蓝桥杯电子类单片机提升一——超声波测距
前言
单片机资源数据包_2023
一、超声波测距原理
二、超声波测距的应用
1.超声波的发射
2.单片机知识补充:定时器
3.超声波的接收与计时
4.距离的计算
1)定时器1为16位自动重载+1T@11.0592MHz
2)定时器1为16位自动重载+12T@11.0592MHz
3)定时器1为16位自动重载+1T@12MHz
4)定时器1为16位自动重载+12T@11.0592MHz
总结
5.代码完善
三、完整代码展示
前言
关于蓝桥杯比赛时会提供的资料前几篇都有提到,这里就不在赘述了,只放一个下载链接:
单片机资源数据包_2023
除了基础部分的按键、LED灯,数码管扫描,还有温度传感器,AD/DA转化,EEPROM存储器,RTC之外,还有三个模块考试的时候可能会考,分别是超声波,NE555和串口。近几年的题也是越来越难,这三个模块也逐渐出现在了省赛的舞台上(当然如果进国赛了,这几个模块就都可能考了)。提升篇主要针对这三个模块进行介绍。
由于这三个模块比赛时不会提供底层代码,所以许多都需要咱们自己来完成,所以不同人写的代码,差异性可能会更大。此外这些代码会涉及到单片机运行的底层知识,关于单片机基础部分的内容,提升篇也会尽可能介绍一部分(当然如果你不会也没关系,文章会教你如何用stc生成或者查数据手册,就算不知道原理,小背一背也是能自己实现的)
一、超声波测距原理
超声波测距的原理很简单,就是超声波发送装置先发送一段超声波,然后开始计时,一直等到接收端接收到反射回来的超声波,然后停止计时。记录的这段时间T,就是超声波碰到物体在返回的时间,超声波的速度一般取340m/s,那么物体距离超声波测距装置的距离S=V*T/2.很好理解,这里就不在画图进行过多介绍了。
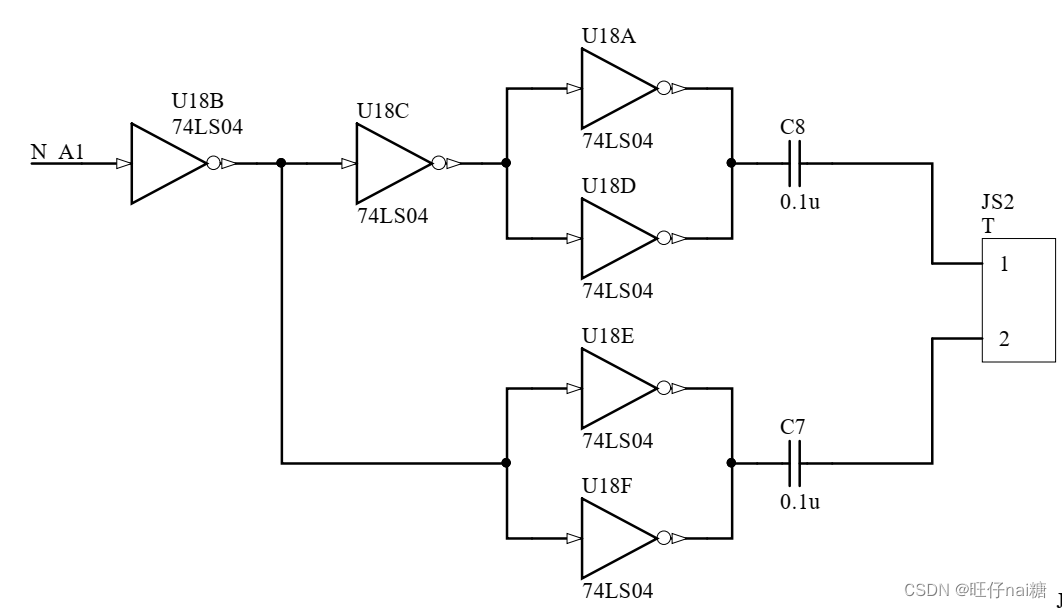
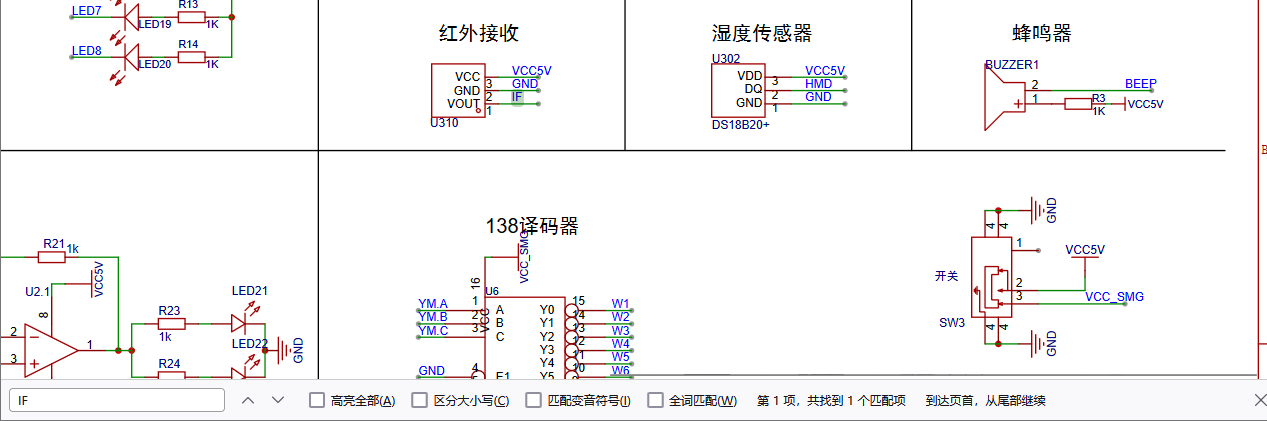
发射
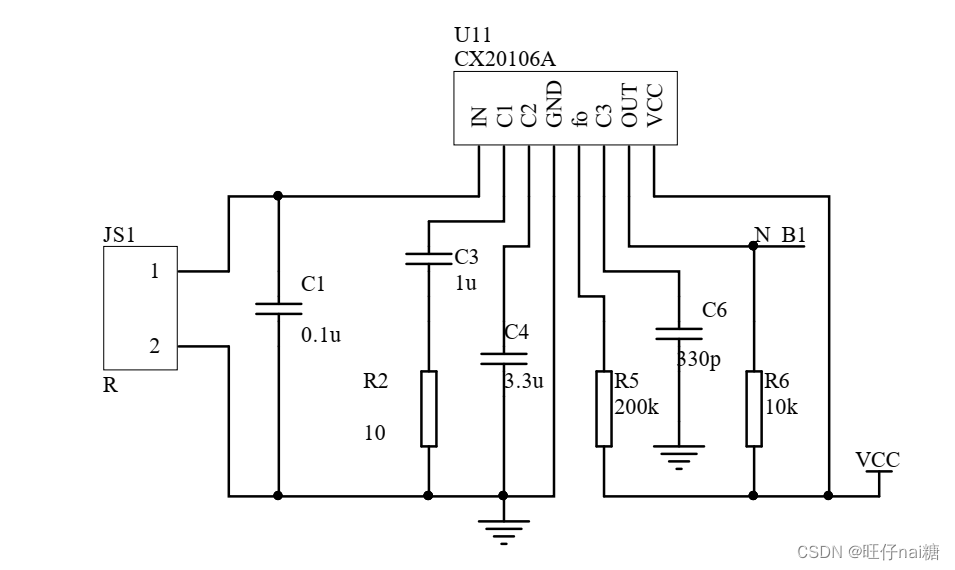 接收
接收
这两张分别是在原理图上的超声波发射和接收电路,这里也不过多介绍。
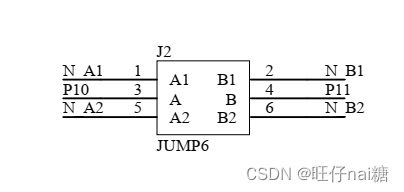
在使用超声波之前,我们需要正确配置跳线帽。 也就是将J2 2x3的排针的A1和A相连,B1与B相连,这样超声波发送端就与P10相连了,接收端就与P11相连了。换言之,超声波的数据发送引脚TX=P10;数据接收引脚RX=P11。
二、超声波测距的应用
第一章已经介绍了超声波测距的原理,无非是发送,计时,接收信号+数据处理(把时间信息转化为距离信息),接下来咱们一一实现着三个步骤
1.超声波的发射
超声波的发送,就是需要我们通过TX引脚发送8个40KHz的超声波信号(具体为什么测距需要用40KHz的超声波,可以自行百度)。
我们知道,40KHz的信号,一个周期就是25微秒,那半个周期就约13us。理论上我们只需让TX置为1,然后延时13us,然后在让TX置为0,再延时13us就完成了一个40KHz信号的发射。放在一个for循环内,即可完成发送8个40KHz的信号。
但是,实际在用的时候,延时13us往往不够,难以读取到有效的数据(当然,读者可以自行测试,也就修改一个延时函数的功夫),这里把延时改为14us,如果读取的数据仍旧存在问题,如突然跳到一个特别大的值,然后又突然回归正常等,我们可以适当增加延时。对应到代码上的话,我们可以通过微调Delay14us内的i的值,来增大延时,下面是发送TX与RX的引脚定义与发送超声波的代码:
sbit TX=P1^0;
sbit RX=P1^1;void Delay14us(void) //@11.0592MHz
{
unsigned char data i;_nop_();
i = 45;//11.0592MHz的单片机,使用stc生成14us延时时,i等于36,这里稍微增大了i让延时增大
while (--i);
}
void send_wave(void)//发送超声波的函数
{
unsigned char i=0;
for(i=0;i<8;i++)//发送8个40KHz的超声波
{
TX=1;Delay14us();
TX=0;Delay14us();
}
}
2.单片机知识补充:定时器
在进行第二步:计时之前,需要先“科普”一下51系列单片机的基础知识。
单片机的数据手册可以通过新版的STC-ISP下载,或者点击下边的蓝字进行下载/查看
STC15用户手册(点击查看或下载)
对于15单片机的定时器,也有许多,这里只挑对于超声波有用的寄存器讲。
这有一段STC-ISP生成的代码,系统频率为11.0592MHz,定时器1,定时长度为1ms,定时器模式为16位自动重,时钟频率为1T的定时器1的初始化代码
void Timer1_Init(void) //1毫秒@11.0592MHz
{
AUXR |= 0x40; //定时器时钟1T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0xCD; //设置定时初始值
TH1 = 0xD4; //设置定时初始值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
}
首先先解释一下为什么是定时器1,而不是定时器0呢,因为定时器0我们在比赛时百分百要用到,而其他定时器,或者说需不需要额外的定时器则是需要根据题目要求来判定,所以我们定时器0里面有我们需要运行的代码,我们可以开一个单独的定时器1来完成超声波,注意,超声波检查需要一个单独的定时器。
然后我们再看代码,第一行AUXR是辅助寄存器,用于控制时钟是1T还是12T,这个1T就是指不分频或者说1倍分频,12T就是指12分频。数据手册上也有,但是我们可以直接用STC-ISP来生成1T或者12T的代码,就不在赘述了。
对于第二行TMOD寄存器是用来控制定时器模式的,定时器主要有定时和计数功能。
定时就是我们经常使用的模式,计数器模式我们在NE555会用到。而在超声波测距时,我们恰恰是需要定时器去计时。
定时模式又有16位自动重载,16位自动重载,8位自动重载等模式(注意,不是所有8051系列单片机都有这些模式的),我们一般用16位自动重载,自动重载的意思就是,定时器溢出之后(定时器中断),定时器的TL和TH值会自动重新变为初始值,而不需要代码重置。
TL1 = 0xCD; //设置定时初始值
TH1 = 0xD4; //设置定时初始值
这两个就是刚才提到的TL和TH,这里是定时器1的TL和TH,所以是TL1和TH1,两个都是8位二进制数,合在一块刚好是16位二进制,其中,TH1是高八位,TL1是低八位,定时器开始计数时,他们就会自增1,直到溢出。根据它俩的初始值不同,我们可以设置出不同时间长度的定时器。
当定时器的TH1和TL1溢出时,TF1就会被置为1,同时引起定时器中断(当然前提是允许中断)。
当TR1=1时,定时器开始计时,TR1=0时,定时器停止计时。
综上,如果我们想用定时器1计时的话,就不能一开始就开启定时器计时,需要等我们发送完超声波之后再开始计时,也就是令TR1 =1,并且需要先将 TL1和TH1置为0,这样方便我们计算。等接收到信号之后,我们需要将TR1置为0停止计时,此时TH1和TL1存的数据,就是从开始计时到结束计时这一段的时间了,当然这个时间的单位可不是s呦。除此之外,如果长时间没有收到返回的超声波信号,一直等到TH1和TL1从0累加到溢出,也就是使TF1=1了,那说明没有检测到有效信号,我们也需要进行单独处理。
3.超声波的接收与计时
当发送完超声波之后,我们立即开始计时。当超声波接收端RX检测到信号时,会被置为1,也就是当检测到RX为1时,说明检测到超声波返回的信号了,我们也立刻停止计时,这段时间ultar_t就是超声波从发生到反射回来的时间,也就是超声波走了一个来回的时间。接下来,我们用代码来实现这个功能:
send_wave();
TR1=1;//开始计时
while((RX==1)&&(TF1==0));//计时的条件:没有收到反射回来的超声波,且定时器没有溢出
TR1=0;//停止计时
if(TF1==1)//定时器溢出,说明在一段时间内没收到反射回的超声波(代码/硬件/真的是因为距离太远都有可能导致没收到信号)
{
TF1=0;
ultar_t=0;//这个值可以随意设置,总之就是如果没有接收到反射回来的超声波时,要如何显示的值。。这里是接收到反射回来的超声波,就显示0
}
else//跳出那个while循环,不是因为TF1=1了,就是因为RX=0了,这个else的情况就是RX=0;也可以写成else if(RX==0);
{
ultar_t=TH1;
ultar_t<<=8;
ultar_t|=TL1;
}
注意这里对TF1=1的情况也进行了处理,也就是没检测到信号的情况。
4.距离的计算
我们已经求得了时间ultar_t,但是这个时间的单位不是S也不是ms等,需要先进行转化成真正的时间才能用于距离的计算,关于距离的计算又涉及到了单片机的知识,这里根据单片机设置的频率不同和定时器时钟模式不同分开介绍。
1)定时器1为16位自动重载+1T@11.0592MHz
void Timer1_Init(void) //@11.0592MHz
{
AUXR |= 0x40; //定时器时钟1T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x00; //设置定时初始值
TH1 = 0x00; //设置定时初始值
TF1 = 0; //清除TF1标志
//TR1 = 1; //定时器1开始计时
}
实际的时间=ultar_t*1/11059200(秒)
距离remote=ultar_t*1/11059200*340*100/2(厘米)
2)定时器1为16位自动重载+12T@11.0592MHz
void Timer1_Init(void) //1微秒@11.0592MHz
{
AUXR |= 0xBF; //定时器时钟1T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x00; //设置定时初始值
TH1 = 0x00; //设置定时初始值
TF1 = 0; //清除TF1标志
//TR1 = 1; //定时器1开始计时
}
实际的时间=ultar_t*1/11059200*12(秒)
距离remote=ultar_t*1/11059200*12*340*100/2(厘米)
3)定时器1为16位自动重载+1T@12MHz
初始化函数与1)相同
实际的时间=ultar_t*1/12000000*12(秒)
距离remote=ultar_t*1/12000000*12*340*100/2(厘米)
4)定时器1为16位自动重载+12T@11.0592MHz
初始化函数与2)相同
实际的时间=ultar_t*1/12000000*12(秒)
距离remote=ultar_t*1/12000000*12*340*100/2(厘米)
总结
实际的距离等于ultar_t*1/主频*分频倍数*340*100/2(厘米)
对于1T和12T,12T就是十二分频,简单点说就是定时器记录的最长时间变为1T的十二倍,同时精度也变为原来的12倍,但是其实1T模式下,最远检测的距离等于65535*1/11059200*340*100/2≈100cm,100cm已经很远了,我用这个超声波时,测到70就已经很难了,所以一般情况下1T模式,而且不对超过100cm进行处理,也足够了。
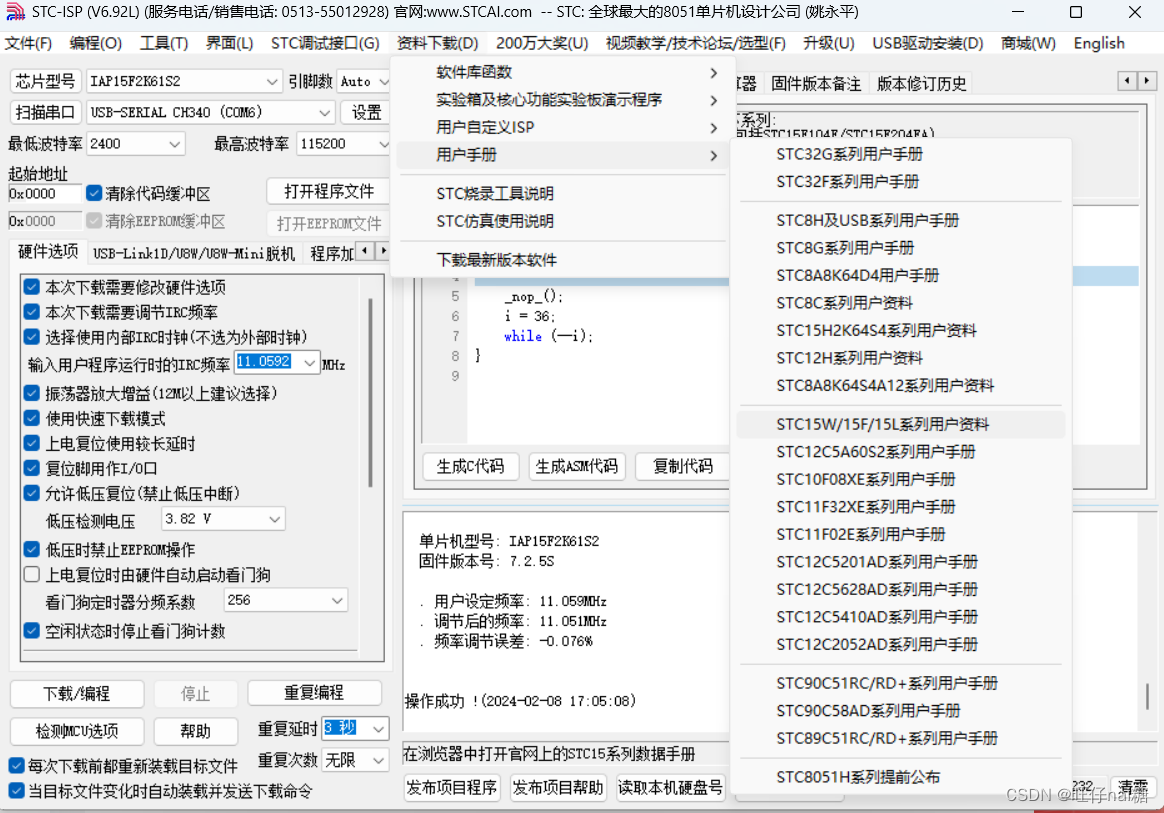
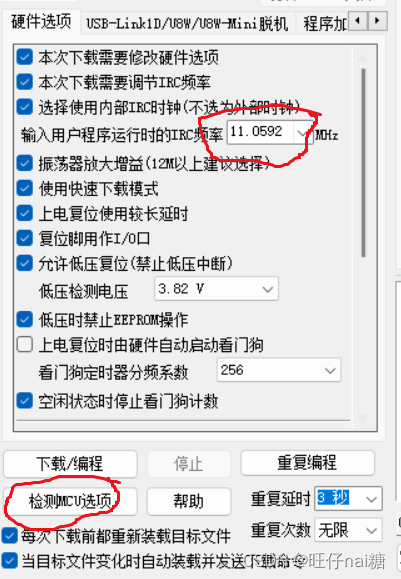
对于主频率,比赛的时候,有时候会要求使用12MHz的主频(近几年来,可谓是大概率会这样要求),我们需要通过isp更改单片机内部的设置。关于主频的设置,我们只需在下载程序之前调一下IRC频率,下载程序之后会把单片机内部的设置一同更改了。我们也可以使用“检测MCU”选项,检测当前单片机内部的一些设置。
5.代码完善
与LED灯闪烁类似,我们并不期望无时无刻地发送与接收,而是每隔一定时间发送接受一次,再加上刚才关于距离计算的代码,以及每轮之后将相关数据清空,我们可以总结出超声波测距过程的代码:
if(count_ultar==1)
{
count_ultar=0;
send_wave();
TR1=1;//开始计时
while((RX==1)&&(TF1==0));//计时的条件:没有收到反射回来的超声波,且定时器没有溢出
TR1=0;//停止计时
if(TF1==1)//定时器溢出,说明在一段时间内没收到反射回的超声波(代码/硬件/真的是因为距离太远都有可能导致没收到信号)
{
TF1=0;
ultar_t=0;//这个值可以随意设置,总之就是如果没有接收到反射回来的超声波时,要如何显示的值。。这里是接收到反射回来的超声波,就显示0
}
else//跳出那个while循环,不是因为TF1=1了,就是因为RX=0了,这个else的情况就是RX=0;也可以写成else if(RX==0);
{
ultar_t=TH1;
ultar_t<<=8;
ultar_t|=TL1;
}remote=(unsigned int)(ultar_t*0.0015);//定时器1是1T。注意需要修改Timer1_Init()内的内容
//remote=(unsigned int)(ultar_t*0.0184);//定时器1是12T
ultar_t=0;
TH1=0;
TL1=0;
}Delay100ms();
}
count_ultar为0时,200ms之后会被定时器置为1,也就是每200ms发送接收一次超声波。
unsigned int ultar_t=0;
bit count_ultar=0;
void Timer0_Isr(void) interrupt 1
{
if(count_ultar==0)
{
if(++count_200>200)
{
count_ultar=1;
count_200=0;
}}
三、完整代码展示
现在,完成以下功能对刚才介绍的功能进行演示:
1.单片机主频率设置为11.0592MHz
2.通过超声波读取距离信息,并显示到前三位数码管上,单位:CM
main.c
#include <stc15.h>
#include <intrins.h>code unsigned char Seg_Table[] =
{
0xc0, //0
0xf9, //1
0xa4, //2
0xb0, //3
0x99, //4
0x92, //5
0x82, //6
0xf8, //7
0x80, //8
0x90, //9
0xFF
};#define NIXIE_CHECK() P2|=0xC0;P2&=0xDF;P2&=0x1F;
#define NIXIE_ON() P2|=0xE0;P2&=0xFF;P2&=0x1F;void Timer0_Init(void); //1毫秒@11.0592MHz
void Delay100ms(void); //@11.0592MHz
void send_wave(void);
void Timer1_Init(void); //1毫秒@11.0592MHzunsigned char location=0;
unsigned char Nixie_num[]={10,10,10,10,10,10,10,10};
bit count_ultar=0;//时间标志位
unsigned int remote=0;//距离信息
unsigned int ultar_t=0;//超声波往返的时间信息,注意必须用uint,不能用uchar
sbit TX=P1^0;//定义超声波的TX
sbit RX=P1^1;//定义超声波的RX
void main()
{Timer0_Init();Timer1_Init();EA=1;Delay100ms();while(1){if(count_ultar==1){count_ultar=0;send_wave();TR1=1;//开始计时while((RX==1)&&(TF1==0));//计时的条件:没有收到反射回来的超声波,且定时器没有溢出TR1=0;//停止计时if(TF1==1)//定时器溢出,说明在一段时间内没收到反射回的超声波(代码/硬件/真的是因为距离太远都有可能导致没收到信号){TF1=0;ultar_t=0;//这个值可以随意设置,总之就是如果没有接收到反射回来的超声波时,要如何显示的值。。这里是接收到反射回来的超声波,就显示0}else//跳出那个while循环,不是因为TF1=1了,就是因为RX=0了,这个else的情况就是RX=0;也可以写成else if(RX==0);{ultar_t=TH1;ultar_t<<=8;ultar_t|=TL1;}remote=(unsigned int)(ultar_t*0.0015);//定时器1是1T。注意需要修改Timer1_Init()内的内容//remote=(unsigned int)(ultar_t*0.0184);//定时器1是12Tultar_t=0;TH1=0;TL1=0;}//数码管显示距离信息Nixie_num[0]=remote/100%10;Nixie_num[1]=remote/10%10;Nixie_num[2]=remote/1%10;Delay100ms();}
}unsigned int count_200=0;
void Timer0_Isr(void) interrupt 1
{P0=0x01<<location;NIXIE_CHECK();P0=Seg_Table[Nixie_num[location]];NIXIE_ON();if(++location==8)location=0;if(count_ultar==0)//如果标志位为0{if(++count_200>200)//200ms后,将时间标志位置为1{count_ultar=1;count_200=0;}}
}void Timer0_Init(void) //1毫秒@11.0592MHz
{AUXR |= 0x80; //定时器时钟1T模式TMOD &= 0xF0; //设置定时器模式TL0 = 0xCD; //设置定时初始值TH0 = 0xD4; //设置定时初始值TF0 = 0; //清除TF0标志TR0 = 1; //定时器0开始计时ET0 = 1; //使能定时器0中断
}
void Timer1_Init(void) //1毫秒@11.0592MHz
{AUXR |= 0x40; //定时器时钟1T模式//AUXR &= 0xBF; //定时器时钟12T模式TMOD &= 0x0F; //设置定时器模式TL1 = 0x00; //设置定时初始值TH1 = 0x00; //设置定时初始值TF1 = 0; //清除TF1标志//TR1 = 1; //定时器1开始计时
}void Delay100ms(void) //@11.0592MHz
{unsigned char data i, j, k;_nop_();_nop_();i = 5;j = 52;k = 195;do{do{while (--k);} while (--j);} while (--i);
}
void Delay14us(void) //@11.0592MHz
{unsigned char data i;_nop_();i = 45;//11.0592MHz的单片机,使用stc生成14us延时时,i等于36,这里稍微增大了i让延时增大while (--i);
}void send_wave(void)//发送超声波的函数
{unsigned char i=0;for(i=0;i<8;i++)//发送8个40KHz的超声波{TX=1;Delay14us();TX=0;Delay14us();}
}相关文章:
蓝桥杯电子类单片机提升一——超声波测距
前言 单片机资源数据包_2023 一、超声波测距原理 二、超声波测距的应用 1.超声波的发射 2.单片机知识补充:定时器 3.超声波的接收与计时 4.距离的计算 1)定时器1为16位自动重载+1T11.0592MHz 2)定时器1为16位自动重载&am…...

前端架构: 脚手架开发流程中的难点梳理
脚手架的开发流程 1 )开发流程 创建 npm 项目创建脚手架入口文件,最上方添加: #!/usr/bin/env node 配置 package.json, 添加 bin 属性编写脚手架代码将脚手架发布到 npm 2 )使用流程 安装脚手架 npm install -g your-own-cli …...

django中配置使用websocket
Django 默认情况下并不支持 WebSocket,但你可以通过集成第三方库如 channels 来实现 WebSocket 功能。channels 是一个 Django 应用,它提供了对 WebSocket、HTTP2 和其他协议的支持。 下面是如何在 Django 项目中使用 WebSocket 的基本步骤:…...

Rust复合类型详解
在Rust中,复合类型是一种能够将多个值组合在一起的数据类型。本篇博客将介绍两种常见的复合类型:元组(Tuple)和数组(Array)。 Tuple(元组) 元组是Rust中的一种复合类型,…...

学习 JavaScript 闭包
1. 前言 闭包是 JavaScript 中一种非常重要的概念,它允许函数访问其外部作用域中的变量,即使在函数被返回或者在其原始定义的作用域之外执行时仍然可以访问这些变量。 在讲解闭包之前我们得弄清楚下面的概念: 作用域链: JavaSc…...

VScode中配置 C/C++ 环境 | IT拯救者
文章目录 0 引言1. 下载编辑器VScode2. 下载编译器MinGW并解压3. 将MinGW添加至环境变量4. 配置VScode插件5. 运行代码6. 调整和优化7. 提示8. 例行格式条款9. 例行格式条款 0 引言 由于VScode毛毛张使用不习惯,因此配置教程记不住,不过毛毛张看到一篇不…...

基于Python实现Midjourney集成到(个人/公司)平台中
目前Midjourney没有对外开放Api,想体验他们的服务只能在discord中进入他们的频道进行体验或者把他们的机器人拉入自己创建的服务器中;而且现在免费的也用不了了,想使用就得订阅。本教程使用midjourney-api这个开源项目,搭建Midjou…...

蓝桥杯刷题--python-6
0最大距离 - 蓝桥云课 (lanqiao.cn) n=int(input()) nums=list(map(int,input().split()))max_=float(-inf) for i in range (n):for j in range (i+1,n):tmp=abs(i-j)+abs(nums[i]-nums[j])max_=max(tmp,max_) print(max_) 0最长递增 - 蓝桥云课 (lanqiao.cn) import os im…...
node+vue3+mysql前后分离开发范式——实现对数据库表的增删改查
文章目录 ⭐前言⭐ 功能设计与实现💖 node后端操作数据库实现增删改查💖 vue3前端实现增删改查⭐ 效果⭐ 总结⭐ 结束⭐结束⭐前言 大家好,我是yma16,本文分享关于 node+vue3+mysql前后分离开发范式——实现对数据库表的增删改查。 技术选型 前端:vite+vue3+antd 后端:…...
【Android】使用Apktool反编译Apk文件
文章目录 1. 下载Apktool1.1 Apktool官网下载1.2 百度网盘下载 2. 安装Apktool3. 使用Apktool3.1 配置Java环境3.2 准备Apk文件3.3 反编译Apk文件3.3.1 解包Apk文件3.3.2 修改Apk文件3.3.3 打包Apk文件3.3.4 签名Apk文件 1. 下载Apktool 要使用Apktool,需要准备好 …...
Hive的相关概念——order by 、sort by、distribute by 、cluster by)
(04)Hive的相关概念——order by 、sort by、distribute by 、cluster by
Hive中的排序通常涉及到order by 、sort by、distribute by 、cluster by 一、语法 selectcolumn1,column2, ... from table [where 条件] [group by column] [order by column] [cluster by column| [distribute by column] [sort by column] [limit [offset,] rows]; …...

Django模板(二)
标签if 标签在渲染过程中提供使用逻辑的方法,比如:if和for 标签被 {% 和 %} 包围,如下所示: 由于在模板中,没有办法通过代码缩进判断代码块,所以控制标签都需要有结束的标签 if判断标签{% if %} {% endif %} : # athlete_list 不为空 {% if athlete_list %}# 输出 ath…...

勒索病毒最新变种.faust勒索病毒来袭,如何恢复受感染的数据?
引言: 随着我们进入数字化时代,数据的重要性变得愈发显著,而网络安全威胁也日益增加。.faust勒索病毒是其中一种备受恶意分子钟爱的危险工具,它通过加密用户文件并勒索高额赎金来对个人和组织发起攻击。本文将深入探讨.faust勒索…...
python 人脸检测器
import cv2# 加载人脸检测器 关键文件 haarcascade_frontalface_default.xml face_cascade cv2.CascadeClassifier(haarcascade_frontalface_default.xml)# 读取图像 分析图片 ren4.png image cv2.imread(ren4.png) gray cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 进行人脸…...

机器学习与深度学习
什么是机器学习 机器学习是一门跨学科的学科,它致力于研究和开发让计算机能够模拟人类学习行为的技术和方法。机器学习涉及多个学科的知识,如概率论、统计学、逼近论、凸分析、算法复杂度理论等,这些学科为机器学习提供了理论基础和数学工具…...
,贪心算法1)
算法训练营day27(补),贪心算法1
import "sort" //455. 分发饼干 func findContentChildren(g []int, s []int) int { sort.Ints(g) sort.Ints(s) // g代表胃口数组, s代表饼干数组 count : 0 // 统计数量 //饼干下标 index : len(s) - 1 // 胃口循环 for i : len(g) - 1; i > 0; i--…...

[office] excel2003限定单元格输入值范围教程 #微信#经验分享
excel2003限定单元格输入值范围教程 在Excel中录入数据前都会设置单元格的一些格式,其中会有限定单元格输入值范围的需求,或许有的朋友并不知道单元格该如何限定输入范围,如果不懂的朋友欢迎一起来学习研究。下面是小编带来的关于excel2003限…...
OLED显示红外遥控键码
基本原理 本遥控器的编码是NEC编码,为PWM(脉冲宽度调制)。 发射红外载波的时间固定,通过改变不发射载波的时间来改变占空比。 逻辑“0”是由0.56ms的38KHZ载波和0.560ms的无载波间隔组成;逻辑“1”是由0.56ms的38KHZ…...
LabVIEW智能温度监控系统
LabVIEW智能温度监控系统 介绍了一个基于LabVIEW的智能温度监控系统,实现对工业环境中温度的实时监控与调控。通过集成传感器技术和LabVIEW软件平台,系统能够自动检测环境温度,及时响应温度变化,并通过图形用户界面(GUI)为用户提…...

专业140+总分420+浙江大学842信号系统与数字电路考研经验电子信息与通信,真题,大纲,参考书。
今年考研已经结束,初试专业课842信号系统与数字电路140,总分420,很幸运实现了自己的目标,被浙大录取,这在高考是想都不敢想的学校,在考研时实现了,所以大家也要有信心,通过自己努力实…...

数据投毒太多,尝试把资料搬进本地知识库
说实话,这几天没睡好。上周翻到一个新闻,看得我后背发凉——谷歌首次发现攻击者用AI开发“零日漏洞”攻击工具。不是概念验证,是真实案例。攻击者拿AI绕过双重认证,代码写得跟教科书似的,还带“幻觉”出来的CVSS评分。…...

AI Agent创业融资指南:投资人最看好的Agent项目特征与商业模式
AI Agent创业融资指南:投资人最看好的Agent项目特征与商业模式 各位技术创业者、产品经理、投资人朋友,晚上好!我是深耕AI大模型落地与Agent赛道创业3年多、前后帮2个种子轮项目拿到近5000万天使/A轮融资、现在自己正在做垂直医疗场景诊断Age…...

VASP和QE能带图画不好?可能是你的Python数据处理踩了这些坑
VASP和QE能带图绘制中的Python数据处理陷阱与解决方案 在材料计算领域,能带结构图是理解电子性质的关键可视化工具。许多研究人员在使用VASP或Quantum ESPRESSO(QE)完成第一性原理计算后,往往会选择Python进行数据处理和绘图。然而,这个看似标…...

Circuit Playground Express 硬件解析与四步编程实战:从创客入门到项目开发
1. 项目概述:为什么选择 Circuit Playground Express 作为创客起点 如果你对硬件编程、物联网或者智能设备感兴趣,但又被 Arduino Uno 上密密麻麻的杜邦线和面包板劝退,或者觉得树莓派 Zero 的 Linux 系统门槛太高,那么 Adafruit…...
)
数字视频发送器(SDI编码器)
这是一款数字视频发送器(SDI编码器),功能对标Genum公司的GV7600和Semtech的GS2972。该芯片主要用于将并行数字视频信号(如BT.1120)转换为串行SDI信号,通过75欧姆同轴线缆进行传输。特征:传输速率…...

程序员的“黄金5年”:如何快速成为技术骨干
一、认知黄金5年:测试工程师的职业分水岭在软件行业,“黄金5年”是从业者职业发展的关键期,对于软件测试工程师而言更是如此。这5年不仅是技术能力从量变到质变的积累期,更是职业方向从模糊到清晰的定型期。据行业数据显示&#x…...

AI写教材新突破!低查重工具,快速生成完整教材框架与内容!
教材编写困境与 AI 工具的破局之道 很多教材编写者常常感到困扰:尽管他们在正文内容上付出了大量心血,但由于缺乏配套资源,最终的教学效果难以理想化。设计课后练习时,缺乏新颖的题型构思;想制作直观的教学课件&#…...

如何快速获取全网音乐歌词:免费开源工具的终极指南
如何快速获取全网音乐歌词:免费开源工具的终极指南 【免费下载链接】163MusicLyrics 云音乐歌词获取处理工具【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 还在为找不到心爱歌曲的歌词而烦恼吗?163Music…...

恶意软件分析利器:基于统计特征的二进制模式识别与批量编辑工具
1. 项目概述:一个面向恶意软件分析的“均值”编辑器最近在分析一些PUA(潜在不受欢迎应用程序)和恶意软件样本时,我经常遇到一个头疼的问题:很多样本为了绕过静态检测,会嵌入大量垃圾代码、花指令࿰…...

如何快速制作专业演示文稿?终极免费开源在线PPT工具PPTist完整指南
如何快速制作专业演示文稿?终极免费开源在线PPT工具PPTist完整指南 【免费下载链接】PPTist PowerPoint-ist(/pauəpɔintist/), An online presentation application that replicates most of the commonly used features of MS PowerPoint,…...