Linux第51步_移植ST公司的linux内核第3步_添加修改设备树
1、设备树文件的路径
1)、创建linux中的设备树头文件
在“my_linux/linux-5.4.31/arch/arm/boot/dts/”目录中,以“stm32mp15xx-edx.dtsi”为蓝本,复制一份,并命名为 “stm32mp157d-atk.dtsi”,这就是我们开发板的设备树头文件。
2)、创建linux中的设备树文件
在“my_linux/linux-5.4.31/arch/arm/boot/dts/”目录中,以“stm32mp157d-ed1.dts”为蓝本,复制一份,并命名为 “stm32mp157d-atk.dts”,这就是我们开发板的设备树文件。
2、添加设备树
1)、打开终端
输入“ls回车”
输入“cd linux/回车”,切换到“linux”目录
输入“ls回车”,列出“linux”目录下的文件和文件夹
输入“cd atk-mp1/回车”,切换到“atk-mp1”目录
输入“ls回车”,列出“atk-mp1”目录下的文件和文件夹
输入“cd linux/回车”,切换到“linux”目录
输入“ls回车”,列出“linux”目录下的文件和文件夹
输入“cd my_linux/回车”,切换到“my_linux”目录
输入“ls回车”,列出“my_linux”目录下的文件和文件夹
输入“cd linux-5.4.31/回车”,切换到“linux-5.4.31”目录
输入“ls回车”,列出“linux-5.4.31”目录下的文件和文件夹

2)、输入“cd arch/回车”,切换到“arch”目录
输入“ls回车”,列出“arch”目录下的文件和文件夹
输入“cd arm/回车”,切换到“arm”目录
输入“ls回车”,列出“arm”目录下的文件和文件夹
输入“cd boot/回车”,切换到“boot”目录
输入“ls回车”,列出“boot”目录下的文件和文件夹
输入“cd dts/回车”,切换到“dts”目录
输入“ls回车”,列出“dts”目录下的文件和文件夹
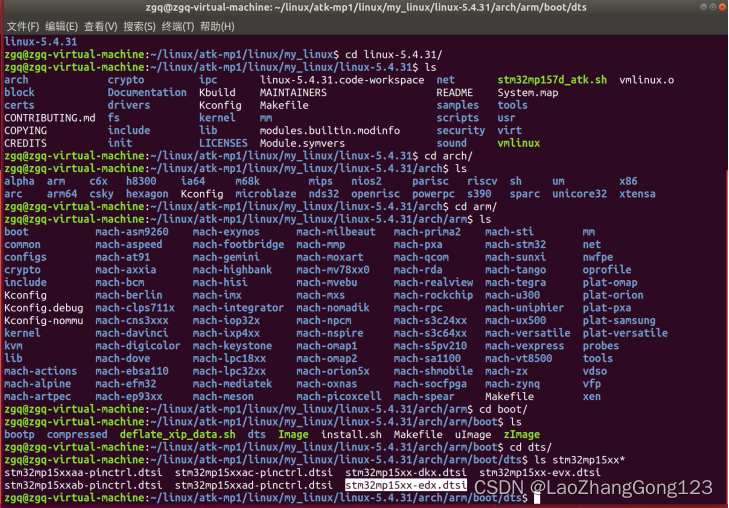
发现ST公司开发板的设备树头文件“stm32mp15xx-edx.dtsi”
3)、输入“cp stm32mp15xx-edx.dtsi stm32mp157d-atk.dtsi回车”,以“stm32mp15xx-edx.dtsi”为蓝本,复制一份,并命名为 “stm32mp157d-atk.dtsi”
输入“ls stm32mp157d-at*回车”
输入“cp stm32mp157d-ed1.dts stm32mp157d-atk.dts回车”,以“stm32mp157c-ed1.dts”为蓝本,复制一份,并命名为 “stm32mp157d-atk.dts”
输入“ls stm32mp157d-at*回车”

至此,设备树文件和头文件添加成功。
5、修改设备树文件“stm32mp157d-atk.dts”
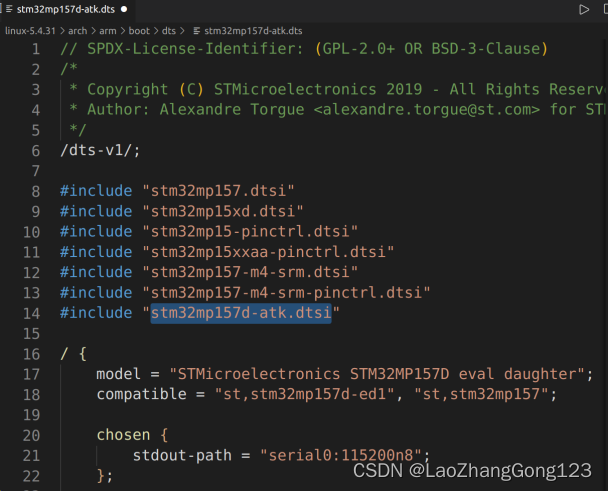
1)、使用VSCode打开“linux-5.4.31.code-workspace”,然后点击“arch”,点击“arm”,点击“boot”,点击“dts”,找到“stm32mp157d-atk.dts”,见下图:

2)、将“stm32mp15xx-edx.dtsi”修改为“stm32mp157d-atk.dtsi”,
见下图:
6、修改设备树头文件“stm32mp157d-atk.dtsi”
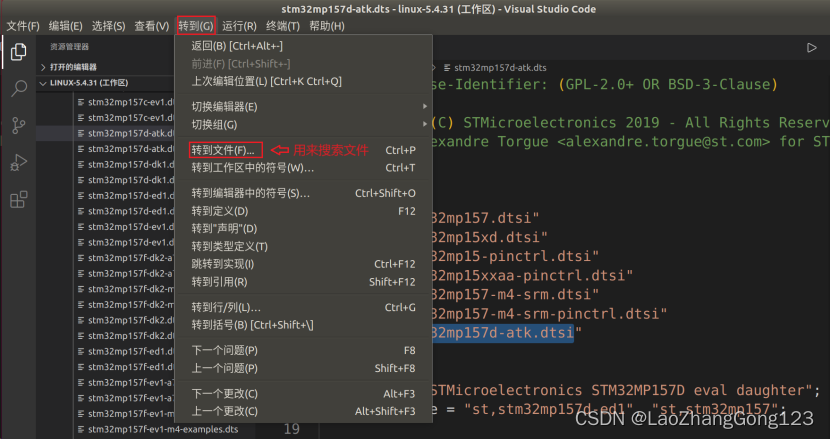
1)、使用VSCode打开“linux-5.4.31.code-workspace”
点击“转到”,点击“转到文件”,在搜索框中,输入“stm32mp157d-atk.dtsi”就可打开搜索到的文件;
见下图:
文件打开如下:

2)、添加头文件,内容如下:
#include "stm32mp157-m4-srm.dtsi"
#include "stm32mp157-m4-srm-pinctrl.dtsi"
见下图

3)、删除下面的“led”节点和“sd_switch”节点,见下图:

删除后,文件如下:
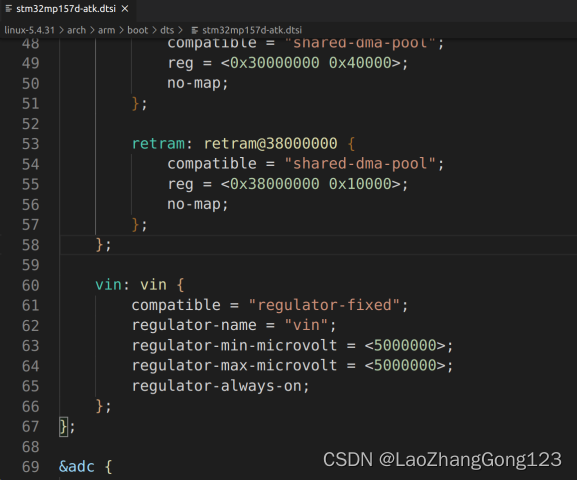
4)、删除下面的“vin”节点,见下图:
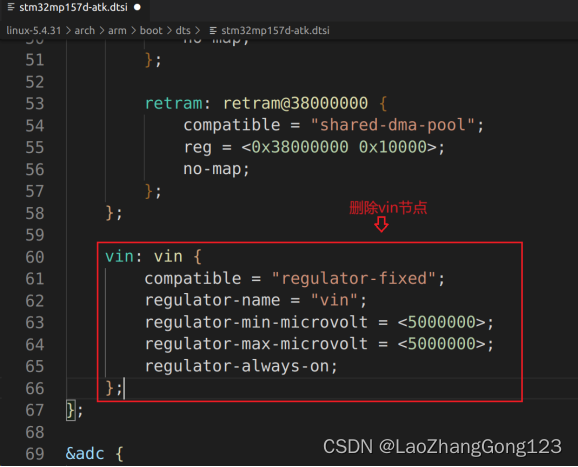
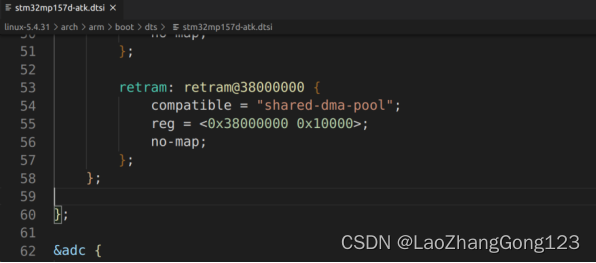
删除后,文件如下:
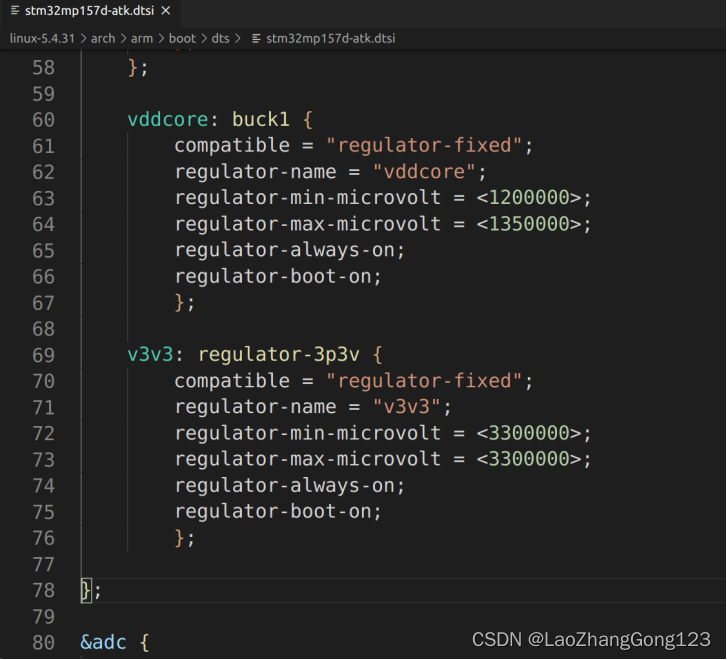
5)、在59行开始处,添加“vddcore”和“v3v3”
vddcore: buck1 {
compatible = "regulator-fixed";
regulator-name = "vddcore";
regulator-min-microvolt = <1200000>;
regulator-max-microvolt = <1350000>;
regulator-always-on;
regulator-boot-on;
};
v3v3: regulator-3p3v {
compatible = "regulator-fixed";
regulator-name = "v3v3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
};
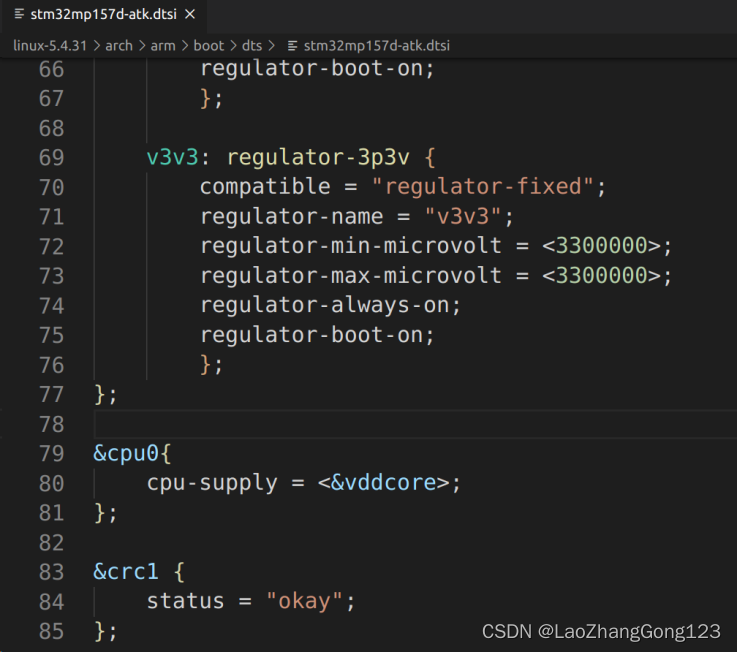
见下图:
6)、删除adc节点,见下图:

删除后,文件如下:
7)、删除dac节点

删除后文件如下:
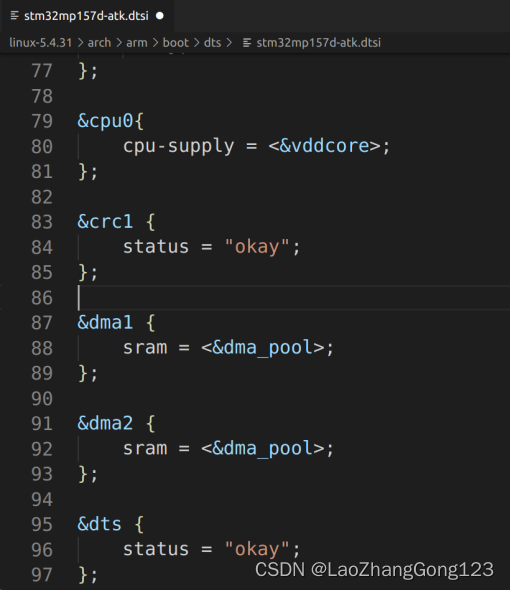
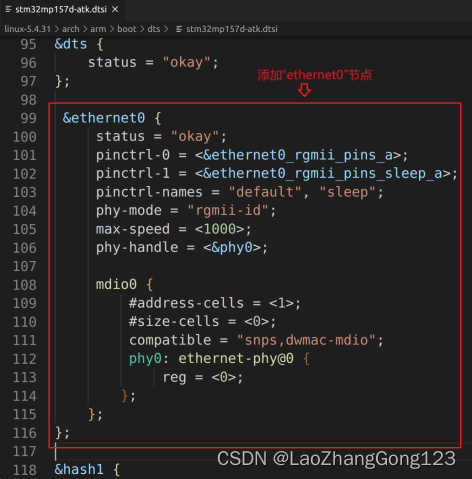
8)、添加“ethernet0”节点
ðernet0 {
status = "okay";
pinctrl-0 = <ðernet0_rgmii_pins_a>;
pinctrl-1 = <ðernet0_rgmii_pins_sleep_a>;
pinctrl-names = "default", "sleep";
phy-mode = "rgmii-id";
max-speed = <1000>;
phy-handle = <&phy0>;
mdio0 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "snps,dwmac-mdio";
phy0: ethernet-phy@0 {
reg = <0>;
};
};
};
添加“ethernet0”节点后,见下图:
9)、删除“i2c4”节点,删除后见下图:
10)、删除“m4_rproc”和“pwr_regulators”,见下图:
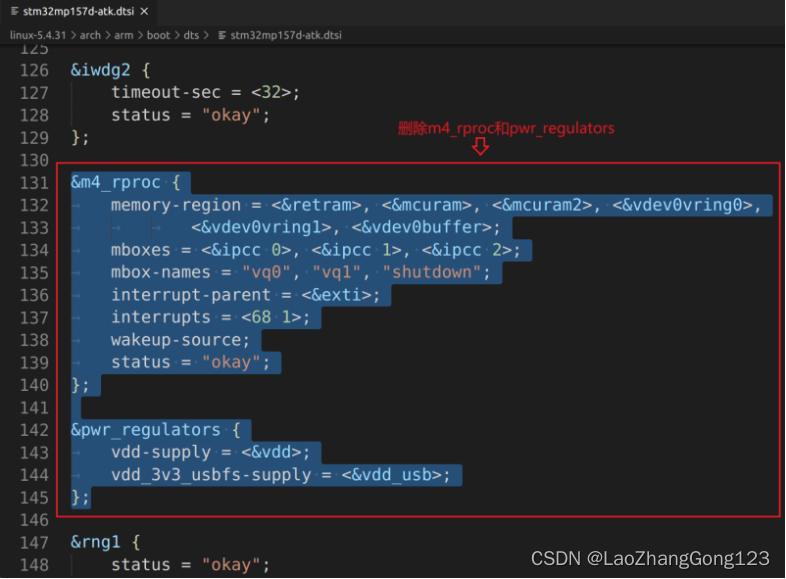
删除后,见下图:
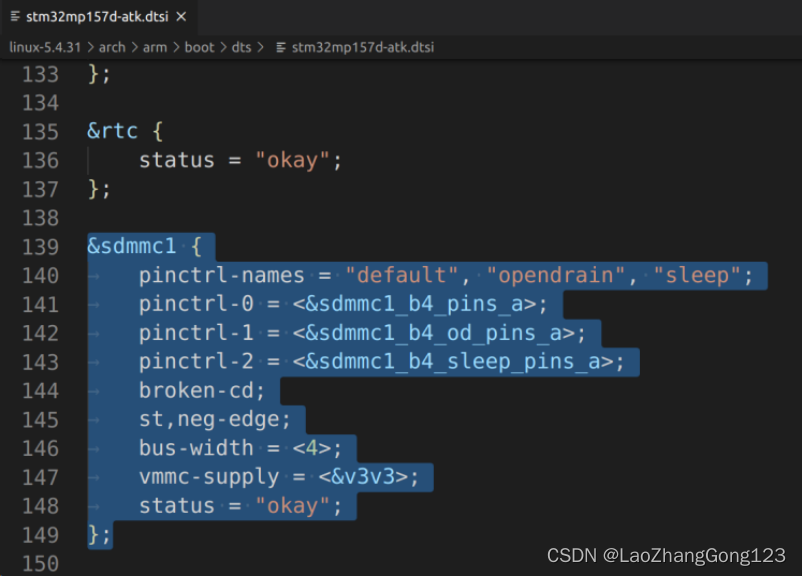
11)、使用下面的内容替换sdmmc1节点
&sdmmc1 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc1_b4_pins_a>;
pinctrl-1 = <&sdmmc1_b4_od_pins_a>;
pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;
broken-cd;
st,neg-edge;
bus-width = <4>;
vmmc-supply = <&v3v3>;
status = "okay";
};
替换sdmmc1节点后,见下图:
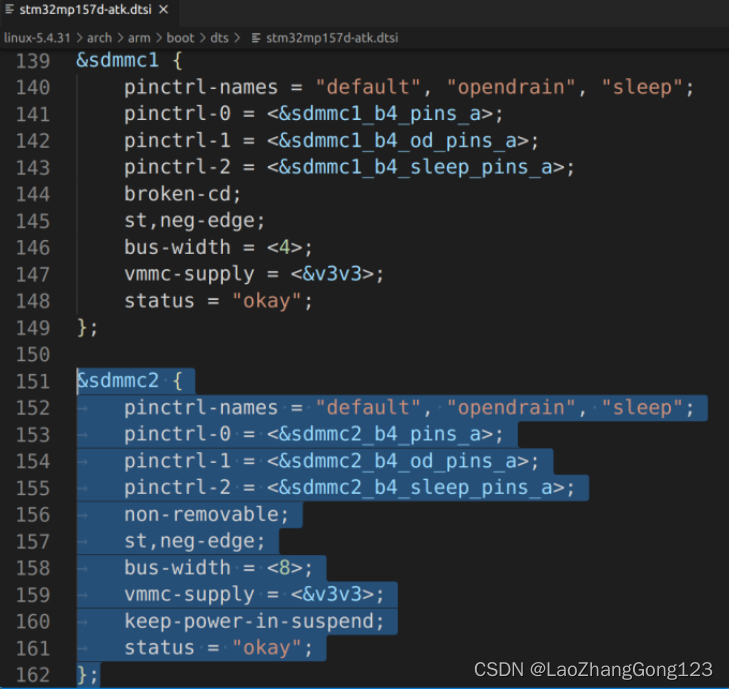
12)、使用下面的内容替换“sdmmc2”
&sdmmc2 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc2_b4_pins_a>;
pinctrl-1 = <&sdmmc2_b4_od_pins_a>;
pinctrl-2 = <&sdmmc2_b4_sleep_pins_a>;
non-removable;
st,neg-edge;
bus-width = <8>;
vmmc-supply = <&v3v3>;
keep-power-in-suspend;
status = "okay";
};
替换后,见下图:
13)、删除“timers6”节点

删除“timers6”节点后,见下图:
14)、删除“usbotg_hs”,“usbphyc_port0”和“usbphyc_port1”
/* Copyright (C) STMicroelectronics 2017 - All Rights Reserved
* Author: Ludovic Barre <ludovic.barre@st.com> for STMicroelectronics.
*/
#include "stm32mp157-m4-srm.dtsi"
#include "stm32mp157-m4-srm-pinctrl.dtsi"
#include <dt-bindings/gpio/gpio.h>
#include <dt-bindings/mfd/st,stpmic1.h>
/ {
memory@c0000000 {
device_type = "memory";
reg = <0xC0000000 0x40000000>;
};
reserved-memory {
#address-cells = <1>;
#size-cells = <1>;
ranges;
mcuram2: mcuram2@10000000 {
compatible = "shared-dma-pool";
reg = <0x10000000 0x40000>;
no-map;
};
vdev0vring0: vdev0vring0@10040000 {
compatible = "shared-dma-pool";
reg = <0x10040000 0x1000>;
no-map;
};
vdev0vring1: vdev0vring1@10041000 {
compatible = "shared-dma-pool";
reg = <0x10041000 0x1000>;
no-map;
};
vdev0buffer: vdev0buffer@10042000 {
compatible = "shared-dma-pool";
reg = <0x10042000 0x4000>;
no-map;
};
mcuram: mcuram@30000000 {
compatible = "shared-dma-pool";
reg = <0x30000000 0x40000>;
no-map;
};
retram: retram@38000000 {
compatible = "shared-dma-pool";
reg = <0x38000000 0x10000>;
no-map;
};
};
vddcore: buck1 {
compatible = "regulator-fixed";
regulator-name = "vddcore";
regulator-min-microvolt = <1200000>;
regulator-max-microvolt = <1350000>;
regulator-always-on;
regulator-boot-on;
};
v3v3: regulator-3p3v {
compatible = "regulator-fixed";
regulator-name = "v3v3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-always-on;
regulator-boot-on;
};
};
&cpu0{
cpu-supply = <&vddcore>;
};
&crc1 {
status = "okay";
};
&dma1 {
sram = <&dma_pool>;
};
&dma2 {
sram = <&dma_pool>;
};
&dts {
status = "okay";
};
ðernet0 {
status = "okay";
pinctrl-0 = <ðernet0_rgmii_pins_a>;
pinctrl-1 = <ðernet0_rgmii_pins_sleep_a>;
pinctrl-names = "default", "sleep";
phy-mode = "rgmii-id";
max-speed = <1000>;
phy-handle = <&phy0>;
mdio0 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "snps,dwmac-mdio";
phy0: ethernet-phy@0 {
reg = <0>;
};
};
};
&hash1 {
status = "okay";
};
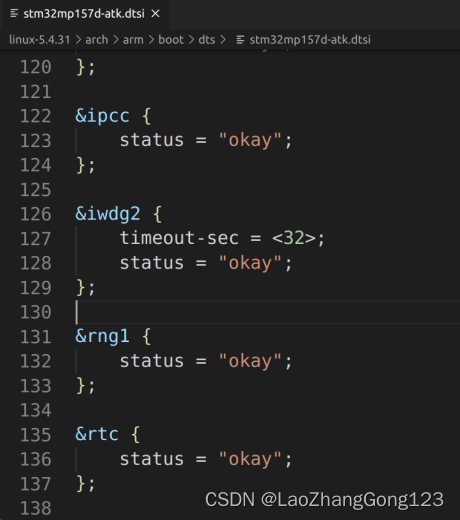
&ipcc {
status = "okay";
};
&iwdg2 {
timeout-sec = <32>;
status = "okay";
};
&rng1 {
status = "okay";
};
&rtc {
status = "okay";
};
&sdmmc1 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc1_b4_pins_a>;
pinctrl-1 = <&sdmmc1_b4_od_pins_a>;
pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;
broken-cd;
st,neg-edge;
bus-width = <4>;
vmmc-supply = <&v3v3>;
status = "okay";
};
&sdmmc2 {
pinctrl-names = "default", "opendrain", "sleep";
pinctrl-0 = <&sdmmc2_b4_pins_a>;
pinctrl-1 = <&sdmmc2_b4_od_pins_a>;
pinctrl-2 = <&sdmmc2_b4_sleep_pins_a>;
non-removable;
st,neg-edge;
bus-width = <8>;
vmmc-supply = <&v3v3>;
keep-power-in-suspend;
status = "okay";
};
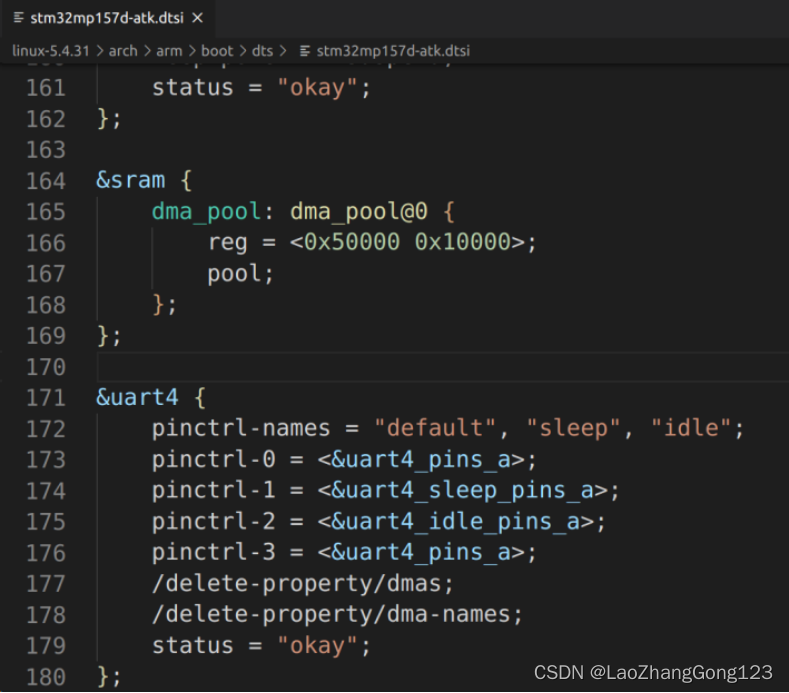
&sram {
dma_pool: dma_pool@0 {
reg = <0x50000 0x10000>;
pool;
};
};
&uart4 {
pinctrl-names = "default", "sleep", "idle";
pinctrl-0 = <&uart4_pins_a>;
pinctrl-1 = <&uart4_sleep_pins_a>;
pinctrl-2 = <&uart4_idle_pins_a>;
pinctrl-3 = <&uart4_pins_a>;
/delete-property/dmas;
/delete-property/dma-names;
status = "okay";
};
7、修改“arch/arm/boot/dts/”目录中的“Makefile”
1)、打开“arch/arm/boot/dts/Makefile”,找到“dtb-$(CONFIG_ARCH_STM32)”配置项。
2)、添加配置项“stmm32mp157d-atk.dtb”,修改后,见下图:
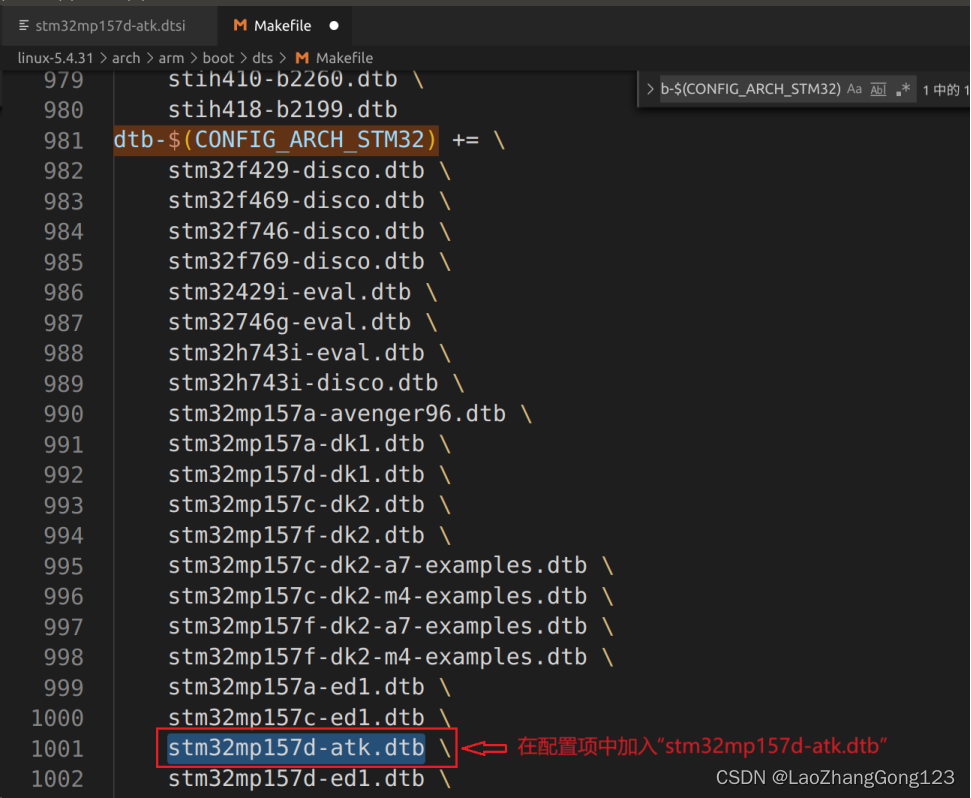
3)、保存“arch/arm/boot/dts/”目录中的“Makefile”。
相关文章:
Linux第51步_移植ST公司的linux内核第3步_添加修改设备树
1、设备树文件的路径 1)、创建linux中的设备树头文件 在“my_linux/linux-5.4.31/arch/arm/boot/dts/”目录中,以“stm32mp15xx-edx.dtsi”为蓝本,复制一份,并命名为 “stm32mp157d-atk.dtsi”,这就是我们开发板的设备树头文件。…...
统计操作)
【PyTorch】PyTorch中张量(Tensor)统计操作
PyTorch深度学习总结 第五章 PyTorch中张量(Tensor)统计操作 文章目录 PyTorch深度学习总结前言一、最值查找二、特殊值查询 前言 上文介绍了PyTorch中张量(Tensor)的计算操作,本文将介绍张量的统计操作。 一、最值查找 函数描述torch.max()找出张量中的最大值to…...
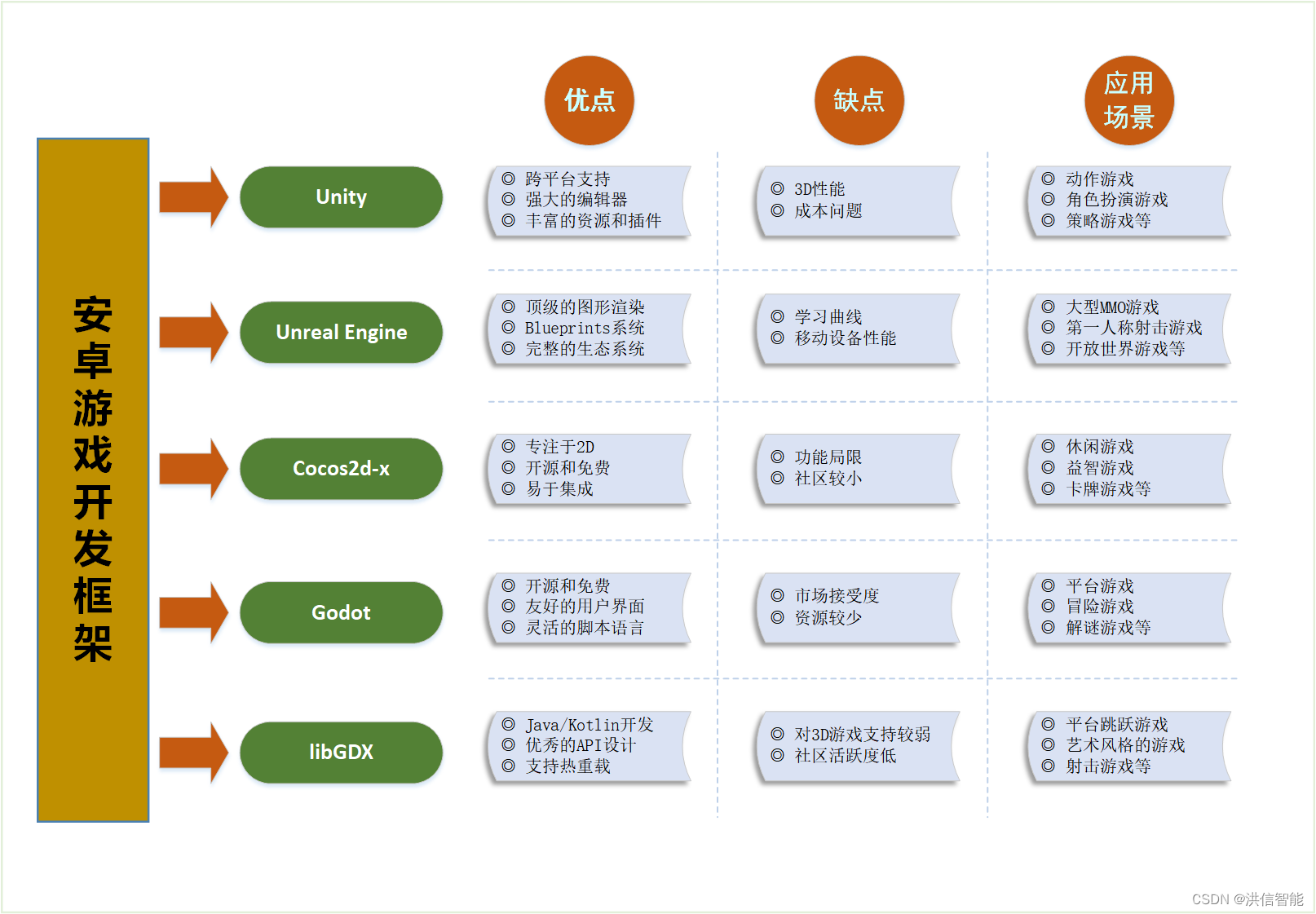
安卓游戏开发框架应用场景以及优劣分析
一、引言 在移动游戏开发领域,选择合适的开发框架是项目成功的关键因素之一。特别是对于安卓平台,由于其开放性和庞大的用户基础,不同的游戏开发框架应运而生,旨在帮助开发者高效地构建游戏应用。以下是一些流行的安卓游戏开发框架…...
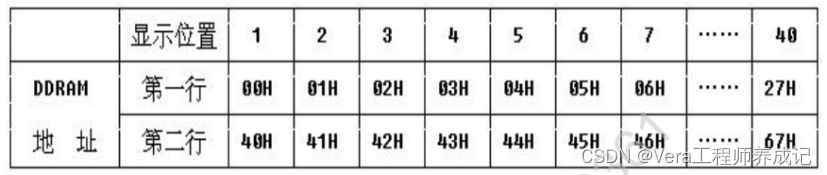
单片机学习笔记---LCD1602
LCD1602介绍 LCD1602(Liquid Crystal Display)液晶显示屏是一种字符型液晶显示模块,可以显示ASCII码的标准字符和其它的一些内置特殊字符(比如日文的片假名),还可以有8个自定义字符 显示容量:…...

django中实现适配器模式
在Django中实现适配器模式(Adapter Pattern)涉及到创建一个适配器类,它允许不兼容的接口之间进行交互。适配器模式通常用于将一个类的接口转换为另一个客户端期望的接口。 一:实现例子 下面是一个简单的例子,演示如何…...
--EXCEL排序)
题记(42)--EXCEL排序
目录 一、题目内容 二、输入描述 三、输出描述 四、输入输出示例 五、完整C语言代码 一、题目内容 Excel可以对一组纪录按任意指定列排序。现请你编写程序实现类似功能。 对每个测试用例,首先输出1行“Case i:”,其中 i 是测试用例的编号&#…...

【学网攻】 第(28)节 -- OSPF虚链路
系列文章目录 目录 系列文章目录 文章目录 前言 一、什么是OSPF虚链路? 二、实验 1.引入 实验目标 实验背景 技术原理 实验步骤 实验设备 实验拓扑图 实验配置 扩展 实验拓扑图 实验配置 实验验证 文章目录 【学网攻】 第(1)节 -- 认识网络【学网攻…...
百面嵌入式专栏(面试题)驱动开发面试题汇总1.0
沉淀、分享、成长,让自己和他人都能有所收获!😄 📢本篇我们将介绍驱动开发面试题 。 1、Linux驱动程序的功能是什么? 对设备初始化和释放。进行内核与硬件的数据交互。检测和处理设备出现的错误。2、内核程序中申请内存使用什么函数? 答案:kmalloc()、kzalloc()、vm…...

Starknet 的 JavaScript 库:Starknet.js、get-starknet和starknet-react
文章目录 Starknet 的 JavaScript 库Starknet.jsget-starknetstarknet-reactStarknet 的 JavaScript 库Starknet.js 官方:https://www.starknetjs.com/ Starknet.js 是一个与 Starknet 交互的 JavaScript 库,通常以脚本或去中心化形式进行交互应用程序。 Starknet.js 的灵感…...
)
debian11 安装 k8s,containerd ,阿里云镜像(已成功)
1. 环境准备 系统要求:至少 2GB RAM(建议 4GB 或更多),网络连接。 节点准备:至少 3 台机器,1 台作为 Master 节点,2 台作为 Worker 节点。 安装sudo apt update apt install sudo设置主机名&a…...

Spring Task定时任务
目录 1、介绍 2、cron表达式 2.1、在线生成器 2.2、通配符 3、代码示例 3.1、使用步骤 3.2、 代码开发 3.3、测试 🍃作者介绍:双非本科大三网络工程专业在读,阿里云专家博主,专注于Java领域学习,擅长web应用开发…...

【设计模式】23中设计模式笔记
设计模式分类 模板方法模式 核心就是设计一个部分抽象类。 这个类具有少量具体的方法,和大量抽象的方法,具体的方法是为外界提供服务的点,具体方法中定义了抽象方法的执行序列 装饰器模式 现在有一个对象A,希望A的a方法被修饰 …...

类加载过程介绍
一、类的生命周期 类被加载到jvm虚拟机内存开始,到卸载出内存为止,他的生命周期可以分为:加载->验证->准备->解析->初始化->使用->卸载。 其中验证、准备、解析统一称为链接阶段 1、加载 将类的字节码载入方法区中…...

pytorch创建模型方式
1.继承自nn.Module的方式 from torch import nn import torch.nn.functional as F 继承自nn.Moduleclass LModel(nn.Module):def __init__(self):super().__init__()self.L1 nn.Linear(10,10)self.L2 nn.Linear(10,64)self.L3 nn.Linear(64,10)self.L4 nn.Linear(10,5)se…...
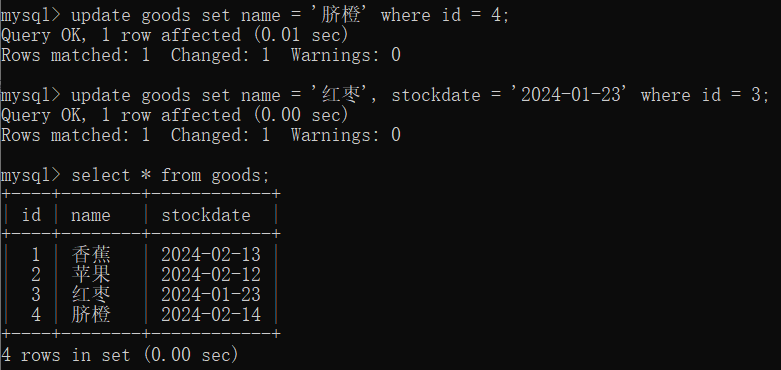
MySQL 基础知识(五)之数据增删改
目录 1 插入数据 2 删除数据 3 更改数据 创建 goods 表 drop table if exists goods; create table goods ( id int(10) primary key auto_increment, name varchar(14) unique, stockdate date )charsetutf8; 1 插入数据 当要插入的数据为日期/时间类型时,如果…...

紫微斗数双星组合:廉贞天府在辰戌
文章目录 前言内容总结 前言 紫微斗数双星组合:廉贞天府在辰戌 内容 紫微斗数双星组合:廉贞天府在辰戌 性格分析 廉贞天府同坐辰、戌宫,若无煞星冲破,为“天府朝垣格”,也为“府相朝垣格”,富贵双全&am…...

人工智能|深度学习——基于全局注意力的改进YOLOv7-AC的水下场景目标检测系统
代码下载: 基于全局注意力的改进YOLOv7-AC的水下场景目标检测系统.zip资源-CSDN文库 1.研究的背景 水下场景目标检测是水下机器人、水下无人机和水下监控等领域中的重要任务之一。然而,由于水下环境的复杂性和特殊性,水下目标检测面临着许多挑…...
:最简CPU)
使用 C++23 从零实现 RISC-V 模拟器(1):最简CPU
👉🏻 文章汇总「从零实现模拟器、操作系统、数据库、编译器…」:https://okaitserrj.feishu.cn/docx/R4tCdkEbsoFGnuxbho4cgW2Yntc 本节实现一个最简的 CPU ,最终能够解析 add 和 addi 两个指令。如果对计算机组成原理已经有所了…...
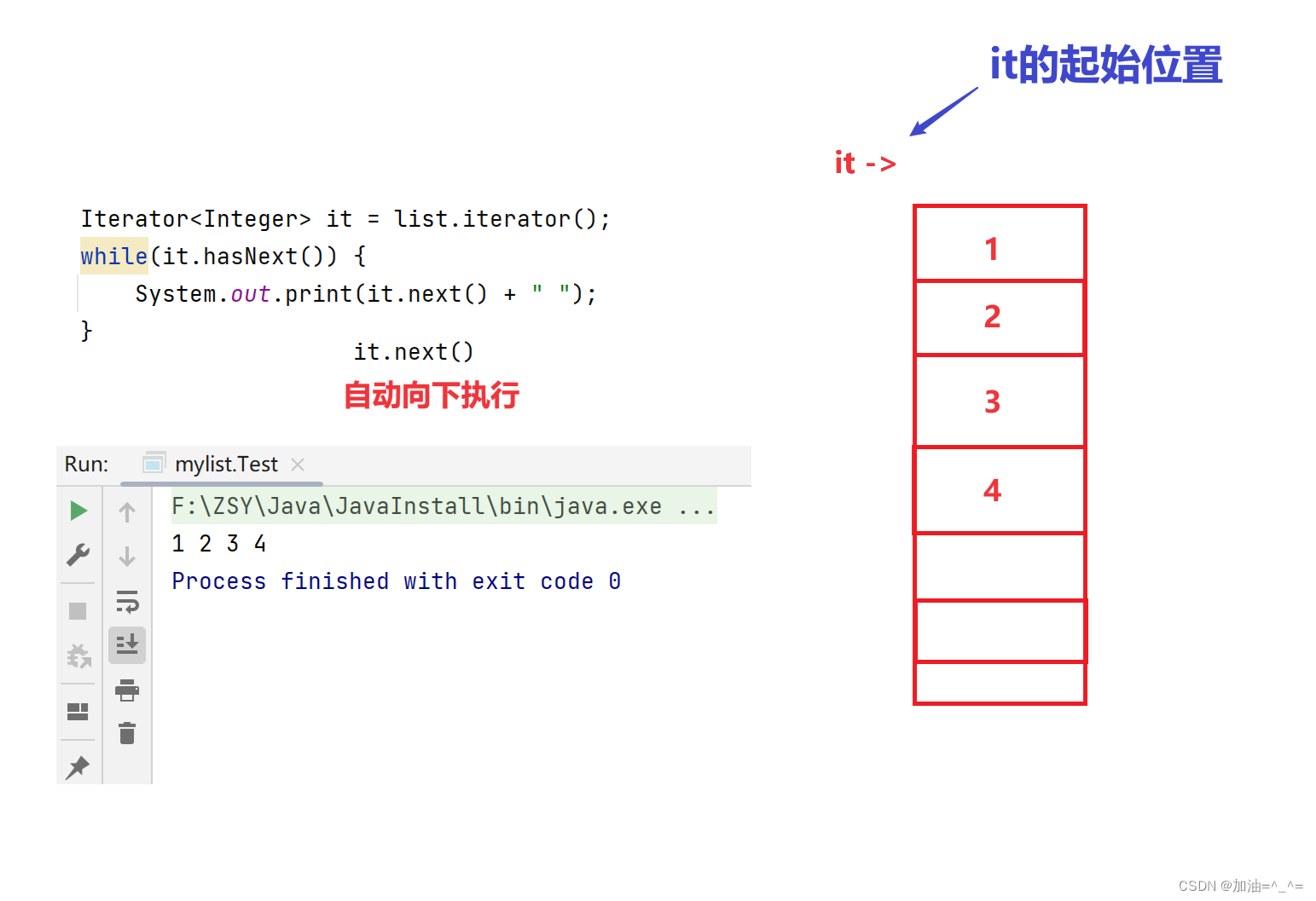
顺序表、链表(ArrayList、LinkedList)
目录 前言: 顺序表(ArrayList): 顺序表的原理: ArrayList源码: 的含义:编辑 ArrayList的相关方法:编辑 向上转型List: 练习题(杨辉三角&#x…...

第11讲投票创建后端实现
投票创建页面实现 文件选择上传组件 uni-file-picker 扩展组件 安装 https://ext.dcloud.net.cn/plugin?nameuni-file-picker 日期选择器uni-datetime-picker组件 安装 https://ext.dcloud.net.cn/plugin?nameuni-datetime-picker iconfont小图标 https://www.iconfont…...

Pearcleaner:macOS应用彻底清理的终极免费解决方案
Pearcleaner:macOS应用彻底清理的终极免费解决方案 【免费下载链接】Pearcleaner A free, source-available and fair-code licensed mac app cleaner 项目地址: https://gitcode.com/gh_mirrors/pe/Pearcleaner 你是否曾经遇到过这样的烦恼:在Ma…...

实战复盘:我们如何定位并彻底解决Spring Gateway的‘262144字节’缓冲区限制问题
深度解析:Spring Gateway缓冲区限制问题的工程化解决方案 1. 问题背景与现象分析 去年夏天,我们的电商平台在促销活动期间突然遭遇了一系列诡异的API请求失败。前端团队报告称,部分包含大型商品列表的JSON请求在通过Spring Cloud Gateway时被…...

让旧款iPhone/iPad重获新生:Legacy-iOS-Kit终极使用指南
让旧款iPhone/iPad重获新生:Legacy-iOS-Kit终极使用指南 【免费下载链接】Legacy-iOS-Kit An all-in-one tool to restore/downgrade, save SHSH blobs, jailbreak legacy iOS devices, and more 项目地址: https://gitcode.com/gh_mirrors/le/Legacy-iOS-Kit …...
)
别再全局搜组件了!React Developer Tools 这 3 招定位文件(含 VSCode 自动跳转配置)
高效定位React组件的3种专业工作流 在接手一个大型React项目时,最令人头疼的莫过于在数百个文件中寻找特定组件的定义和使用位置。传统的全局搜索方法不仅效率低下,还容易因命名冲突导致误判。本文将分享三种经过实战验证的高效定位方法,特别…...

B站视频转文字终极指南:5分钟掌握高效知识管理神器
B站视频转文字终极指南:5分钟掌握高效知识管理神器 【免费下载链接】bili2text Bilibili视频转文字,一步到位,输入链接即可使用 项目地址: https://gitcode.com/gh_mirrors/bi/bili2text 你是否曾为了一段精彩的B站课程内容࿰…...

别再只会用menuconfig了!手把手教你为ESP32项目定制专属Kconfig配置菜单
从配置使用者到设计者:ESP32项目中的Kconfig高级定制指南 在ESP-IDF开发环境中,menuconfig几乎是每个开发者每天都要接触的工具。但大多数开发者仅仅停留在"使用者"层面——他们知道如何勾选选项、调整参数,却很少思考这些配置菜单…...
)
别再为调试发愁!FreeRTOS下STM32串口打印的三种实用方案(含USART3重定向避坑)
FreeRTOS下STM32串口调试的三大实战方案与深度优化指南 在嵌入式开发中,调试信息的输出如同黑夜中的灯塔,为开发者指明程序运行的轨迹。当FreeRTOS遇上STM32,串口打印这个看似基础的功能却可能成为项目推进的绊脚石。本文将带您深入探索三种经…...

第1章:AI Agent认知与全景图
本章你将收获:AI Agent的核心概念与演变历程;主流框架(LangChain、AutoGPT、CrewAI)的深度对比与选型指南;5个真实Agent应用案例的拆解;一套评估项目是否需要引入Agent的决策方法论;以及可运行的Agent代码示例(含免费API)。 📌 本章导读 2024年以来,“AI Agent”成…...

硬件安全漏洞披露与静态侧信道攻击防御实践
1. 漏洞披露流程与行业实践在硬件安全研究领域,负责任披露(Responsible Disclosure)是研究人员发现关键漏洞后的标准操作流程。以我们团队发现的AMD和Microchip芯片漏洞为例,完整披露过程通常包含以下关键阶段:漏洞确认…...

GPU缓存架构优化与AI加速器内存技术解析
1. GPU缓存架构与AI加速器的内存挑战在AI计算领域,内存子系统已成为制约性能提升的关键瓶颈。传统GPU采用的多级缓存架构(L1/L2/L3)虽然能有效缓解"内存墙"问题,但随着Transformer等大模型参数量呈指数级增长࿰…...