自动驾驶加速落地,激光雷达放量可期(上)
1 激光雷达应用广泛,汽车有望成最大催化
激光雷达(LiDAR)是一种主动遥感技术,通过测定传感器发出的激光在传感器与目标物体之间的传播距离,来分析目标地物表面的反射能量大小、反射波谱的幅度、频率和相位等信息,进而实现对目标物体的精确定位、识别以及一些特性的检测,主要可以用于自动驾驶、智慧城市等领域。
激光雷达的工作原理是利用激光发射器发射激光束,然后通过接收器接收从目标物体反射回来的激光信号,从而测量出目标物体的距离、方向、高度等信息。激光雷达可以用于自动驾驶、机器人、测绘等领域,具有高精度、高分辨率、高可靠性等优点。
图表1:激光雷达工作原理
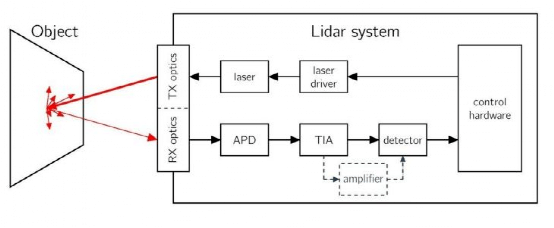
激光雷达按照测距方法可以分为飞行时间(Time of Flight,ToF)测距法、基于相干探测的FMCW 测距法、以及三角测距法等,其中ToF 与FMCW 能够实现室外阳光下较远的测程(100-250m),是车载激光雷达的优选方案。ToF 是目前市场车载中长距激光雷达的主流方案,未来随着 FMCW 激光雷达整机和上游产业链的成熟,ToF 和 FMCW 激光雷达将在市场上并存。
图表2:激光雷达按测距方法分类

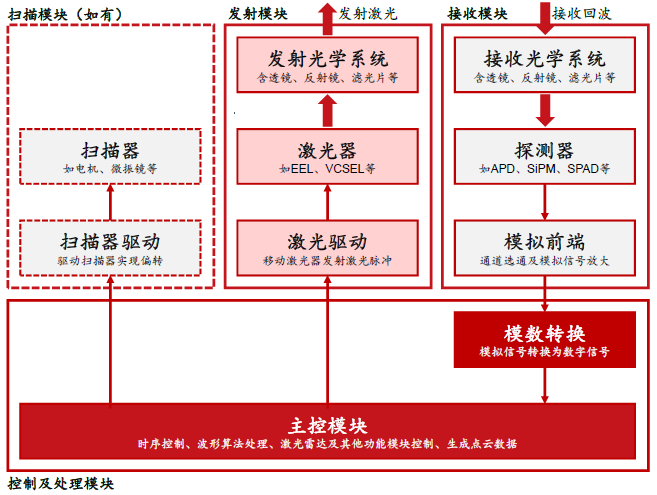
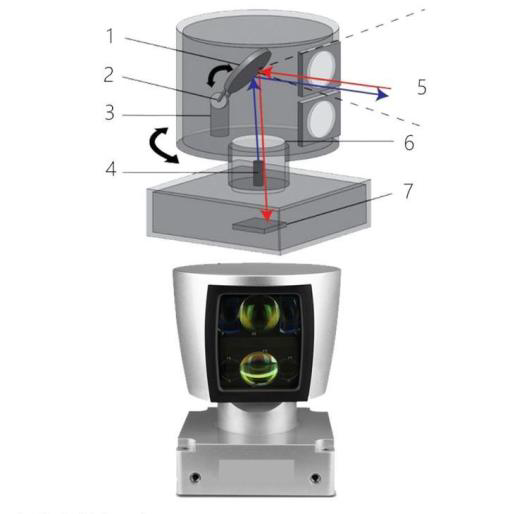
图表3:TOF 激光雷达结构
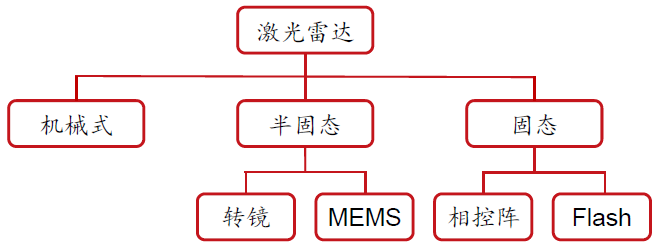
根据技术架构的差异,激光雷达主要分为机械式激光雷达、半固态式激光雷达以及固态式激光雷达。
图表4:激光雷达按技术架构分类
激光雷达自诞生以来,紧跟底层器件的前沿发展,不断引入新的技术架构,从激光器发明之初的单点激光雷达到后来的单线扫描激光雷达,以及在无人驾驶技术中获得广泛认可的多线扫描激光雷达,再到技术方案不断创新的固态式激光雷达、FMCW 激光雷达,技术路径持续创新。
图表5:激光雷达分类
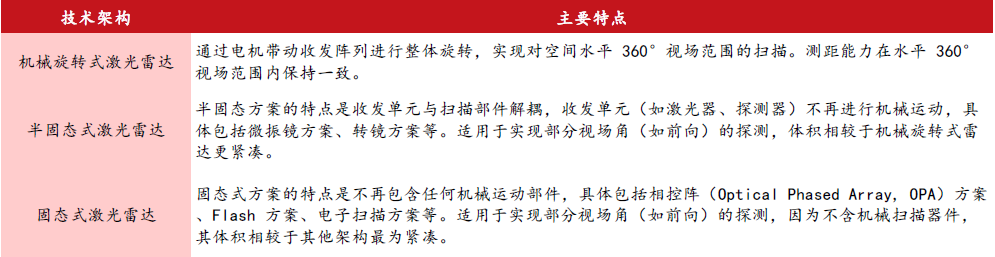
图表6:激光雷达方案技术特点
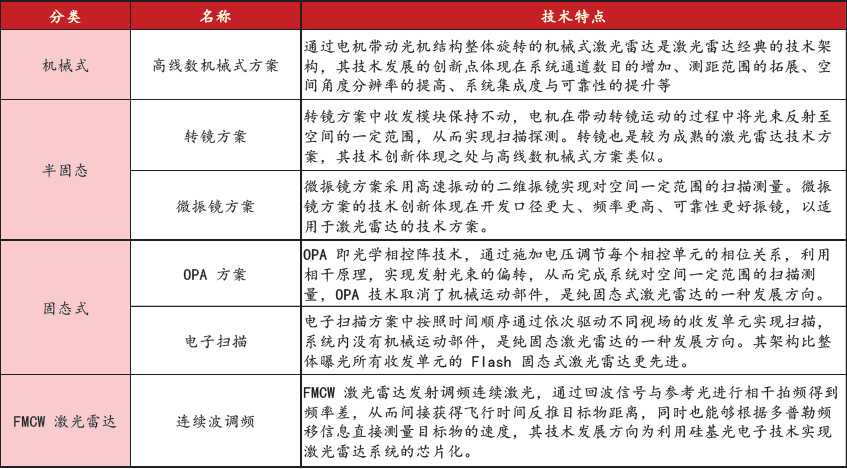
1.1 机械式激光雷达
机械旋转式激光雷达通过电机带动收发阵列进行整体旋转,实现对空间水平360°视场范围的扫描。机械旋转式激光雷达的优点是扫描速度快、精度高,适用于远距离探测和高速运动目标的跟踪。但是其结构相对复杂,维护成本高,且需要精确的对准和校准,造成其短期可能无法在乘用车上大批量的使用。
图表7:机械式激光雷达工作原理
1.2 固态激光雷达
固态激光雷达使用固态激光器,可以输出高质量而稳定的激光束,能够实时捕捉和处理光点数据,有效提高了雷达精度;同时固态激光雷达没有机械运动部件,相比于旋转激光雷达,其寿命更长且故障率更低。
然而,固态激光雷达也有一些缺点:探测距离相对较短:由于其工作原理的限制,固态激光雷达的探测距离一般较短,可能无法满足远距离探测的需求。固态激光雷达的视场角一般较小,可能无法覆盖较大的角度范围。
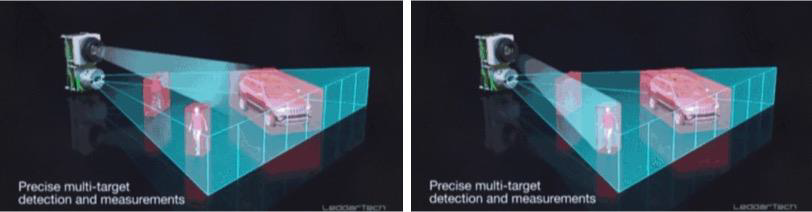
A. Flash 激光雷达:主要通过短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器完成对环境周围图像的绘制。其优点在于快速记录整个场景,体积小,缺点主要在于激光功率受限、探测距离较近。
图表8:Flash 激光雷达工作原理
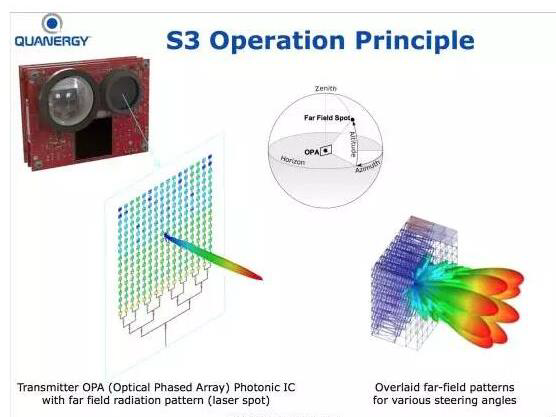
B.光学相控阵激光雷达:采用光学相控阵天线代替传统的机械扫描系统,可以实现高速度、高精度的三维成像。其利用多个小型激光器并列排列,通过控制每个激光器的发射时间和相位,实现激光束在空间上的合成,形成所需的扫描图案。相比传统的机械扫描激光雷达,光学相控阵激光雷达具有更高的扫描速度和更长的扫描距离。同时具有更高的精度和灵活性。
然而,光学相控阵激光雷达制造工艺较为复杂,成本较高,同时其性能也受到光源质量、光学元件质量和控制系统精度等因素的影响。
图表9:Quanergy 光学相控阵激光雷达工作原理
1.3 半固态激光雷达
半固态激光雷达具有一些显著的优点,例如半固态激光雷达利用多个光源组成阵列,实现对不同方向的快速扫描,因此具有较高的扫描速度;通过控制光源的阵列,可以实现对特定方向的光束进行精确合成,从而获得高精度的测量结果。半固态激光雷达由于没有机械运动部件,因此体积较小,可以较好的融入到车的外观中去,但是由于半固态激光雷达扫描的是非结构化数据,因此需要采用更为复杂的算法进行处理,增加了数据处理的难度和计算量。
A. MEMS 振镜激光雷达:采用MEMS 振镜作为激光光束扫描元件,反射镜以一定谐波频率振荡,由旋转的微振镜来反射激光器的光线,从而实现扫描,具有体积小、宏观结构简单、可靠性高、功耗低等优势,是目前激光雷达实现落地应用的较合适的技术路径。
B. 转镜方案:采用转镜作为激光光束扫描元件,工作原理是将激光束照射到转镜上,通过转镜的旋转来扫描目标物体,可以实现不同角度的扫描。具有高精度、高分辨率、可靠性高等优点。但是由于转镜方案的制造工艺较为复杂,因此成本相对较高。
1.4 FMCW 激光雷达
相比传统的基于飞行时间(ToF)的脉冲激光雷达,FMCW 激光雷达基于相干探测方法,通过发出连续的激光束,并控制激光束的频率随着时间变化,形成一定的调频曲线,可以响应目标运动引起的多普勒频移,提供目标的瞬时视向速度,FMCW激光雷达具有更高的精度和分辨率,同时也具有更强的抗干扰能力。
图表10:FMCW 激光雷达工作原理
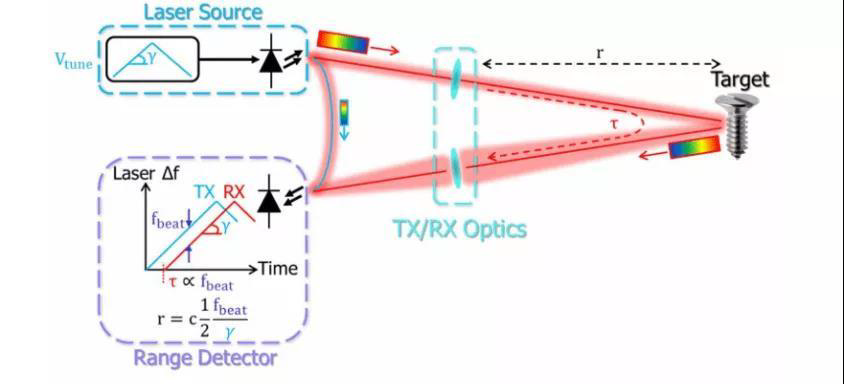
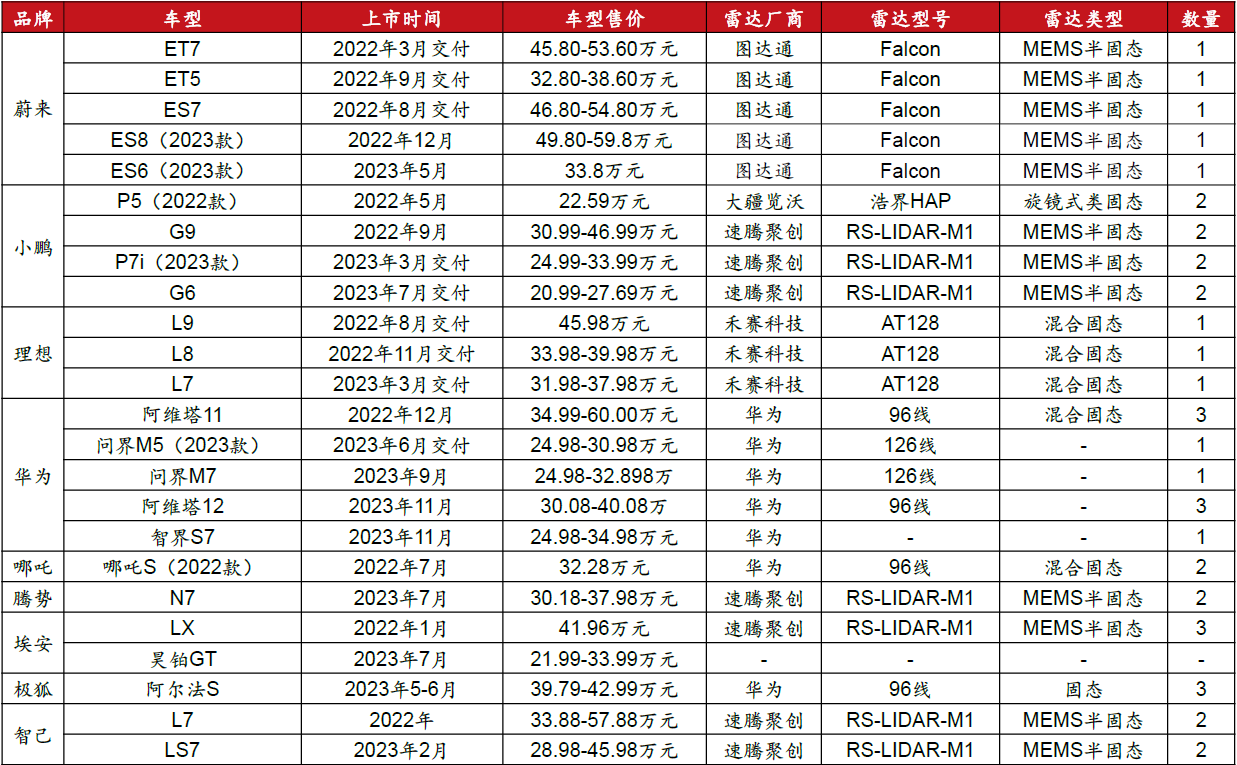
FMCW 激光雷达的接收和扫描中也需要用到硅光芯片,由于硅光芯片既能导电又能导光,因此它既具有光电探测器的功能,又具有调制解调的功能,从而使得整个系统集成化、小型化。由中国信息通信研究院技术与标准研究所编撰的《车载激光雷达技术与应用研究报告(2023 年)》统计,截止到2023 年第三季度,已有36家中国车企宣布使用激光雷达,预计国内将有高达106 款搭载激光雷达的车型上市,占全球同期预计发布搭载激光雷达新车型总数量近90%,中国车企在激光雷达领域将持续引领着行业的创新。
图表11:重点车型激光雷达搭载情况
2 海外巨头跟踪:洗牌加速,新技术持续落地
行业内主要的激光雷达公司包括美国的 Velodyne、Luminar、Aeva、Ouster,以色列的 Innoviz,德国的 Ibeo,以及国内的速腾聚创、禾赛科技、图达通、华为等。在行业发展早期国外公司为技术主导,但近几年国内激光雷达公司投入大量研发,逐步完成了技术的追赶甚至在一定范围内实现超越。
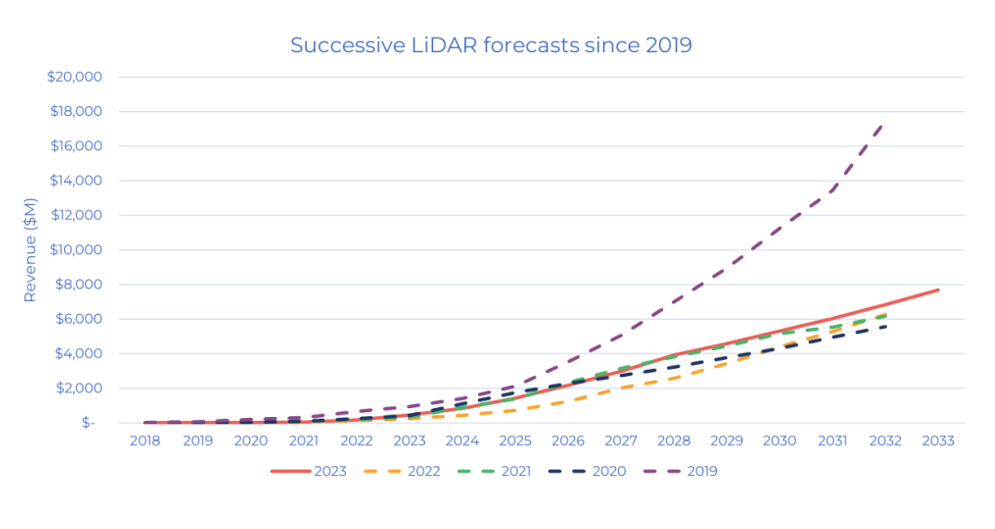
根据Yole Intelligence 发布的《2023 年全球车载激光雷达市场与技术报告》,调高了对乘用车和轻型商用车激光雷达市场的中长期预测:到2030 年,乘用车和轻型商用车激光雷达市场将到达53 亿美元,比去年预测的高出10 亿美元。
图表12:激光雷达全球市场空间预测
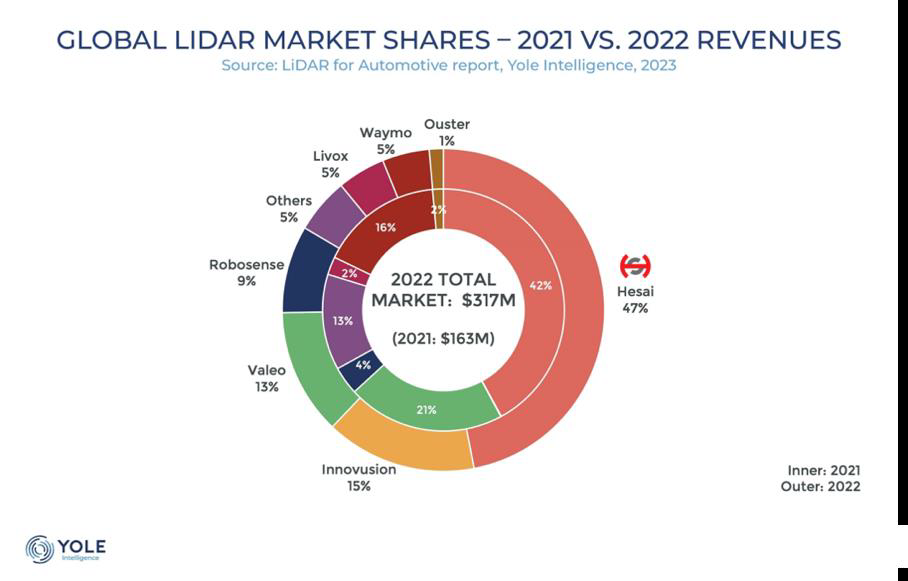
从全球激光雷达市场格局来看,2022 年,禾赛以近50%的市场份额连续两年稳居全球车载激光雷达总营收榜首,并且其市场份额从2021 年的42%进一步扩大至47%。图达通则依靠蔚来汽车的持续出货,以15%的市场份额夺得第二名,法雷奥、速腾聚创分别以13%、9%的市场份额位列第三、第四。
图表13:激光雷达全球竞争格局
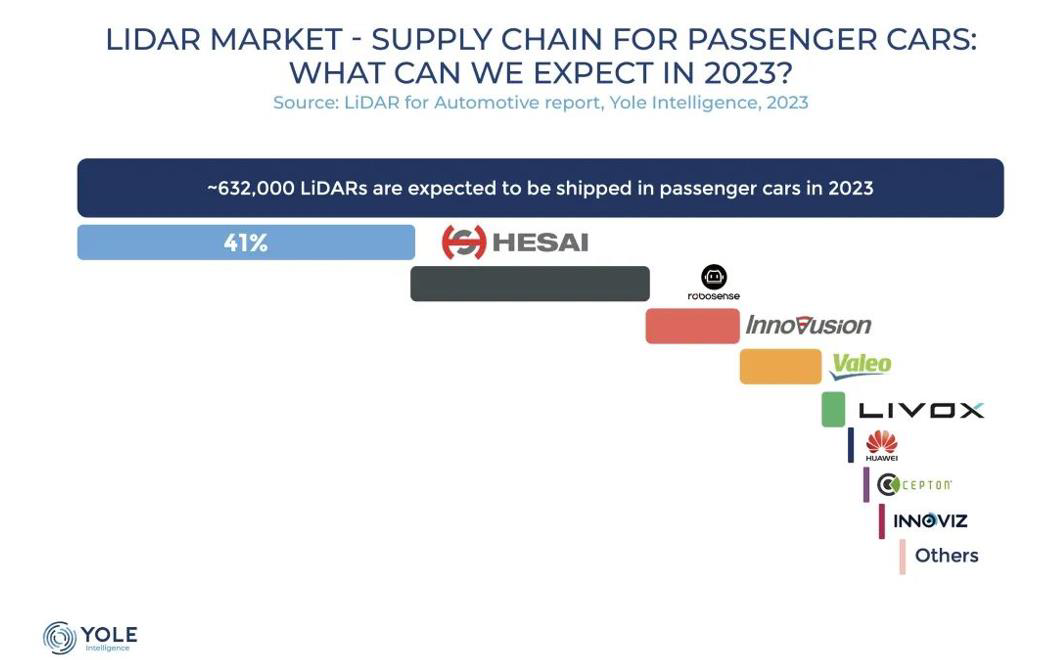
随着中国智能驾驶行业快速崛起,ADAS 功能量产规模进一步扩大,国内头部车企对激光雷达的需求猛增,Yole 预测2023 年全球车载激光雷达市占率前五的厂商中,前三名都会是中国企业,分别是禾赛、速腾聚创和图达通。剩下约20%的份额则由法雷奥、大疆览沃、华为、Cepton、Innoviz 等多家公司瓜分
图表14:激光雷达2023 年市场份额预测
2.1 Innoviz:与宝马深入合作,获大众40 亿美元订单
以色列激光雷达传感器研发商Innoviz 成立于2016 年,由来自以色列国防军情报部队精英技术部门的四位联合创始人创建。该公司专注于研发固态激光雷达(LiDAR)传感器,致力于为自动驾驶和高级驾驶辅助系统(ADAS)市场提供创新的解决方案。
Innoviz 的激光雷达传感器在市场上具有较高的竞争力,已被多家知名汽车制造商和自动驾驶技术公司选用。2017 年宣布与全球第三大代工厂 Jabil(捷普)合作,2018 年宣布与 Magna(麦格纳)合作宝马项目,并于为宝马2021 年推出的L3 量产车提供激光雷达。2022 年8 月以色列激光雷达公司Innoviz 宣布,将向大众汽车集团旗下的CARIAD 提供激光雷达硬件和配套软件,交易总价达40 亿美元,预计2025 年开始交付。
Innoviz 旗下共有三大产品线:1)InnovizOne:最远探测距离250 米,适用于L3-L5 级汽车;2)InnovizTwo:成本较InnovizOne 降低了70%以上,同时性能显著提升,主要针对L2+级市场,L3-L4 亦适用,将应用于大众等品牌;3)Innoviz360:性能、成本和耐用性都得到显著提升,最远探测距离300m,主要针对L4/5 级自动驾驶,计划2024 年量产。
2.2 Luminar:加速全球化工厂布局
Luminar 是一家美国激光雷达公司,由Austin Russell 在2012 年创立,专注于MEMS 混合固态激光雷达领域。该公司在1550nm 波长持续深耕,主要产品为Iris和Hydra。其中,Hydra 是上一代激光雷达产品,主要用于测试和开发;公司最新的车规级产品Iris 于2022 年量产,与沃尔沃达成供应协议,用于 2022 年上市的自动驾驶系统。Luminar 已经与多家汽车制造商合作,包括奔驰、沃尔沃、奥迪、丰田研究院、英特尔的 Mobileye、空客以及上汽集团 和 AV 运营商小马智行等重要客户。
图表17:美国激光雷达公司Luminar

Luminar 今年三月在投资者日活动推出了新版本的 Iris 传感器,公司称其具有300 米(984 英尺)的检测范围,Luminar 正在与梅赛德斯合作,将Iris Plus 激光雷达集成到其车辆中,预计将于2025 年开始量产。同时Luminar 计划在亚洲开设一家制造工厂以支持生产。墨西哥工厂也于今年第二季度开始上线,Luminar还与合同制造商 Fabrinet 一起扩建泰国的另一家工厂以生产光学组件。
2.3 Velodyne&Ouster:合并经营,竞争格局快速洗牌
美国Velodyne 是一家位于加州硅谷的技术公司,以激光雷达传感器技术为核心,提供自动驾驶解决方案。公司由David Hall 于1983 年创立,早期以音响业务起家,后来逐渐将业务拓展至激光雷达领域。2021 年全年,Velodyne 出货量达到了15000 多个,其中有2400 多个是固态传感器,大部分为机械激光雷达。根据2022 年Velodyne 官网的合并公告,Ouster 与Velodyne 完成“对等合并”,新公司继续使用Ouster 的名字,合并后的公司将拥有850 多家现有客户、丰富的专利组合。但是后续随着图达通、法雷奥、禾赛科技、速腾、华为等厂商的快速崛起,曾占据全球激光雷达市场80%以上份额的Velodyne 市占率缩水。
2.4 Aeva:FMCW 技术领先者,产品有望后年投产
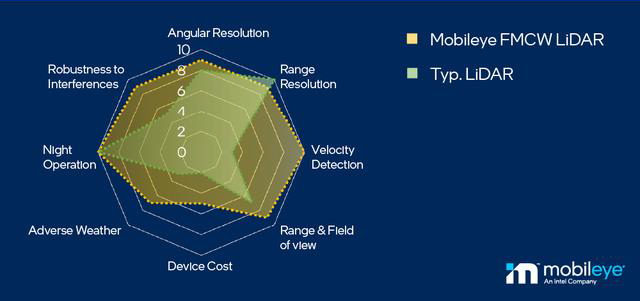
Aeva 的激光雷达传感器采用先进的调频连续波(FMCW)技术,可以实现高精度的距离和速度测量,以及高分辨率的点云成像。这使得传感器能够准确检测和识别车辆周围的所有物体,包括行人、车辆和障碍物,最远可以探测到500 米外的物体。2021 年1 月,Avea 与日本电装宣布达成合作协议,双方将共同推进FMCW(调频连续波)激光雷达的量产,目标是满足大众市场的需求。Aeva 联合创始人兼首席执行官表示,公司已拿到全球前十车企的定点,量产车型预计在2025 年投产。
图表24:Mobileye FMCW 激光雷达性能表现
相关文章:
自动驾驶加速落地,激光雷达放量可期(上)
1 激光雷达应用广泛,汽车有望成最大催化 激光雷达(LiDAR)是一种主动遥感技术,通过测定传感器发出的激光在传感器与目标物体之间的传播距离,来分析目标地物表面的反射能量大小、反射波谱的幅度、频率和相位等信息&#…...

变量的间接引用
场景: 如果第一个变量的值是第二个变量的名字,我们能够从第一个变量中取得第二个变量的值吗?例如,如果aztj且ztjz,那么我们能够通过引用变量a来获得值z吗?答案是可以,它被称为间接引用…...
)
学习JAVA的第六天(基础)
目录 集合 集合和数组的对比 ArrayList成员方法 ArrayList成员方法代码展示 练习 集合的遍历01之字符串 集合的遍历02之数字 集合的遍历03之学生对象 集合 集合和数组的对比 从长度维度来看 数组长度固定 集合长度可变从存储类型维度来看 数组可以存放基本数据类型和…...

LeetCode 2673.使二叉树所有路径值相等的最小代价:自顶向下的DFS 或 自底向上的递推
【LetMeFly】2673.使二叉树所有路径值相等的最小代价:自顶向下的DFS 或 自底向上的递推 力扣题目链接:https://leetcode.cn/problems/make-costs-of-paths-equal-in-a-binary-tree/ 给你一个整数 n 表示一棵 满二叉树 里面节点的数目,节点编…...
9、电源管理入门之CPU Idle
目录 1. CPU Idle有什么用? 2. CPU Idle整体框架 3. Idle状态判断 3. cpuidle core 4. 注册初始化 4.1 cpuidle governor注册 4.2 cpuidle driver注册 4.3 cpuidle device注册 5. cpuidle触发流程 关于Linux的很多知识其实网上的资料非常的多,但是也有些问题: 有时…...

uniapp的扩展组件uni-popup 弹出层自动打开
我的需求是在页面加载完之后自动打开弹窗,自动打开只能写在onReady 或 mounted 生命周期内,这是这个组件的规定: 如果想在页面渲染完毕后就打开 uni-popup ,请在 onReady 或 mounted 生命周期内调用,确保组件渲染完毕…...

二、mysql常用函数
目录 一、Mysql数值型函数 二、Mysql字符串函数 三、Mysql日期和时间函数 四、Mysql聚合函数 五、Mysql流程控制函数 六、其他函数 一、Mysql数值型函数 函数名称 作用 abc 求绝对值 sqrt 求二次方根 mod 求余数 ceil 和 ceiling 功能一样,都是返回不小…...

【Redis | 第一篇】快速了解Redis
文章目录 1.快速了解Redis1.1简介1.2与其他key-value存储的不同处1.3Redis安装——Windows环境1.3.1下载redis1.3.2启动redis1.3.3进入redis客户端1.3.4修改配置 1.4Redis安装——Linux环境1.4.1安装命令1.4.2启动redis1.4.3进入redis客户端 1.5配置修改1.6小结 1.快速了解Redi…...
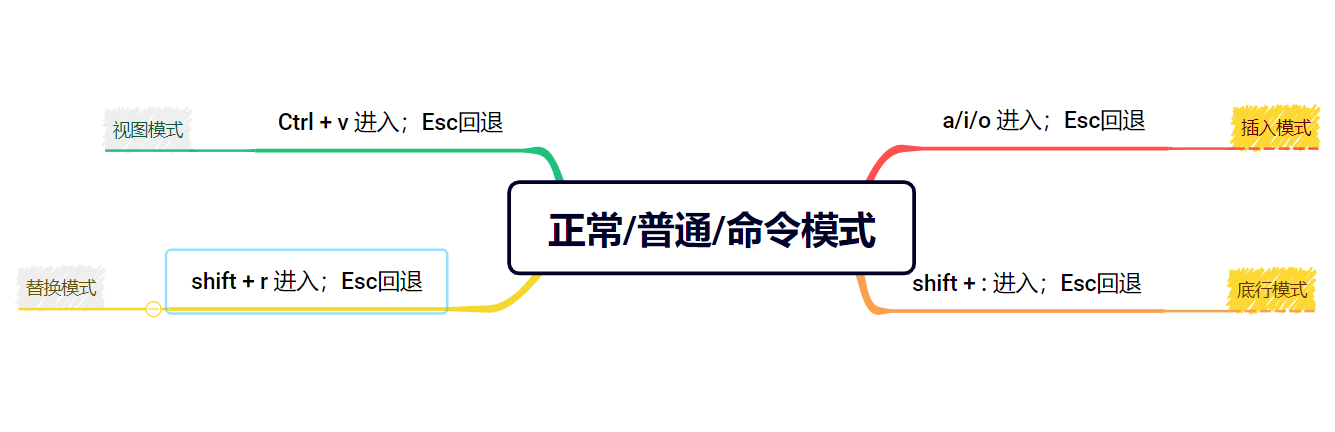
Vim 模式切换 | 命令集
Vim 模式切换 | 命令集 vim 主要模式及切换一、正常/普通/命令模式1 光标相关操作命令集1.1 光标移动1.2 文字删除1.3 粘贴和复制1.4 撤销1.5 字符更改 二、插入模式2.1 插入模式和命令行模式相互切换 三、末行模式2.1 末行模式和命令行模式相互切换2.2 末行模式相关命令集 四、…...

广和通5G智能模组SC171支持Android、Linux和Windows系统,拓宽智能物联网应用
世界移动通信大会2024期间,广和通宣布:5G智能模组SC171除支持Android操作系统外,还兼容Linux和Windows系统,帮助更多智能终端客户快速迭代产品,拓宽智能化应用覆盖范围。 广和通SC171系列基于高通QCM6490物联网解决方案…...
【51单片机】红外遥控红外遥控电机调速(江科大)
1.红外遥控简介 红外遥控是利用红外光进行通信的设备,由红外LED将调制后的信号发出,由专用的红外接收头进行解调输出 通信方式:单工,异步 红外LED波长:940nm 通信协议标准:NEC标准 2.硬件电路 红外发送部分 IN高电平时,LED不亮,IN低电平时&…...
kubesphere jenkins 流水线 未运行(解决方案)
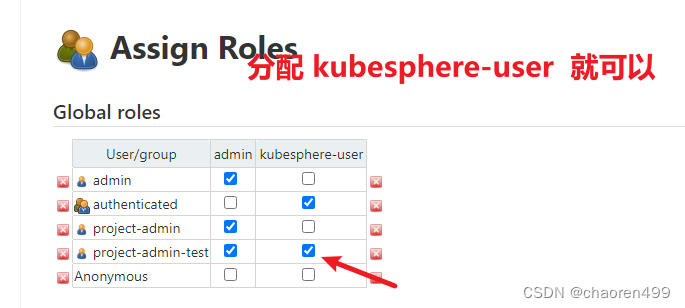
场景: 在kubesphere 中运行 流水线 devops 结果,显示未运行 但是用 admin 账户是可以运行成功的。 问题解决 1- 查日志: 然后 Caused: org.acegisecurity.userdetails.UsernameNotFoundException: org.springframework.security.core.…...

如何保护服务器的安全
互联网的迅速发展,让很多企业都很重视网络技术的使用,但是网络的传播速度比较快,同时容易造成数据、隐私方面的泄露现在每个企业基本有自己的服务器。有几点需要注意,可以参考: 1.基础密码安全 最基本的安全就是密码安…...

Python使用HDL 模拟器实现 FPGA 板卡的仿真验证
Python 结合 HDL 模拟器实现 FPGA 板卡的仿真验证,您可以借助一些开源工具和库来实现这一目的。下面我将为您介绍一种常用的方法,使用 Python 结合 Verilog 模拟器和 FPGA 开发工具进行仿真验证。 ### 步骤概述 1. **编写 Verilog 设计**:首…...

vue中 input disable后无法触发点击事件
问题:input标签为disabled后,点击事项无效;当点击文字**“请选择”**时无法触发点击事件,其父标签的其余位置均可触发 解决:只需要在input标签中添加 style“pointer-events:none” 即可 pointer-events: none 作用是…...

实战一个 Jenkins 构建 CI/CD流水线 的简单配置过程哈
引言:上一期我们讲述了gitlabCI/CD工具的介绍,工具之争,本期我们介绍Jenkins CI/CD 目录 一、Jenkins介绍 1、Jenkins概念 2、Jenkins目的 3、特性 4、产品发布流程 二、安装Jenkins 1、安装JDK 2、安装Jenkins 1、上传压缩包 2、…...
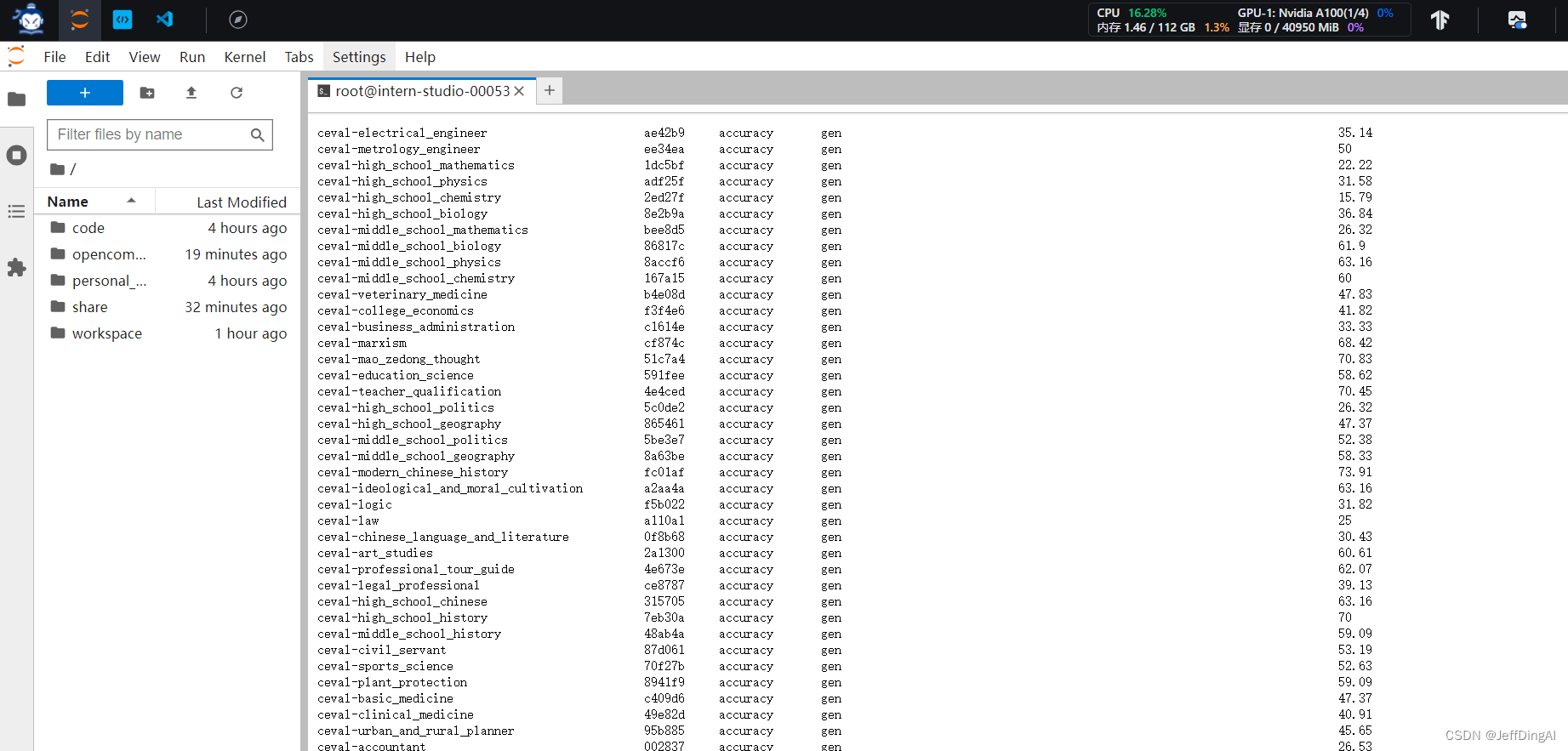
【InternLM 实战营笔记】大模型评测
随着人工智能技术的快速发展, 大规模预训练自然语言模型成为了研究热点和关注焦点。OpenAI于2018年提出了第一代GPT模型,开辟了自然语言模型生成式预训练的路线。沿着这条路线,随后又陆续发布了GPT-2和GPT-3模型。与此同时,谷歌也…...

数据卷(Data Volumes) 自定义镜像(dockerfile)
目录 一. 数据卷(Data Volumes) 1.1 什么是数据卷 1.2 为什么需要数据卷 1.3 数据卷的作用 1.4 数据卷的使用 二. 自定义镜像(dockerfile) 2.1 什么是dockerfile 2.2 自定义centos 2.3 自定义tomcat 一. 数据卷(Data…...
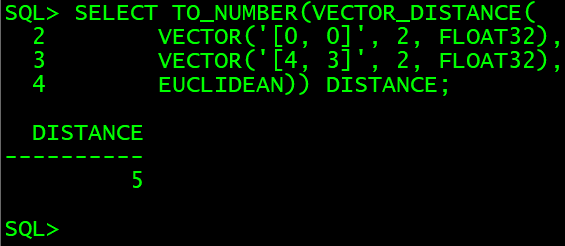
数据库管理-第156期 Oracle Vector DB AI-07(20240227)
数据库管理156期 2024-02-27 数据库管理-第156期 Oracle Vector DB & AI-07(20240227)1 Vector相关DDL操作可以在现有的表上新增vector数据类型的字段:可以删除包含vector数据类型的列:可以使用CTAS的方式,从其他有…...
CASAtomic原子操作详解
什么是原子操作?如何实现原子操作? 我们在接触到事务的时候,了解到事务的一大特性是原子性,一个事务要么全部执行、要么全部不执行。 并发里的原子性和事务里的原子性有一样的内涵和概念。假定有2个操作A和B都包含多个步骤…...

Explorer.exe进程占用100%导致Win10黑屏?深度解析注册表启动项与系统优化软件的冲突
Windows 10黑屏故障深度解析:从Explorer进程崩溃到系统启动项修复 上周帮朋友处理一台突然黑屏的Win10笔记本时,发现任务管理器里explorer.exe进程CPU占用率长期100%,重启后直接进入黑屏状态。这种看似简单的故障背后,其实是Wind…...

ECharts折线图标签智能避让:基于数据比较的动态上下布局方案
1. 为什么折线图标签会重叠? 做过数据可视化的朋友应该都遇到过这个头疼的问题——当多条折线密集交叉时,它们的数值标签经常会挤成一团。我刚开始用ECharts时,每次看到这种重叠的标签都特别烦躁,就像超市收银台排队时前面的人突然…...

别再死记硬背代码了!从‘简单计算器’题深入理解C++分支结构的本质与应用场景
从计算器案例看C分支结构:如何写出更优雅的条件判断 记得第一次参加信息学奥赛训练时,我对着OpenJudge平台上那道"简单计算器"题目发呆了半小时。不是不会写,而是在纠结到底该用switch还是if-else。这可能是每个C初学者都会遇到的…...

物联网设备调试难题:MQTT Explorer如何让MQTT调试可视化、智能化、跨平台
物联网设备调试难题:MQTT Explorer如何让MQTT调试可视化、智能化、跨平台 【免费下载链接】MQTT-Explorer An all-round MQTT client that provides a structured topic overview 项目地址: https://gitcode.com/gh_mirrors/mq/MQTT-Explorer MQTT Explorer是…...

别再死记硬背了!用‘生命周期’图解法,5分钟搞懂Android加固与脱壳的核心对抗点
用生命周期图解法透视Android加固与脱壳的核心对抗逻辑 第一次接触Android加固技术时,我盯着反编译工具里那些"类不存在"的报错信息发呆——明明APK文件就在那里,为什么连最基本的代码结构都看不到?直到把DEX文件的生命周期拆解成一…...

GitHub第一次开源贡献怎么做?以 First Contributions 项目为例,把 Fork、Clone、PR 一次讲明白
🤵♂️ 个人主页:小李同学_LSH的主页 ✍🏻 作者简介:LLM学习者 🐋 希望大家多多支持,我们一起进步!😄 如果文章对你有帮助的话, 欢迎评论 💬点赞Ǵ…...

Janus-Pro-7B企业级应用:基于Dify构建智能客服知识库
Janus-Pro-7B企业级应用:基于Dify构建智能客服知识库 很多企业都想用AI来升级客服系统,但一提到大模型,大家的第一反应往往是:技术门槛高、部署复杂、成本难以控制。有没有一种方法,能让企业快速、低成本地搭建一个真…...

C++11时间戳实战:从std::chrono::system_clock到可读日期
1. 为什么需要时间戳转换? 在日常开发中,时间戳的处理几乎无处不在。比如记录日志时,我们需要精确到毫秒的时间标记;在数据分析时,我们需要将原始时间戳转换为可读的日期格式;在跨系统交互时,我…...

JavaScript中闭包结合代理模式Proxy实现数据监听
JavaScript中用闭包配合Proxy实现数据监听的核心是:闭包封装私有状态(如data副本、effects数组)确保隔离,Proxy通过get/set拦截读写并触发依赖收集与更新,二者分工协作实现可控响应式。JavaScript中用闭包配合Proxy实现…...

FanControl完全指南:Windows风扇智能控制与静音优化的终极方案
FanControl完全指南:Windows风扇智能控制与静音优化的终极方案 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Tre…...