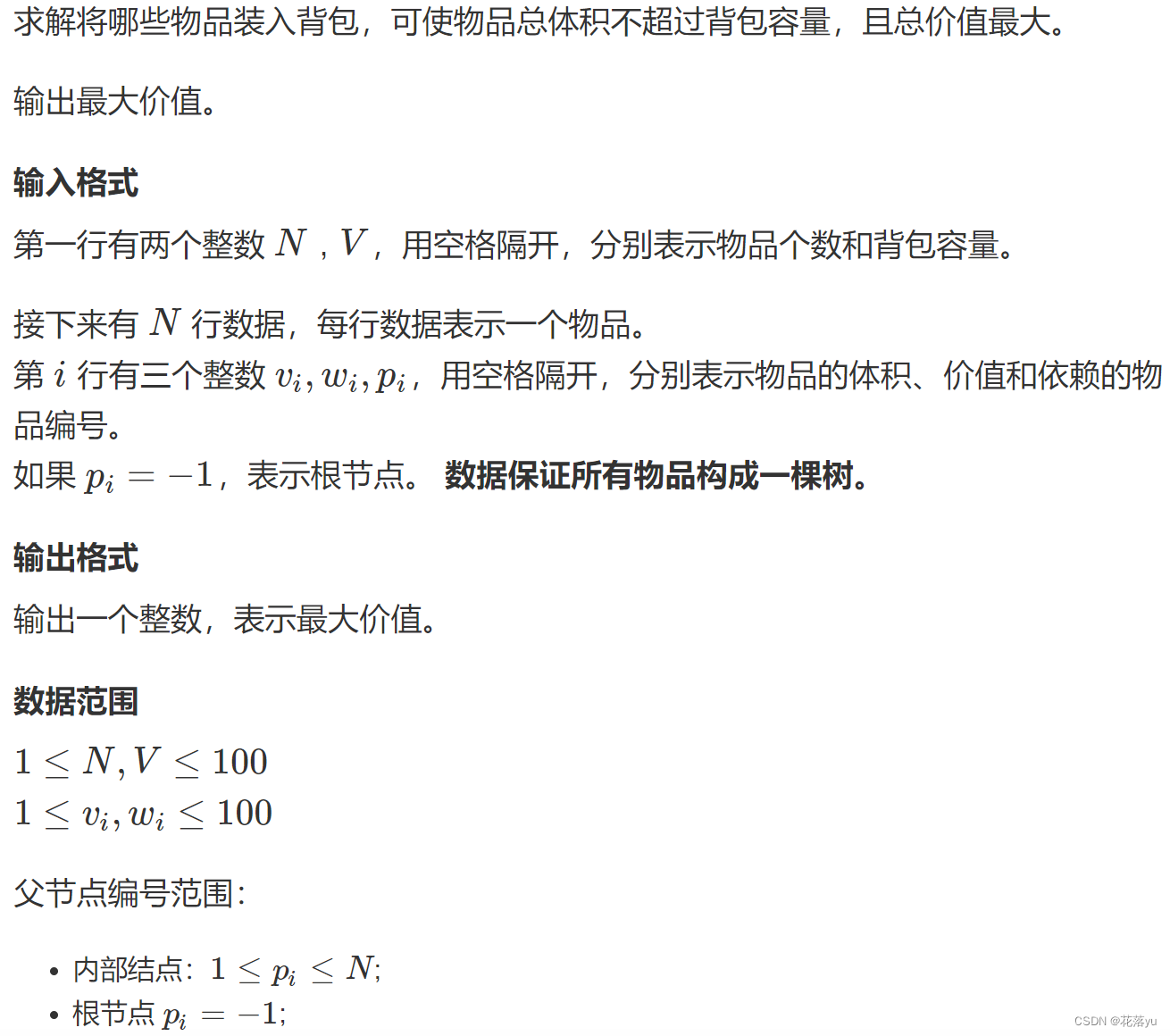
蓝桥杯每日一题------背包问题(二)
前言 本次讲解背包问题的一些延申问题,新的知识点主要涉及到二进制优化,单调队列优化DP,树形DP等。 多重背包 原始做法 多重背包的题意处在01背包和完全背包之间,因为对于每一个物品它规定了可选的个数,那么可以考虑…...
牛客错题整理——C语言(实时更新)
1.以下程序的运行结果是() #include <stdio.h> int main() { int sum, pad,pAd; sum pad 5; pAd sum, pAd, pad; printf("%d\n",pAd); }答案为7 由于赋值运算符的优先级高于逗号表达式,因此pAd sum, pAd, pad;等价于(…...

CIFAR-10数据集详析:使用卷积神经网络训练图像分类模型
1.数据集介绍 CIFAR-10 数据集由 10 个类的 60000 张 32x32 彩色图像组成,每类 6000 张图像。有 50000 张训练图像和 10000 张测试图像。 数据集分为5个训练批次和1个测试批次,每个批次有10000张图像。测试批次正好包含从每个类中随机选择的 1000 张图像…...

当贝盒子H5 64G版618首销TOP1!多平台登顶,凭什么这么火?
2026年5月14日,当贝官方发布了618抢先购首日当贝盒子H5 64G版的首销战报。据官方数据显示,这款重磅升级的电视盒子在京东、天猫、抖音三大主流电商平台的电视盒子类目热销榜中,全部拿下TOP1席位,成为今年618大促第一天的现象级爆款…...

PostgreSQL 13.8 子查询优化实战:手把手教你读懂 `pull_up_sublinks` 源码
PostgreSQL 13.8 子查询优化实战:手把手教你读懂 pull_up_sublinks 源码 数据库查询优化器是数据库系统的核心组件之一,它负责将用户提交的SQL语句转换为高效的执行计划。在PostgreSQL中,子查询优化是查询优化的重要环节,而pull_u…...

别再手动改端口了!用这个OrCAD小补丁,3分钟搞定原理图端口标准化
告别混乱设计:OrCAD端口标准化高效解决方案 在复杂的电子设计项目中,原理图的整洁与规范程度直接影响着团队协作效率和后期维护成本。当多位工程师共同参与同一项目时,端口类型和朝向的不统一往往成为困扰PCB设计团队的常见问题。这种看似微小…...

Creo二次开发避坑:用ProAsmcomppathInit搞定装配体遍历,别再卡在ProFeature转ProAsmcomppath了
Creo二次开发实战:高效构建装配体遍历路径的深度解析 在Creo二次开发领域,装配体遍历是许多高级功能的基础操作,但开发者常常会在ProFeature到ProAsmcomppath的转换过程中遭遇瓶颈。本文将从底层数据结构入手,揭示一种被多数文档忽…...
保姆级接线图解,附万用表检测电池坏点技巧)
别再乱接线了!12V手电钻保护板(B+/B-/B1/B2)保姆级接线图解,附万用表检测电池坏点技巧
12V手电钻保护板接线全攻略:从原理到实战的安全操作指南 面对手电钻保护板上密密麻麻的接线端子,即使是经验丰富的DIY爱好者也难免感到困惑。B、B-、B1、B2这些看似简单的标记背后,实际上隐藏着锂电池组安全工作的关键机制。本文将带您深入理…...

发现安卓应用宝库:APKMirror客户端让你安全下载任何版本应用
发现安卓应用宝库:APKMirror客户端让你安全下载任何版本应用 【免费下载链接】APKMirror 项目地址: https://gitcode.com/gh_mirrors/ap/APKMirror 还记得上次为了找一个旧版本的微信,在各种论坛里翻来覆去地找,最后下载的APK文件还让…...

2026届必备的六大AI辅助论文方案实际效果
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 处在信息爆炸的当下之时段,内容创作成为了个人以及企业的核心竞争力所在。针对广…...

完整指南:如何通过JiYuTrainer高效解除极域电子教室限制
完整指南:如何通过JiYuTrainer高效解除极域电子教室限制 【免费下载链接】JiYuTrainer 极域电子教室防控制软件, StudenMain.exe 破解 项目地址: https://gitcode.com/gh_mirrors/ji/JiYuTrainer JiYuTrainer是一款专业级的极域电子教室破解工具,…...

构建高效电商后台管理系统:SpringBoot 项目推荐
构建高效电商后台管理系统:SpringBoot 项目推荐 【下载地址】SpringBoot电商后台管理系统项目介绍 本项目基于SpringBoot框架实现,提供了一套完整的电商后台管理系统解决方案。系统专注于用户管理和权限管理两大核心功能模块,旨在帮助开发者快…...
)
C#上位机实战:手把手教你用WinForm控制艾德克斯IT6322B程控电源(附完整源码)
C#工业级程控电源上位机开发实战:从协议解析到多线程安全控制 在工业自动化测试领域,程控电源作为核心供电设备,其精确控制能力直接影响测试结果的可靠性。传统的手动调节方式早已无法满足现代生产线对效率和一致性的要求。以艾德克斯IT6322…...