如何在启用Secure Boot的Ubuntu 22.04电脑中安装使用VirtualBox 6.1
我使用的是华为Matebook X Pro笔记本电脑,默认开启了UEFI安全引导(UEFI Secure Boot),安装了Windows和Ubuntu双操作系统,平时基本上都是使用Ubuntu 22.04(Linux Mint 21.3),使用上也没有碰到什么问题,最近因为要使用虚拟机,发现在Windows系统中可以正常使用Virtualbox,但无法在Ubuntu中使用VirtualBox软件,启动虚拟机就报错,错误跟Secure Boot相关,查询了一下资料,找到了解决办法。
UEFI安全引导(UEFI Secure Boot)是PC制造商开发的一种安全标准,旨在帮助保护计算机免受恶意软件的攻击。它限制系统只能使用注册到系统固件中的模块进行引导。这意味着在引导过程中运行的所有软件和驱动程序都需要注册和验证。虽然可以通过禁用UEFI Secure Boot来解决Virtualbox的启动问题,但是我也想尝试启用Secure Boot的情况下安装使用Virtualbox;如果我们要进行安全引导,解决办法是对VirtualBox模块进行签名。这包括生成一个密钥对,将密钥注册到系统的固件中,并对VirtualBox模块进行签名。根据查询网络资料,执行这个操作一般需要三个步骤:
1、生成密钥对
要生成密钥对,请使用openssl命令,如下所示:
openssl req -new -x509 -newkey rsa:2048 -keyout MOK.priv -outform DER -out MOK.der -nodes -days 36500 -subj "/此命令生成一个新的RSA密钥对(MOK.priv和MOK.der)。“-days 36500”选项将密钥设置为100年后过期,“-subj”选项为密钥设置描述性通用名称。
2、注册密钥
要在系统固件中注册密钥,请按如下方式使用mokutil命令:
sudo mokutil --import MOK.der此命令将密钥导入机器所有者密钥(MOK)数据库,该数据库是系统信任的密钥列表。
3、对VirtualBox模块进行签名
要对VirtualBox模块进行签名,请使用以下命令:
这些命令使用您的密钥对VirtualBox内核模块(vboxdrv、vboxnetflt和vboxnetadp)进行签名。sudo /usr/src/linux-headers-$(uname -r)/scripts/sign-file sha256 ./MOK.priv ./MOK.der $(modinfo -n vboxdrv)sudo /usr/src/linux-headers-$(uname -r)/scripts/sign-file sha256 ./MOK.priv ./MOK.der $(modinfo -n vboxnetflt)sudo /usr/src/linux-headers-$(uname -r)/scripts/sign-file sha256 ./MOK.priv ./MOK.der $(modinfo -n vboxnetadp)
但是在实际的Ubuntu 22.04操作系统中已经为我们生成了RSA密钥对(MOK.priv和MOK.der),位于Ubuntu操作系统的/var/lib/shim-signed/mok目录中,我们需要做的就是第二步注册秘钥,进入上述目录执行命令:
sudo mokutil --import MOK.der执行命令后,按照提示要求设定注册秘钥的密码,然后通过sudo reboot重启动电脑,重启过程中华为的笔记本电脑就提示设定UEFI Secure Boot,按照提示要求选择第一项,输入刚才设定的密码就在BIOS中注册成功了。进入操作系统后通过执行以下命令来检查注册情况:
sudo mokutil --test-key /var/lib/shim-signed/mok/MOK.der 2如果提示以下信息,表示已经注册成功:
/var/lib/shim-signed/mok/MOK.der is already enrolled
最后执行配置程序,也就替代是前面所述的第三步的内容,命令为:
sudo /sbin/vboxconfig如果,提示如下信息:
vboxdrv.sh: Stopping VirtualBox services.
vboxdrv.sh: Starting VirtualBox services.
vboxdrv.sh: Building VirtualBox kernel modules.
vboxdrv.sh: Signing VirtualBox kernel modules.
表示配置成功,就可以启动并正常使用VirtualBox 6.1软件了。
相关文章:

如何在启用Secure Boot的Ubuntu 22.04电脑中安装使用VirtualBox 6.1
我使用的是华为Matebook X Pro笔记本电脑,默认开启了UEFI安全引导(UEFI Secure Boot),安装了Windows和Ubuntu双操作系统,平时基本上都是使用Ubuntu 22.04(Linux Mint 21.3),使用上也…...

基于B/S+MySQL+Tomcat开发的旅游信息管理系统
基于B/SMySQLTomcat开发的旅游信息管理系统 项目介绍💁🏻 塞北村镇旅游网站设计主要用于实现旅游景点信息管理,基本功能包括:主界面模块设计,用户注册模块,旅游景点模块,酒店预订模块࿰…...

mac m3安装nvm安装说明;mac安装xbrew
安装说明说明: 1.安装brew /bin/zsh -c "$(curl -fsSL https://gitee.com/cunkai/HomebrewCN/raw/master/Homebrew.sh)"2.安装nvm brew install nvm3.创建.nvm目录 mkdir ~/.nvm4.编辑 ~/.zshrc 配置文件 vi ~/.zshrc5.在 ~/.zshrc 配置文件内添加内…...
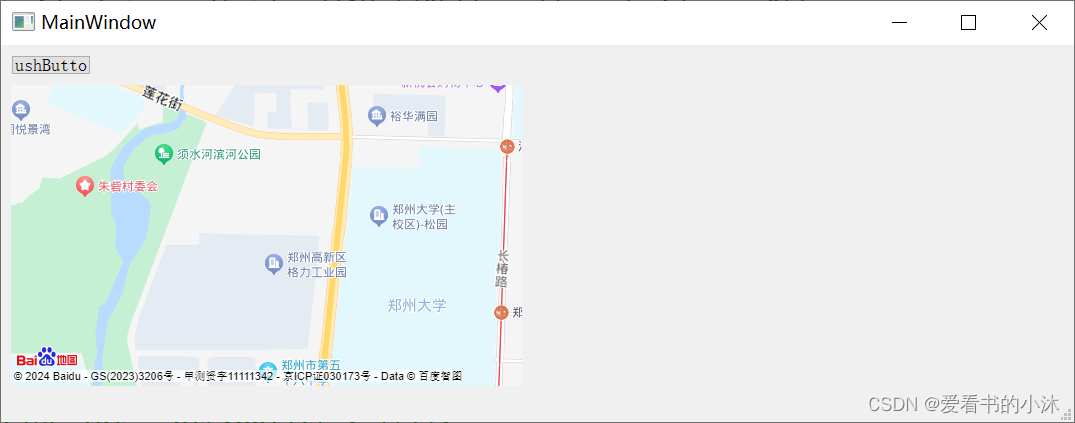
【小沐学QT】QT学习之Web控件的使用
文章目录 1、简介1.1 Qt简介1.2 Qt下载和安装1.3 Qt快捷键1.4 Qt帮助 2、QtWeb控件2.1 测试代码1(QApplication)2.2 测试代码2(QApplicationQWidget)2.3 测试代码3(QApplicationQMainWindow)2.4 测试代码4&…...

word embedding
介绍: ASCII可以编码为计算机可以识别的数据,为什么还需要embedding? 计算机只是对“字母”进行ASCII编码,并没有对词汇的“Word”编码。词汇应该是咱们处理自然语言的最基本的元素,而不是字母。那么世界上有千千万万的Word&am…...

原码,反码,补码
原码 什么是原码 原码:十进制数据的二进制表现形式,最左边是符号位,0为正,1为负 最大值 0 1 1 1 1 1 1 1 > 127 最小值 1 1 1 1 1 1 1 1 > -127 原码的弊端 利用原码对正数进行计算是不会有问题的 但是如果是负数计算…...

科技赋能,MTW400A为农村饮水安全打通“最后一公里”
日前,山东省政府纵深推进国家省级水网先导区建设,持续深化“水网”行动,着力构筑水安全保障网、水民生服务网、水生态保护网,建设水美乡村示范带、内河航运示范带、文旅融合示范带、绿色发展示范带,推动形成“三网四带…...
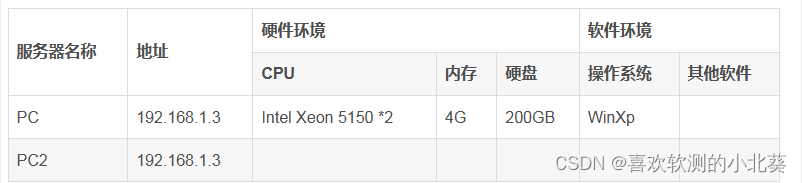
测试计划、测试方案、测试策略、测试用例的区别
一 测试计划 测试计划是指描述了要进行的测试活动的范围、方法、资源和进度的文档。它主要包括测试项、被测特性、各阶段的测试任务、时间进度安排,谁执行任务和风险控制等,可以包括测试策略。 二 测试方案 测试方案是指描述需要测试的特性、测试的方…...
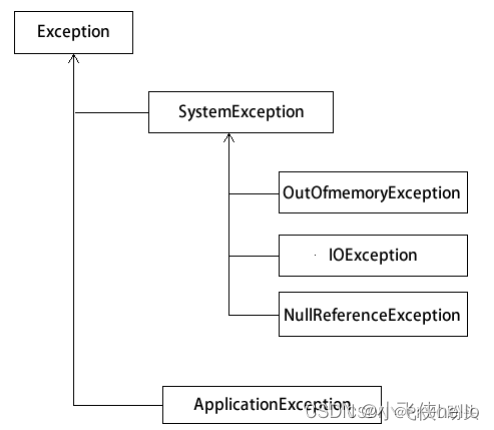
c# 异常处理
异常类 .NET Framework 类库中的所有异常都派生于 Exception 类,异常包括系统异常和应用异常。 默认所有系统异常派生于 System.SystemException,所有的应用程序异常派生于 System.ApplicationException。 系统异常一般不可预测,比如内存堆…...
 Object Pascal 学习笔记---第6章第3节(传递字符串作为参数))
(delphi11最新学习资料) Object Pascal 学习笔记---第6章第3节(传递字符串作为参数)
6.3 字符串数据类型 Object Pascal 中的字符串数据类型比简单的字符数组复杂得多,其功能远远超出了大多数编程语言为类似数据类型提供的功能。在本节中,我将介绍这种数据类型背后的关键概念;在接下来的章节中,我们将更详细地探…...
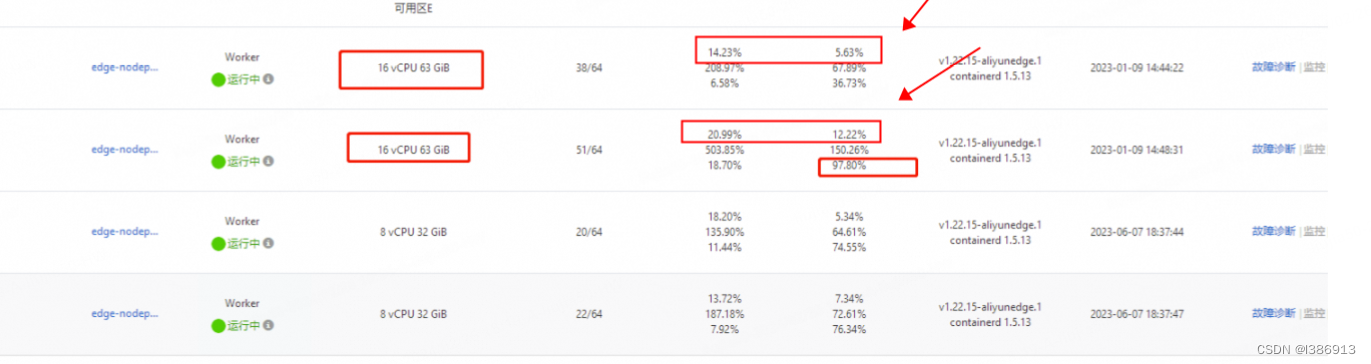
k8s节点负载使用情况分析命令kubectl describe node [node-name]
1.到任意安装了kubectl节点命令的节点上执行kubectl describe node [node-name] 上面的Requests最小分配 Limits最大分配是所有pod之和,最小分配之和不能超过服务器实际参数,否则新的pod会因为资源不够起不来,最大分配是预设之和࿰…...
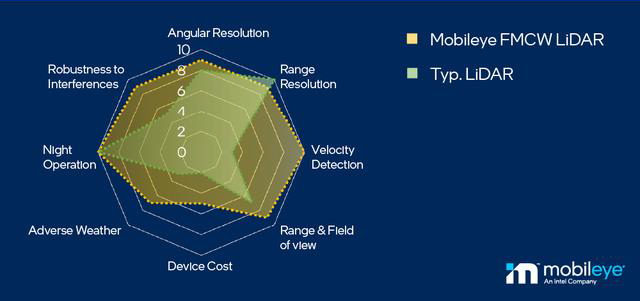
自动驾驶加速落地,激光雷达放量可期(上)
1 激光雷达应用广泛,汽车有望成最大催化 激光雷达(LiDAR)是一种主动遥感技术,通过测定传感器发出的激光在传感器与目标物体之间的传播距离,来分析目标地物表面的反射能量大小、反射波谱的幅度、频率和相位等信息&#…...

变量的间接引用
场景: 如果第一个变量的值是第二个变量的名字,我们能够从第一个变量中取得第二个变量的值吗?例如,如果aztj且ztjz,那么我们能够通过引用变量a来获得值z吗?答案是可以,它被称为间接引用…...
)
学习JAVA的第六天(基础)
目录 集合 集合和数组的对比 ArrayList成员方法 ArrayList成员方法代码展示 练习 集合的遍历01之字符串 集合的遍历02之数字 集合的遍历03之学生对象 集合 集合和数组的对比 从长度维度来看 数组长度固定 集合长度可变从存储类型维度来看 数组可以存放基本数据类型和…...

LeetCode 2673.使二叉树所有路径值相等的最小代价:自顶向下的DFS 或 自底向上的递推
【LetMeFly】2673.使二叉树所有路径值相等的最小代价:自顶向下的DFS 或 自底向上的递推 力扣题目链接:https://leetcode.cn/problems/make-costs-of-paths-equal-in-a-binary-tree/ 给你一个整数 n 表示一棵 满二叉树 里面节点的数目,节点编…...
9、电源管理入门之CPU Idle
目录 1. CPU Idle有什么用? 2. CPU Idle整体框架 3. Idle状态判断 3. cpuidle core 4. 注册初始化 4.1 cpuidle governor注册 4.2 cpuidle driver注册 4.3 cpuidle device注册 5. cpuidle触发流程 关于Linux的很多知识其实网上的资料非常的多,但是也有些问题: 有时…...

uniapp的扩展组件uni-popup 弹出层自动打开
我的需求是在页面加载完之后自动打开弹窗,自动打开只能写在onReady 或 mounted 生命周期内,这是这个组件的规定: 如果想在页面渲染完毕后就打开 uni-popup ,请在 onReady 或 mounted 生命周期内调用,确保组件渲染完毕…...

二、mysql常用函数
目录 一、Mysql数值型函数 二、Mysql字符串函数 三、Mysql日期和时间函数 四、Mysql聚合函数 五、Mysql流程控制函数 六、其他函数 一、Mysql数值型函数 函数名称 作用 abc 求绝对值 sqrt 求二次方根 mod 求余数 ceil 和 ceiling 功能一样,都是返回不小…...

【Redis | 第一篇】快速了解Redis
文章目录 1.快速了解Redis1.1简介1.2与其他key-value存储的不同处1.3Redis安装——Windows环境1.3.1下载redis1.3.2启动redis1.3.3进入redis客户端1.3.4修改配置 1.4Redis安装——Linux环境1.4.1安装命令1.4.2启动redis1.4.3进入redis客户端 1.5配置修改1.6小结 1.快速了解Redi…...
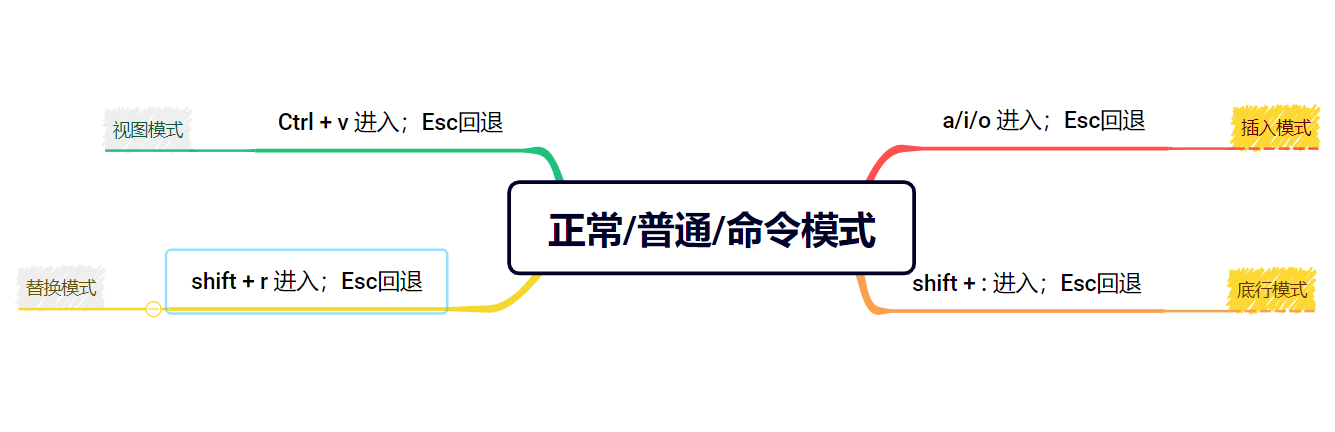
Vim 模式切换 | 命令集
Vim 模式切换 | 命令集 vim 主要模式及切换一、正常/普通/命令模式1 光标相关操作命令集1.1 光标移动1.2 文字删除1.3 粘贴和复制1.4 撤销1.5 字符更改 二、插入模式2.1 插入模式和命令行模式相互切换 三、末行模式2.1 末行模式和命令行模式相互切换2.2 末行模式相关命令集 四、…...

别再死记硬背公式了!用Python+ADS仿真,5分钟搞定L型阻抗匹配电路设计
用PythonADS自动化设计L型阻抗匹配电路:从理论到一键生成 在射频工程实践中,阻抗匹配是每个工程师必须掌握的核心技能。传统方法依赖手工计算和Smith圆图操作,不仅耗时费力,还容易出错。本文将展示如何结合Python脚本和Keysight …...

F3D三维查看器:技术专家视角下的高性能3D渲染解决方案
F3D三维查看器:技术专家视角下的高性能3D渲染解决方案 【免费下载链接】f3d Fast and minimalist 3D viewer. 项目地址: https://gitcode.com/GitHub_Trending/f3/f3d F3D是一个专注于性能和简洁性的开源三维查看器,为开发者和技术用户提供极致的…...

手把手复现AlexNet:用PyTorch 2.0+在单GPU上跑通2012年的‘深度’革命
手把手复现AlexNet:用PyTorch 2.0在单GPU上跑通2012年的‘深度’革命 2012年,AlexNet横空出世,以15.3%的Top-5错误率横扫ImageNet竞赛,将传统方法甩开近10个百分点。这个8层神经网络不仅证明了深度学习的潜力,更开创了…...

OV5640图像拖影?帧率不稳?可能是你的PCLK没配对!附调试心得
OV5640图像拖影与帧率不稳的PCLK调试实战指南 当你在嵌入式项目中集成OV5640摄像头模组时,是否遇到过这样的场景:硬件连接一切正常,驱动程序也能跑通,但实际采集到的图像却出现拖影、撕裂或帧率跳变?作为一款广泛应用…...

网络拓扑发现实战:从LLDP数据采集到D3.js可视化前端全链路解析
网络拓扑发现实战:从LLDP数据采集到D3.js可视化全链路解析 现代网络架构正变得越来越复杂,从传统的三层架构到如今的云原生网络,设备之间的连接关系呈现出动态化、多样化的特征。对于网络运维团队而言,如何快速准确地掌握全网拓扑…...

终极指南:用Python快速构建完整免费的金融数据自动化分析系统
终极指南:用Python快速构建完整免费的金融数据自动化分析系统 【免费下载链接】akshare AKShare is an elegant and simple financial data interface library for Python, built for human beings! 开源财经数据接口库 项目地址: https://gitcode.com/gh_mirrors…...

自制车模的福音:微型车模设计方案厂家开源了
简 介: 智能汽车竞赛引发关于厂商车模的争议:成品车模是否影响公平性?龙邱公司表示将开源车模设计文件,供参赛队伍参考。讨论焦点包括规则透明度、车模定位("鲶鱼效应"还是破坏公平)、评分标准优…...

告别复杂环境!用C# Winform + OpenCVSharp4 5分钟搞定一个桌面人脸识别小工具
5分钟极速开发:用C# Winform OpenCVSharp4打造桌面人脸识别工具 想象一下这样的场景:周一晨会上,产品经理突然提出需要一个能在Windows电脑上运行的人脸识别演示工具,要求周三前完成原型演示。作为C#开发者的你,如何在…...

告别标定噩梦:手把手教你用OpenCV搞定Jetson Nano双目摄像头标定,并适配ORB_SLAM2
双目视觉标定实战:从Jetson Nano到ORB_SLAM2的完整指南 在计算机视觉领域,双目摄像头的标定是构建三维感知系统的关键第一步。许多开发者在使用Jetson Nano搭配双目摄像头运行ORB_SLAM2时,往往会在标定环节耗费大量时间却收效甚微。本文将彻底…...

别只重装Qt了!解决QtCreator无法调试,九成问题出在Windows SDK和CDB版本匹配上
别只重装Qt了!解决QtCreator无法调试的Windows SDK与CDB版本匹配指南 当你按下F5键期待调试器启动,却只看到QtCreator无情地跳过所有断点时,重装Qt可能是最无效的解决方案。真正的问题往往隐藏在Windows SDK和CDB调试器的版本匹配中——这个…...