openJudge | 距离排序 C语言
总时间限制: 1000ms 内存限制: 65536kB
描述
给出三维空间中的n个点(不超过10个),求出n个点两两之间的距离,并按距离由大到小依次输出两个点的坐标及它们之间的距离。
输入
输入包括两行,第一行包含一个整数n表示点的个数,第二行包含每个点的坐标(坐标都是整数)。点的坐标的范围是0到100,输入数据中不存在坐标相同的点。
输出
对于大小为n的输入数据,输出n*(n-1)/2行格式如下的距离信息:
(x1,y1,z1)-(x2,y2,z2)=距离
其中距离保留到数点后面2位。
(用cout输出时保留到小数点后2位的方法:cout<
样例输入
4
0 0 0 1 0 0 1 1 0 1 1 1
样例输出
(0,0,0)-(1,1,1)=1.73
(0,0,0)-(1,1,0)=1.41
(1,0,0)-(1,1,1)=1.41
(0,0,0)-(1,0,0)=1.00
(1,0,0)-(1,1,0)=1.00
(1,1,0)-(1,1,1)=1.00
提示
用cout输出时保留到小数点后2位的方法:cout<<fixed<<setprecision(2)<<x
注意:
冒泡排序满足下面的性质,选择排序和快速排序(qsort或sort)需要对下面的情况进行额外处理
使用冒泡排序时要注意边界情况的处理,保证比较的两个数都在数组范围内
- 对于一行输出中的两个点(x1,y1,z1)和(x2,y2,z2),点(x1,y1,z1)在输入数据中应出现在点(x2,y2,z2)的前面。
比如输入:
2
0 0 0 1 1 1
输出是:
(0,0,0)-(1,1,1)=1.73
但是如果输入:
2
1 1 1 0 0 0
输出应该是:
(1,1,1)-(0,0,0)=1.73
- 如果有两对点p1,p2和p3,p4的距离相同,则先输出在输入数据中靠前的点对。
比如输入:
3
0 0 0 0 0 1 0 0 2
输出是:
(0,0,0)-(0,0,2)=2.00
(0,0,0)-(0,0,1)=1.00
(0,0,1)-(0,0,2)=1.00
如果输入变成:
3
0 0 2 0 0 1 0 0 0
则输出应该是:
(0,0,2)-(0,0,0)=2.00
(0,0,2)-(0,0,1)=1.00
(0,0,1)-(0,0,0)=1.00
答案
#include <stdio.h>
#include <math.h>
typedef struct {int start[3];int end[3];double dis;int weight;
} points;
int main() {static int n, p=0;static int a[10][4];static points point[1024], t;scanf("%d", &n);for(int i = 0; i < n; i++) {scanf("%d %d %d", &a[i][0], &a[i][1], &a[i][2]);}for(int i = 0; i < n; i++) {for(int j = i+1; j < n; j++) {point[p].start[0] = a[i][0];point[p].start[1] = a[i][1];point[p].start[2] = a[i][2];point[p].end[0] = a[j][0];point[p].end[1] = a[j][1];point[p].end[2] = a[j][2];point[p].dis = sqrt((a[i][0]-a[j][0])*(a[i][0]-a[j][0])+(a[i][1]-a[j][1])*(a[i][1]-a[j][1])+(a[i][2]-a[j][2])*(a[i][2]-a[j][2]));point[p].weight = p;p++;}}for(int i = 0; i < p; i++) {for(int j = i+1; j < p; j++) {if(point[i].dis < point[j].dis) {t = point[i];point[i] = point[j];point[j] = t;} else if(point[i].dis == point[j].dis) {if(point[i].weight > point[j].weight) {t = point[i];point[i] = point[j];point[j] = t;}}}}for(int i = 0; i < p; i++) {printf("(%d,%d,%d)-(%d,%d,%d)=%.2f\n", point[i].start[0], point[i].start[1], point[i].start[2], point[i].end[0], point[i].end[1], point[i].end[2], point[i].dis);}
}
至于weight,它的作用,就只是增加一个权重罢了。
相关文章:

openJudge | 距离排序 C语言
总时间限制: 1000ms 内存限制: 65536kB 描述 给出三维空间中的n个点(不超过10个),求出n个点两两之间的距离,并按距离由大到小依次输出两个点的坐标及它们之间的距离。 输入 输入包括两行,第一行包含一个整数n表示点的个数,第二…...

【教程】MySQL数据库学习笔记(三)——数据定义语言DDL(持续更新)
写在前面: 如果文章对你有帮助,记得点赞关注加收藏一波,利于以后需要的时候复习,多谢支持! 【MySQL数据库学习】系列文章 第一章 《认识与环境搭建》 第二章 《数据类型》 第三章 《数据定义语言DDL》 文章目录 【MyS…...
)
[leetcode]买卖股票的最佳时机 (动态规划)
121. 买卖股票的最佳时机 给定一个数组 prices ,它的第 i 个元素 prices[i] 表示一支给定股票第 i 天的价格。 你只能选择 某一天 买入这只股票,并选择在 未来的某一个不同的日子 卖出该股票。设计一个算法来计算你所能获取的最大利润。 返回你可以从…...
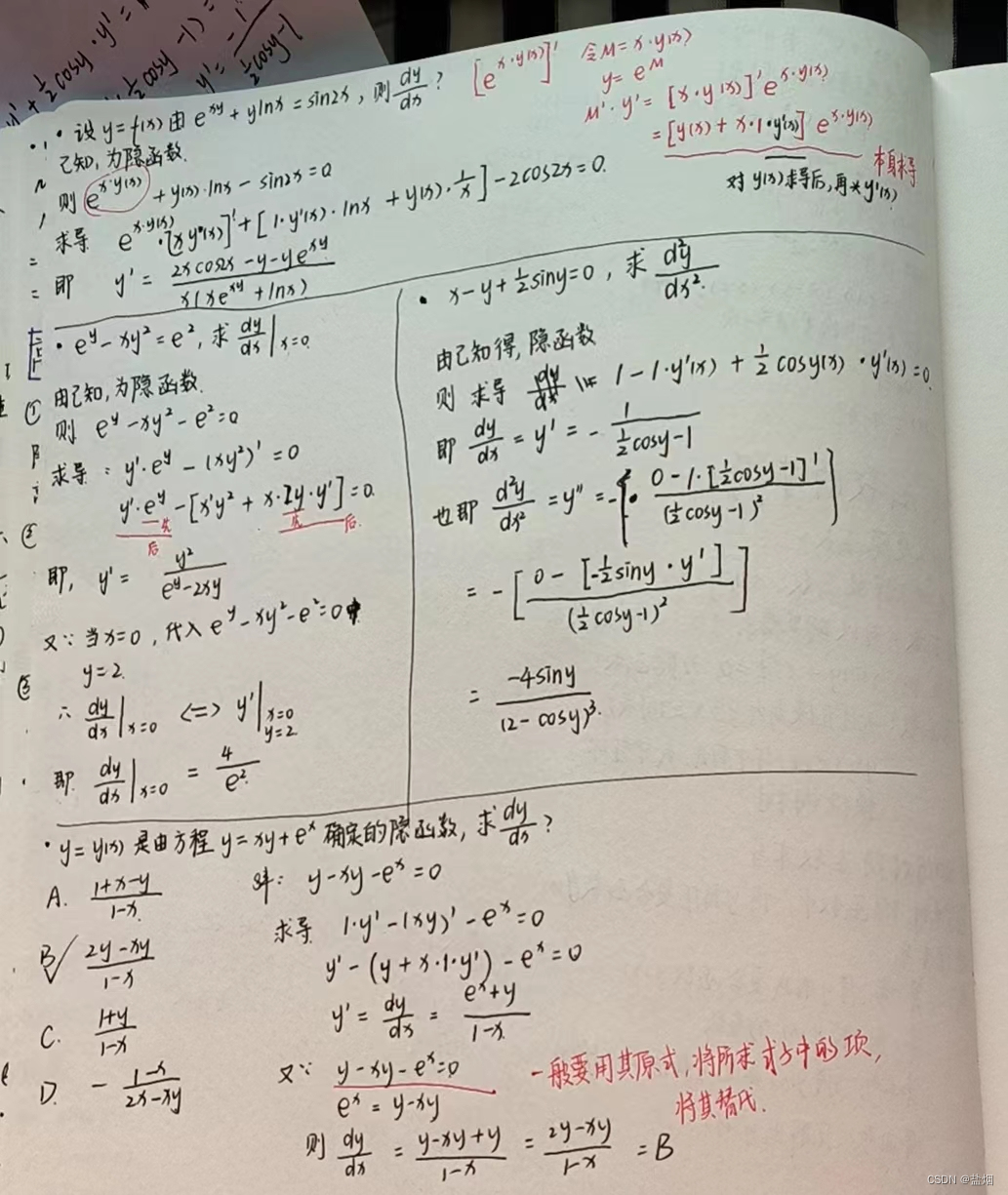
隐函数的求导【高数笔记】
1. 什么是隐函数? 2. 隐函数的做题步骤? 3. 隐函数中的复合函数求解法,与求导中复合函数求解法有什么不同? 4. 隐函数求导的过程中需要注意什么?...
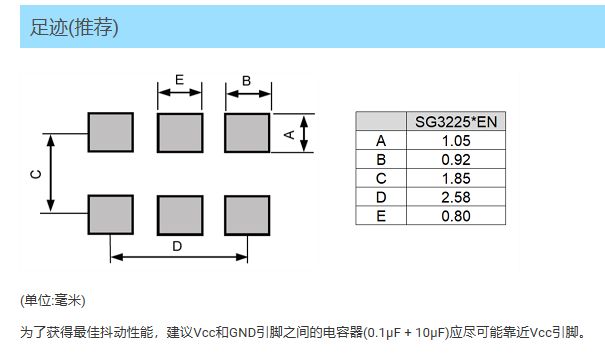
SG3225EEN晶体振荡器规格书
SG3225EEN 晶振是EPSON/爱普生的一款额定频率25 MHz至500 MHz的石英晶体振荡器,6脚贴片,LV-PECL输出,3225封装常规有源晶振,具有小尺寸,轻薄型,高稳定性,低相位抖动,低电源电压&…...

ESP8266 常用AT指令
一、ESP8266的AT指令要点、常见错误 AT指令要大写;以"\r\n"作结尾;串口通信,115200-None-8-1;支持2.4G频段,不支持5G频段 (如果用手机创建热点,注意选择2.4G)不支持中文的wifi名称工作模式,上电…...

esbuild 构建工具为什么很快?
esbuild 构建工具之所以很快,主要有以下几个原因: Go语言编写:esbuild 是用 Go 语言编写的,Go 语言以其高效的并发模型和编译速度而闻名。与一些其他构建工具相比,Go 语言在并发处理和内存管理方面表现出色,…...

解决vscode报错,在赋值前使用了变量“XXX“
问题:如图所示 解决方法: 法一: 补全函数使其完整 法二: 使用断言...

python自动定时任务schedule库的使用方法
当你需要在 Python 中定期执行任务时,schedule 库是一个非常实用的工具。它可以帮助你自动化定时任务。以下是一些使用示例: 基本使用: import schedule import timedef job():print("Im working...")schedule.every(10).minutes.d…...

用机器学习方法重构期货商品板块
用机器学习方法重构期货商品板块 阿岛格 参考专栏:低门槛搭建个人量化平台 https://www.zhihu.com/column/c_1441014235068944386 摘 要 金融市场商品期货的板块分类,通常根据不同交易所、监管机构和证券商标准,按照期货标的属性、或产业链关系等进行分类,各自分类略有差…...
51单片机项目(29)——基于51单片机的避障跟随小车
1.功能设计 按键模式:按下按键,小车可以前后左右地运动 自动模式:根据红外传感器的状态,自行决定运动状态。检测到前方有物体时,车子移动,起到一个跟随的效果。 演示视频如下: 51单片机智能避障…...
人工智能学习与实训笔记(六):百度飞桨套件使用方法
目录 八、百度飞桨套件使用 8.1 飞桨预训练模型套件PaddleHub 8.1.1 一些本机CPU可运行的飞桨预训练简单模型(亲测可用) 8.1.1.1 人脸检测模型 8.1.1.2 中文分词模型 8.1.2 预训练模型Fine-tune 8.2 飞桨开发套件 8.2.1 PaddleSeg - 图像分割 8…...

Linux第一个小程序-进度条
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言 一、回车和换行 二、行缓冲区概念 三、倒计时 四、进度条代码 版本一: 编辑 版本二: 总结 前言 世上有两种耀眼的光芒,一…...

YoloV8改进策略:Block改进|Mamba-UNet改进YoloV8,打造全新的Yolo-Mamba网络
摘要 本文尝试使用Mamba的VSSBlock替换YoloV8的Bottleneck,打造最新的Yolo-Mamba网络。 论文:《Mamba-UNet:用于医学图像分割的类似UNet的纯视觉Mamba网络》 在医学图像分析的最新进展中,卷积神经网络(CNN)和视觉转换器(ViT)都取得了显著的基准成绩。前者通过其卷积…...
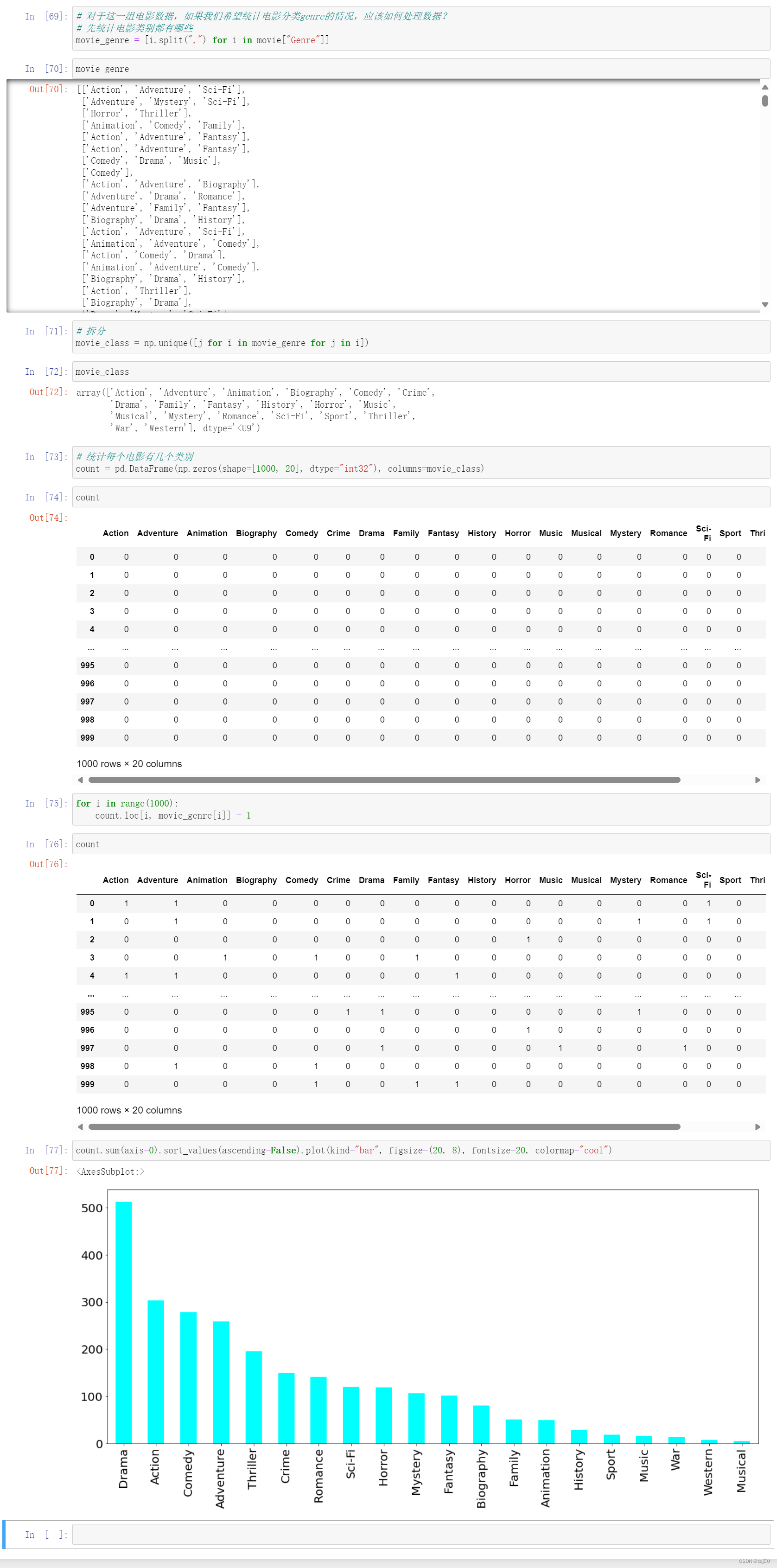
数据分析基础之《pandas(8)—综合案例》
一、需求 1、现在我们有一组从2006年到2016年1000部最流行的电影数据 数据来源:https://www.kaggle.com/damianpanek/sunday-eda/data 2、问题1 想知道这些电影数据中评分的平均分,导演的人数等信息,我们应该怎么获取? 3、问题…...

(17)Hive ——MR任务的map与reduce个数由什么决定?
一、MapTask的数量由什么决定? MapTask的数量由以下参数决定 文件个数文件大小blocksize 一般而言,对于每一个输入的文件会有一个map split,每一个分片会开启一个map任务,很容易导致小文件问题(如果不进行小文件合并&…...

define和typedef
目录 一、define 二、typedef 三、二者之间的区别 一、define 在我们写代码的日常中,经常会用到define去配合数组的定义使用 #define N 10 arr[N]{0}; define不仅仅能做这些 #define是一种宏,我们首先来了解一下宏定义。 宏定义一般作用在C语言的预…...
SpringCloud之Nacos用法笔记
SpringCloud之Nacos注册中心 Nacos注册中心nacos启动服务注册到Nacosnacos服务分级模型NacosRule负载均衡策略根据集群负载均衡加权负载均衡Nacos环境隔离-namespace Nacos与eureka的对比临时实例与非临时实例设置 Nacos配置管理统一配置管理微服务配置拉取配置自动刷新远端配置…...
【c++】拷贝构造函数
1.特征 1.拷贝构造函数是构造函数的一个重载形式。 2.若显示定义了拷贝构造函数,编译器就不会自动生成构造函数了。 3.拷贝构造函数的参数只有一个且必须是类型对象的引用,使用传值方式编译器直接报错,因为会引发无穷递归调用。 4.若未显…...
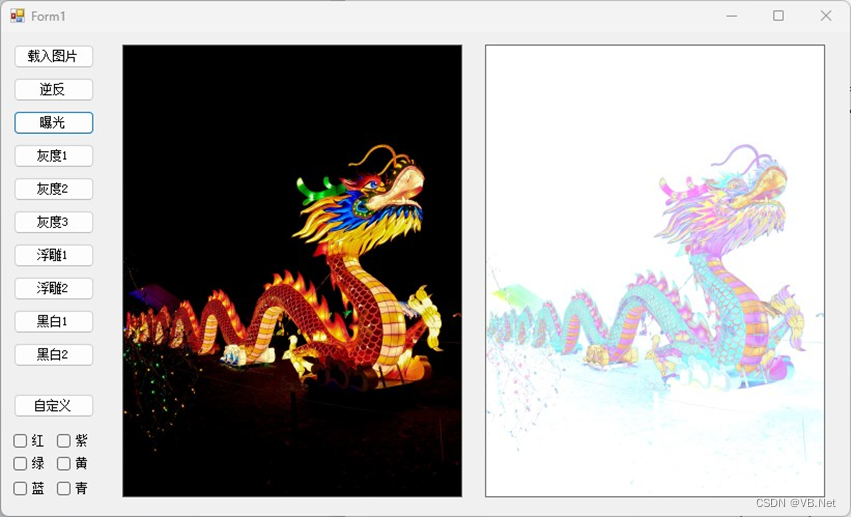
17.3.1.2 曝光
版权声明:本文为博主原创文章,转载请在显著位置标明本文出处以及作者网名,未经作者允许不得用于商业目的。 基本算法:先定义一个阈值,通常取得是128 原图像:颜色值color(R,G&#…...

终极Koikatu游戏增强补丁:200+模组与完整汉化一键安装指南
终极Koikatu游戏增强补丁:200模组与完整汉化一键安装指南 【免费下载链接】KK-HF_Patch Automatically translate, uncensor and update Koikatu! and Koikatsu Party! 项目地址: https://gitcode.com/gh_mirrors/kk/KK-HF_Patch KK-HF Patch是专为Koikatu&a…...

高效检索句子:基于 SQLite FTS5 的关键词快速匹配方案
std::filesystem::replace_extension 仅修改路径对象的逻辑表示,不更改磁盘文件;真正改后缀需配合 fs::rename,且须检查目标是否存在、文件是否为常规文件,并注意跨卷、文件占用等系统限制。std::filesystem::replace_extension 为…...

开源智能激活方案:KMS_VL_ALL_AIO如何彻底解决Windows和Office激活难题
开源智能激活方案:KMS_VL_ALL_AIO如何彻底解决Windows和Office激活难题 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 你是否曾为Windows系统或Office办公软件未激活而烦恼…...

基于规则与启发式的Claude对话内容自动Markdown格式化工具实现
1. 项目概述与核心价值最近在折腾文档自动化生成工具时,发现了一个挺有意思的项目,叫looseleaf-acrylic560/claude-md-generator。乍一看这个名字,你可能觉得它就是个普通的Markdown生成器,但实际用下来,我发现它远不止…...

如何免费快速解锁电脑隐藏性能:UXTU硬件调优终极指南
如何免费快速解锁电脑隐藏性能:UXTU硬件调优终极指南 【免费下载链接】Universal-x86-Tuning-Utility Unlock the full potential of your Intel/AMD based device. 项目地址: https://gitcode.com/gh_mirrors/un/Universal-x86-Tuning-Utility 还在为电脑性…...
)
别再为无人机航拍小目标漏检发愁了!用SAHI+YOLOv5n搞定高清图像识别(附完整代码)
无人机航拍小目标检测实战:SAHIYOLOv5n的高效解决方案 在广袤的农田上空,一架无人机正在执行例行巡检任务。高清摄像头捕捉到的画面中,几个微小的黑点引起了操作员的注意——那是几株感染病虫害的作物,它们在整幅图像中只占据不到…...

实战指南:vCenter Server Appliance 核心账户密码恢复与安全策略配置
1. 紧急救援前的准备工作 遇到vCenter Server Appliance密码丢失的情况,千万别急着操作。我见过太多同行因为心急直接动手,结果把问题搞得更复杂。咱们先做好这三件事,能避免90%的意外状况。 首先必须创建虚拟机快照,这个步骤的重…...

FPGA高速ADC数据采集实战——基于AD9253 LVDS接口与ISERDESE2设计
1. AD9253高速ADC核心特性解析 AD9253这颗14位125MSPS四通道ADC芯片,在通信和医疗成像领域堪称经典。我经手过的多个雷达项目中,它的信噪比表现总能带来惊喜——75.3dBFS的实测数据比手册标称值还要稳定。但真正让工程师们又爱又恨的,是它那个…...

All in Token,三个运营商建Token工厂,中国移动跟进Token经营 三大运营商争夺AI阵地
随着Token(词元)经营战略的密集落地,三大运营商在AI领域的竞争愈发激烈。在日前举行的2026移动云大会上,中国移动正式发布了Token运营生态体系与移动模型服务平台MoMA,宣布接入超300款模型,并通过Token集约…...

从分布式到可分发:大规模软件制品分发架构设计与实践
1. 项目概述:从“分布式”到“可分发”的思维跃迁最近在梳理团队内部的基础设施时,又翻出了distr-sh/distr这个项目。说实话,第一次看到这个仓库名,我下意识地把它归类为又一个“分布式系统”框架。但当我真正点进去,花…...