【51单片机】红外遥控红外遥控电机调速(江科大)
1.红外遥控简介
· 红外遥控是利用红外光进行通信的设备,由红外LED将调制后的信号发出,由专用的红外接收头进行解调输出
· 通信方式:单工,异步
· 红外LED波长:940nm
· 通信协议标准:NEC标准

2.硬件电路
红外发送部分
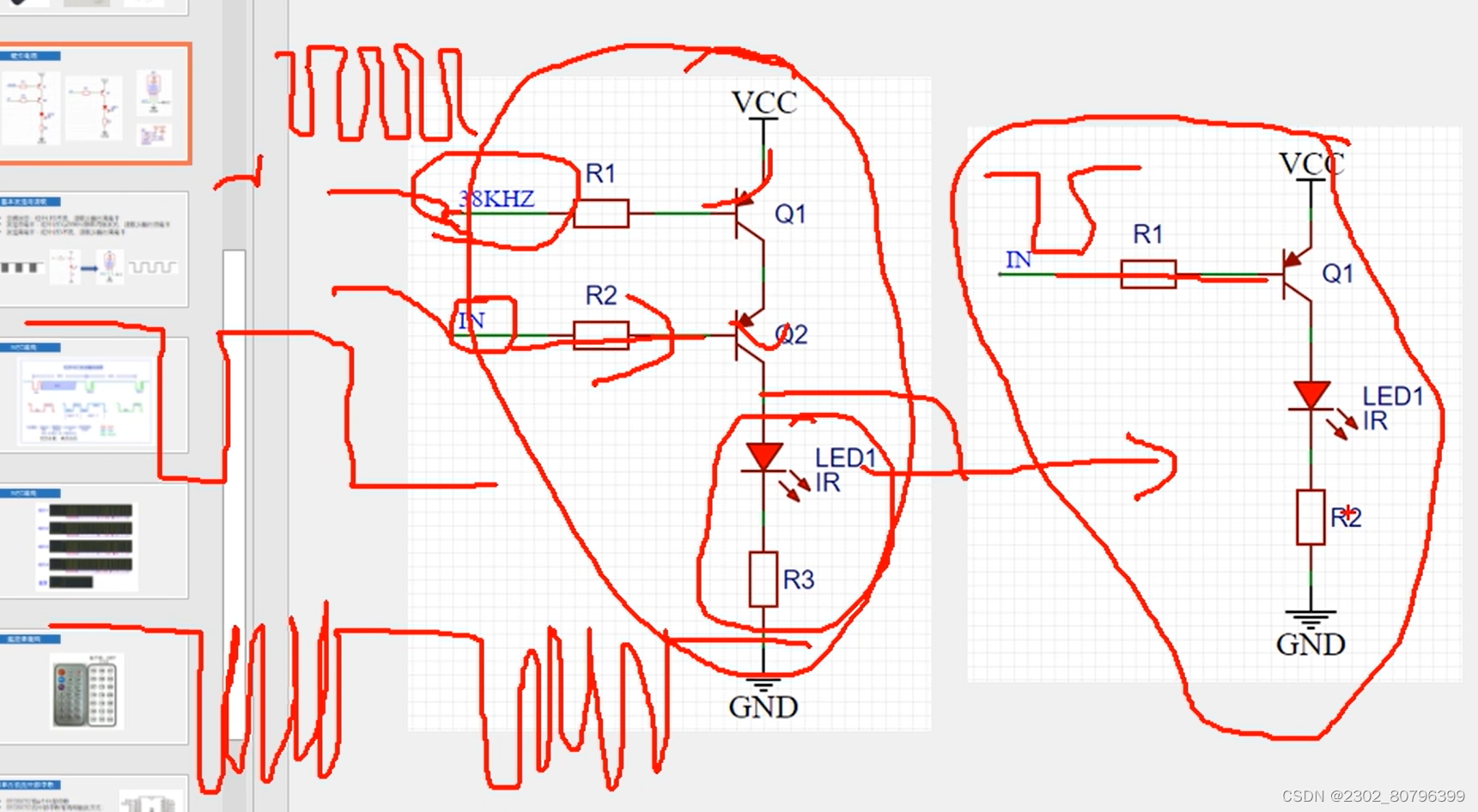
IN高电平时,LED不亮,IN低电平时,LED以38KHZ闪着亮,目的是为了抗干扰
红外接收部分
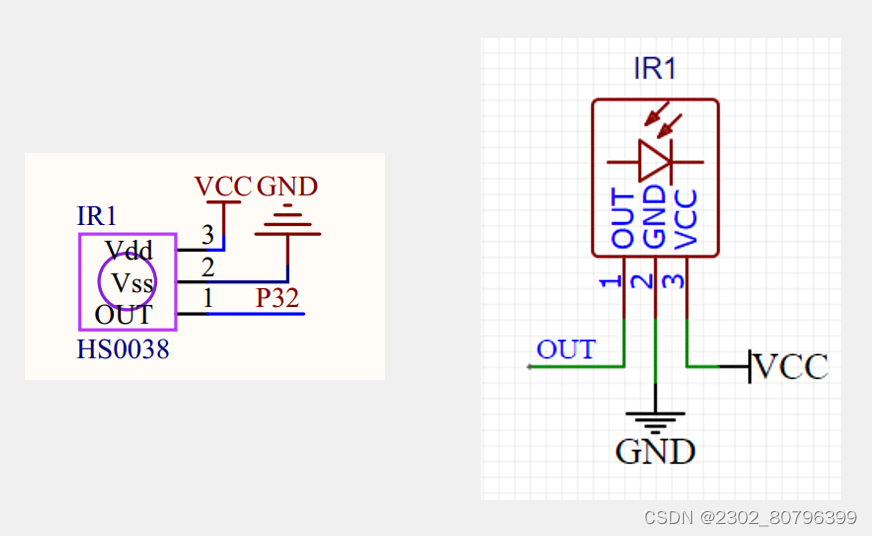
左图是开发板上的红外接收部分的原理图
右图是一体化的红外接收头的电路,其OUT口可以直接输出高低电平,在其内部会将38KHZ的波形给滤掉。在实际使用中,将OUT连接到外部中断,因为红外接收处理波形对实时性要求比较高(高低电平的宽度较短,只有几百微秒)
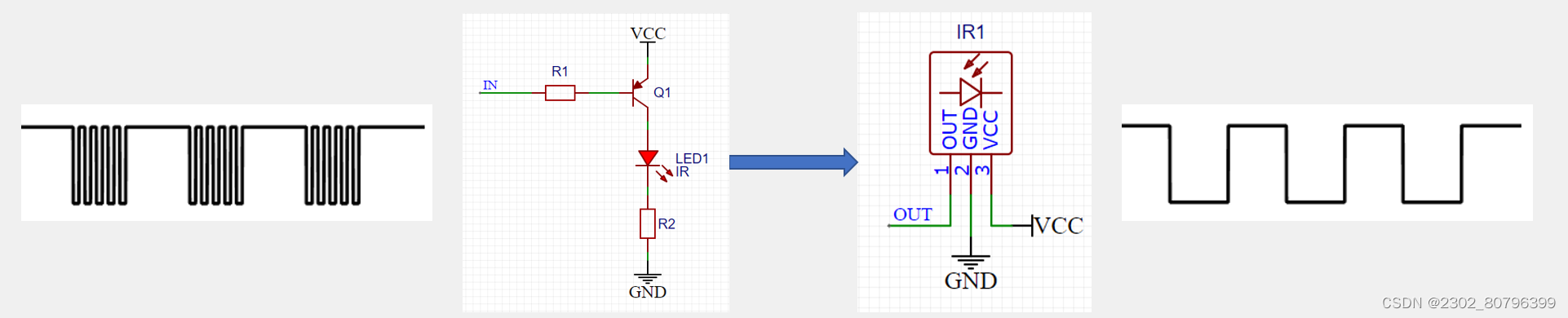
3.基本发送与接收
· 空闲状态:红外LED不亮,接收头输出高电平
·发送低电平:红外LED以38KHz频率闪烁发光,接收头输出低电平
· 发送高电平:红外LED不亮,接收头输出高电平
4.NEC编码
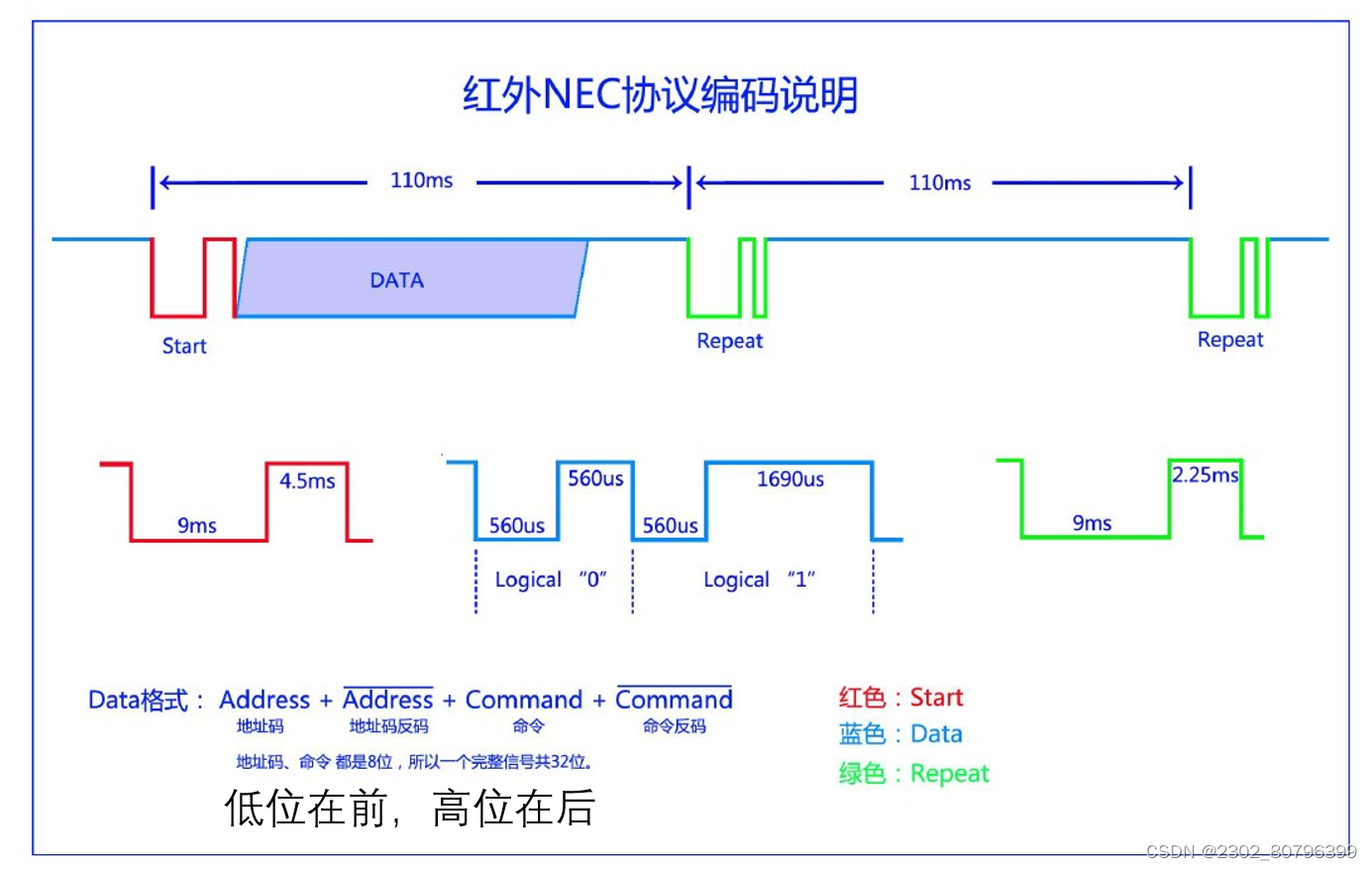
该波形是接收端OUT端口的波形
按键按下时,输出Start信号,该信号是由9ms的低电平和4.5ms的高电平组成
之后是数据区,共32位,格式如上图(反码的目的是进行数据的校验)
Repeat是支持按键长按的功能,每隔110ms就会发送这样的波形
实际波形图:
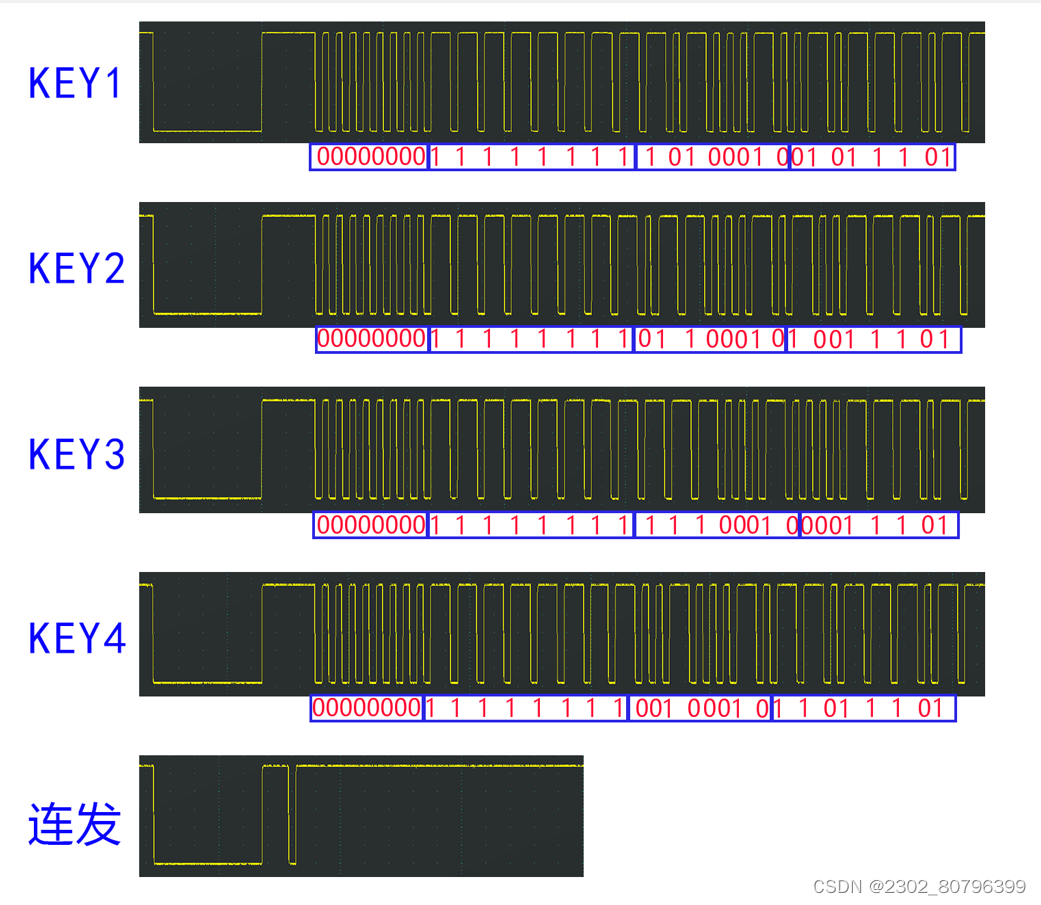
KEY1即按下遥控器第一个键码
5.遥控器键码

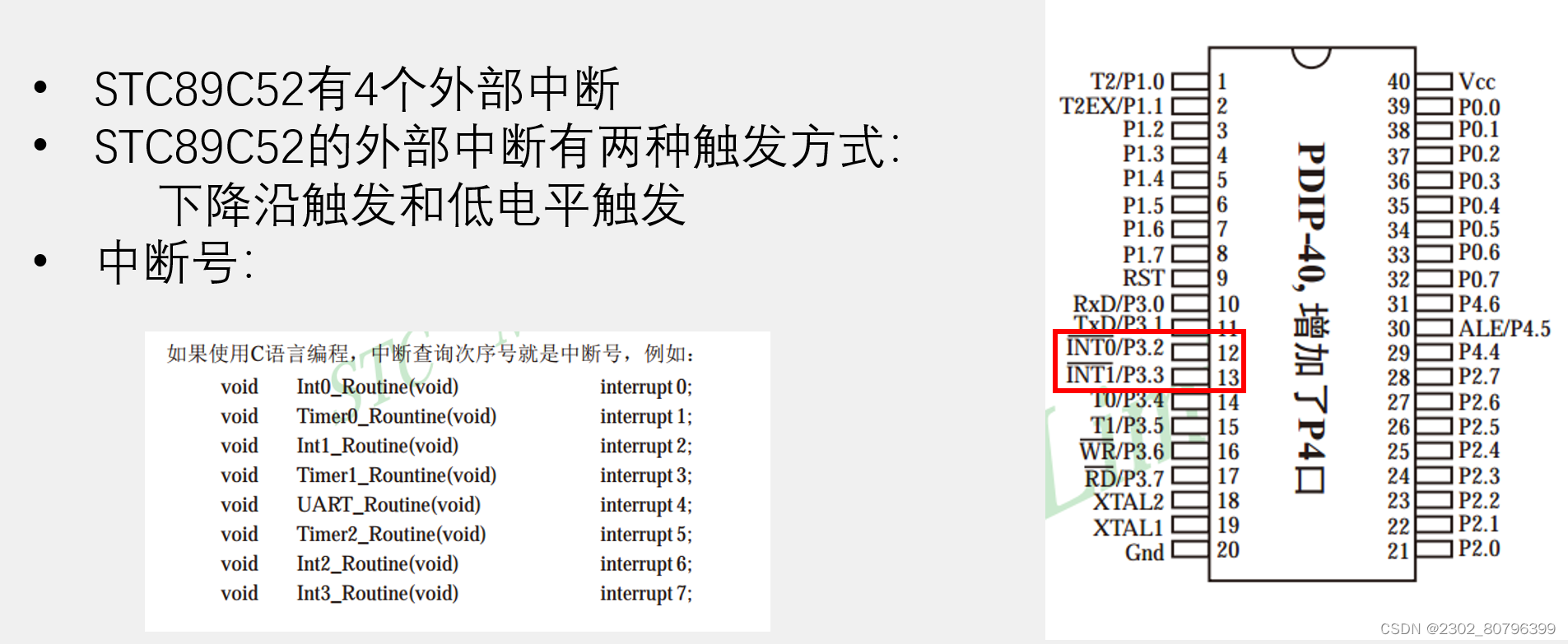
6.51单片机外部中断
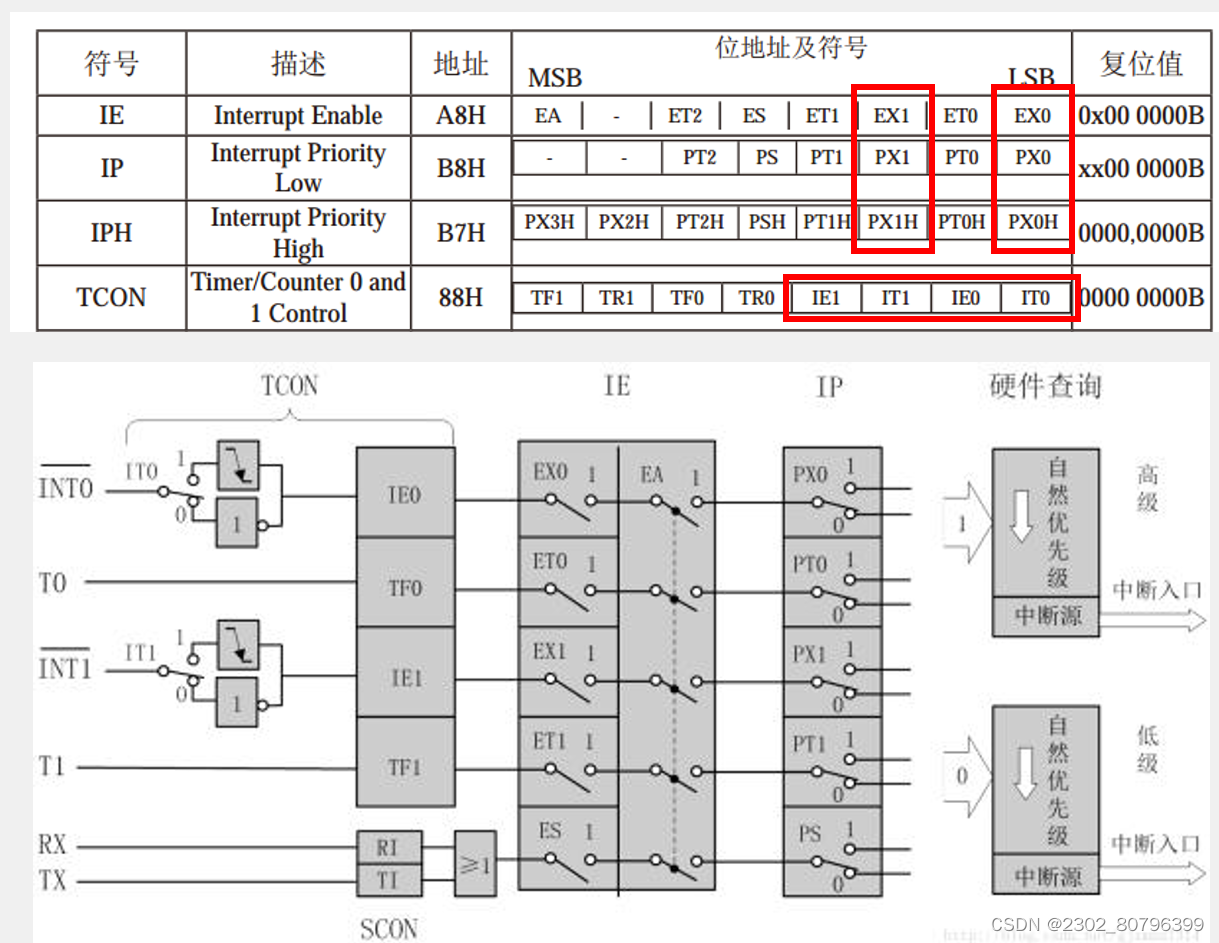
7.外部中断寄存器
P32引脚接INT0,P33引脚接INT1
IT0/IT1为1时下降沿触发,为0时低电平触发
IE0/IE1是中断标志位,当其为1时表示触发了该中断
8.红外遥控(外部中断)
现象:LCD屏幕显示遥控器的地址吗、按键的命令码以及自定义的变量Num。按下遥控器上的按键,LCD上显示的值也会随之发生改变。按VOL+键Num值会加,按VOL-键Num值会减,且支持长按。
IR.c用于存放红外解码相关程序,Int0.c用于存放外部中断0的相关程序
Int0.c用于存放外部中断0的相关程序
#include <REGX52.H>/*** @brief 外部中断0初始化* @param 无* @retval 无*/
void Int0_Init(void)
{IT0=1;IE0=0;EX0=1;EA=1;PX0=1;
}/*外部中断0中断函数模板
void Int0_Routine(void) interrupt 0
{}
*/
Int0.h
#ifndef __INT0_H__
#define __INT0_H__void Int0_Init(void);#endif
Timer0.c定时器0用于计数
#include <REGX52.H>/*** @brief 定时器0初始化* @param 无* @retval 无*/
void Timer0_Init(void)
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器0不计时
}/*** @brief 定时器0设置计数器值* @param Value,要设置的计数器值,范围:0~65535* @retval 无*/
void Timer0_SetCounter(unsigned int Value)
{TH0=Value/256;TL0=Value%256;
}/*** @brief 定时器0获取计数器值* @param 无* @retval 计数器值,范围:0~65535*/
unsigned int Timer0_GetCounter(void)
{return (TH0<<8)|TL0;
}/*** @brief 定时器0启动停止控制* @param Flag 启动停止标志,1为启动,0为停止* @retval 无*/
void Timer0_Run(unsigned char Flag)
{TR0=Flag;
}
Timer0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__void Timer0_Init(void);
void Timer0_SetCounter(unsigned int Value);
unsigned int Timer0_GetCounter(void);
void Timer0_Run(unsigned char Flag);#endif
IR.c用于存放红外解码相关程序
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"unsigned int IR_Time;
unsigned char IR_State;unsigned char IR_Data[4];
unsigned char IR_pData;unsigned char IR_DataFlag;
unsigned char IR_RepeatFlag;
unsigned char IR_Address;
unsigned char IR_Command;/*** @brief 红外遥控初始化* @param 无* @retval 无*/
void IR_Init(void)
{Timer0_Init();Int0_Init();
}/*** @brief 红外遥控获取收到数据帧标志位* @param 无* @retval 是否收到数据帧,1为收到,0为未收到*/
unsigned char IR_GetDataFlag(void)
{if(IR_DataFlag){IR_DataFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到连发帧标志位* @param 无* @retval 是否收到连发帧,1为收到,0为未收到*/
unsigned char IR_GetRepeatFlag(void)
{if(IR_RepeatFlag){IR_RepeatFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到的地址数据* @param 无* @retval 收到的地址数据*/
unsigned char IR_GetAddress(void)
{return IR_Address;
}/*** @brief 红外遥控获取收到的命令数据* @param 无* @retval 收到的命令数据*/
unsigned char IR_GetCommand(void)
{return IR_Command;
}//外部中断0中断函数,下降沿触发执行
void Int0_Routine(void) interrupt 0
{if(IR_State==0) //状态0,空闲状态{Timer0_SetCounter(0); //定时计数器清0Timer0_Run(1); //定时器启动IR_State=1; //置状态为1}else if(IR_State==1) //状态1,等待Start信号或Repeat信号{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)if(IR_Time>12442-500 && IR_Time<12442+500){IR_State=2; //置状态为2}//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)else if(IR_Time>10368-500 && IR_Time<10368+500){IR_RepeatFlag=1; //置收到连发帧标志位为1Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}else //接收出错{IR_State=1; //置状态为1}}else if(IR_State==2) //状态2,接收数据{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)if(IR_Time>1032-500 && IR_Time<1032+500){IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0IR_pData++; //数据位置指针自增}//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)else if(IR_Time>2074-500 && IR_Time<2074+500){IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1IR_pData++; //数据位置指针自增}else //接收出错{IR_pData=0; //数据位置指针清0IR_State=1; //置状态为1}if(IR_pData>=32) //如果接收到了32位数据{IR_pData=0; //数据位置指针清0if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证{IR_Address=IR_Data[0]; //转存数据IR_Command=IR_Data[2];IR_DataFlag=1; //置收到连发帧标志位为1}Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}}
}
IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8));
IR_Data是一个数组,表示红外数据。
IR_pData是一个变量,表示要修改的位的位置。
IR_pData/8表示要修改的位所在的字节位置。
IR_pData%8表示要修改的位在字节中的偏移量。
0x01<<(IR_pData%8)表示将1左移IR_pData%8位,得到一个只有第IR_pData%8位为1的二进制数。
~(0x01<<(IR_pData%8))表示对上述二进制数取反,得到一个只有第IR_pData%8位为0的二进制数。
IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8))表示将IR_Data中第IR_pData/8字节的第IR_pData%8位清零。
简而言之,这条语句的作用是将IR_Data中指定位置的位清零。
IR.h
#ifndef __IR_H__
#define __IR_H__#define IR_POWER 0x45
#define IR_MODE 0x46
#define IR_MUTE 0x47
#define IR_START_STOP 0x44
#define IR_PREVIOUS 0x40
#define IR_NEXT 0x43
#define IR_EQ 0x07
#define IR_VOL_MINUS 0x15
#define IR_VOL_ADD 0x09
#define IR_0 0x16
#define IR_RPT 0x19
#define IR_USD 0x0D
#define IR_1 0x0C
#define IR_2 0x18
#define IR_3 0x5E
#define IR_4 0x08
#define IR_5 0x1C
#define IR_6 0x5A
#define IR_7 0x42
#define IR_8 0x52
#define IR_9 0x4Avoid IR_Init(void);
unsigned char IR_GetDataFlag(void);
unsigned char IR_GetRepeatFlag(void);
unsigned char IR_GetAddress(void);
unsigned char IR_GetCommand(void);#endif
main.c
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "IR.h"unsigned char Num;
unsigned char Address;
unsigned char Command;void main()
{LCD_Init();LCD_ShowString(1,1,"ADDR CMD NUM");LCD_ShowString(2,1,"00 00 000");IR_Init();while(1){if(IR_GetDataFlag() || IR_GetRepeatFlag()) //如果收到数据帧或者收到连发帧{Address=IR_GetAddress(); //获取遥控器地址码Command=IR_GetCommand(); //获取遥控器命令码LCD_ShowHexNum(2,1,Address,2); //显示遥控器地址码LCD_ShowHexNum(2,7,Command,2); //显示遥控器命令码if(Command==IR_VOL_MINUS) //如果遥控器VOL-按键按下{Num--; //Num自减}if(Command==IR_VOL_ADD) //如果遥控器VOL+按键按下{Num++; //Num自增}LCD_ShowNum(2,12,Num,3); //显示Num}}
}
9.红外遥控电机调速
现象:通过遥控器的0、1、2、3按键来控制电机转速,同时数码管上会显示按下了哪个按键。
配置定时器1 为了区别于定时器0
Timer1.c
#include <REGX52.H>/*** @brief 定时器1初始化,100us@12.000MHz* @param 无* @retval 无*/
void Timer1_Init(void)
{TMOD &= 0x0F; //设置定时器模式TMOD |= 0x10; //设置定时器模式TL1 = 0x9C; //设置定时初值TH1 = 0xFF; //设置定时初值TF1 = 0; //清除TF1标志TR1 = 1; //定时器1开始计时ET1=1;EA=1;PT1=0;
}/*定时器中断函数模板
void Timer1_Routine() interrupt 3
{static unsigned int T1Count;TL1 = 0x9C; //设置定时初值TH1 = 0xFF; //设置定时初值T1Count++;if(T1Count>=1000){T1Count=0;}
}
*/
Timer1.h
#ifndef __TIMER1_H__
#define __TIMER1_H__void Timer1_Init(void);#endif
Motor.c
#include <REGX52.H>
#include "Timer1.h"//引脚定义
sbit Motor=P1^0;unsigned char Counter,Compare;/*** @brief 电机初始化* @param 无* @retval 无*/
void Motor_Init(void)
{Timer1_Init();
}/*** @brief 电机设置速度* @param Speed 要设置的速度,范围0~100* @retval 无*/
void Motor_SetSpeed(unsigned char Speed)
{Compare=Speed;
}//定时器1中断函数
void Timer1_Routine() interrupt 3
{TL1 = 0x9C; //设置定时初值TH1 = 0xFF; //设置定时初值Counter++;Counter%=100; //计数值变化范围限制在0~99if(Counter<Compare) //计数值小于比较值{Motor=1; //输出1}else //计数值大于比较值{Motor=0; //输出0}
}
Motor.h
#ifndef __MOTOR_H__
#define __MOTOR_H__void Motor_Init(void);
void Motor_SetSpeed(unsigned char Speed);#endif
main.c
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Motor.h"
#include "IR.h"unsigned char Command,Speed;void main()
{Motor_Init();IR_Init();while(1){if(IR_GetDataFlag()) //如果收到数据帧{Command=IR_GetCommand(); //获取遥控器命令码if(Command==IR_0){Speed=0;} //根据遥控器命令码设置速度if(Command==IR_1){Speed=1;}if(Command==IR_2){Speed=2;}if(Command==IR_3){Speed=3;}if(Speed==0){Motor_SetSpeed(0);} //速度输出if(Speed==1){Motor_SetSpeed(50);}if(Speed==2){Motor_SetSpeed(75);}if(Speed==3){Motor_SetSpeed(100);}}Nixie(1,Speed); //数码管显示速度}
}
相关文章:
【51单片机】红外遥控红外遥控电机调速(江科大)
1.红外遥控简介 红外遥控是利用红外光进行通信的设备,由红外LED将调制后的信号发出,由专用的红外接收头进行解调输出 通信方式:单工,异步 红外LED波长:940nm 通信协议标准:NEC标准 2.硬件电路 红外发送部分 IN高电平时,LED不亮,IN低电平时&…...
kubesphere jenkins 流水线 未运行(解决方案)
场景: 在kubesphere 中运行 流水线 devops 结果,显示未运行 但是用 admin 账户是可以运行成功的。 问题解决 1- 查日志: 然后 Caused: org.acegisecurity.userdetails.UsernameNotFoundException: org.springframework.security.core.…...

如何保护服务器的安全
互联网的迅速发展,让很多企业都很重视网络技术的使用,但是网络的传播速度比较快,同时容易造成数据、隐私方面的泄露现在每个企业基本有自己的服务器。有几点需要注意,可以参考: 1.基础密码安全 最基本的安全就是密码安…...

Python使用HDL 模拟器实现 FPGA 板卡的仿真验证
Python 结合 HDL 模拟器实现 FPGA 板卡的仿真验证,您可以借助一些开源工具和库来实现这一目的。下面我将为您介绍一种常用的方法,使用 Python 结合 Verilog 模拟器和 FPGA 开发工具进行仿真验证。 ### 步骤概述 1. **编写 Verilog 设计**:首…...

vue中 input disable后无法触发点击事件
问题:input标签为disabled后,点击事项无效;当点击文字**“请选择”**时无法触发点击事件,其父标签的其余位置均可触发 解决:只需要在input标签中添加 style“pointer-events:none” 即可 pointer-events: none 作用是…...

实战一个 Jenkins 构建 CI/CD流水线 的简单配置过程哈
引言:上一期我们讲述了gitlabCI/CD工具的介绍,工具之争,本期我们介绍Jenkins CI/CD 目录 一、Jenkins介绍 1、Jenkins概念 2、Jenkins目的 3、特性 4、产品发布流程 二、安装Jenkins 1、安装JDK 2、安装Jenkins 1、上传压缩包 2、…...
【InternLM 实战营笔记】大模型评测
随着人工智能技术的快速发展, 大规模预训练自然语言模型成为了研究热点和关注焦点。OpenAI于2018年提出了第一代GPT模型,开辟了自然语言模型生成式预训练的路线。沿着这条路线,随后又陆续发布了GPT-2和GPT-3模型。与此同时,谷歌也…...

数据卷(Data Volumes) 自定义镜像(dockerfile)
目录 一. 数据卷(Data Volumes) 1.1 什么是数据卷 1.2 为什么需要数据卷 1.3 数据卷的作用 1.4 数据卷的使用 二. 自定义镜像(dockerfile) 2.1 什么是dockerfile 2.2 自定义centos 2.3 自定义tomcat 一. 数据卷(Data…...
数据库管理-第156期 Oracle Vector DB AI-07(20240227)
数据库管理156期 2024-02-27 数据库管理-第156期 Oracle Vector DB & AI-07(20240227)1 Vector相关DDL操作可以在现有的表上新增vector数据类型的字段:可以删除包含vector数据类型的列:可以使用CTAS的方式,从其他有…...
CASAtomic原子操作详解
什么是原子操作?如何实现原子操作? 我们在接触到事务的时候,了解到事务的一大特性是原子性,一个事务要么全部执行、要么全部不执行。 并发里的原子性和事务里的原子性有一样的内涵和概念。假定有2个操作A和B都包含多个步骤…...

真机测试——关于荣耀Magic UI系列HBuilder真机调试检测不到解决办法
出现这种状况怎么办 1、开启USB调试 2、重点来了——我们要选择USB配置,选择音频来源 3、连接OK...
代理IP安全问题:在国外使用代理IP是否安全
目录 前言 一、国外使用代理IP的安全风险 1. 数据泄露 2. 恶意软件 3. 网络攻击 4. 法律风险 二、保护国外使用代理IP的安全方法 1. 选择可信的代理服务器 2. 使用加密协议 3. 定期更新系统和软件 4. 注意网络安全意识 三、案例分析 总结 前言 在互联网时代&…...

SonarLint 疑难语法修正
/*** 投诉率统计(厂端)* 1.通过售后小区分组统计* 2.通过经销商分组统计* param kpiComplaintRateQueryVO 查询参数* return 投诉率统计数据*/ApiOperation(value "厂端投诉率统计维度查询")PostMapping("/vcdc/ratestatis")public List<KpiComplaintR…...

MurmurHash算法
MurmurHash:(multiply and rotate) and (multiply and rotate) Hash,乘法和旋转的hash 算法。 一、哈希函数 散列函数(英语:Hash function)又称散列算法、哈希函数,是一种从任何一种数据中创建小的数字“…...
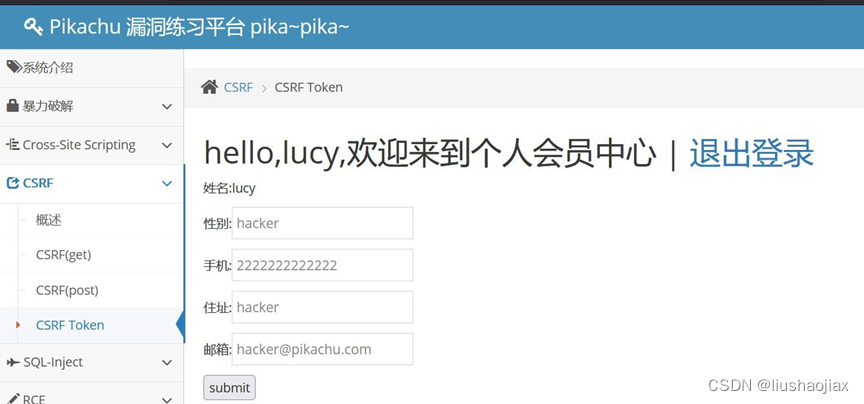
CSRF靶场实战
DVWA靶场链接:https://pan.baidu.com/s/1eUlPyB-gjiZwI0wsNW_Vkw?pwd0b52 提取码:0b52 DVWA Low 级别打开靶场,修改密码 复制上面的 url,写个简单的 html 文件 <html <body> <a hrefhttp://127.0.0.1/DVWA/vulne…...
小程序性能优化
背景 在开发小程序的过程中我们发现,小程序的经常会遇到性能问题,尤其是在微信开发者工具的时候更是格外的卡,经过排查发现,卡顿的页面有这么多的js代码需要加载,而且都是在进入这个页面的时候加载,这就会…...

C++拿几道题练练手吧
第 1 题 【 问答题 】 • 最短路径问题 平面上有n个点(n<100),每个点的坐标均在-10000~10000之间。其中的一些点之间有连线。 若有连线,则表示可从一个点到达另一个点,即两点间有通路,通路的距离为两点间的直线距离。现在的任务…...

【国产MCU】-CH32V307-I2C控制器
I2C控制器 文章目录 I2C控制器1、I2C模块介绍2、I2C驱动API介绍3、I2C使用实例3.1 主模式3.1.1 主设备发送模式和主设备接收模式3.1.2 DMA方式发送3.2 从模式内部集成电路总线(I2C)广泛用在微控制器和传感器及其他片外模块的通讯上,它本身支持多主多从模式,仅仅使用两根线(…...

k8s pod理论
一、Pod概述 1、Pod的定义 Pod是K8S中创建和管理的最小单位。 2、一个Pod至少包含多少容器 1个pause容器(基础容器/父容器/根容器)和 1个或者多个应用容器(业务容器) 通常一个Pod最好只包含一个应用容器,一个应用容…...

智慧应急:构建全方位、立体化的安全保障网络
一、引言 在信息化、智能化快速发展的今天,传统的应急管理模式已难以满足现代社会对安全保障的需求。智慧应急作为一种全新的安全管理模式,旨在通过集成物联网、大数据、云计算、人工智能等先进技术,实现对应急事件的快速响应、精准决策和高…...

告别玄学调参:用Cubemx HAL库+MPU6050 DMP,给你的STM32平衡小车一个‘出厂设置’
从零构建STM32平衡小车:HAL库与DMP的黄金组合 平衡小车一直是嵌入式开发者和电子竞赛选手的热门项目,它不仅考验硬件搭建能力,更是对软件算法和传感器融合技术的全面检验。传统方法中,开发者往往需要从零开始处理MPU6050的原始数据…...

避坑指南:用System Generator生成FPGA滤波代码,为什么我劝你谨慎?
警惕图形化工具陷阱:FPGA数字滤波开发的硬核真相 在FPGA开发领域,图形化设计工具如System Generator常被宣传为"快速实现复杂算法"的银弹。许多初入行的工程师会被其直观的拖拽界面和自动代码生成功能所吸引,尤其是在处理数字滤波这…...
)
LlamaFirewall实战:5分钟搞定大模型安全防护(附Python代码示例)
LlamaFirewall实战:5分钟搞定大模型安全防护(附Python代码示例) 大模型技术的快速发展带来了前所未有的生产力提升,但同时也引入了新的安全风险。从恶意提示注入到危险代码生成,这些安全隐患可能对企业和开发者造成严重…...

2026届毕业生推荐的五大降AI率平台推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 正处于人工智能辅助写作越来越普遍的当前状况下,怎样能够切实有效地减少文本所具…...

Path of Building汉化版终极教程:5步从新手到流放之路BD大师
Path of Building汉化版终极教程:5步从新手到流放之路BD大师 【免费下载链接】PoeCharm Path of Building Chinese version 项目地址: https://gitcode.com/gh_mirrors/po/PoeCharm 还在为流放之路复杂的角色构建而烦恼吗?面对英文界面和繁琐的计…...
)
从‘背答案’到‘真理解’:给CV新手的过拟合避坑指南(含数据增强实战)
从‘背答案’到‘真理解’:给CV新手的过拟合避坑指南(含数据增强实战) 当你第一次训练计算机视觉模型时,可能会遇到一个令人沮丧的现象:模型在训练集上表现近乎完美,却在从未见过的测试数据上一塌糊涂。这就…...

Spring Boot WebFlux 响应式性能测试
Spring Boot WebFlux响应式性能测试:解锁高并发潜力 在当今高并发、低延迟的应用场景中,传统的同步阻塞式架构逐渐暴露出性能瓶颈。Spring Boot WebFlux作为响应式编程的典范,通过非阻塞I/O和事件驱动模型,为开发者提供了更高效的…...

3分钟掌握PPTist模板系统:打造专业演示文稿的终极秘籍
3分钟掌握PPTist模板系统:打造专业演示文稿的终极秘籍 【免费下载链接】PPTist PowerPoint-ist(/pauəpɔintist/), An online presentation application that replicates most of the commonly used features of MS PowerPoint, allowing fo…...
)
别再手动点点点了!用MeterSphere一站式搞定接口、性能与测试管理(附Docker部署避坑指南)
MeterSphere实战指南:从Docker部署到全流程测试自动化 在软件测试领域,重复劳动如同西西弗斯推石上山的永恒惩罚——测试人员不断编写用例、执行回归、分析结果,周而复始。传统测试工具各自为政,接口测试用Postman,性能…...
)
手把手教你用ESP32和LT8705复刻电赛C题三端口DC-DC变换器(附完整代码与PCB)
从零构建三端口DC-DC变换器:ESP32与LT8705实战指南 在电子设计竞赛和实际电源系统开发中,多端口DC-DC变换器的设计与实现一直是技术难点与热点。本文将带你完整实现一个基于ESP32和LT8705的三端口变换系统,涵盖硬件选型、电路设计、PCB制作到…...