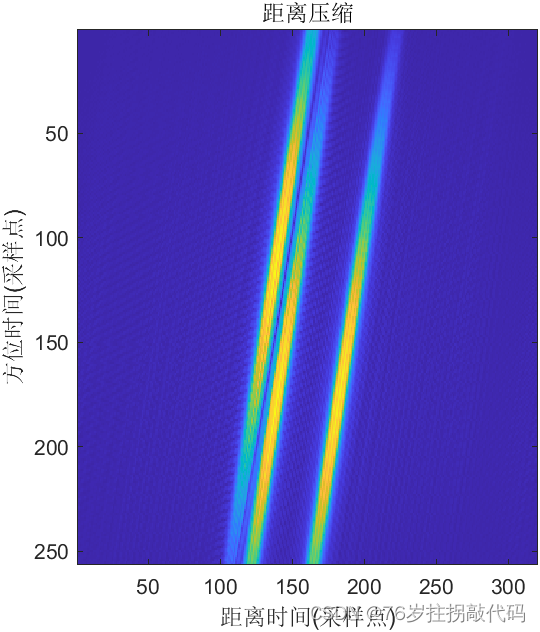
《合成孔径雷达成像算法与实现》FIgure6.20

% rho_r = c/(2*Fr)而不是rho_r = c/(2*Bw)
% Hsrcf exp函数里忘记乘pi了
clc
clear
close all参数设置
距离向参数设置
R_eta_c = 20e3; % 景中心斜距
Tr = 2.5e-6; % 发射脉冲时宽
Kr = 20e12; % 距离向调频率
alpha_os_r = 1.2; % 距离过采样率
Nrg = 320; % 距离线采样数
距离向参数计算
Bw = abs(Kr)*Tr; % 距离信号带宽
Fr = alpha_os_r*Bw; % 距离向采样率
Nr = round(Fr*Tr); % 距离采样点数(脉冲序列长度)
方位向参数设置
c = 3e8; % 光速
Vr = 150; % 等效雷达速度
Vs = Vr; % 卫星平台速度
Vg = Vr; % 波束扫描速度
f0 = 5.3e9; % 雷达工作频率
Delta_f_dop = 80; % 多普勒带宽
alpha_os_a = 1.25; % 方位过采样率
Naz = 256; % 距离线数
theta_r_c = 21.9; % 波束斜视角
方位向参数计算
lambda = c/f0; % 雷达工作波长
eta_c = -R_eta_c*sind(theta_r_c)/Vr;% 波束中心偏移时间
f_eta_c = 2*Vr*sind(theta_r_c)/lambda;% 多普勒中心频率
La = 0.886*2*Vs*cosd(theta_r_c)/Delta_f_dop;% 实际天线长度
Fa = alpha_os_a*Delta_f_dop;% 方位向采样率
Ta = 0.886*lambda*R_eta_c/(La*Vg*cosd(theta_r_c));% 目标照射时间
R0 = R_eta_c*cosd(theta_r_c);% 最短斜距
Ka = 2*Vr^2*cosd(theta_r_c)^3/(lambda*R0);% 方位向调频率
theta_bw = 0.886*lambda/La; % 方位向3dB波束宽度
theta_syn = Vs/Vg*theta_bw; % 合成角
Ls = R_eta_c*theta_syn; % 合成孔径
其他参数计算
rho_r = c/2/Fr; % 距离向分辨率
rho_a = La/2; % 方位向分辨率
Trg = Nrg/Fr; % 发射脉冲宽度
Taz = Naz/Fa; % 目标照射时间
d_t_tau = 1/Fr; % 距离向采样时间间隔
d_t_eta = 1/Fa; % 方位向采样时间间隔
d_f_tau = Fr/Nrg; % 距离向采样频率间隔
d_f_eta = Fa/Naz; % 方位向采样频率间隔目标设置
设置目标点距离景中心的距离
A_r = -50;A_a = -50;
B_r = -50;B_a = +50;
C_r = +50;C_a = B_a+(C_r-B_r)*tand(theta_r_c);
坐标
A_x = R0+A_r;A_y = A_a;
B_x = R0+B_r;B_y = B_a;
C_x = R0+C_r;C_y = C_a;
N_position = [A_x,A_y;B_x,B_y;C_x,C_y];
波束中心穿越时刻
N_target = 3;
Target_eta_c = zeros(1,N_target);
for i = 1:N_targetDelta_Y = N_position(i,2)-N_position(i,1)*tand(theta_r_c);Target_eta_c(i) = Delta_Y/Vs;
end
绝对零多普勒时刻
Target_eta_0 = zeros(1,N_target);
for i = 1:N_targetTarget_eta_0(i) = N_position(i,2)/Vs;
end变量设置
时间变量:以景中心绝对零多普勒时刻作为方位向零点
t_tau = (-Trg/2:d_t_tau:Trg/2-d_t_tau)+2*R_eta_c/c; % 距离时间变量
t_eta = (-Taz/2:d_t_eta:Taz/2-d_t_eta)+eta_c; % 方位时间变量
r_tau = (t_tau*c/2)*cosd(theta_r_c); % 最近距离变量
频率变量
f_tau = fftshift(-Fr/2:d_f_tau:Fr/2-d_f_tau); % 距离频率变量
f_tau = f_tau-round((f_tau-0)/Fr)*Fr; % 将频率折叠入(-Fr/2,Fr/2),距离可观测频率变量
f_eta = fftshift(-Fa/2:d_f_eta:Fa/2-d_f_eta); % 方位频率变量
f_eta = f_eta-round((f_eta-f_eta_c)/Fa)*Fa; % 将频率折叠入f_eta_c附近(-Fa/2,Fa/2)范围,方位可观测频率变量
坐标设置
[t_tauX,t_etaY] = meshgrid(t_tau,t_eta); % 距离时间X轴,方位时间Y轴
[f_tauX,f_etaY] = meshgrid(f_tau,f_eta); % 距离频域X轴,方位频域Y轴
[r_tauX,f_eta_Y] = meshgrid(r_tau,f_eta); % 距离长度X轴,方位频域Y轴信号设置,原始回波生成
tic % 计时,与toc搭配使用
wait_title = waitbar(0,'开始生成回波数据 ...');
pause(1);
st_tt = zeros(Naz,Nrg);
for i = 1:N_targetR_eta = sqrt(N_position(i,1)^2+Vs^2*(t_etaY-Target_eta_0(i)).^2);% 瞬时斜距,还有近似公式可以尝试A0 = [1,1,1,1]*exp(+1j*0); % 后向散射系数wr = (abs(t_tauX-2*R_eta/c)<=Tr/2); % 距离向包络wa = sinc(0.886*atan(Vs*(t_etaY-Target_eta_c(i))/N_position(i,1))/theta_bw).^2;% 方位向包络,用波束穿越时刻
% wa = sinc(0.886*(atan(Vs*(t_etaY-Target_eta_0(i))/N_position(i,1))+theta_r_c)/theta_bw).^2;st_tt_target = A0(i)*wr.*wa.*exp(-1j*4*pi*f0*R_eta/c)....*exp(1j*pi*Kr*(t_tauX-2*R_eta/c).^2);st_tt = st_tt+st_tt_target;pause(0.001);time = toc;Display_Data = num2str(roundn(i/N_target*100,-1));Display_Str = ['Computation Progress',Display_Data,'%',' --- ',...'Using Time: ',num2str(time)];waitbar(i/N_target,wait_title,Display_Str); % 三参数:进度,句柄,展示的话
end
pause(1);
close(wait_title);
tocH = figure();
set(H,'position',[100,100,600,600]);
subplot(221)
imagesc(real(st_tt))
xlabel('距离时间(采样点)'),ylabel('方位时间(采样点)'),title('(a)实部')
subplot(222)
imagesc(imag(st_tt))
xlabel('距离时间(采样点)'),ylabel('方位时间(采样点)'),title('(b)虚部')
subplot(223)
imagesc(abs(st_tt))
xlabel('距离时间(采样点)'),ylabel('方位时间(采样点)'),title('(c)幅度')
subplot(224)
imagesc(angle(st_tt))
xlabel('距离时间(采样点)'),ylabel('方位时间(采样点)'),title('(d)相位')一次距离压缩+二次距离压缩
方式三:根据脉冲频谱特性直接在频域生成频域匹配滤波器
window = kaiser(Nrg,2.5)'; % 时域窗
Window = fftshift(window); % 频域窗
% 计算滤波器
D0 = sqrt(1-lambda^2*f_eta_c^2/(4*Vr^2));
Ksrc = 2*Vr^2*f0^3*D0^3/(c*R0*f_eta_c^2);
Km = Kr*Ksrc/(Ksrc-Kr);
% Hrf = (abs(f_tauX)<=Bw/2).*Window.*exp(+1j*pi*f_tauX.^2/Kr);
Hrf = (abs(f_tauX)<=Bw/2).*Window.*exp(+1j*pi*f_tauX.^2/Km);
Sf_ft = fft(st_tt,Nrg,2);
Srf_ft = Sf_ft.*Hrf;
srt_tt = ifft(Srf_ft,Nrg,2);figure('Name','一次距离压缩'),subplot(121)
imagesc(real(srt_tt))
xlabel('距离时间(采样点)'),ylabel('方位时间(采样点)'),title('(a)实部')
subplot(122)
imagesc(abs(srt_tt))
xlabel('距离时间(采样点)'),ylabel('方位时间(采样点)'),title('(b)虚部')方位向FFT
Saf_tf = fft(srt_tt,Naz,1);
figure,imagesc(abs(Saf_tf)),set(gca,'YDir','normal'),title('方位向FFT')距离徙动校正——8点插值
% RCM = lambda^2*r_tauX.*f_etaY.^2/(8*Vr^2);
% RCM = R0+RCM-R_eta_c; % 将距离徙动量转换到原图坐标系下
D = sqrt(1-lambda^2*f_etaY.^2/(4*Vr^2)); % 距离多普勒域中的徙动因子
RCM = r_tauX./D-r_tauX;
RCM = R0+RCM-R_eta_c; % 将距离徙动量转换到原图坐标系下
offset = RCM/rho_r; % 将距离徙动量转换为距离单元偏移量
计算插值表
x_tmp = repmat(-4:3,[16,1]); % 插值长度
x_tmp = x_tmp+repmat(((1:16)/16).',[1,8]); % 量化位移
% figure,imagesc(repmat(((1:16)/16)',[1,8])),colorbar
% figure,imagesc(repmat(-4:3,[16,1])),colorbar
% figure,imagesc(repmat(((1:16)/16)',[1,8])+repmat(-4:3,[16,1])),colorbar
hx = sinc(x_tmp); % 生成插值核
% % figure,imagesc(hx)
hx = kaiser(8,2.5)'.*hx;
hx = hx./sum(hx,2); % 归一化
插值表校正
Srcmf_tf_8 = zeros(Naz,Nrg);
for a_tmp = 1:Nazfor r_tmp = 1:Nrgoffset_ceil = ceil(offset(a_tmp,r_tmp));offset_frac = round((offset_ceil-offset(a_tmp,r_tmp))*16);if offset_frac == 0Srcmf_tf_8(a_tmp,r_tmp) = Saf_tf(a_tmp,ceil(mod(r_tmp+offset_ceil-0.1,Nrg)));elseSrcmf_tf_8(a_tmp,r_tmp) = Saf_tf(a_tmp,ceil(mod((r_tmp+offset_ceil-4:r_tmp+offset_ceil+3)-0.1,Nrg)))*hx(offset_frac,:).';endend
endfigure('Name','8点距离徙动校正'),subplot(121)
imagesc(real(Srcmf_tf_8)),set(gca,'YDir','normal')
xlabel('距离时间(采样点)'),ylabel('方位频率(采样点)'),title('(a)实部')
subplot(122)
imagesc(abs(Srcmf_tf_8)),set(gca,'YDir','normal')
xlabel('距离时间(采样点)'),ylabel('方位频率(采样点)'),title('(b)幅度')方位压缩
Ka = 2*Vr^2*cosd(theta_r_c)^3./(lambda*r_tauX);
Haf = exp(-1j*pi*f_etaY.^2./Ka); % 匹配滤波器
Haf_offset = exp(-1j*2*pi*f_etaY*eta_c); % 时间补偿项
Soutf_tf = Srcmf_tf_8.*Haf.*Haf_offset;
soutt_tt = ifft(Soutf_tf,Naz,1);绘图
H1 = figure();
set(H1,'position',[100,100,600,300]);
subplot(121),imagesc(real(soutt_tt))
xlabel('距离时间(采样点)→'),ylabel('←方位时间(采样点)'),title('(a)实部')
subplot(122),imagesc( abs(soutt_tt)),colorbar
xlabel('距离时间(采样点)→'),ylabel('←方位时间(采样点)'),title('(b)幅度')点目标分析
len = 16;
cut = -len/2:len/2-1;
% sout_tt_C = soutt_tt(round(Naz/2+1+N_position(3,2)/Vr*Fa)+cut, ...
% round(Nrg/2+1+2*(N_position(3,1)-R0)/c*Fr)+cut);
sout_tt_C = soutt_tt(226+cut, 181+cut);
figure,imagesc(abs(sout_tt_C)),title('切片')Sout_ff_C = fft2(sout_tt_C);
figure,imagesc(abs(Sout_ff_C)),set(gca,'YDir','normal')Start_ff_1 = Sout_ff_C;% 高频补零
Start_buling_1 = zeros(len,16*len);
Start_buling_2 = zeros(16*len,16*len);
% 行补零
for i = 1:len[~,I] = min(Start_ff_1(i,:));Start_buling_1(i,1:I) = Start_ff_1(i,1:I);Start_buling_1(i,16*len-(len-I)+1:16*len) = Start_ff_1(i,I+1:end);
end
% 列补零
for i = 1:16*len[~,I] = min(Start_buling_1(:,i));Start_buling_2(1:I,i) = Start_buling_1(1:I,i);Start_buling_2(16*len-(len-I)+1:16*len,i) = Start_buling_1(I+1:end,i);
endstart_tf_1 = ifft(Start_buling_2,[],2);
start_tt_2 = ifft(start_tf_1,[],1);
% Start_ff_2 = fft2(start_tt_2);
% figure,imagesc(abs(fftshift(Start_ff_2))),set(gca,'YDir','normal')figure('Name','高频补零'),imagesc(abs(start_tt_2))
contour(abs(start_tt_2),15)% p为行索引,q为列索引
[aa,p] = max(start_tt_2);
[bb,q] = max(max(start_tt_2));% 距离切片
start_r = abs(start_tt_2(p(q),:));
start_r = db(start_r/max(start_r));
figure,plot(start_r),ylim([-35,0])% 方位切片
start_a = abs(start_tt_2(:,q));
start_a = db(start_a/max(start_a));
figure,plot(start_a),ylim([-35,0])% 距离向相位
start_r_p = rad2deg(angle(start_tt_2(p(q),:)));
figure,plot(start_r_p),xlim([0,16*len])% 方位向相位
start_a_p = rad2deg(angle(start_tt_2(:,q)));
figure,plot(start_a_p),xlim([0,16*len])



相关文章:
《合成孔径雷达成像算法与实现》FIgure6.20
% rho_r c/(2*Fr)而不是rho_r c/(2*Bw) % Hsrcf exp函数里忘记乘pi了 clc clear close all参数设置 距离向参数设置 R_eta_c 20e3; % 景中心斜距 Tr 2.5e-6; % 发射脉冲时宽 Kr 20e12; % 距离向调频率 alpha_os_r 1.2; …...
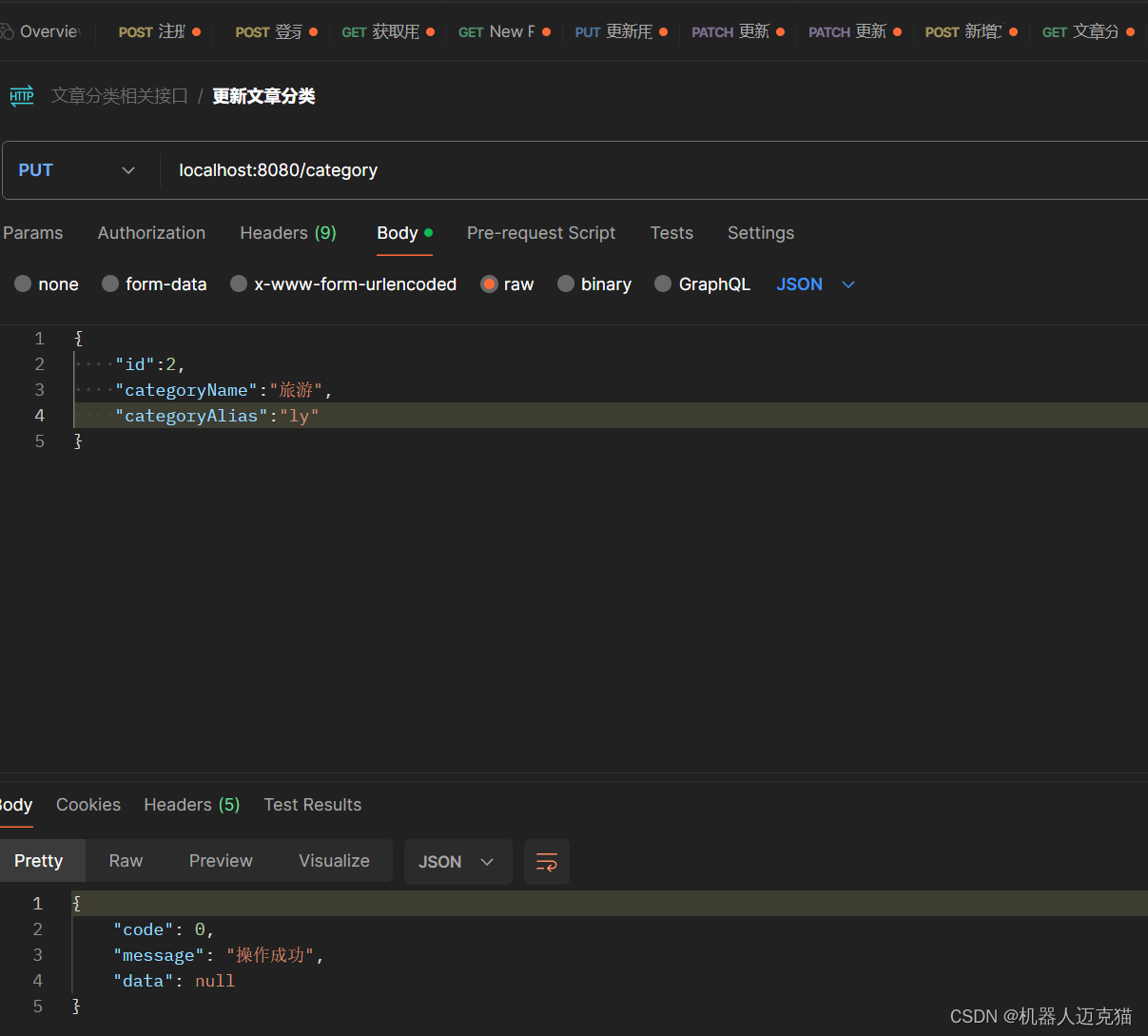
Spring Boot 笔记 015 创建接口_更新文章分类
1.1.1 实体类id增加NotNull注释,并做分组校验 1.1.1.1 定义分组 1.1.1.2 实体类中指定校验项属于哪个分组 如果说某个校验项没有指定分组,默认属于Default分组 分组之间可以继承, A extends B 那么A中拥有B中所有的校验项package com.geji.pojo;import com.faste…...

【Java基础题型】判断是否是回文数
需求:如果给你一个正数x。 如果x是一个回文整数,打印true,否则,返回false 解释: 回文数是指正序(从左到右)和从倒序(从右到左)都是一样的整数数字。 eg.121是回文数,123不是,2112是回文数&…...
)
Linux paste命令教程:并行合并文件的利器(附案例详解和注意事项)
Linux paste命令介绍 paste 是一个在 Unix 或 Linux 操作系统中非常有用的命令。它用于通过在标准输出中输出由每个指定文件的行组成的行,以制表符为分隔符,来水平(并行)合并文件。 Linux paste命令适用的Linux版本 paste 命令…...
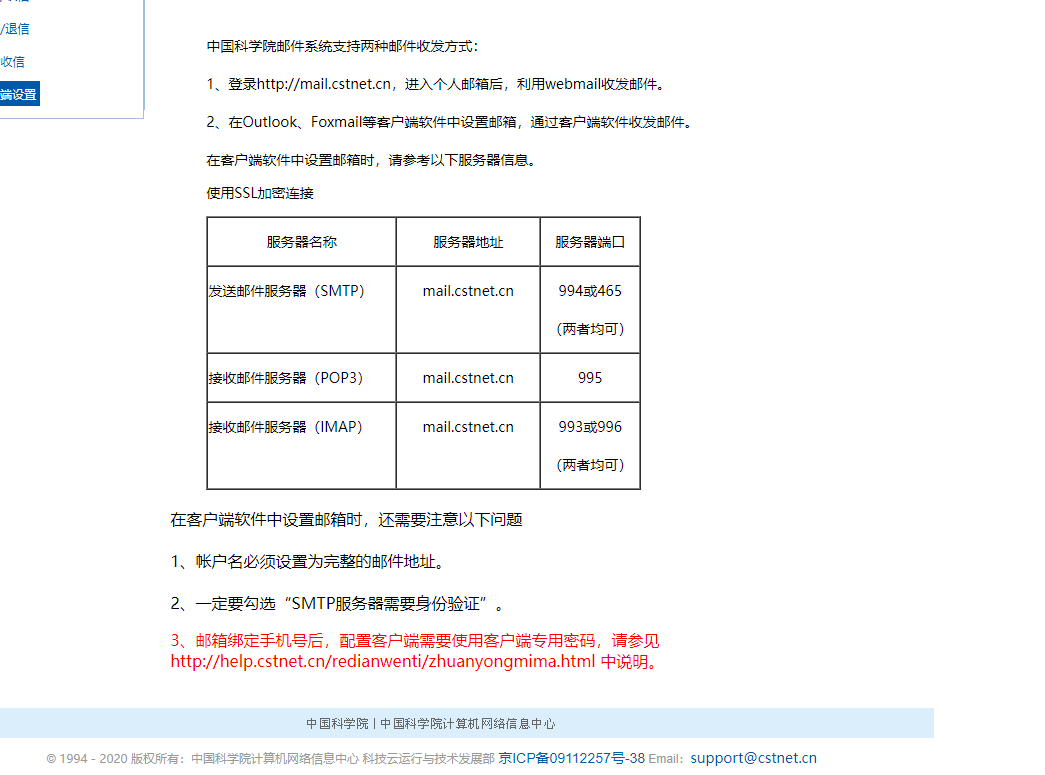
用163邮箱或者outlook接收国科大邮箱的邮件
使用如图下路径,创建一个新的密码,用于在163大师邮箱或者outlook登录即可 如果不行,则需要手动配置邮箱服务器 参考网址:中国科学院邮件系统帮助中心...

VitePress-15- 配置- description 的作用详解
作用描述 1、descriptioin 是站点的描述, 会被解析为 html 页面的 <meta name"description" content "xxx"> 标签 。2、description 本身就是 <meta> 标签的一种,不会在页面上展示出来, 仅仅是作为页面的一…...
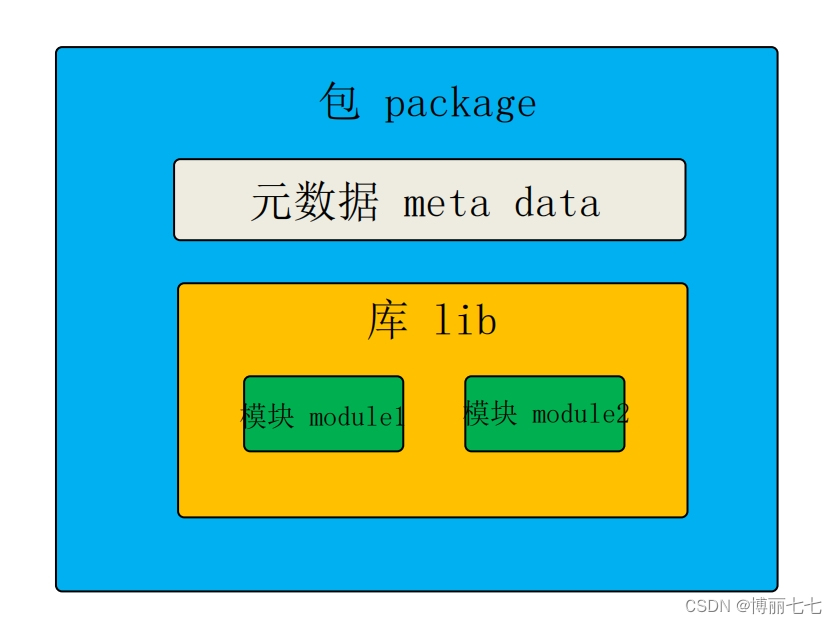
寒假学习记录17:包管理器(包管理工具)
概念 包(package) 包含元数据的库,这些元数据包括:名称,描述,git主页,许可证协议,作者,依赖..... 库(library,简称lib) 以一个或多个模…...

【AIGC】Stable Diffusion的常见错误
Stable Diffusion 在使用过程中可能会遇到各种各样的错误。以下是一些常见的错误以及可能的解决方案: 模型加载错误:可能出现模型文件损坏或缺失的情况。解决方案包括重新下载模型文件,确保文件完整并放置在正确的位置。 依赖项错误&#x…...

线段树解决-----P1161 开灯 P1047 [NOIP2005 普及组] 校门外的树 python解法
# [NOIP2005 普及组] 校门外的树 ## 题目描述 某校大门外长度为 l 的马路上有一排树,每两棵相邻的树之间的间隔都是 1 米。我们可以把马路看成一个数轴,马路的一端在数轴 0 的位置,另一端在 l的位置;数轴上的每个整数点…...

学习总结16
# 【模板】最小生成树 ## 题目描述 如题,给出一个无向图,求出最小生成树,如果该图不连通,则输出 orz。 ## 输入格式 第一行包含两个整数 N,M,表示该图共有 N 个结点和 M 条无向边。 接下来 M 行每行包含三个整数 …...
问题:从完整的问题解决过程来看,( )是首要环节。A.理解问题 B.提出假设C.发现问题 D.检验假设 #学习方法#学习方法
问题:从完整的问题解决过程来看,( )是首要环节。A.理解问题 B.提出假设C.发现问题 D.检验假设 A.理解问题 B.提出假设 C.发现问题 参考答案如图所示...

服务器感染了.mallox勒索病毒,如何确保数据文件完整恢复?
导言: 在当今数字化的世界中,恶意软件已成为企业和个人数据安全的一大威胁,其中.mallox勒索病毒是最为恶劣的之一。本文91数据恢复将介绍.mallox勒索病毒的特点,以及如何恢复被其加密的数据文件以及预防措施。 如果您正在经历勒索…...

Android java基础_多态性
一.Android Java基础_多态性 向上转换:只能定义被子类覆写的方法,不能调用在子类中定义的方法。 class Father {private int money; public int getMoney() {return money; }public void setMoney(int money) {this.money money; }public void printInfo() {Syst…...

面试前的准备
目录: 面试前的准备Java程序员校招与社招的区别校招与社招的区别:Java程序员投递简的正确方式投递简历时的误区简历投递时间Java程序员如何应对面试邀约Java程序员如何对公司做背调面试前的技术准备 面试前的准备 Java程序员校招与社招的区别 校招和社招…...

前端架构: 本地调试脚手架的2种方式
一、 调试简单的脚手架方式 假定脚手架名称是 xxx 1 )方式1 在xxx脚手架项目目录的上一级,执行 npm i -g xxx这时候,就可以本地调试脚手架,在前文中已经说明软链的作用参考:https://blog.csdn.net/Tyro_java/article…...

现阶段适用于 单一架构 还是 分布式架构 ?
单体架构: 优势:简单直接,易于理解和开发,适用于小型应用或刚刚开始的项目。劣势:扩展性受限,只能通过增加服务器的数量来提高处理能力;所有模块都部署在一个单独的服务器或容器中,…...

掌握Go并发:Go语言并发编程深度解析
🏷️个人主页:鼠鼠我捏,要死了捏的主页 🏷️系列专栏:Golang全栈-专栏 🏷️个人学习笔记,若有缺误,欢迎评论区指正 前些天发现了一个巨牛的人工智能学习网站,通俗易懂&…...

创建一个多进程服务器和多线程服务器
多进程服务器 #include<myhead.h> #define PORT 8888 //端口号 #define IP "192.168.10.10" //IP地址//定义信号处理函数,用于回收僵尸进程 void handler(int signo) {if(signo SIGCHLD){while(waitpid(-1, NULL, WNOHAN…...
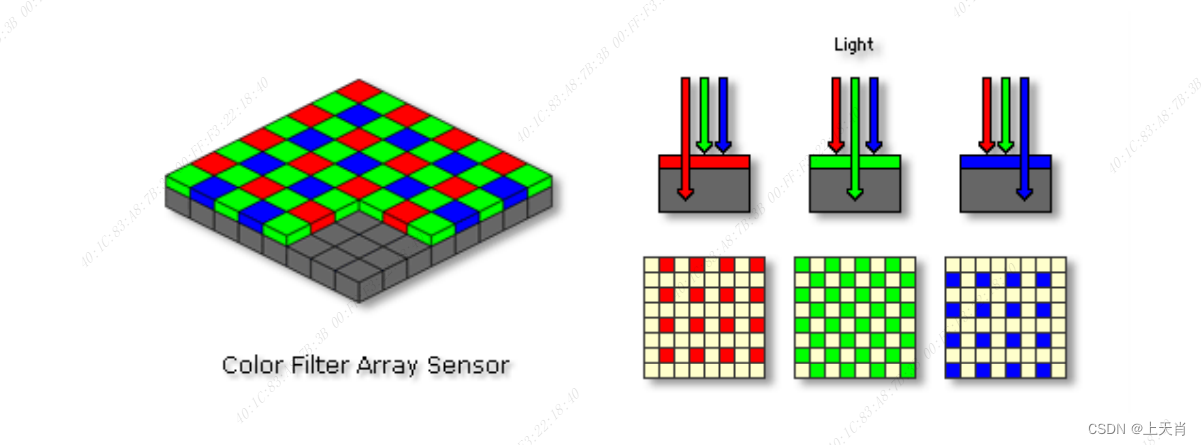
相机图像质量研究(18)常见问题总结:CMOS期间对成像的影响--CFA
系列文章目录 相机图像质量研究(1)Camera成像流程介绍 相机图像质量研究(2)ISP专用平台调优介绍 相机图像质量研究(3)图像质量测试介绍 相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距 相机图像质量研究(5)常见问题总结:光学结构对成…...

18.谈谈你对JSON的理解
JSON 是一种基于文本的轻量级的数据交换格式。它可以被任何的编程语言读取和作为数据格式来传递。 在项目开发中,使用 JSON 作为前后端数据交换的方式。在前端通过将一个符合 JSON 格式的数据结构序列化为 JSON 字符串,然后将它传递到后端,后…...

微信好友关系检测工具完整指南:如何快速发现谁删除了你
微信好友关系检测工具完整指南:如何快速发现谁删除了你 【免费下载链接】WechatRealFriends 微信好友关系一键检测,基于微信ipad协议,看看有没有朋友偷偷删掉或者拉黑你 项目地址: https://gitcode.com/gh_mirrors/we/WechatRealFriends …...

RK3562核心板选型与开发实战:从硬件拆解到软件适配
1. 项目概述:为什么是PET_RK3562_CORE? 在嵌入式开发领域,尤其是智能硬件和物联网设备的设计中,核心板的选择往往是决定项目成败、成本控制和技术路线的关键一步。最近几年,基于ARM架构的国产化芯片方案异军突起&#…...

重新定义光学设计:Inkscape光线追踪插件带来的矢量图形仿真新范式
重新定义光学设计:Inkscape光线追踪插件带来的矢量图形仿真新范式 【免费下载链接】inkscape-raytracing An extension for Inkscape that makes it easier to draw optical diagrams. 项目地址: https://gitcode.com/gh_mirrors/in/inkscape-raytracing 当…...

对比直接使用厂商 API 观察 Taotoken 在用量与成本可视化方面的优势
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用厂商 API 观察 Taotoken 在用量与成本可视化方面的优势 效果展示类,从个人开发者视角出发,分享…...

智能电视网页浏览新选择:TV Bro浏览器如何改变你的大屏体验
智能电视网页浏览新选择:TV Bro浏览器如何改变你的大屏体验 【免费下载链接】tv-bro Simple web browser for android optimized to use with TV remote 项目地址: https://gitcode.com/gh_mirrors/tv/tv-bro 你是否曾在智能电视上尝试浏览网页,却…...

BOTW-Save-Editor-GUI 完整技术指南:Nintendo Switch 塞尔达传说存档编辑终极方案
BOTW-Save-Editor-GUI 完整技术指南:Nintendo Switch 塞尔达传说存档编辑终极方案 【免费下载链接】BOTW-Save-Editor-GUI A Work in Progress Save Editor for BOTW 项目地址: https://gitcode.com/gh_mirrors/bo/BOTW-Save-Editor-GUI BOTW-Save-Editor-GU…...

使用Taotoken后我们如何清晰观测各模型的用量与延迟表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Taotoken后我们如何清晰观测各模型的用量与延迟表现 当团队在项目中同时接入多个大语言模型时,一个常见的困扰随之…...

从硬件连接到数据可视化:基于RS485-USB的传感器数据采集全流程解析
1. 硬件连接:从传感器到电脑的物理链路搭建 工业传感器数据采集的第一步,就是建立可靠的物理连接。以常见的星仪压力变送器为例,我们需要解决三个关键问题:传感器供电、信号传输转换、以及电脑端识别。这里我分享几个实际项目中容…...

KLayout 0.30.0:如何用这款专业版图工具提升你的集成电路设计效率
KLayout 0.30.0:如何用这款专业版图工具提升你的集成电路设计效率 【免费下载链接】klayout KLayout Main Sources 项目地址: https://gitcode.com/gh_mirrors/kl/klayout 如果你正在寻找一款既强大又灵活的开源集成电路版图查看与编辑工具,KLayo…...

obamify跨平台兼容性解决方案:从桌面到Web的完美迁移指南
obamify跨平台兼容性解决方案:从桌面到Web的完美迁移指南 【免费下载链接】obamify revolutionary new technology that turns any image into obama 项目地址: https://gitcode.com/gh_mirrors/ob/obamify 想要在任何设备上将图片转换为奥巴马风格吗&#x…...