OLED显示红外遥控键码
基本原理
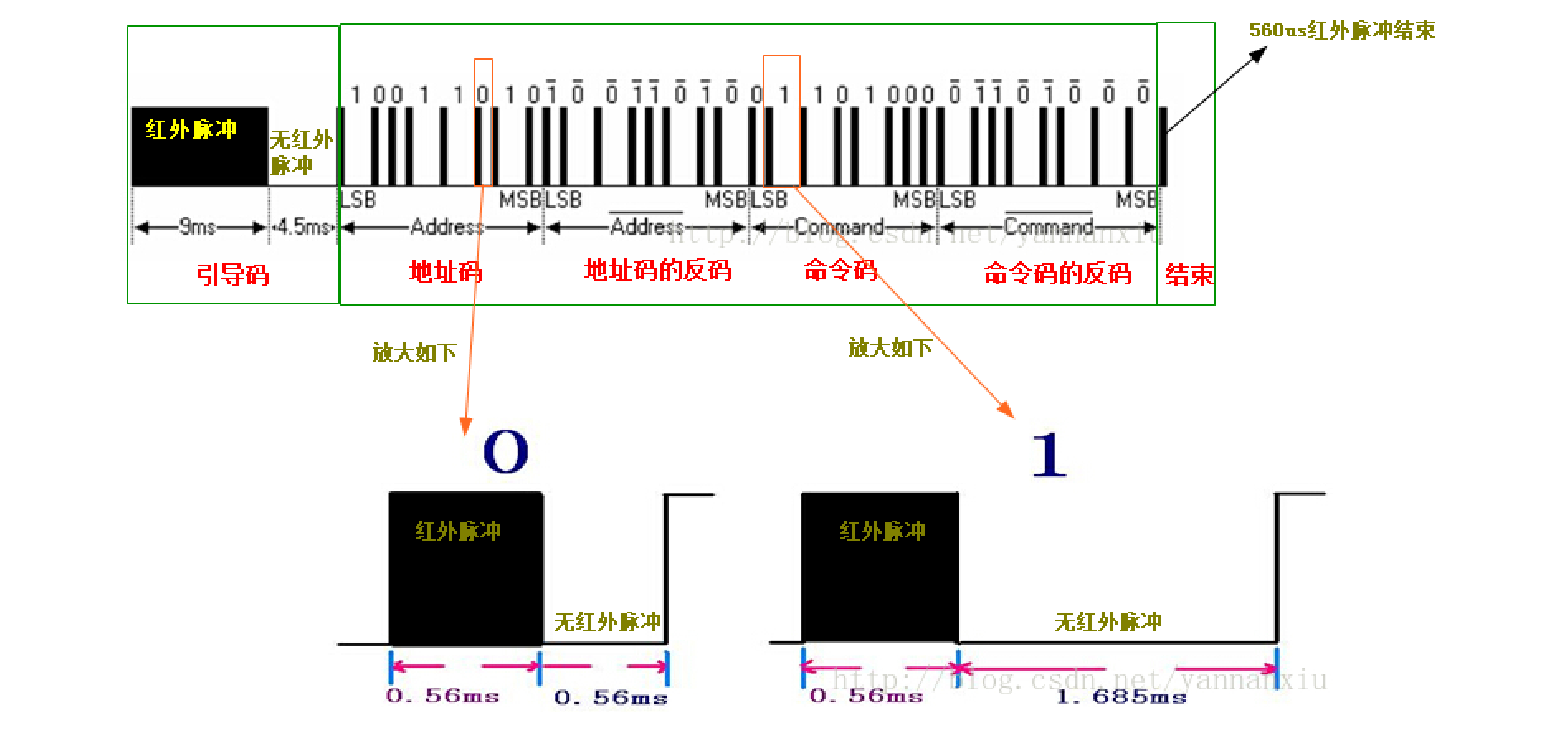
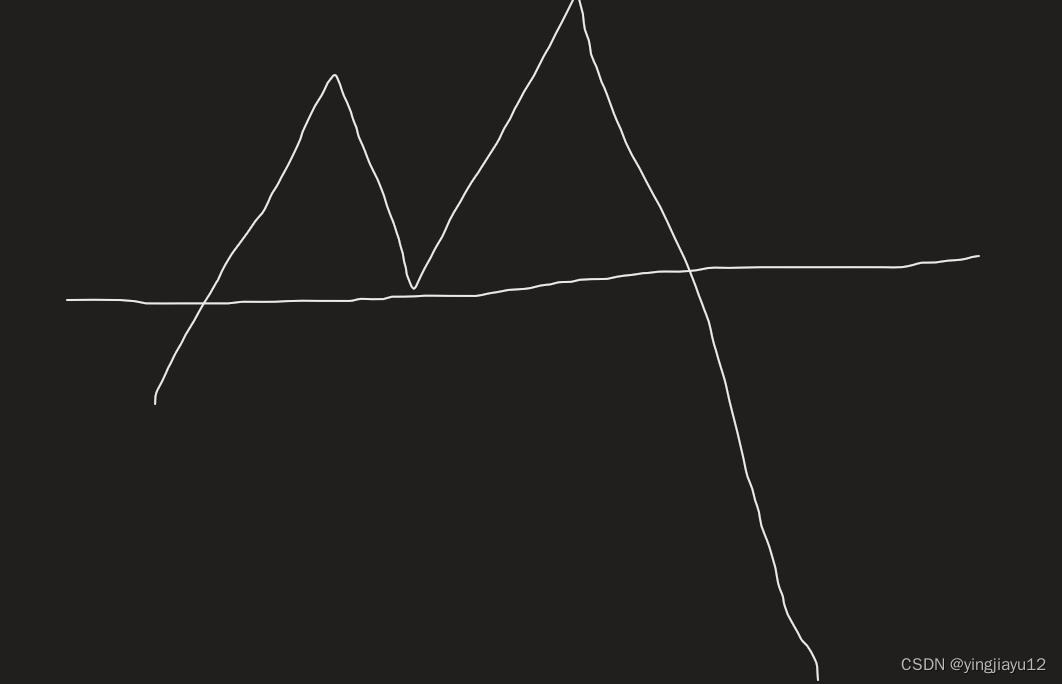
本遥控器的编码是NEC编码,为PWM(脉冲宽度调制)。
发射红外载波的时间固定,通过改变不发射载波的时间来改变占空比。
- 逻辑“0”是由0.56ms的38KHZ载波和0.560ms的无载波间隔组成;
- 逻辑“1”是由0.56ms的38KHZ载波和1.685m 的无载波间隔组成;
- 结束位是0.56ms的38K载波。
- 重复码由9ms红外脉冲和2.25ms的无红外脉冲以及560us的红外脉冲组成。
若发了一次命令码之后,一直按住遥控器按键并未松手,遥控器发射端将不会再发送命令码,而是每隔 110ms 时间,发送一段重复码。
过程分析
初始化部分
通用配置过程:
- 将相关的gpio和硬件挂载到RCC
- 初始化GPIO
- 初始化TIM时基单元
- 初始化IC输入捕获
- 初始化NVIC中断管理
- 实现中断处理函数
- 启用中断
- 启动定时器

TIM3的CH1通道位于PA6引脚。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed =GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
配置时基单元。arr和psc作为函数参数传入,支持动态调整。
在本文中,分频系数为72,这样标准周期就是1us,方便后续计算。
TIM_InternalClockConfig(TIM3);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period = arr - 1;
TIM_TimeBaseStructure.TIM_Prescaler = psc - 1;
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);
配置输入捕获。将TIM_ICInitStructure.TIM_ICFilter设置为0xf是为了对输入捕获信号进行滤波,滤波时间为8个时钟周期。
- 对应16个采样点的平均,意味着最终捕获值是16个相邻采样值的平均值。
- 这相当于对输入信号进行8个时钟周期的滤波,因为每个采样周期占用一个时钟周期。
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICFilter = 0xf;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_CKD_DIV1;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInit(TIM3,&TIM_ICInitStructure);
配置中断优先级。中断优先级的配置方案需要在主函数中设置:NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority =1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_Init(&NVIC_InitStructure);
在之前的《PWM输入/输出》中,输入捕获采用的是事件方式:
TIM_SelectInputTrigger(TIM3,TIM_TS_TI1FP1);
TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_Reset);
当时没有设置中断,设置了事件。事件由硬件自动完成,不需要我们实现中断处理函数,只需要指定处理方式即可。
我们这次用不到事件。
涉及各种码的判断,以及信号处理阶段的判断,硬件事件难以处理这种复杂任务,需要通过中断实现。
启用中断标志位,在TIM3的CC1通道出现下降沿时,自动触发TIM_IT_CC1中断:
TIM_ITConfig(TIM3,TIM_IT_CC1,ENABLE);
配置完毕,启动TIM定时器:
TIM_Cmd(TIM3,ENABLE);
中断处理函数
通过输入捕获,判断两个下降沿之间的时间间隔:
- 引导码:13.5ms
- 重复码:11.25ms
- 逻辑0:1.12ms
- 逻辑1:2.245ms
将输入捕获通道的GPIO设置为上拉输入。在没有外界信号时会自动上拉到高电平。
时间间隔通过TIM_GetCounter(TIM3)获取。TIM定时器设置的标准周期为1us,返回值即为下降沿之间的时间间隔,单位为us。
获取之后通过TIM_SetCounter(TIM3,0);设置寄存器值为0,相当于重新开始计数。由于一个周期的开始和结束都是下降沿,所以上一个周期的结束接着就是下一个周期的开始,计数值误差可以接受。
操作类似于一个状态机:
- 初始处于空闲状态,TIM定时器的值是无意义的。在第一个下降沿到来时,设置TIM寄存器值为0,开始计数,进入准备状态。
- 准备状态下,第二个下降沿到来时,根据时长判断是引导码还是重复码。重复码则回到空闲状态。引导码还需要读取具体的指令,进入接受状态。
- 接收状态下,逐位接收,共32位。接收结束后回到空闲状态。等待下一个响应。
为什么引导码和重复码在同一个状态下判断?
对于上面四种码的时间间隔,很明显:引导码与重复码相近,逻辑0和逻辑1相近。
如果同一个阶段去判断时间间隔差距过大的码,可能造成数据遗漏。
如何按位接收?
需要用到指针,通过模运算、位运算实现。
指令一共有32位,需要一个char[4]类型的数组。
创建一个指针,其实是整型,
- 对8做除法,用于对指定下标的char赋值
- 对8取模之后,值介于
[0,7],为指定位赋值
这种做法在存储器扩展、cache映射中都有应用,映射的常用方式就是取模。
如果学过,应该不会陌生。
数据校验
NEC编码的数据包括:
8位地址码+8位地址码的反码+8位命令码+8位命令码的反码
验证操作就是将反码部分按位取反,判断是否相等。
Addr_Temp = ~IR_DATA[1];
Cmd_Temp = ~IR_DATA[3];
if (IR_DATA[0] == Addr_Temp && IR_DATA[2] == Cmd_Temp) //数据验证
{IR_Address = IR_DATA[0];IR_Command = IR_DATA[2];IR_DataFlag = 1;
}
代码实现
到目前,需要创建如下变量:
uint8_t IR_State:记录当前状态:空闲/准备/接收uint16_t IR_Time:下降沿间隔时间:引导/重复/0/1uint8_t IR_RepeatFlag,IR_DataFlag:数据状态:重复/有数据uint8_t IR_DATA[4]:数据:地址码+地址码反码+命令码+命令码反码uint8_t IR_pData:指针:对IR_DATA进行段选和位选
void TIM3_IRQHandler()
{uint8_t Addr_Temp,Cmd_Temp;if (TIM_GetITStatus(TIM3,TIM_FLAG_CC1) != RESET){if (IR_State == 0) //空闲态{TIM_SetCounter(TIM3,0);IR_State = 1;}else if (IR_State == 1) //准备态{IR_Time = TIM_GetCounter(TIM3);if (IR_Time > 13500 - 500 && IR_Time < 13500+500) //Start信号{IR_State = 2;}else if (IR_Time > 11250 - 500 && IR_Time < 11250+500) //Repeat信号{IR_State = 0;IR_RepeatFlag = 1;}else{}TIM_SetCounter(TIM3,0);}else if (IR_State == 2) //接收态{IR_Time = TIM_GetCounter(TIM3);if (IR_Time > 1120 -500 && IR_Time < 1120+500) //逻辑0{IR_DATA[IR_pData/8] &= ~(0x01 << (IR_pData %8));IR_pData++;}else if (IR_Time > 2250 -500 && IR_Time < 2250 + 500) //逻辑1{IR_DATA[IR_pData/8] |= (0x01 << (IR_pData %8));IR_pData++;}else {IR_pData = 0;IR_State = 1;}if (IR_pData>=32) //如果接收完32位数据{IR_pData = 0;Addr_Temp = ~IR_DATA[1];Cmd_Temp = ~IR_DATA[3];if (IR_DATA[0] == Addr_Temp && IR_DATA[2] == Cmd_Temp) //数据验证{IR_Address = IR_DATA[0];IR_Command = IR_DATA[2];IR_DataFlag = 1;}IR_State = 0;}TIM_SetCounter(TIM3,0);}else{}TIM_ClearITPendingBit(TIM3,TIM_IT_CC1);}
}
实验效果
飞线
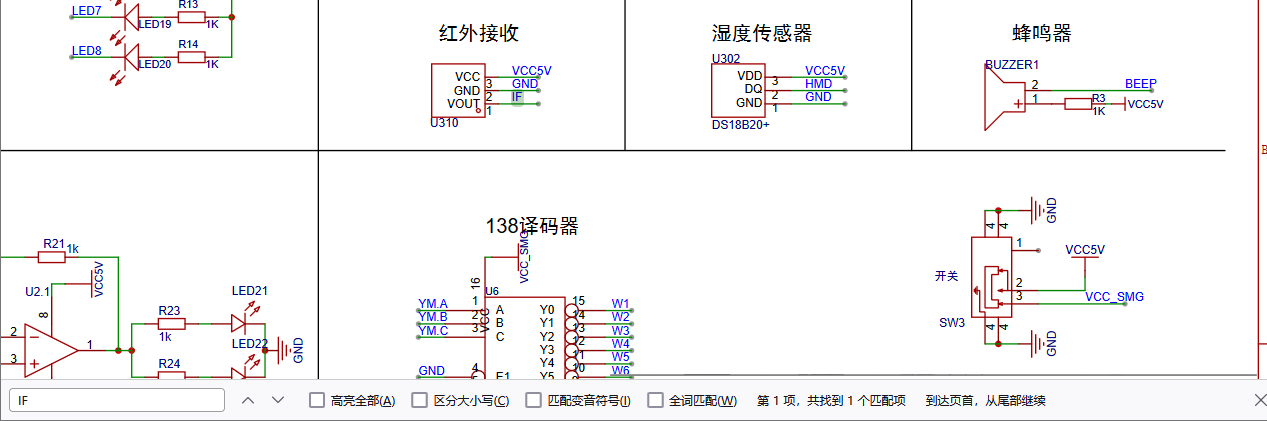
红外部分并不直接与PA6相连,需要飞线。
用杜邦线连接IF和TIM3的CH1所在的PA6即可。
在主函数中调用
uint8_t Address;
uint8_t Command;
uint8_t Num;
int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);Remote_Init(30000,72);OLED_Init();OLED_ShowString(1,1,"ADDR CMD NUM");OLED_ShowString(2,1,"00 00 000");while(1){if (IR_GetDataFlag() || IR_GetRepeatFlag()){Address = IR_GetAddress();Command = IR_GetCommand();OLED_ShowHexNum(2,1,Address,2);OLED_ShowHexNum(2,6,Command,2);if (Command == IR_VOL_ADD){Num++;}if(Command == IR_VOL_MINUS){Num--;}OLED_ShowNum(2,10,Num,3);}}
}
VID_20240215_014048
参考
- STM32F103C8T6引脚定义.xlsx
- stm32 使用说明+笔记(必读).pdf
- 32版开发板原理图.pdf
相关文章:
OLED显示红外遥控键码
基本原理 本遥控器的编码是NEC编码,为PWM(脉冲宽度调制)。 发射红外载波的时间固定,通过改变不发射载波的时间来改变占空比。 逻辑“0”是由0.56ms的38KHZ载波和0.560ms的无载波间隔组成;逻辑“1”是由0.56ms的38KHZ…...
LabVIEW智能温度监控系统
LabVIEW智能温度监控系统 介绍了一个基于LabVIEW的智能温度监控系统,实现对工业环境中温度的实时监控与调控。通过集成传感器技术和LabVIEW软件平台,系统能够自动检测环境温度,及时响应温度变化,并通过图形用户界面(GUI)为用户提…...

专业140+总分420+浙江大学842信号系统与数字电路考研经验电子信息与通信,真题,大纲,参考书。
今年考研已经结束,初试专业课842信号系统与数字电路140,总分420,很幸运实现了自己的目标,被浙大录取,这在高考是想都不敢想的学校,在考研时实现了,所以大家也要有信心,通过自己努力实…...
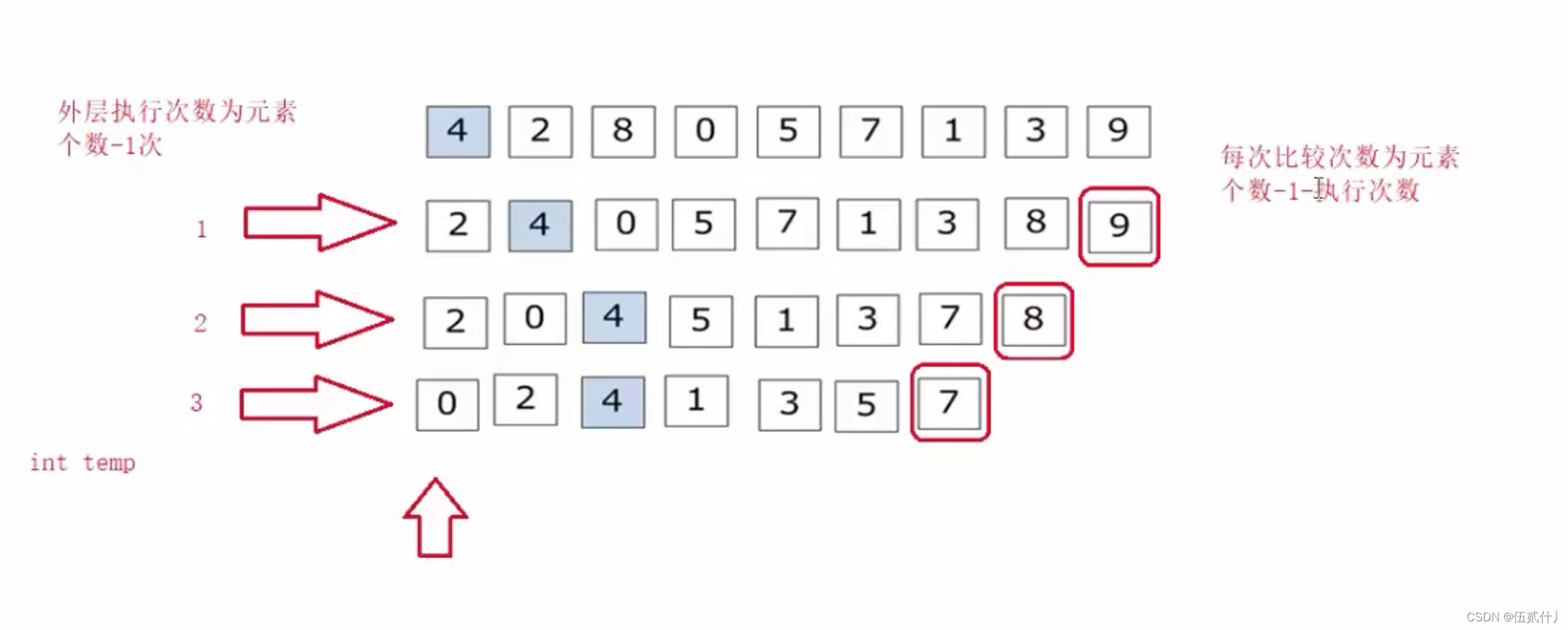
C语言学习day15:数组强化训练
题目一: 称体重:分别给10个值,来获得最大值 思路: 定义数组,给数组内赋10个值第一个下标的值与第二个下标的值进行比较定义max,将比较得来的较大的值赋值给max一直比较直到比较到最后一个下标࿰…...

缓存穿透、缓存击穿与缓存雪崩
缓存穿透、缓存击穿与缓存雪崩 1.本质区别 缓存穿透指的是数据库不存在数据,导致无法缓存,每次查询都查数据库,数据库压垮 缓存击穿指的是缓存键值对key过期了,key过期期间,大量请求访问,不经过缓存&…...

一周学会Django5 Python Web开发-项目配置settings.py文件-模版配置
锋哥原创的Python Web开发 Django5视频教程: 2024版 Django5 Python web开发 视频教程(无废话版) 玩命更新中~_哔哩哔哩_bilibili2024版 Django5 Python web开发 视频教程(无废话版) 玩命更新中~共计17条视频,包括:2024版 Django5 Python we…...
CF1845 D. Rating System [思维题+数形结合]
传送门:CF [前题提要]:自己在做这道题的时候思路完全想错方向,导致怎么做都做不出来,看了题解之后感觉数形结合的思考方式挺好的(或者这种做法挺典的),故写篇题解记录一下 题目很简单,不再解释.先不考虑 k k k,想想是一种什么情况?很显然应该是跟下图一样是一个折线图的变化.…...
HeidiSQL安装配置(基于小皮面板(phpstudy))连接MySQL
下载资源 对于这款图形化工具,博主建议通过小皮面板(phpstudy)来下载即可,也是防止你下载到钓鱼软件,小皮面板(phpstudy)如果你不懂是什么,请看下面链接这篇博客 第二篇:…...

【蓝桥2013】错误票据
错误票据 题目描述 某涉密单位下发了某种票据,并要在年终全部收回。 每张票据有唯一的 ID 号。全年所有票据的 ID 号是连续的,但 ID 的开始数码是随机选定的。 因为工作人员疏忽,在录入 ID 号的时候发生了一处错误,造成了某个…...

nvm对node版本进行管理及疑难解决,vue项目搭建与启动
一、nvm安装与node版本管理 nvm安装 1、nvm地址:https://github.com/coreybutler/nvm-windows/releases 2、无需配置安装包,nvm-setup-v1.1.10.zip 解压后双击nvm-setup.exe,选择安装路径,一路next即可 打开dos窗口输入nvm vers…...
Redisson分布式锁 原理 + 运用 记录
Redisson 分布式锁 简单入门 pom <dependency><groupId>org.redisson</groupId><artifactId>redisson</artifactId><version>3.13.6</version></dependency>配置类 package com.hmdp.config;import org.redisson.Redisson;…...
Spring Boot 笔记 021 项目部署
1.1 引入坐标,并双击package打包成jar包 1.2 在服务器上运行jar包 1.3 使用postman测试 2.1 运行配置 2.1.1 命令更改端口 java -jar big-event-1.0-SNAPSHOT.jar --server.port7777 2.1.2 环境变量更新(略) 2.1.3 外部配置文件,…...

新技术革命开始了,Sora一出,所有的视频人、电影人都下岗
Sora一出,所有的视频人、电影人都下岗! Sora直接用文本制作长达60秒的视频长镜头,也就是说,将来,只需要输入分镜脚本,电影就可以制作出来,不再需要几十人几百人声势浩大地去“拍”了,…...

【FPGA开发】Modelsim和Vivado的使用
本篇文章包含的内容 一、FPGA工程文件结构二、Modelsim的使用三、Vivado的使用3.1 建立工程3.2 分析 RTL ANALYSIS3.2.1 .xdc约束(Constraints)文件的产生 3.3 综合 SYNTHESIS3.4 执行 IMPLEMENTATION3.5 烧录程序3.6 程序固化3.6.1 SPI约束3.6.2 .bin文…...

现代浏览器对 es模块 【esm】原生支持
现代浏览器对 ES(ECMAScript)模块的原生支持是指浏览器可以直接解析和执行 JavaScript 文件中的 ES 模块语法,无需额外的工具或转换。 具体来说,当浏览器遇到 import 和 export 关键字时,会将其识别为 ES 模块语法&…...
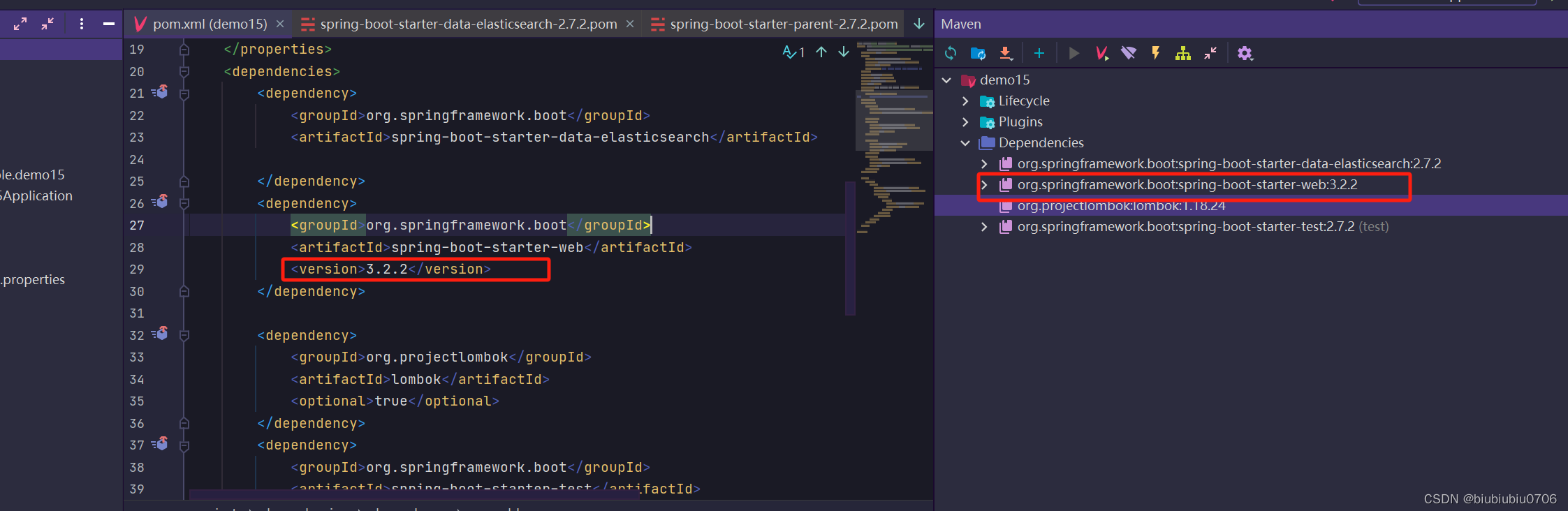
修改SpringBoot中默认依赖版本
例如SpringBoot2.7.2中ElasticSearch版本是7.17.4 我希望把它变成7.6.1...
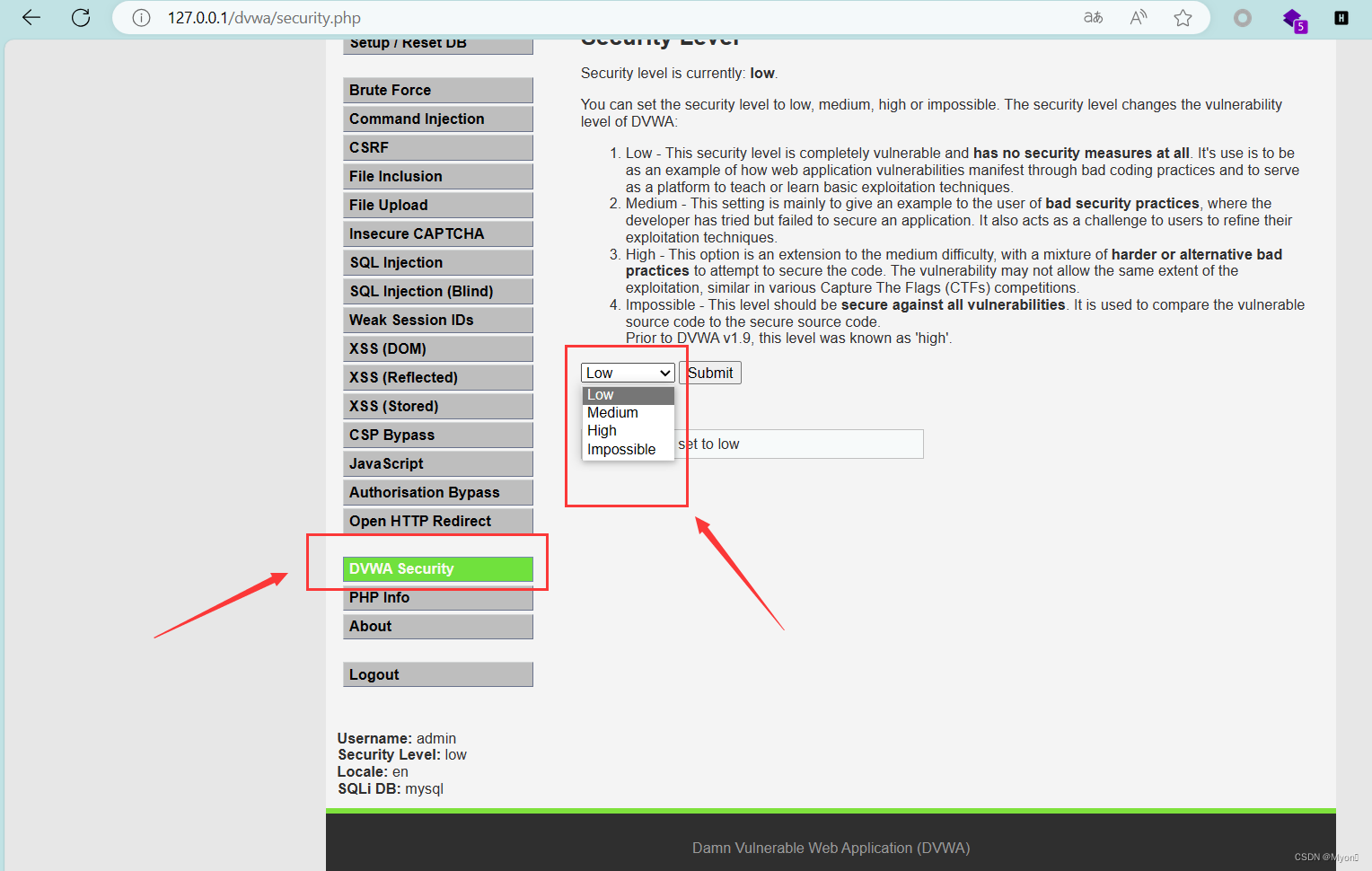
网络安全最典型基础靶场-DVWA-本地搭建与初始化
写在前面: 之前也打过这个 DVWA 靶场,但是是在虚拟机环境下的一个小块分区靶场; 本篇博客主要介绍在本地搭建 DVWA 靶场以及靶场的初始化,后续会陆续更新通关教程。 由于我们是在本地搭建,则需要基于你已经装好 phpstu…...

算法-----高精度2(高精度乘法,高精度除法,高精度斐波那锲数列)
高精度乘法 对于高精度乘法来说似乎不像高精度加减法那样简单了,我们似乎得一个一个加了,因为我们都知道 abaaaaa…a(b个a)。如果真要这要的话那1e9*1e9不得超时啊,所以不能这样,我们还是得从乘法竖式入手 这样看似乎看不出来什…...
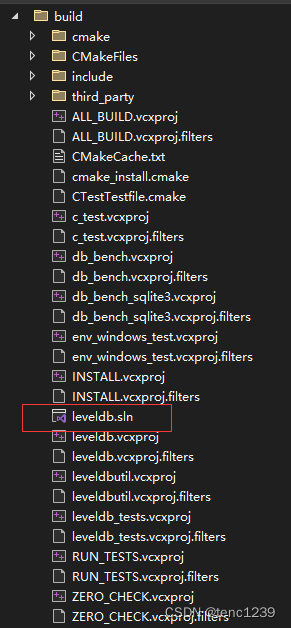
windows vs 自己编译源码 leveldb 然后使用自己编译的文件
1 准备源码文件 1.1 第一种方法 git下载源码 vs项目中git leveldb源码和git third_party googletest-CSDN博客 1.2 第二种方法 手动下载 然后把第三方的源码下载 复制到 third_party 对应的文件夹中 没有文件夹 third_party -> powershell mkdir third_party 2 编译lev…...
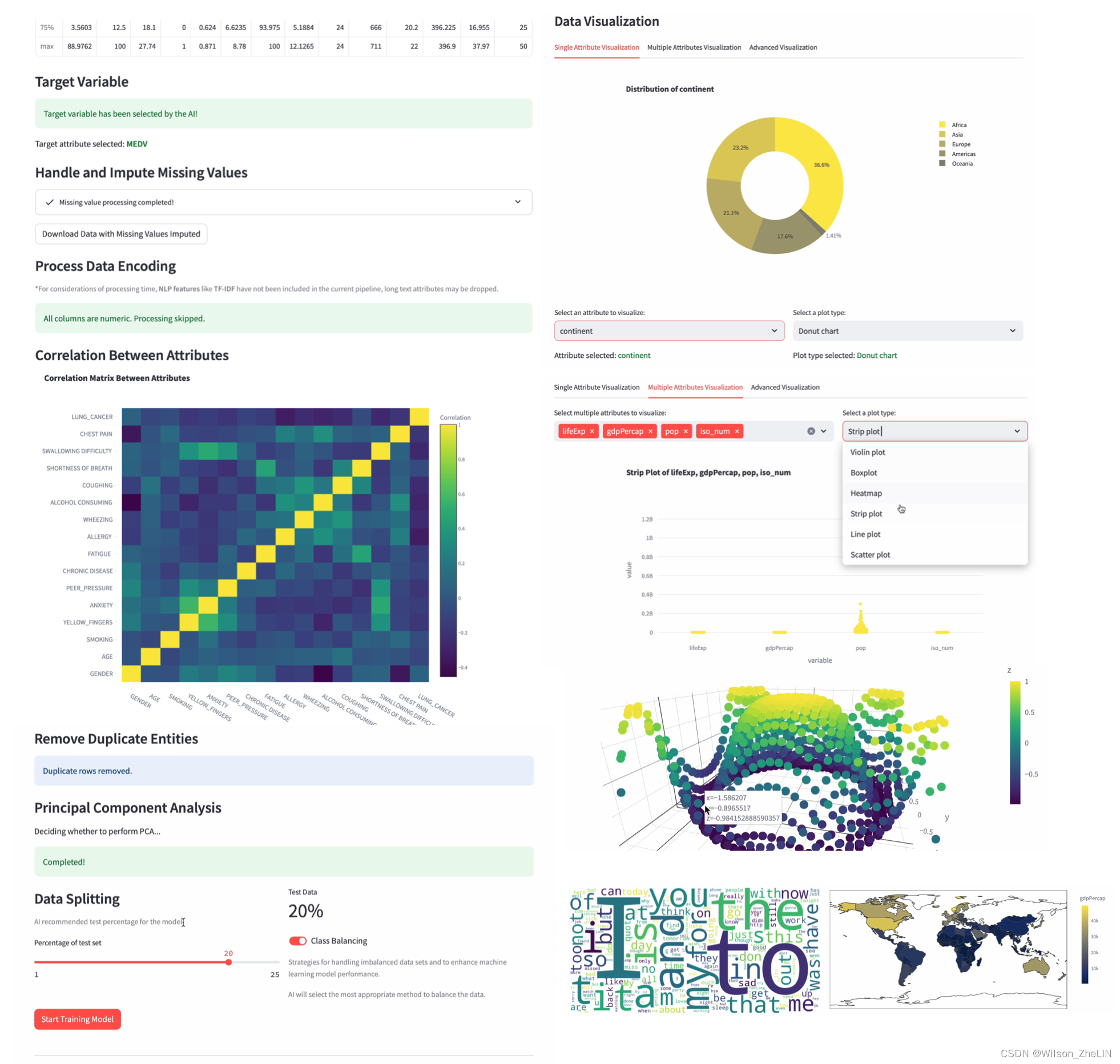
基于GPT一键完成数据分析全流程的AI Agent: Streamline Analyst
大型语言模型(LLM)的兴起不仅为获取知识和解决问题开辟了新的可能性,而且催生了一些新型智能系统,例如旨在辅助用户完成特定任务的AI Copilot以及旨在自动化和自主执行复杂任务的AI Agent,使得编程、创作等任务变得高效…...

Redis分布式锁进阶第六十八篇
一、本篇前置衔接 第六十八篇我们完成了全系列终局复盘,整理了故障排查SOP与企业级落地铁律。常规单资源锁、热点分片锁、隔离锁全部讲透,但真实复杂业务永远不是单一资源:下单要扣库存、扣优惠券、扣积分、冻结余额,多资源并行争…...

重复内容误标率高达37%?NotebookLM检测逻辑漏洞全曝光,立即修复这6个隐藏开关
更多请点击: https://intelliparadigm.com 第一章:重复内容误标率高达37%?NotebookLM检测逻辑漏洞全曝光,立即修复这6个隐藏开关 NotebookLM 的“重复内容检测”功能并非基于端到端语义比对,而是依赖于分块哈希&#…...

你的Type-C设备为什么容易坏?可能是静电防护没做对!从手机到笔记本的防护方案拆解
Type-C设备静电防护全指南:从原理到实战的完整解决方案 每次插拔Type-C数据线时,那个微小的火花可能正在悄悄摧毁你的设备。我拆解过上百台因静电损坏的电子产品,发现90%的Type-C接口故障都始于那个看似无害的瞬间放电现象。这种现象在干燥季…...

基于BLE MIDI的智能木琴:用Arduino与电磁铁桥接物理乐器与数字音频工作站
1. 项目概述:当传统木琴遇见现代数字音乐如果你和我一样,既着迷于传统打击乐器那清脆、富有共鸣的物理音色,又离不开现代数字音频工作站(DAW)那强大的创作和编辑能力,那么“如何将两者无缝桥接”可能一直是…...

入库篇:仓库里的货从哪来?——WMS货品来源全解析,物流新人必读
仓库里的货从哪来?——WMS货品来源全解析,物流新人必读 摘要:每天在WMS系统里看到成百上千的库存记录,但你想过没有——这些货品最初是怎么进入系统的?是采购进来的?生产出来的?客户退回来的&am…...

如何用QTTabBar彻底告别Windows资源管理器的混乱:一个完整的高效文件管理解决方案
如何用QTTabBar彻底告别Windows资源管理器的混乱:一个完整的高效文件管理解决方案 【免费下载链接】qttabbar QTTabBar is a small tool that allows you to use tab multi label function in Windows Explorer. https://www.yuque.com/indiff/qttabbar 项目地址:…...

数控编程软件|PowerMill 2026全流程下载安装教程
相信大家不会感到陌生,PowerMill是一款功能强大且专业的计算机辅助制造(CAM)软件工具,专注于复杂零件的数控(CNC)加工编程,尤其适用于模具、航空航天、汽车制造等高精度、高复杂度…...

Linux驱动调试利器:debugfs接口设计与实现详解
1. 项目概述:为什么我们需要debugfs?在Linux内核驱动的开发与调试过程中,我们常常面临一个核心痛点:如何在不重启系统、不重新编译驱动、甚至不借助复杂外部工具的情况下,实时地窥探驱动内部的状态、修改关键参数&…...

AI Agent Skill 从入门到精通:定义、结构、调用链路与底层原理
一篇帮你从"知道 Skill 这个词"到"能独立设计生产级 Skill"的系统教学,含 3 个完整实战案例。阅读提示适合谁看:正在做或准备做 AI Agent 开发的工程师,尤其是从传统后端 / 数据仓库转过来的同学看完能做什么:…...

在Windows上安装安卓应用的终极指南:告别模拟器,享受原生体验
在Windows上安装安卓应用的终极指南:告别模拟器,享受原生体验 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾梦想在Windows电脑上直接…...