STM32之关门狗
看门狗介绍
在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的模块或者芯片俗称“看门狗“(watchdog)。
有一个程序员叫张三,老板养了一条狗用来监督张三持续工作,张三需要定时喂养这条狗以确保老板知道自己一直在努力工作,如果有一次没有喂养这条狗,那么狗就会反骨咬死张三,张三就会重新升天投胎为程序员继续工作,同时老板还是派这条狗来监督张三的工作,张三同样也需要定时喂养他,往复持续。
独立看门狗(IWDG)
独立看门狗工作在主程序之外,能够完全独立工作,它的时钟是专用的低速时钟(LSI),由VDD电压供电,在停止模式和待机模式下仍能工作。
独立看门狗的本质
独立看门狗是一个12位的递减计数器,当计数器的值从某个值一直减到0的时候,系统就会产生-个复位信号,即IWDG_RESET。
如果在计数没减到0之前,刷新了计数器的值的话,那么就不会产生复位信号,这个动作就是我们经常说的喂狗。
独立看门狗的时钟
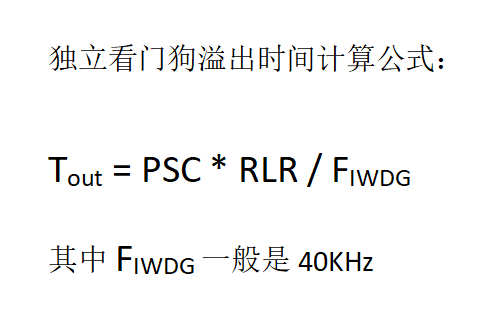
独立看门狗的时钟由独立的RC振荡器LSI提供,即使主时钟发生故障它仍然有效,非常独立。启用IWDG后,LSI时钟会自动开启。MCU内部的RC频率会在30kHz到60kHz之间变化,因此 LSI时钟频率并不精确,一般设定为40kHz。
LSI经过一个8位的预分频器得到计数器时钟。
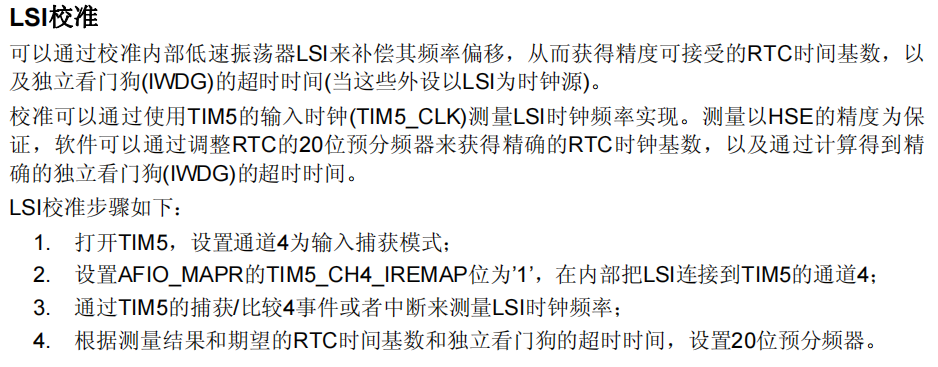
想要获得独立看门狗相对精准的超时时间可以对LSI进行校准
独立看门狗框图
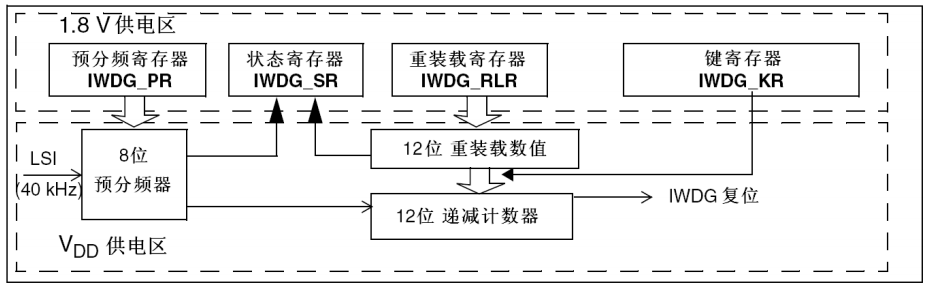
键寄存器(IWDG_KR)
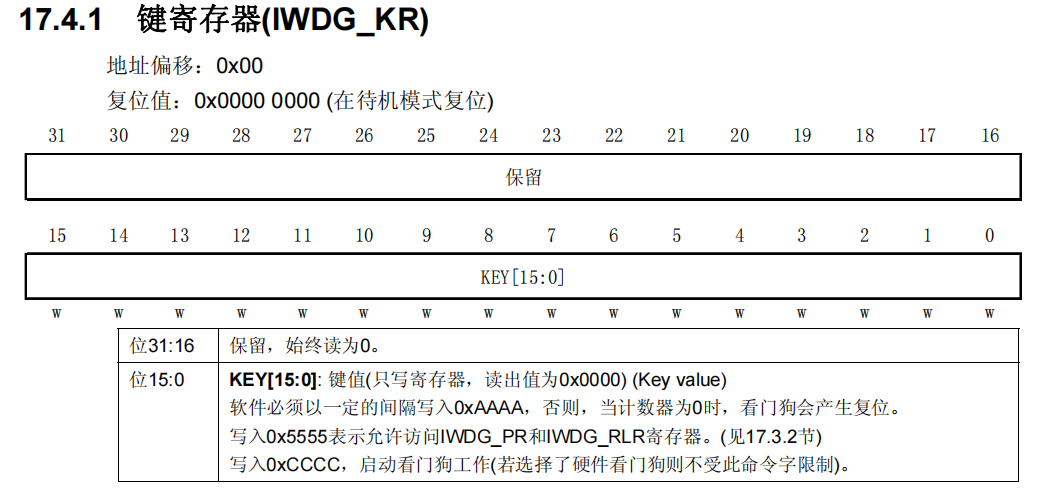
独立看门狗的控制寄存器,主要有三种控制方式。
预分频寄存器(IWDG_PR)
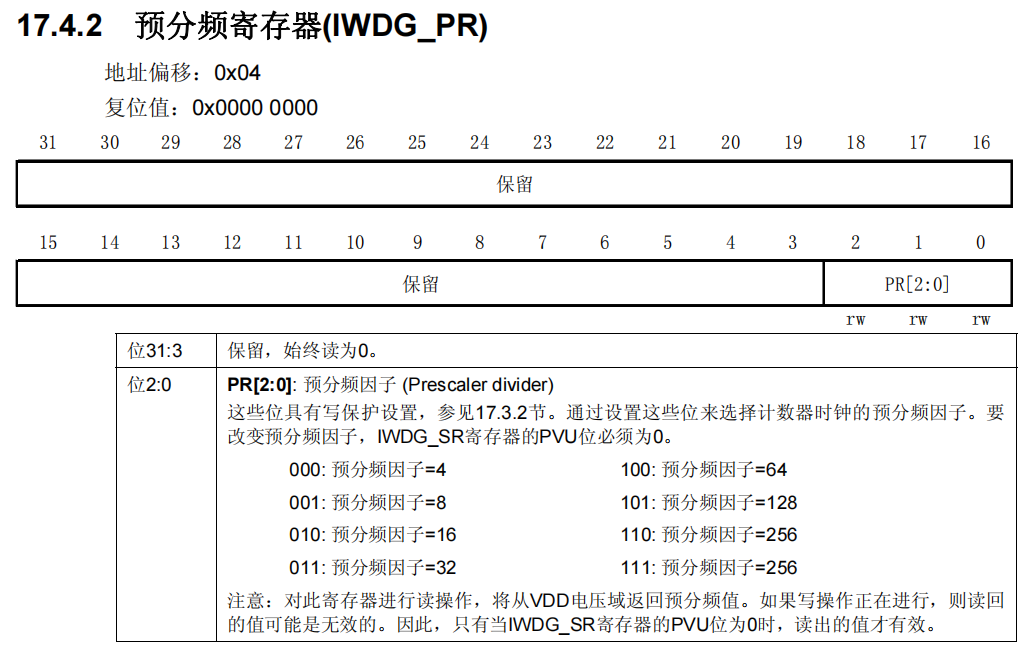
分频系数算法:PSC = 4 * 2^prer
prer是IWDG_PR的值,即当IWDG_PR为010时,即prer为2
重装载寄存器(IWDG_RLR)
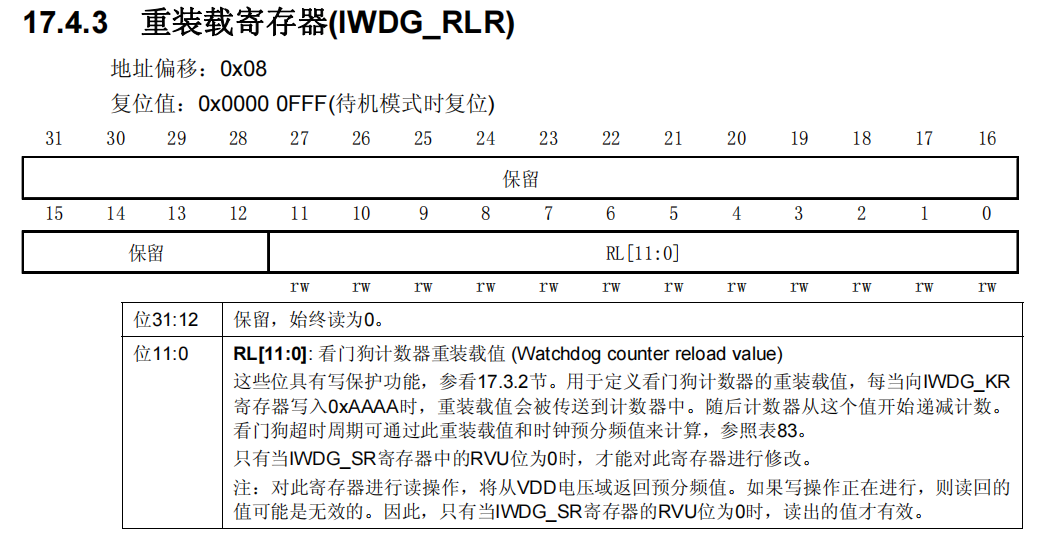
用于存放重装载值,最大值为4096,该寄存器的值的大小决定了独立看门狗的溢出时间
独立看门狗的溢出时间与PSC和RLR的值有关,溢出时间计算公式如下
独立看门狗实验
开启独立看门狗,溢出时间为一秒,使用按键进行喂狗,不喂狗时反复执行main函数,导致LED1闪烁,喂狗时只执行一次main函数,LED1常亮。
独立看门狗喂狗函数HAL_IWDG_Refresh()
原型:HAL_StatusTypeDef HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg)
参数:
IWDG_HandleTypeDef *hiwdg:独立看门狗句柄
实例:HAL_IWDG_Refresh(&hiwdg);
使用STM32CubeMX创建工程
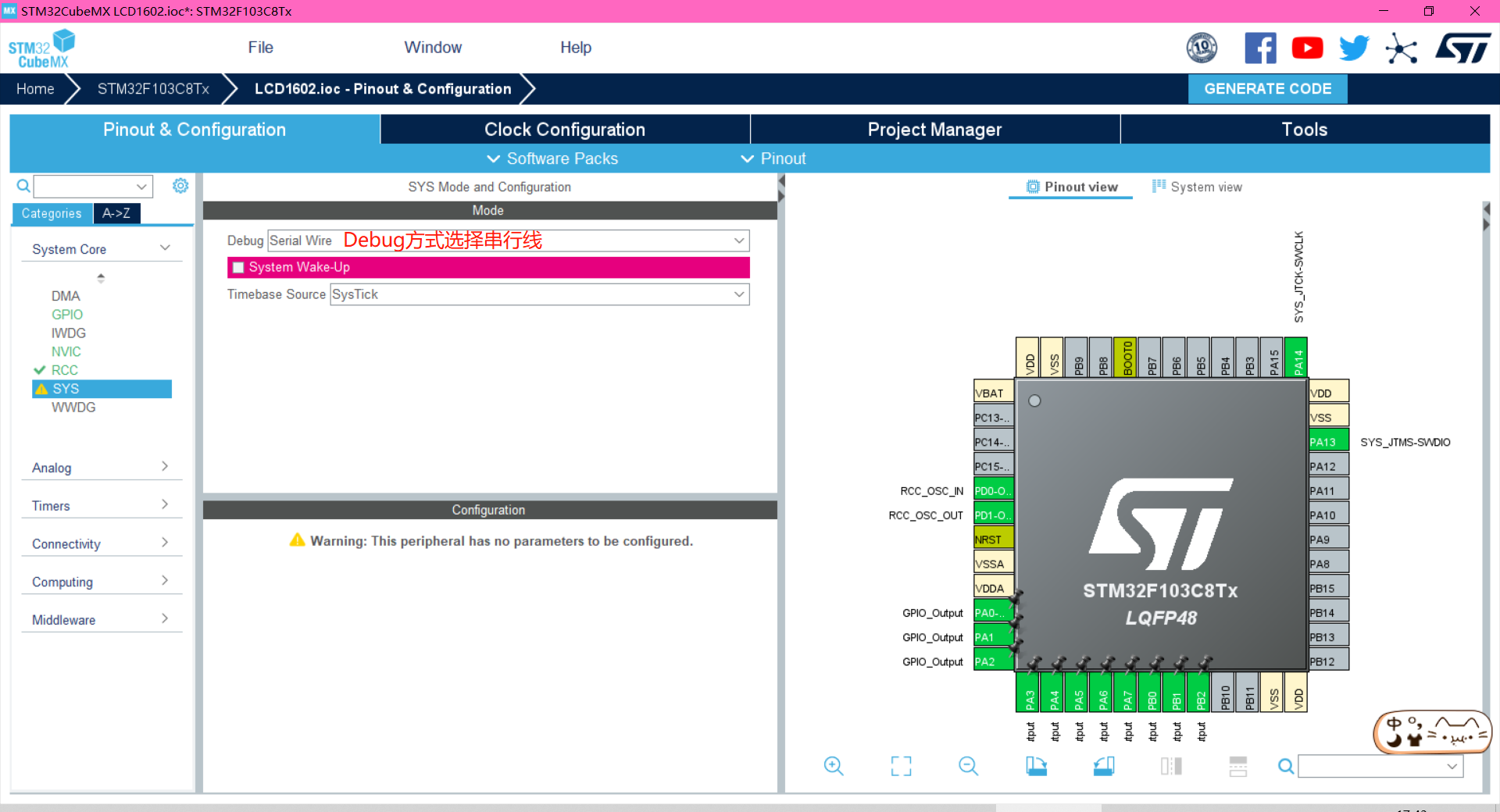
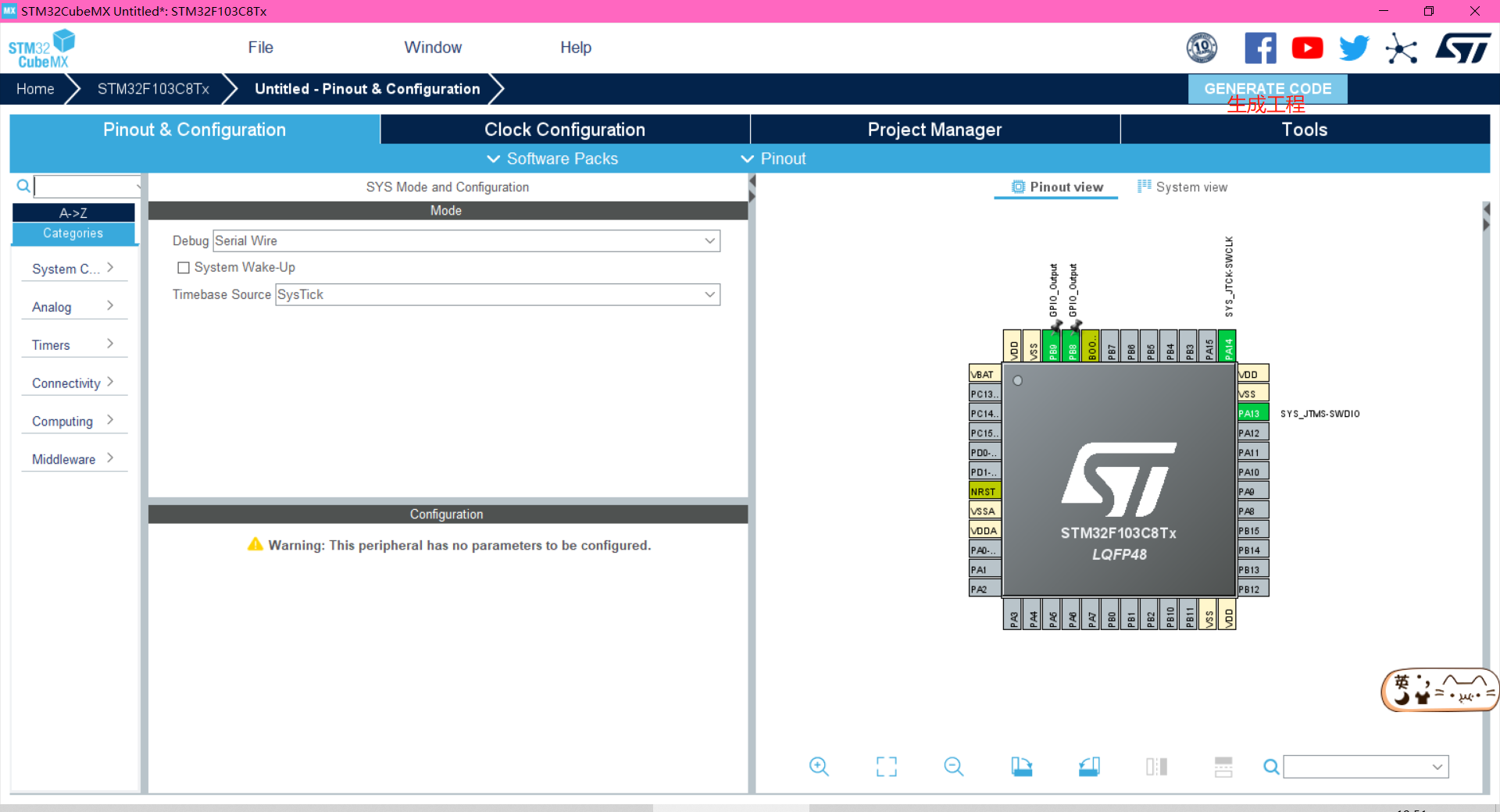
配置SYS
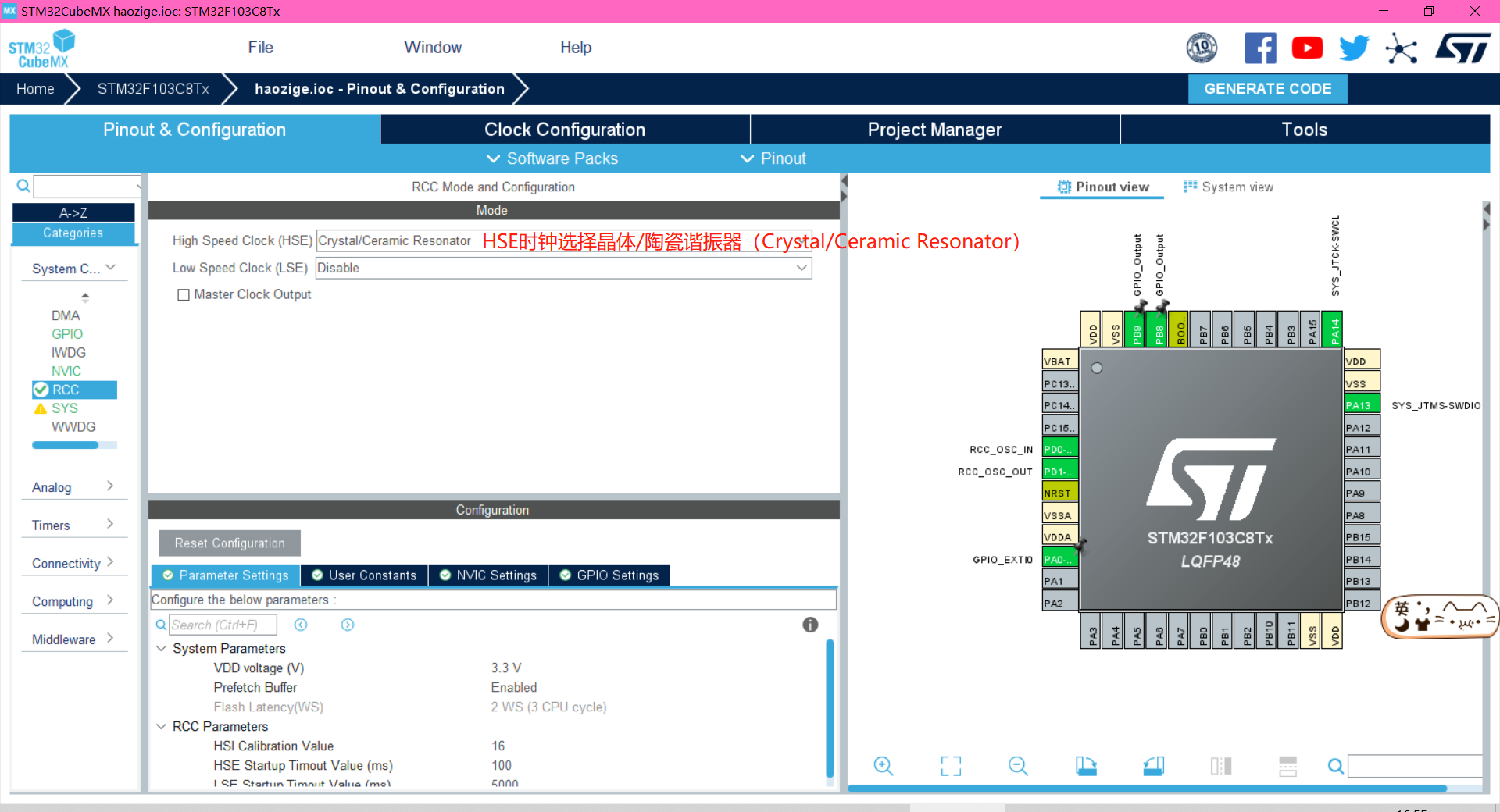
配置RCC
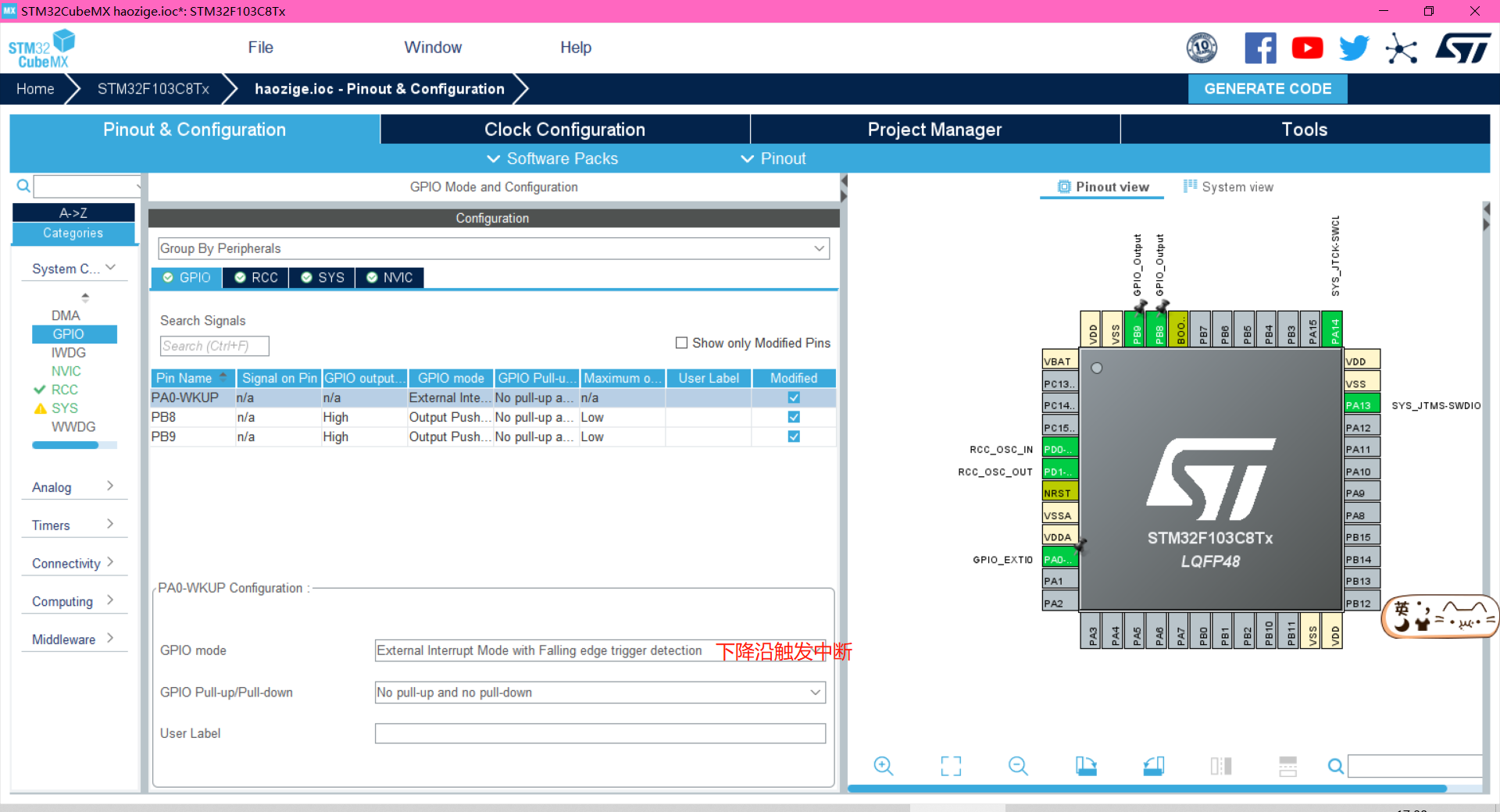
配置GPIO
PB9都配置为输出高电平,PA0配置为下降沿触发中断
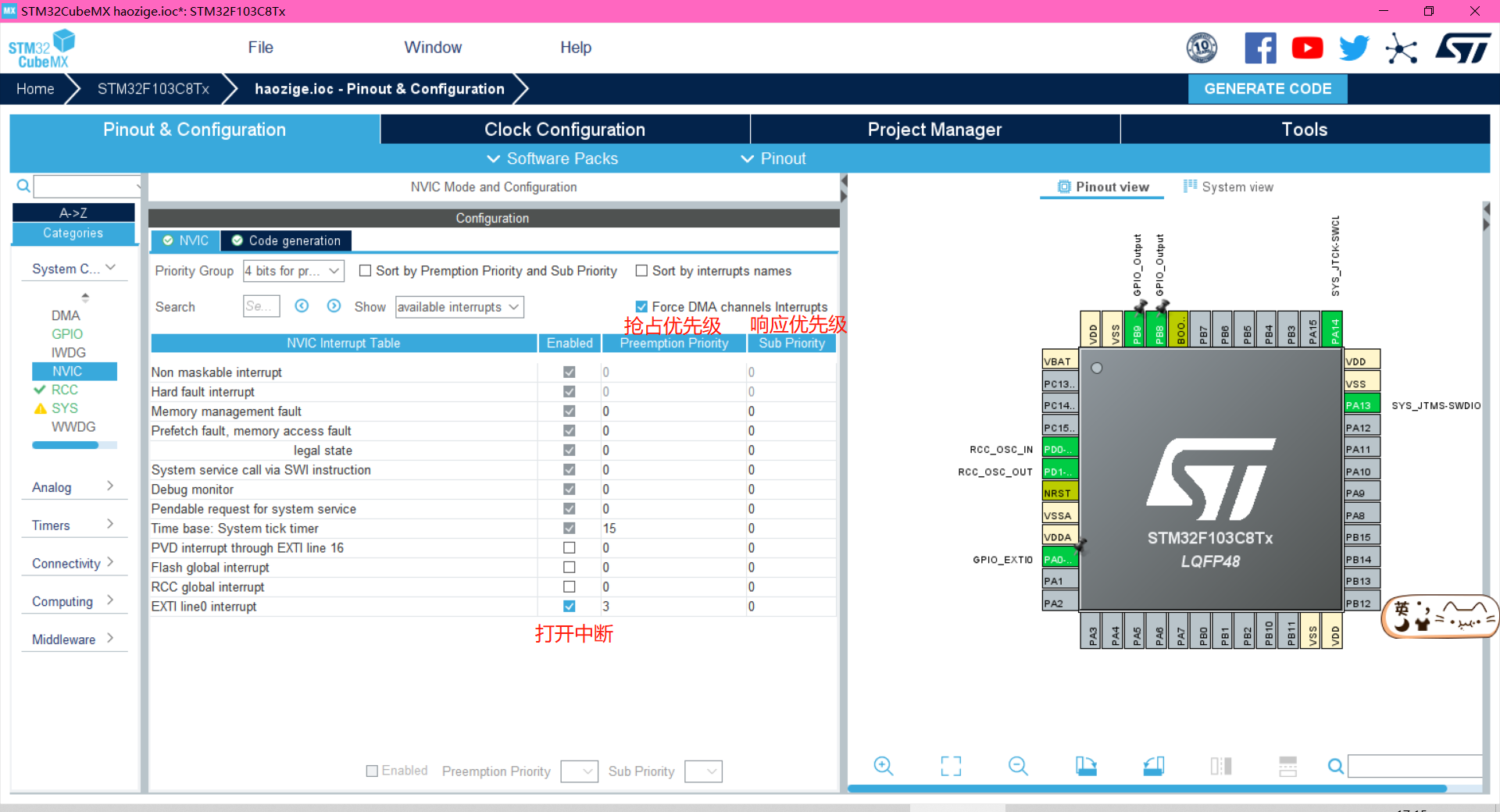
配置NVIC
将PA0的中断的抢占优先级配置为3,因为待会要在中断处理函数中调用HAL_Delay(),而该函数要用到滴答定时器,而在程序初始化时默认将滴答定时器的中断优先级设置为最低,因此其他中断源很容易将其打断。
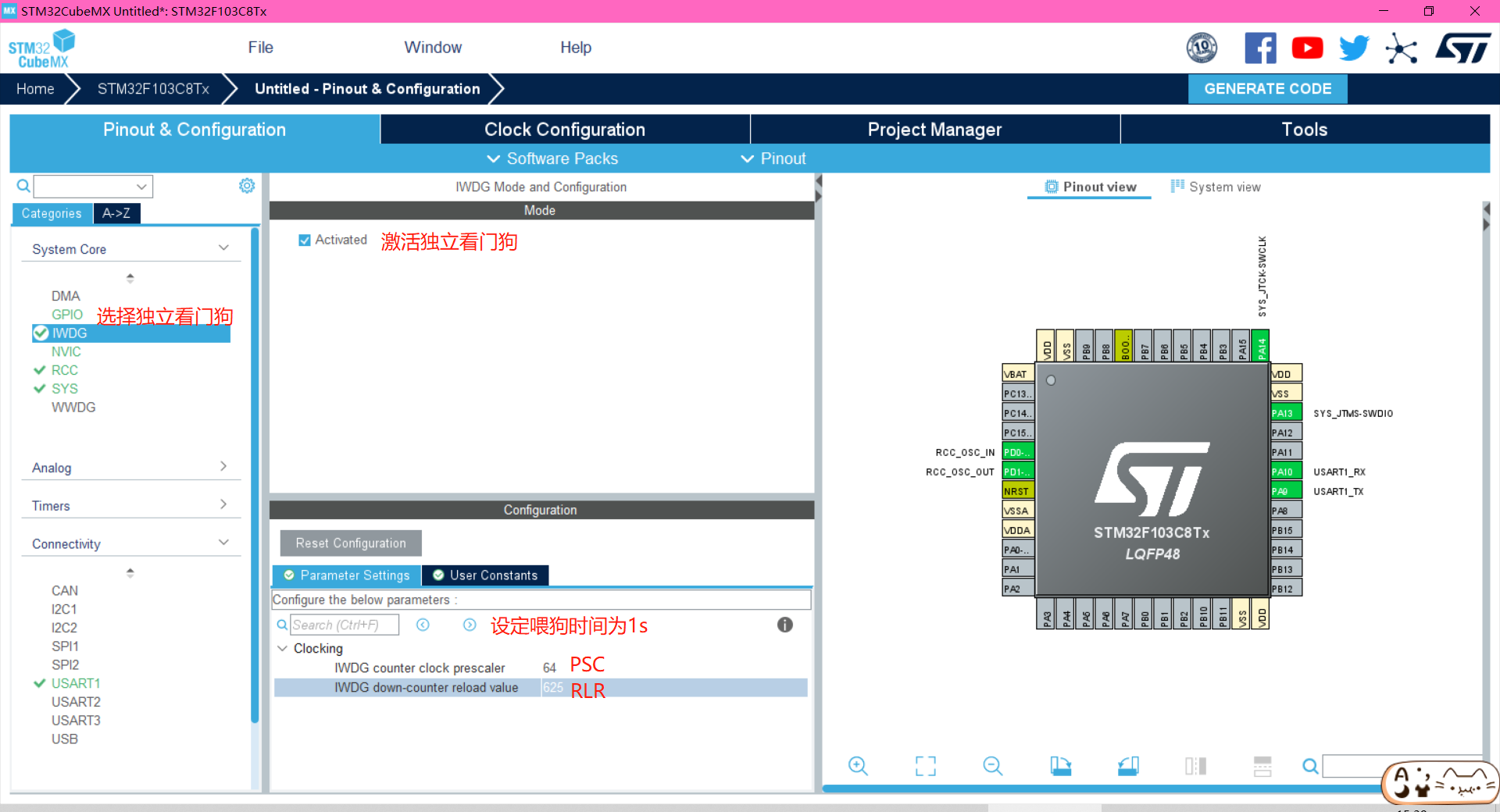
配置IWDG
配置工程名称、工程路径
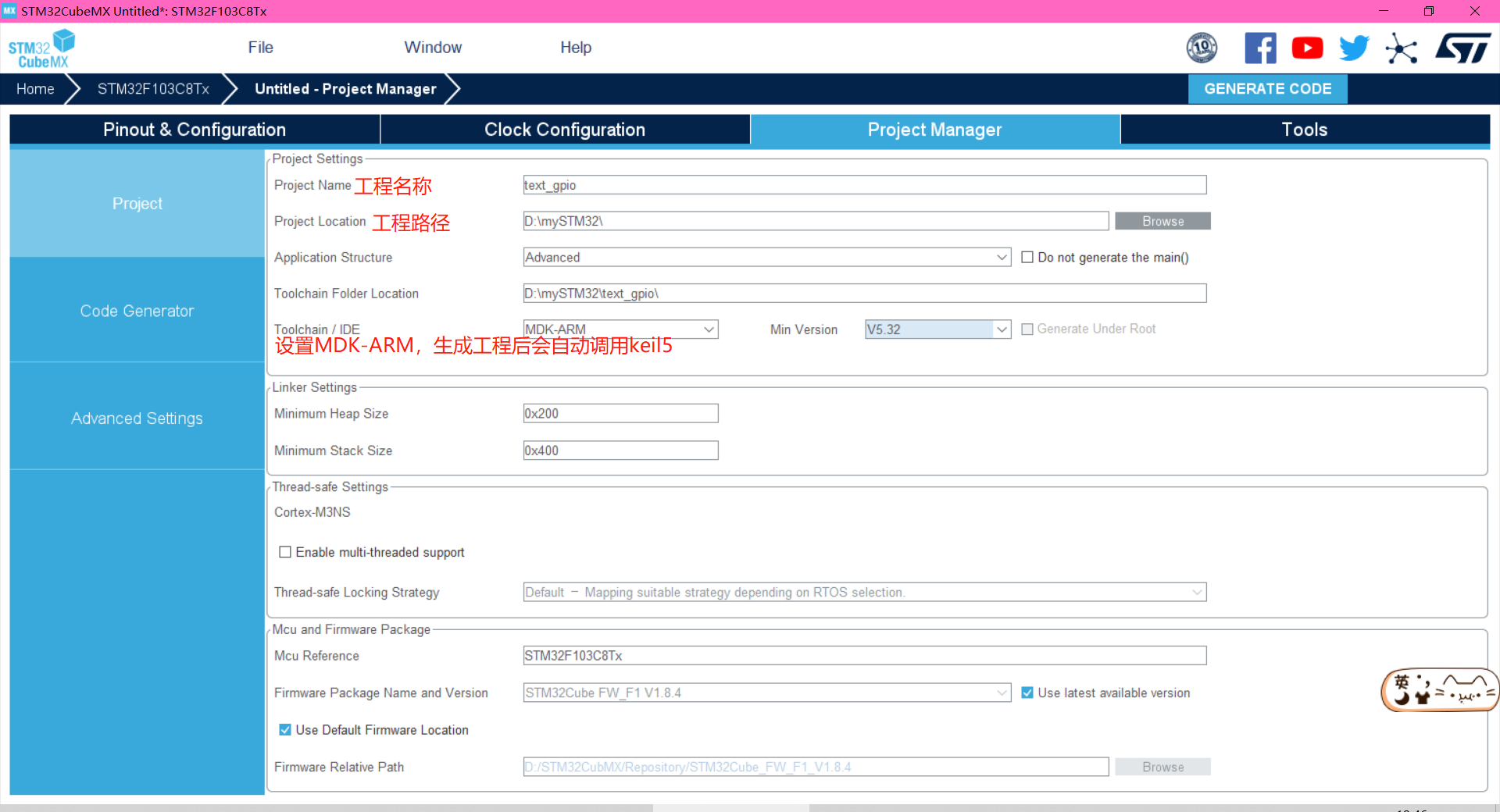
选择固件库
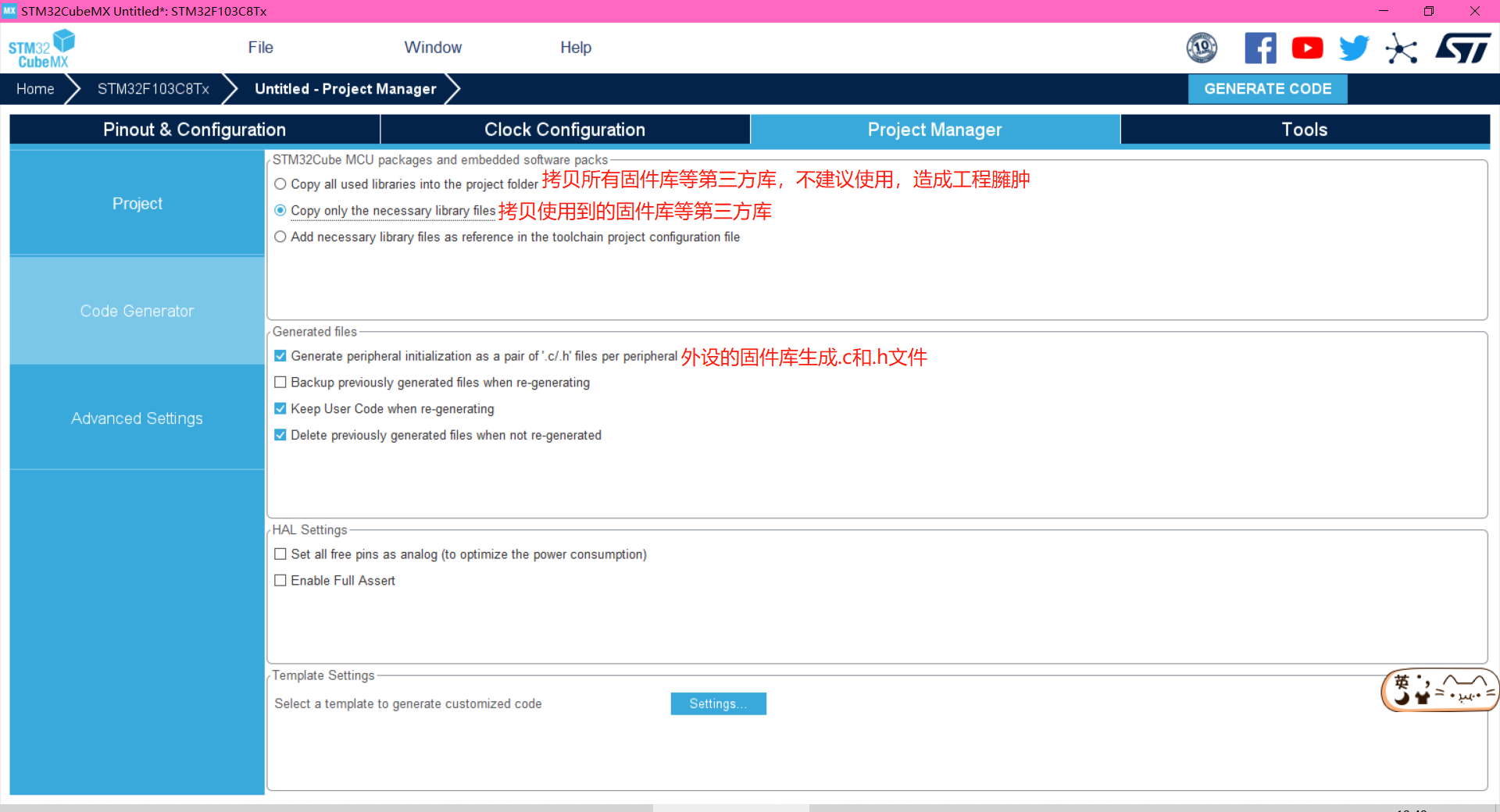
生成工程
main函数编写
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "iwdg.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{//按键PA0触发的中断if(GPIO_Pin == GPIO_PIN_0){HAL_Delay(50);if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET){HAL_IWDG_Refresh(&hiwdg);//喂狗}}
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_IWDG_Init();/* USER CODE BEGIN 2 */HAL_NVIC_SetPriority(SysTick_IRQn,0,0); //把滴答定时器的抢占优先级和响应优先级都设置为最高HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_RESET);HAL_Delay(500);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_SET);HAL_Delay(500);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///如果没喂狗的话,就不会执行该循环,即灯不会常亮HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_RESET);}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSI|RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.LSIState = RCC_LSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
窗口看门狗
窗口看门狗用于监测单片机程序运行时效是否精准,主要检测软件异常,一般用于需要精准检测程序运行时间的场合。
窗口看门狗的本质
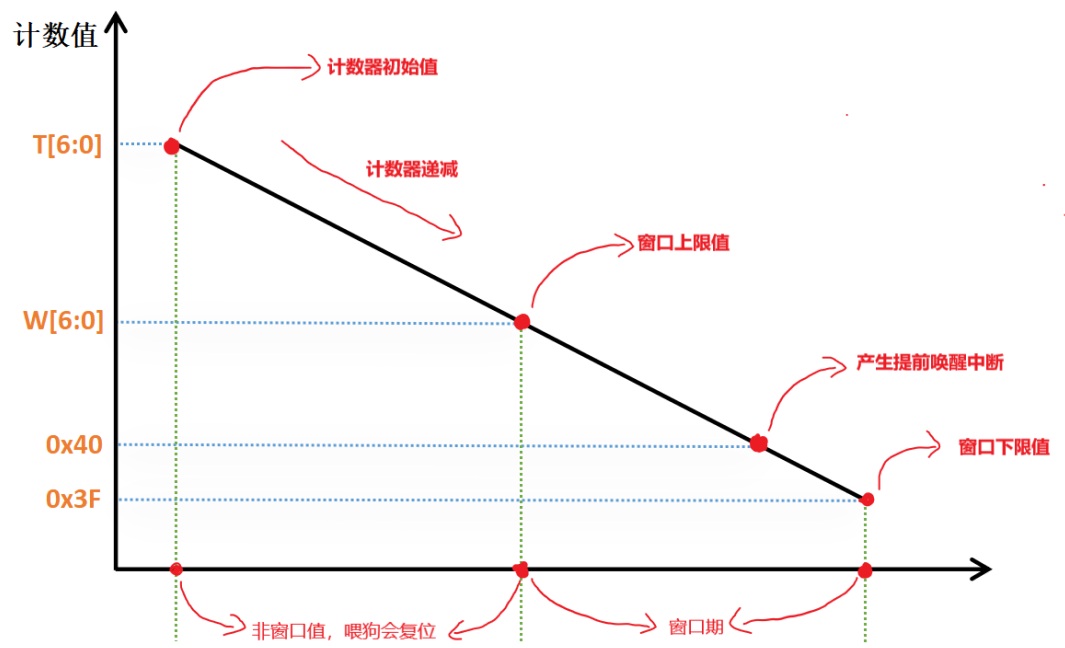
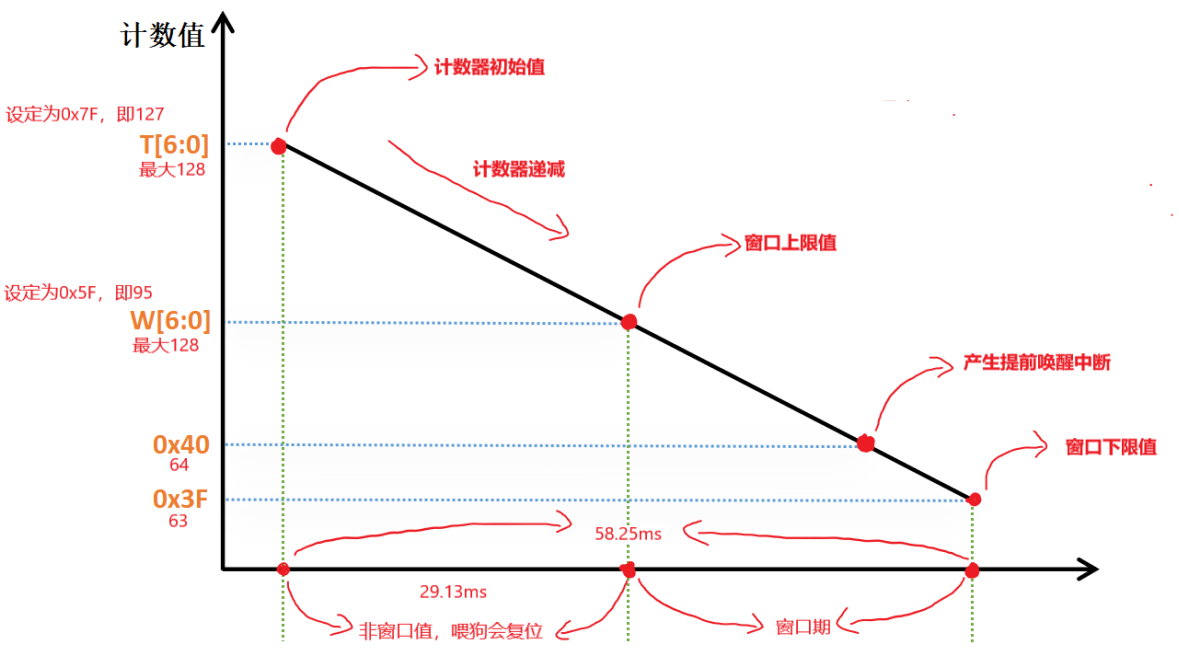
是一个能产生系统复位信号和提前唤醒中断的6位计数器。
产生复位条件:
当递减计数器值递减减到0x3F时复位(即T6位跳变到0)
窗口值在0x3F~W[6:0](0x7F)之间,不在窗口值内喂狗就会复位
产生中断条件:
当计数器递减到0x40时可以产生提前唤醒中断(EWI)。
在窗口期内重装载计数器的值,防止复位,也就是所谓的喂狗。
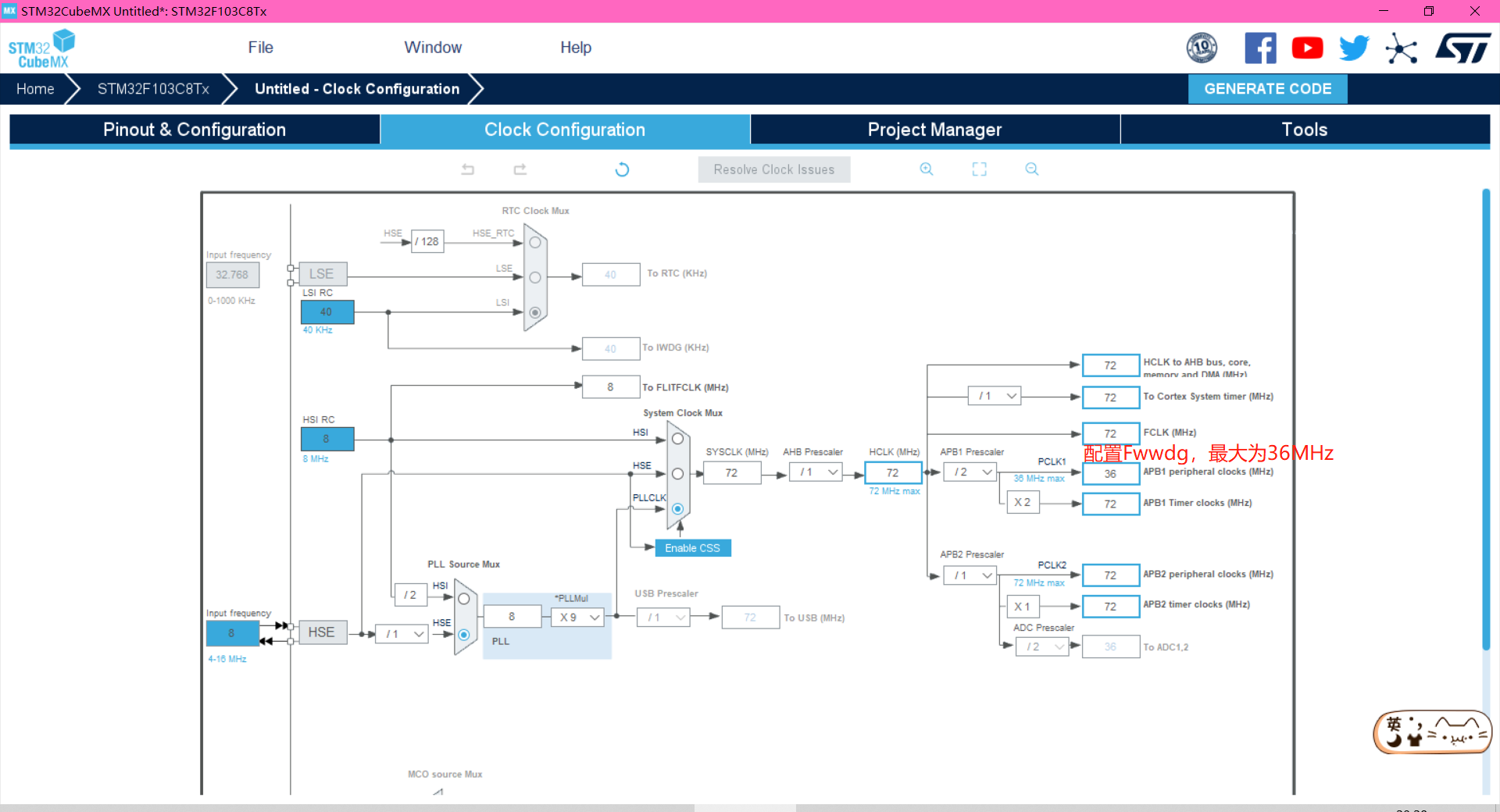
窗口看门狗的时钟
窗口看门狗使用了RCC的时钟PCLK1,最高为36MHz
窗口看门狗框图
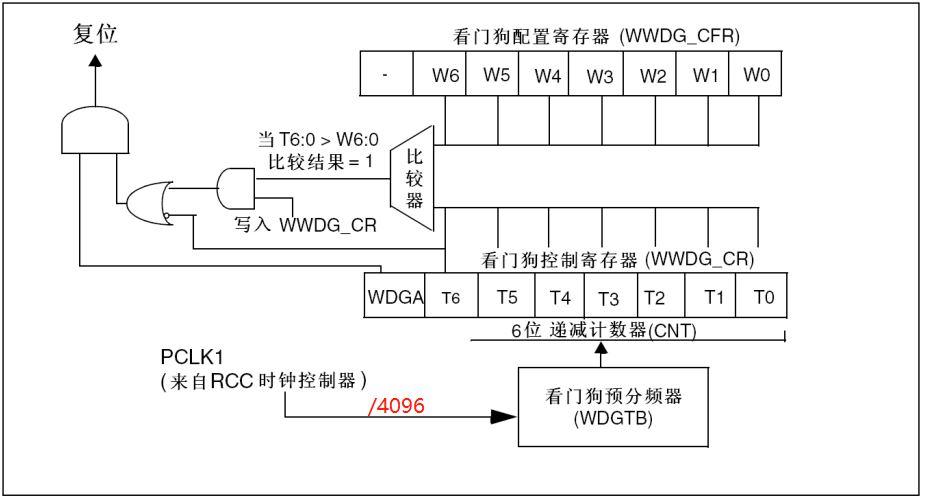
控制寄存器(WWDG_CR)
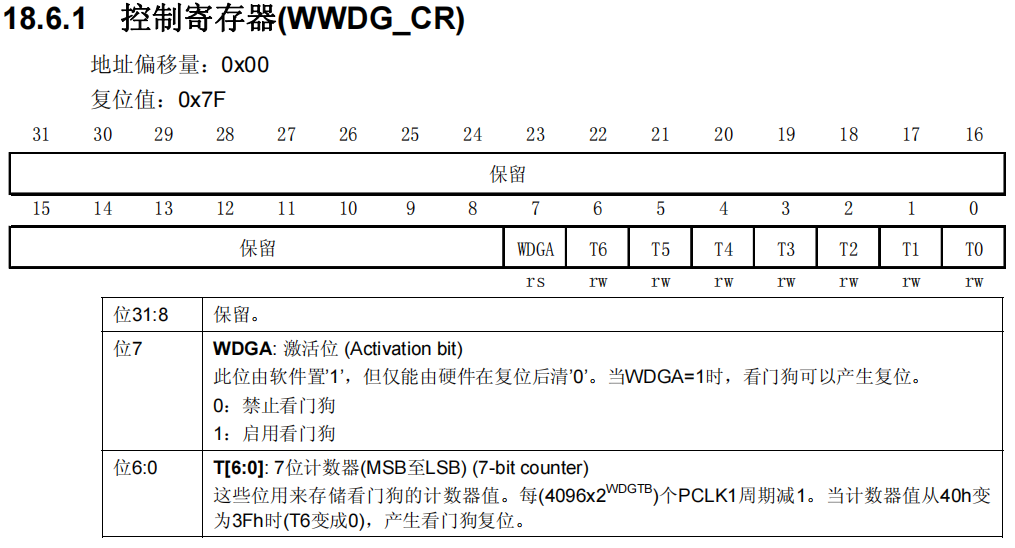
控制窗口关门狗是否开启和配置窗口关门狗计数器初始值。
当计数器值从40h变为3Fh时(T6变成0),产生看门狗复位。
配置寄存器(WWDG_CFR)
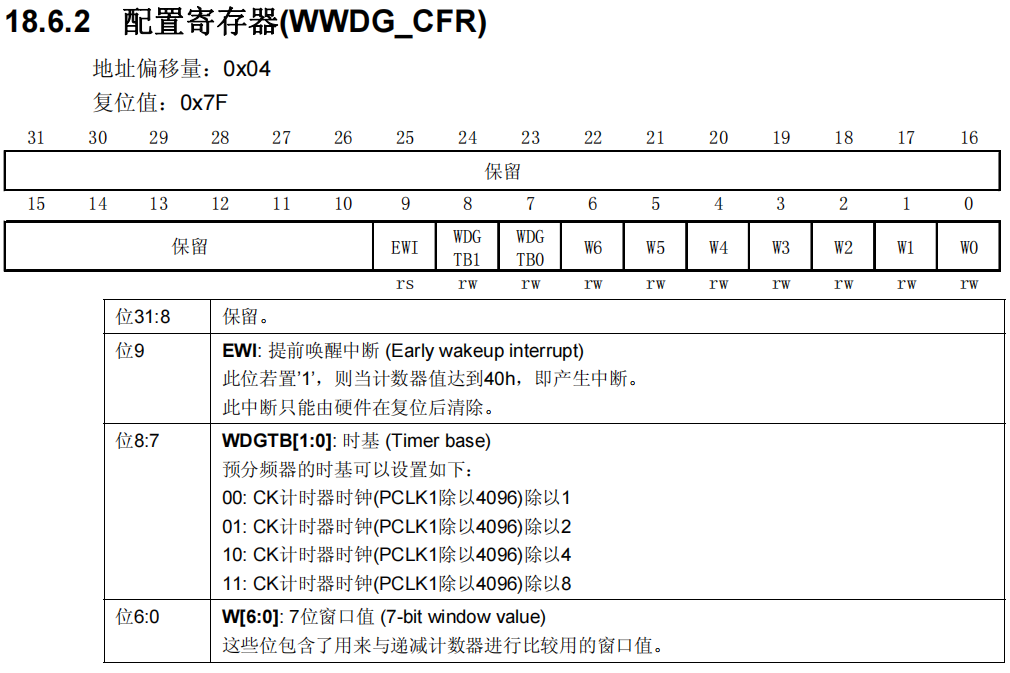
配置窗口关门狗的窗口上限值和配置预分频器系数值
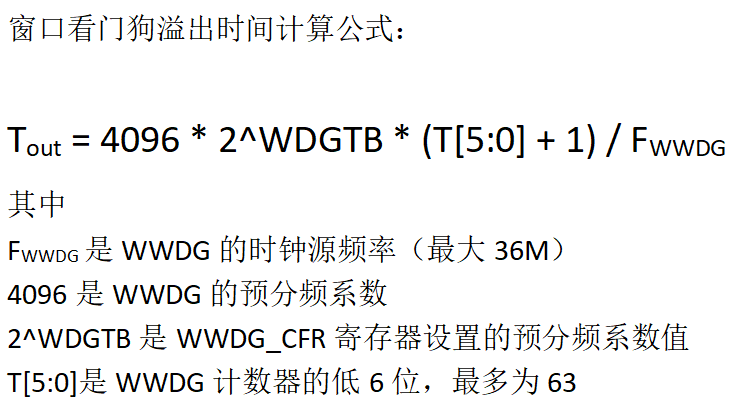
窗口看门狗的溢出时间
状态寄存器(WWDG_SR)
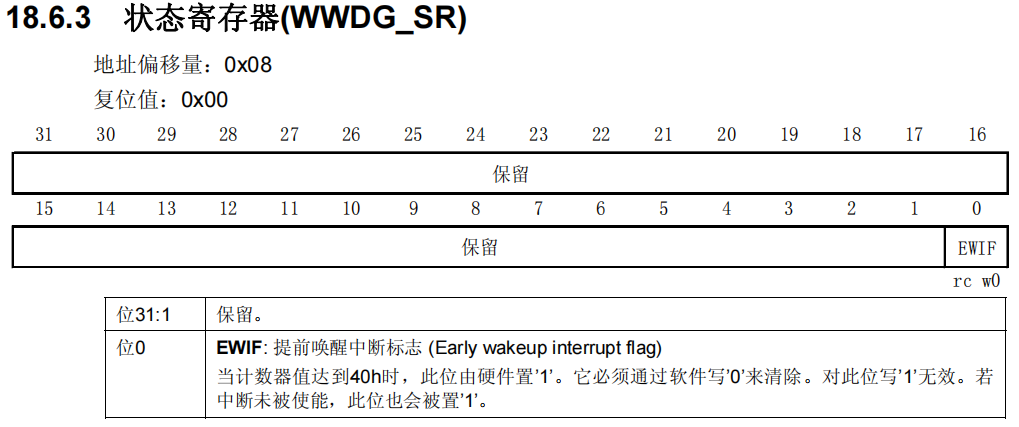
配置窗口看门狗的提前唤醒中断。
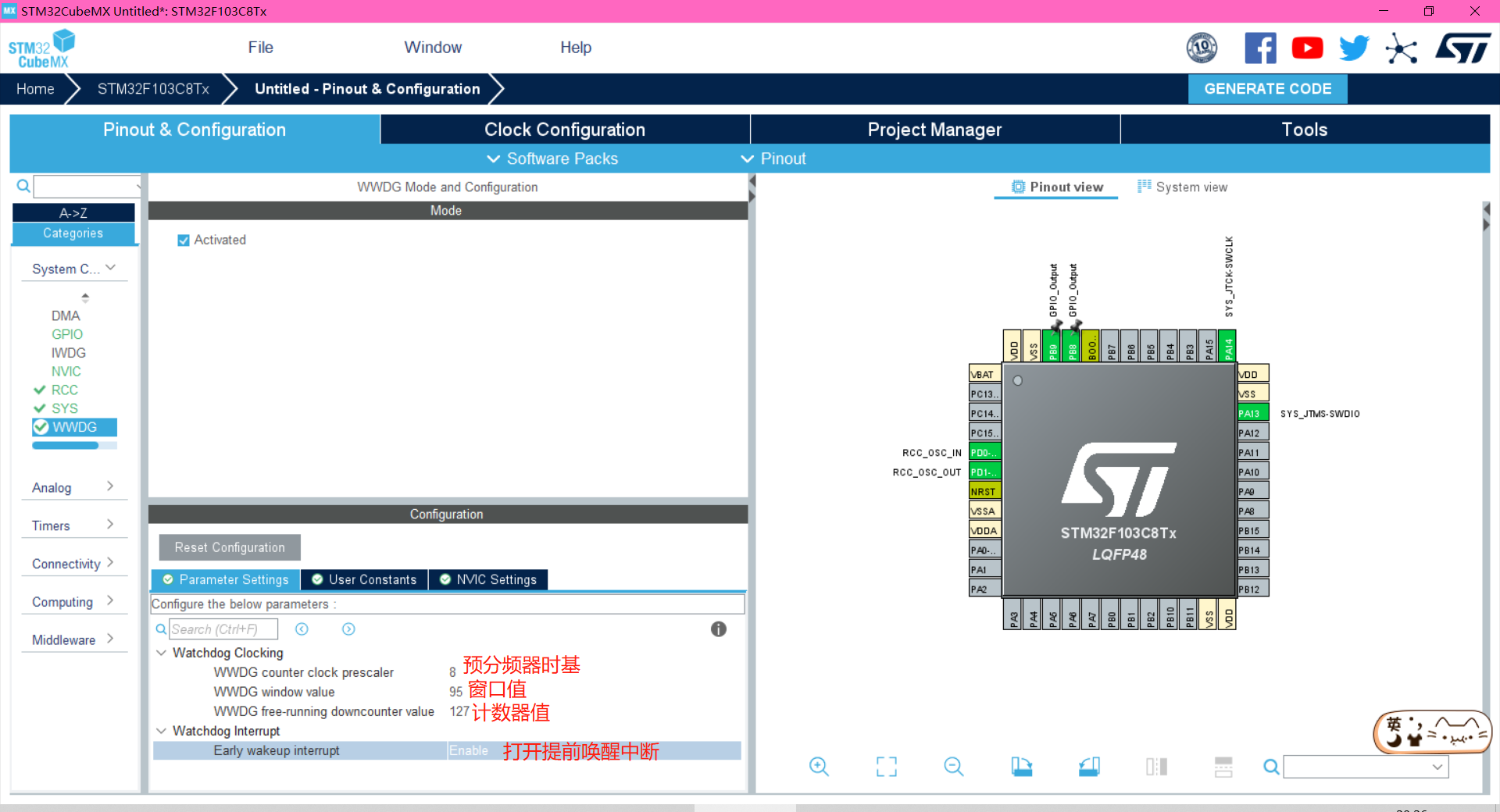
窗口看门狗实验
开启窗门看门狗,计数器值设置为0x7F(127),窗口值设置为0x5F(95),预分频器的时基为8,。不喂狗时反复执行main函数,导致LED1闪烁,喂狗时只执行一次main函数,LED1常亮。在提前唤醒中断服务函数进行喂狗,防止程序复位,LED1常亮,同时翻转LED2的状态。
窗口看门狗喂狗函数HAL_StatusTypeDef HAL_WWDG_Refresh()
原型:HAL_StatusTypeDef HAL_WWDG_Refresh(WWDG_HandleTypeDef *hwwdg)
参数:
WWDG_HandleTypeDef *hwwdg:窗门看门狗句柄
实例:HAL_WWDG_Refresh(hwwdg);
使用STM32CubeMX创建工程
配置SYS
配置RCC
配置GPIO
PB9、PB8都配置为输出高电平
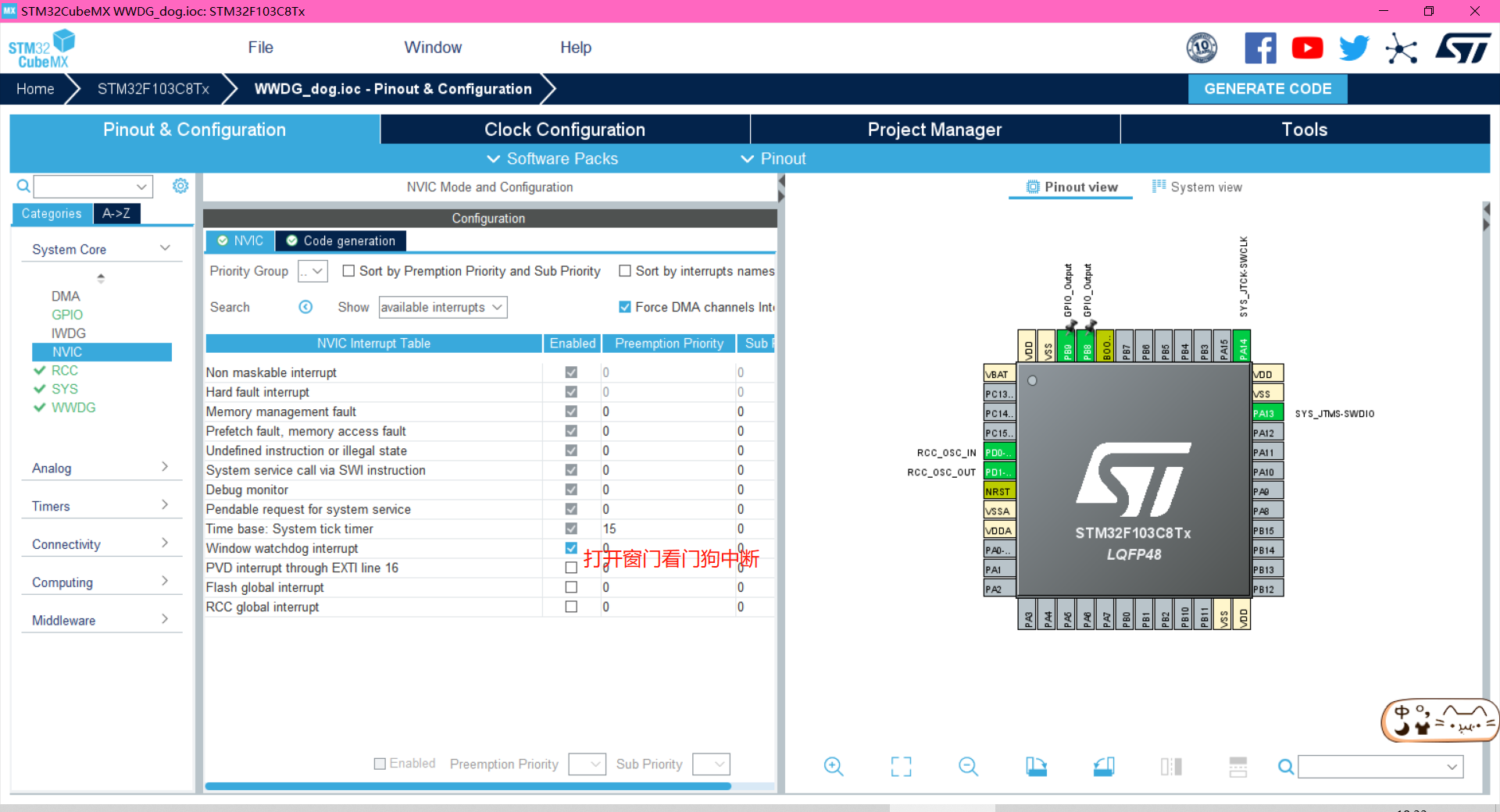
配置NVIC
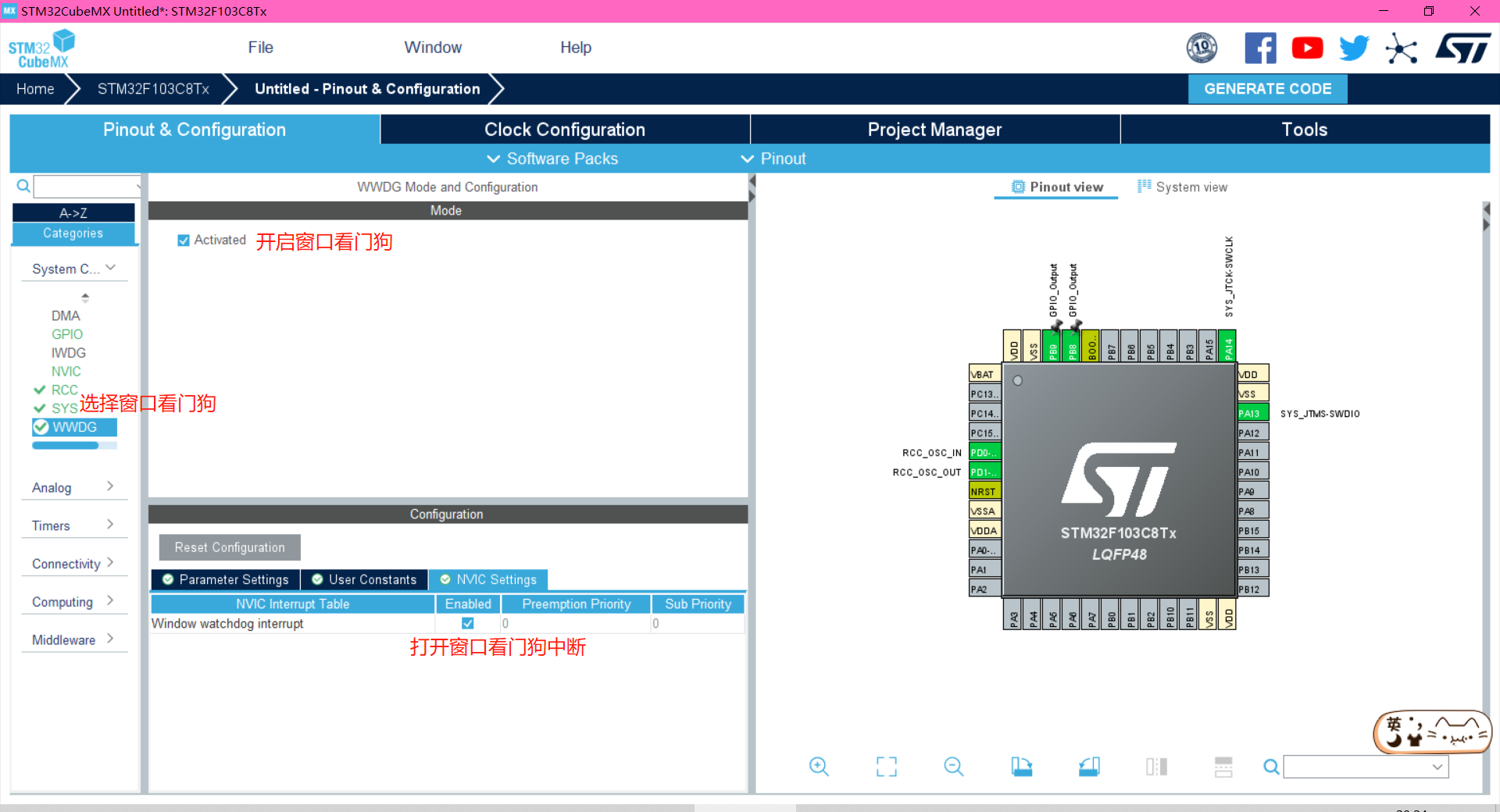
配置WWDG
配置工程名称、工程路径
选择固件库
生成工程
main函数编写
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "wwdg.h"
#include "gpio.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD *//* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *///窗口看门狗的提前唤醒中断的中断处理函数
void HAL_WWDG_EarlyWakeupCallback(WWDG_HandleTypeDef *hwwdg)
{HAL_WWDG_Refresh(hwwdg); //及时喂狗防止程序复位HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9);
}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_WWDG_Init();/* USER CODE BEGIN 2 */HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);HAL_Delay(500);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);HAL_Delay(500);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///如果没喂狗的话,就不会执行该循环,即LED1不会常亮HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
独立看门狗和窗口看门狗的异同点
IWDG最适合应用于那些需要看门狗作为一个在主程序之外,能够完全独立工作,并且对时间精度要求较低的场合。
WWDG最适合那些要求看门狗在精确计时窗口起作用的应用程序。
对比点 | 独立看门狗 | 窗口看门狗 |
时钟源 | 独立时钟,LSI(40KHz),不精确 | PCLK1或PCLK3,精确 |
复位条件 | 递减计数到0 | 窗口期外喂狗或减到0x3F |
中断 | 没有中断 | 计数值减到0x40可产生中断 |
递减计数 器位数 | 12位(最大计数范围:4096~0) | 7位(最大计数范围:127~63) |
应用场合 | 防止程序跑飞,死循环,死机 | 检测程序时效,防止软件异常 |
相关文章:
STM32之关门狗
看门狗介绍在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入…...

Apollo控制部分1-- ControlComponent组件介绍
Apollo控制部分1-- ControlComponent组件介绍摘要一、ControlComponent1、启动文件解析2、ControlComponent()组件函数解析1)ControlComponent::ControlComponent() 构造函数2)ControlComponent::Init() 初始化函数(执行一次)3&am…...

0626-0631韩顺平Java Buffered字节处理流 学习笔记
如何去构建字节流package com.hspedu.outputstream_;import java.io.*;/*** author abner* version 1.0*/ public class BufferedCopy02 {public static void main(String[] args) {String srcFilePath "D:\\Users\\Pictures\\Camera Roll\\Pierre-Auguste_Renoir,_Le_Mo…...
【网络】序列化和反序列化
🥁作者: 华丞臧. 📕专栏:【网络】 各位读者老爷如果觉得博主写的不错,请诸位多多支持(点赞收藏关注)。如果有错误的地方,欢迎在评论区指出。 推荐一款刷题网站 👉 LeetCode刷题网站 文章…...

【代码随想录训练营】【Day32】第八章|贪心算法|122.买卖股票的最佳时机II |55. 跳跃游戏|45.跳跃游戏II
买卖股票的最佳时机II 题目详细:LeetCode.122 买卖股票的最佳时机,怎么都能够想出来个思路,假如我们每天都能预知明天的股票是涨是降,那么贪心策略就是在涨之前买股票,在降的前一天卖掉,这就是买卖股票的…...

constexpr 和 常量表达式
👀👀常量表达式 常量表达式是指值不会改变并且在编译过程就能得到计算结果的表达式。 字面值属于常量表达式,用常量表达式初始化的const对象也是常量表达式。 那么是什么来就决定是不是常量表达式呢?一个对象是不是常量表达式主要…...

Vue响应式原理————Object.defineProperty()和proxy的用法分享
Vue框架一个比较核心的功能就是我们的数据是响应式的,这样我们在修改数据的时候,页面会自动帮我们更新,那么想要实现这个功能就要实现对一个数据的劫持,即在取值和设置值的同时我们能够检测到即数据劫持。vue2响应式的实现原理所依…...

CSDN 编程竞赛三十四期题解
竞赛总览 CSDN 编程竞赛三十四期:比赛详情 (csdn.net) 本期的题目和第三十一期竞赛的题目竟然高度重合,真不知道该写点什么了。 不过,上次那道测试数据有bug的题已经修复了,答题过程挺顺利的,没有遇到新的问题。 竞…...

C#教程06 运算符
文章目录 一、算术运算符加法运算符(+)减法运算符(-)乘法运算符(*)除法运算符(/)二、逻辑运算符与运算符(&&)或运算符(||)非运算符(!)三、比较运算符等于运算符(==)大于运算符(>)小于运算符(<)大于等于运算符(>=)小于等于运算符(<=…...
pytest单元测试)
软测入门(六)pytest单元测试
pytest pytest是python的一种单元测试框架,同自带的unit test测试框架类似,但pytest更简洁高效。 单元测试: 测试 函数、类、方法能不能正常运行测试的结果是否符合我们的预期结果 安装 pip install -U pytest基本使用 通过pytest包使用…...
)
经典分类模型回顾5—DenseNet实现图像分类(matlab)
DenseNet,全称为Densely Connected Convolutional Networks,中文名为密集连接卷积网络,是由李沐等人在2017年提出的一种深度神经网络架构。 DenseNet旨在解决深度神经网络中的梯度消失问题和参数数量过多的问题,通过构建密集连接…...
基于flask+bootstrap+echarts+mysql的鱼村小馆订餐后台管理系统
📋 个人简介 💖 作者简介:大家好,我是阿牛,全栈领域优质创作者。😜📝 个人主页:馆主阿牛🔥🎉 支持我:点赞👍收藏⭐️留言Ὅ…...

Spark使用Log4j将日志发送到Kafka
文章目录自定义KafkaAppender修改log4j.properties配置启动命令配置添加参数启动之后可以在Kafka中查询发送数据时区问题-自定义实现JSONLayout解决自定义JSONLayout.java一键应用可能遇到的异常ClassNotFoundException: xxx.KafkaLog4jAppenderUnexpected problem occured dur…...
c++类与对象整理(上)
目录 1.类的引入 2.类的定义 3.类的访问限定符及封装 1)访问限定符 2)封装 4.类的作用域 5.类的实例化 6.类的对象大小的计算 1)类对象的存储方式 2)内存对齐和大小计算 编辑 7.类成员函数的this指针 1)…...
什么是镜像的元数据?)
Docker学习(十九)什么是镜像的元数据?
在 Docker 中,镜像的元数据是指与镜像相关的所有信息,包括镜像的名称和标签、作者、描述、创建日期、环境变量、命令等。这些信息都是通过 Dockerfile 或命令行创建和指定的。 镜像的元数据被存储在 Docker Registry 中,并在使用 docker pull…...
Python如何获取弹幕?给你介绍两种方式
前言 弹幕可以给观众一种“实时互动”的错觉,虽然不同弹幕的发送时间有所区别,但是其只会在视频中特定的一个时间点出现,因此在相同时刻发送的弹幕基本上也具有相同的主题,在参与评论时就会有与其他观众同时评论的错觉。 在国内…...

JAVA- AOP 面向切面编程 Aspect切面工具类 记录特定方法执行时的入参、执行时间、返参等内容
背景:JAVA项目,使用AOP对指定函数进行切面。能够记录特定方法执行时的入参、执行时间、返参结果等内容。 文章目录1、自定义注解类1.1 Target1.2 Retention2、Aspect切面工具2.1 JointPoint2.2 Pointcut2.3 切面中的相关注解3、同一个类里调用AOP4、其他…...

「史上最全的 TCG 规范解读」TCG 规范架构概述(下)
可信计算组织(Ttrusted Computing Group,TCG)是一个非盈利的工业标准组织,它的宗旨是加强不同计算机平台上计算环境的安全性。TCG 于 2003 年春成立,并采纳了由可信计算平台联盟(the Trusted Computing Platform Allia…...

GDScript 导出变量 (4.0)
概述 导出变量的功能在3.x版本中也是有的,但是4.0版本对其进行了语法上的改进。 导出变量在日常的游戏制作中提供节点的自定义参数化调节功能时非常有用,除此之外还用于自定义资源。 本文是(Bilibili巽星石)在4.0官方文档《GDScr…...

JAVA知识点全面总结6:泛型反射和注解
六.JAVA知识点全面总结6泛型反射和注解 1.什么是泛型?可以用在哪里? 2.泛型擦除机制是什么?为什么擦除? 3.通配符是什么?作用是什么? 未更新 1.注解是什么?有什么用? 2.注解的自定义和实…...

地统计学新手必看:如何用Arcgis的探索性分析发现数据隐藏规律?
地统计学入门实战:用ArcGIS探索性分析揭开数据的神秘面纱 第一次接触地统计学时,我盯着屏幕上密密麻麻的点数据完全不知所措。直到导师扔给我一句话:"数据会说话,关键看你用什么工具去倾听。"这句话彻底改变了我处理空间…...

Godot-MCP:重构游戏开发效率的AI协作框架解决方案
Godot-MCP:重构游戏开发效率的AI协作框架解决方案 【免费下载链接】Godot-MCP An MCP for Godot that lets you create and edit games in the Godot game engine with tools like Claude 项目地址: https://gitcode.com/gh_mirrors/god/Godot-MCP 传统游戏开…...

Minecraft世界管理终极指南:如何用MCA Selector快速清理和优化你的存档 [特殊字符]
Minecraft世界管理终极指南:如何用MCA Selector快速清理和优化你的存档 🎮 【免费下载链接】mcaselector A tool to select chunks from Minecraft worlds for deletion or export. 项目地址: https://gitcode.com/gh_mirrors/mc/mcaselector MCA…...

从防御者视角复盘:如何用Burp Suite和代码审计,在Pikachu靶场中挖掘并修复DOM-XSS漏洞
防御视角实战:基于Burp Suite与代码审计的DOM-XSS漏洞挖掘与修复指南 在当今Web应用安全领域,DOM型XSS(跨站脚本)漏洞因其独特的客户端特性,往往成为传统安全防护体系的盲区。与传统的反射型或存储型XSS不同࿰…...

GCN的‘死穴’与进化:从ST-GCN的耦合聚集缺陷,聊聊图神经网络下一步怎么走
GCN的耦合聚集困境与解耦进化路径:从ST-GCN缺陷到下一代图神经网络设计 当我们在计算机视觉领域习惯了CNN的强大性能后,转向图神经网络(GNN)时总会感到一丝"水土不服"。这种不适感的根源,很大程度上来自于图卷积(GCN)中那个看似合理…...

别再手动对齐轨迹了!用evo的-a和-s参数,5分钟搞定SLAM轨迹评估与可视化
别再手动对齐轨迹了!用evo的-a和-s参数,5分钟搞定SLAM轨迹评估与可视化 刚接触SLAM或视觉里程计的朋友们,是否曾被这样的场景困扰:明明算法输出的轨迹形状与真实轨迹相似,但两条曲线在坐标系中错位明显,根本…...
从‘一个向量’到‘三个向量’:为什么Transformer的Attention非得用Q、K、V?聊聊设计背后的权衡
从‘一个向量’到‘三个向量’:Transformer注意力机制中Q、K、V的设计哲学 在深度学习领域,Transformer架构彻底改变了自然语言处理的游戏规则。而其中最具革命性的设计,莫过于那个看似简单却暗藏玄机的注意力机制——特别是它独特的Q&#x…...

Sunshine游戏串流终极指南:从零开始打造你的个人游戏云
Sunshine游戏串流终极指南:从零开始打造你的个人游戏云 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 想要在任何设备上畅玩PC游戏,却苦于复杂的串流设置&…...
)
告别移植恐惧:用LVGL官方Porting模板快速适配你的STM32屏幕(以NT35510/GT9147为例)
告别移植恐惧:用LVGL官方Porting模板快速适配你的STM32屏幕 第一次接触LVGL时,面对庞大的源码库和复杂的移植文档,相信不少开发者都会感到无从下手。作为一个从零开始踩过无数坑的嵌入式开发者,我想分享一个被大多数人忽略的高效方…...

别再只盯着AUC了!临床预测模型评估新宠NRI和IDI,手把手教你用R语言实战解读
临床预测模型评估进阶:NRI与IDI的实战解读与R语言实现 在临床预测模型的研究中,我们常常陷入一个思维定式——将AUC(曲线下面积)视为评估模型性能的黄金标准。然而,当两个模型的AUC差异仅为0.02或0.03时,我们真的能自信地说新模型…...