【C++ AVL树】
文章目录
- AVL树
- AVL树的概念
- AVL树节点的定义
- AVL树的插入
- AVL树的旋转
- 右单旋
- 左单旋
- 左右双旋
- 右左双旋
- 代码实现
- 总结
AVL树
AVL树的概念
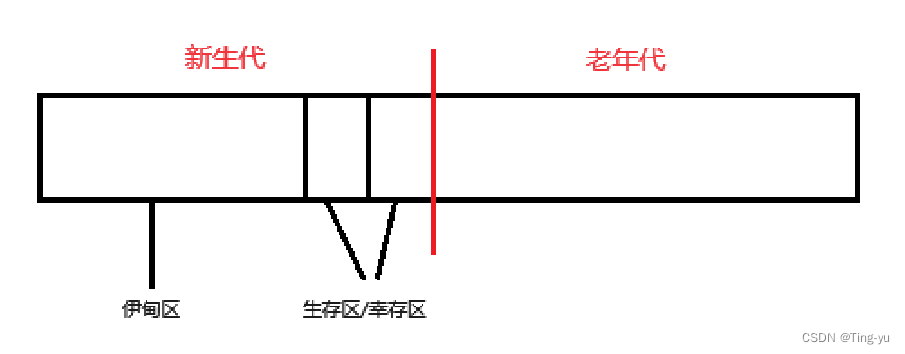
二叉搜索树在顺序有序或接近有序的情况下,而插入搜索树将退化为单叉树,此时查找的时间复杂度为O(n),效率低下。
两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新节点后,保证每个节点的左右子树高度差的绝对值不超过1,即可降低树的高度,减少平均搜索长度。因此,AVL树也被叫做高度平衡二叉搜索树,插入,查找,删除在平均和最坏情况下的时间复杂度都是O( l o g 2 n log_2 n log2n)。
AVL树节点的定义
template<class K, class V>struct AVLTreeNode{AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;pair<K, V> _kv;int _bf; //balance factor 平衡因子AVLTreeNode(const pair<K, V>& kv):_left(nullptr),_right(nullptr),_parent(nullptr),_kv(kv),_bf(0){}};
注意:实现AVL树平衡因子不是必须的,只不过有了平衡因子帮助我们更便捷地控制整棵树。
AVL树的插入
- 根据二叉搜索树的规则插入新节点
bool Insert(const pair<K, V> & kv){root为空,特殊处理if (_root == nullptr){_root = new Node(kv);return true;}Node* curr = _root;Node* parent = nullptr;while (curr){if (curr->_kv.first < kv.first){parent = curr;curr = curr->_right;}else if (curr->_kv.first > kv.first){parent = curr;curr = curr->_left;}else{return false;}}将新节点和其父亲节点链接起来Node* newnode = new Node(kv);if (parent->_kv.first < kv.first)parent->_right = newnode;elseparent->_left = newnode;newnode->_parent = parent;......}
- 不断向上更新平衡因子
- 当前平衡因子为0,说明插入之前平衡因子为1 / -1,插入之后不改变树的高度,不会影响其他祖先节点,此时更新结束。
- 当前平衡因子为1 / -1,说明插入之前平衡因子为0,插入之后当前节点地高度发生变化,会影响其他祖先节点,但是不违反规则,需要向上对祖先节点进行更新,直至当前节点为root。
- 当前平衡因子为 2 / -2,此时当前节点所在地子树违反了平衡规则,需要进行处理–>旋转。
while (parent)
{if (parent->_left == newnode){parent->_bf--;}else{parent->_bf++;}if (parent->_bf == 0)break;else if (parent->_bf == -1 || parent->_bf == 1){newnode = parent;parent = parent->_parent;}else if (parent->_bf == -2 || parent->_bf == 2){旋转处理}else{assert(false);}
}
AVL树的旋转
右单旋
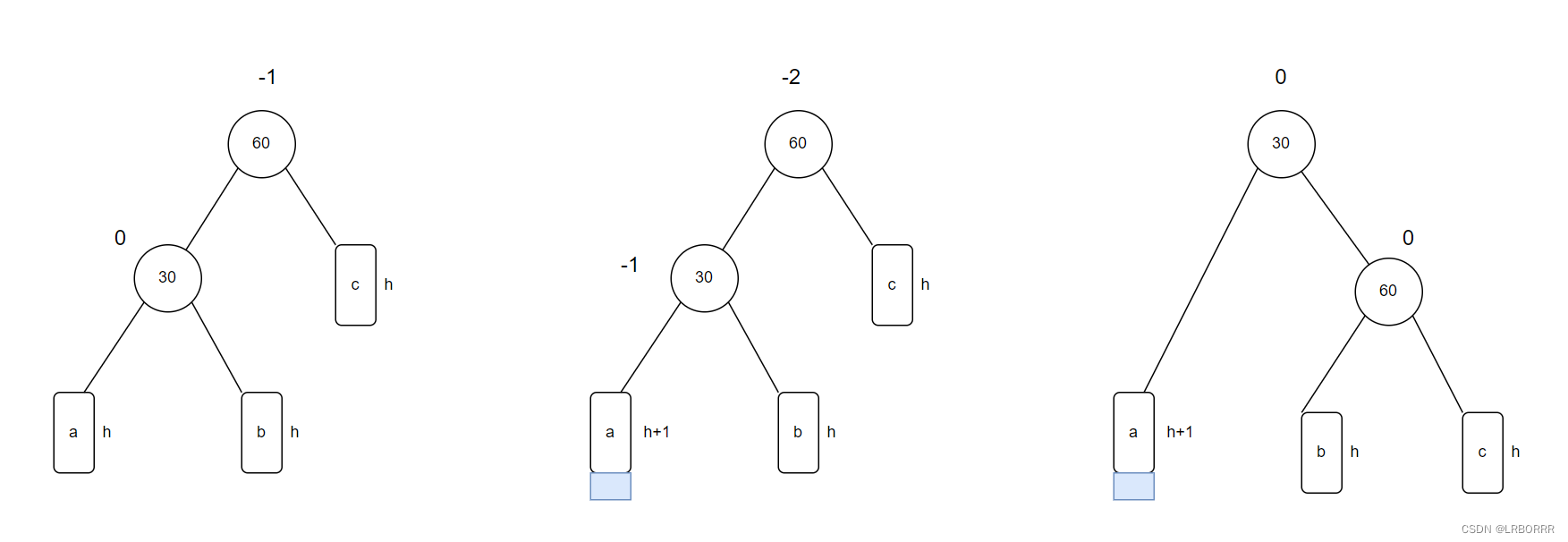
void RotatoR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;subL->_right = parent;Node* ppnode = parent->_parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (ppnode->_left == parent)ppnode->_left = subL;elseppnode->_right = subL;subL->_parent = ppnode;}parent->_bf = 0;subL->_bf = 0;
}
左单旋
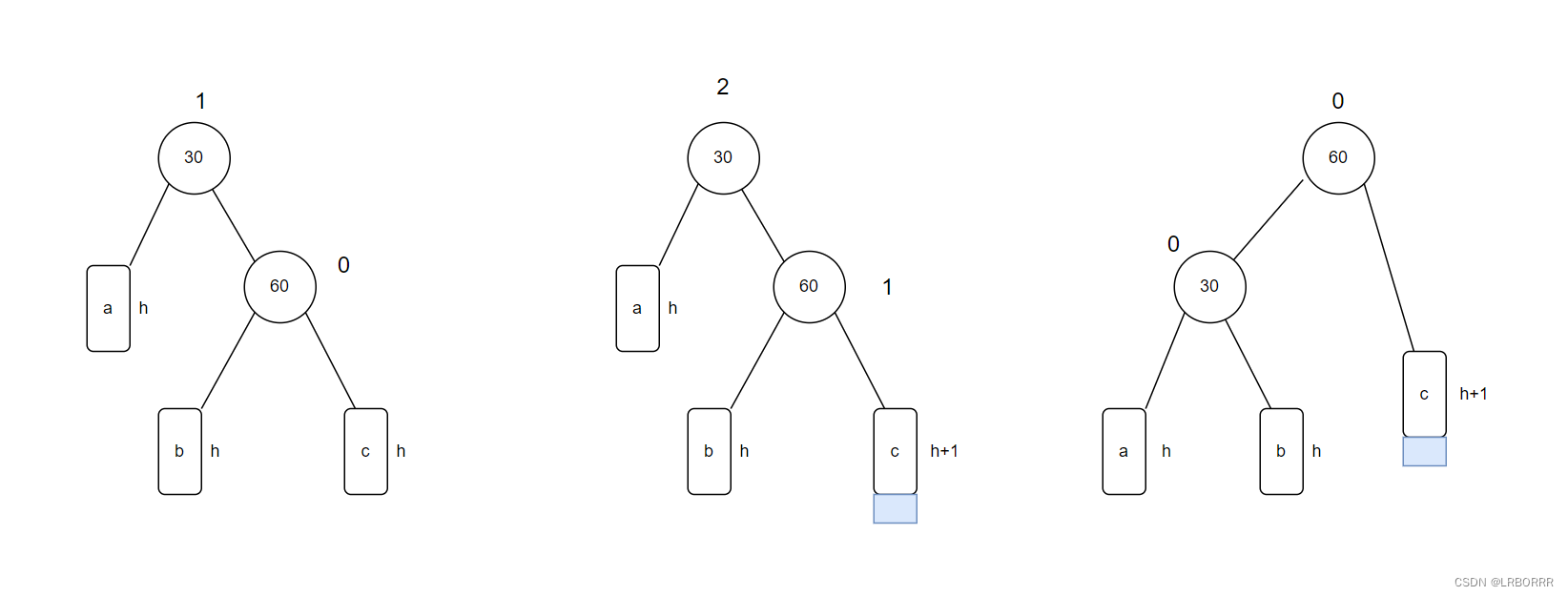
void RotatoL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;subR->_left = parent;Node* ppnode = parent->_parent;parent->_parent = subR;if (parent == _root){_root = subR;subR->_parent = nullptr;}else{if (ppnode->_left == parent)ppnode->_left = subR;elseppnode->_right = subR;subR->_parent = ppnode;}parent->_bf = 0;subR->_bf = 0;
}
左右双旋
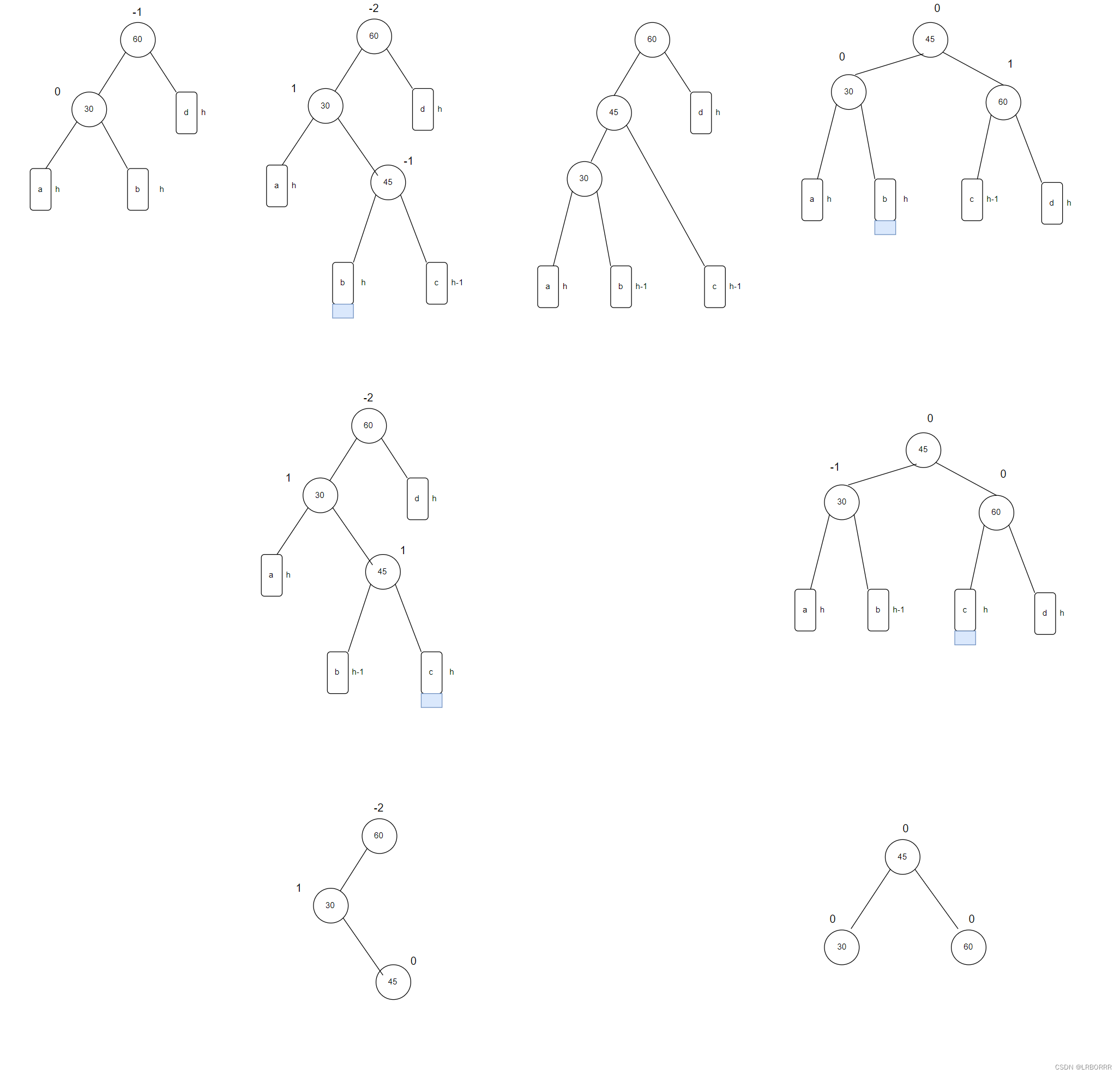
旋转之前,45的平衡因子可能是-1/0/1,旋转完成之后,根据情况对其他节点的平衡因子进行调整
void RotatoLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotatoL(subL);RotatoR(parent);subLR->_bf = 0;if (bf == 0){subL->_bf = 0;parent->_bf = 0;}else if (bf == 1){subL->_bf = -1;parent->_bf = 0;}else if (bf == -1){subL->_bf = 0;parent->_bf = 1;}
}
右左双旋
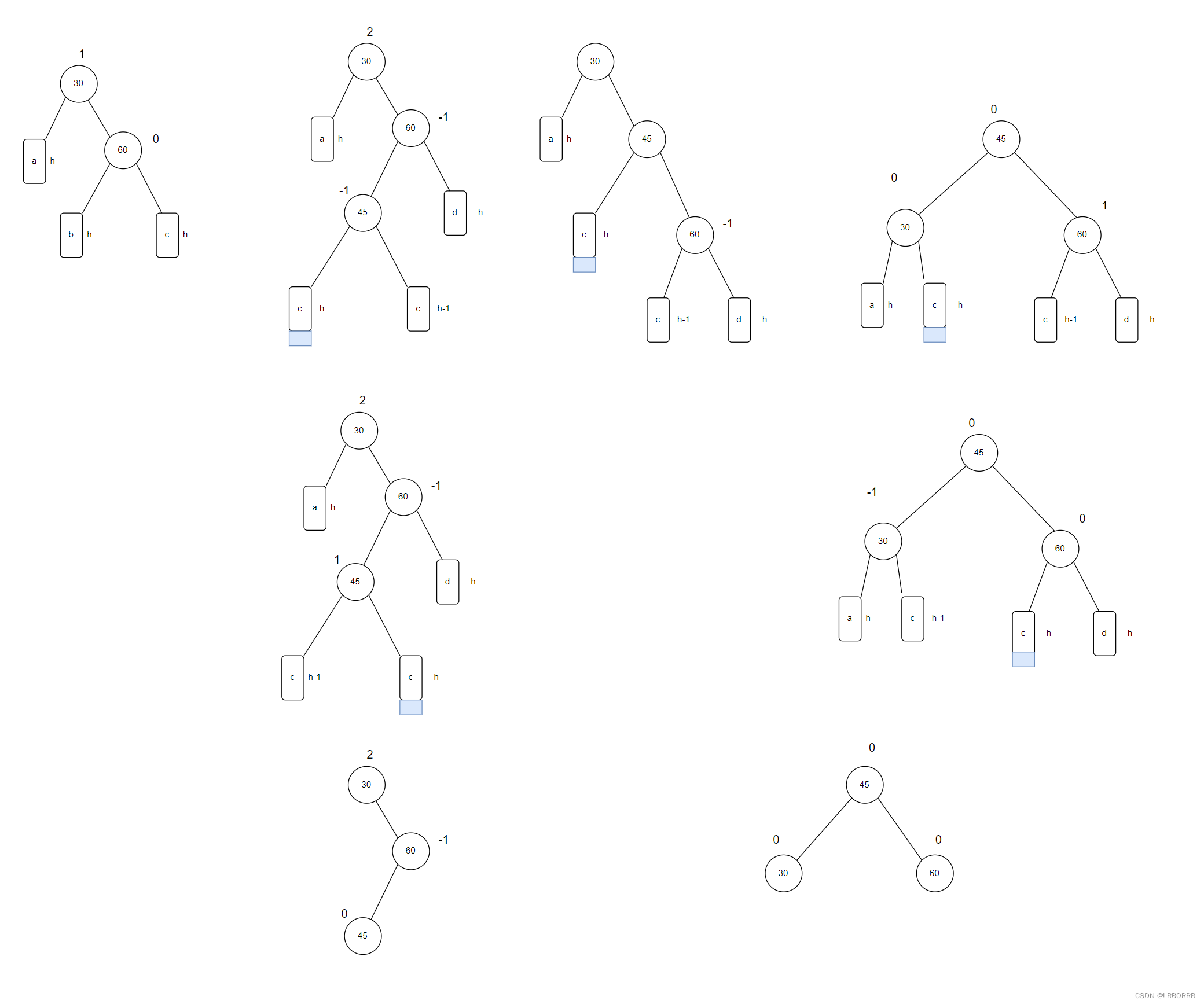
void RotatoRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;subRL->_bf = 0;RotatoR(subR);RotatoL(parent);if (bf == 0){subR->_bf = 0;parent->_bf = 0;}else if (bf == 1){subR->_bf = 0;parent->_bf = -1;}else if (bf == -1){subR->_bf = 1;parent->_bf = 0;}
}
代码实现
namespace xxx
{template<class K, class V>struct AVLTreeNode{AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;pair<K, V> _kv;int _bf; //balance factor 平衡因子AVLTreeNode(const pair<K, V>& kv):_left(nullptr),_right(nullptr),_parent(nullptr),_kv(kv),_bf(0){}};template<class K, class V>class AVLTree{typedef AVLTreeNode<K, V> Node;public:bool Insert(const pair<K, V> & kv){if (_root == nullptr){_root = new Node(kv);return true;}Node* curr = _root;Node* parent = nullptr;while (curr){if (curr->_kv.first < kv.first){parent = curr;curr = curr->_right;}else if (curr->_kv.first > kv.first){parent = curr;curr = curr->_left;}else{return false;}}Node* newnode = new Node(kv);if (parent->_kv.first < kv.first)parent->_right = newnode;elseparent->_left = newnode;newnode->_parent = parent;while (parent){if (parent->_left == newnode){parent->_bf--;}else{parent->_bf++;}if (parent->_bf == 0)break;else if (parent->_bf == -1 || parent->_bf == 1){newnode = parent;parent = parent->_parent;}else if (parent->_bf == -2 || parent->_bf == 2){if (parent->_bf == 2 && newnode->_bf == 1){RotatoL(parent);}else if (parent->_bf == -2 && newnode->_bf == -1){RotatoR(parent);}else if (parent->_bf == -2 && newnode->_bf == 1){RotatoLR(parent);}else if (parent->_bf == 2 && newnode->_bf == -1){RotatoRL(parent);}else{assert(false);}break;}else{assert(false);}}return true;}void RotatoL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;subR->_left = parent;Node* ppnode = parent->_parent;parent->_parent = subR;if (parent == _root){_root = subR;subR->_parent = nullptr;}else{if (ppnode->_left == parent)ppnode->_left = subR;elseppnode->_right = subR;subR->_parent = ppnode;}parent->_bf = 0;subR->_bf = 0;}void RotatoR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;subL->_right = parent;Node* ppnode = parent->_parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (ppnode->_left == parent)ppnode->_left = subL;elseppnode->_right = subL;subL->_parent = ppnode;}parent->_bf = 0;subL->_bf = 0;}void RotatoLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotatoL(subL);RotatoR(parent);subLR->_bf = 0;if (bf == 0){subL->_bf = 0;parent->_bf = 0;}else if (bf == 1){subL->_bf = -1;parent->_bf = 0;}else if (bf == -1){subL->_bf = 0;parent->_bf = 1;}}void RotatoRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;subRL->_bf = 0;RotatoR(subR);RotatoL(parent);if (bf == 0){subR->_bf = 0;parent->_bf = 0;}else if (bf == 1){subR->_bf = 0;parent->_bf = -1;}else if (bf == -1){subR->_bf = 1;parent->_bf = 0;}}void InOrder(){_InOrder(_root);cout << endl;}bool IsAVLTree(){return _IsAVLTree(_root);}private:bool _IsAVLTree(Node* root){if (root == nullptr)return true;int leftH = Height(root->_left);int rightH = Height(root->_right);return abs(leftH - rightH) <= 1&& _IsAVLTree(root->_left)&& _IsAVLTree(root->_right);}int Height(Node* node){if (node == nullptr)return 0;int leftH = Height(node->_left);int rightH = Height(node->_right);return 1 + max(leftH, rightH);}void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);cout << root->_kv.second << ' ';_InOrder(root->_right);}Node* _root = nullptr;};
}
总结
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这样可以保证查询时高效的时间复杂度,即 l o g 2 ( N ) log_2 (N) log2(N)。但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多。因此:如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修改,就不太适合。
相关文章:
【C++ AVL树】
文章目录 AVL树AVL树的概念AVL树节点的定义AVL树的插入AVL树的旋转右单旋左单旋左右双旋右左双旋 代码实现 总结 AVL树 AVL树的概念 二叉搜索树在顺序有序或接近有序的情况下,而插入搜索树将退化为单叉树,此时查找的时间复杂度为O(n),效率低…...
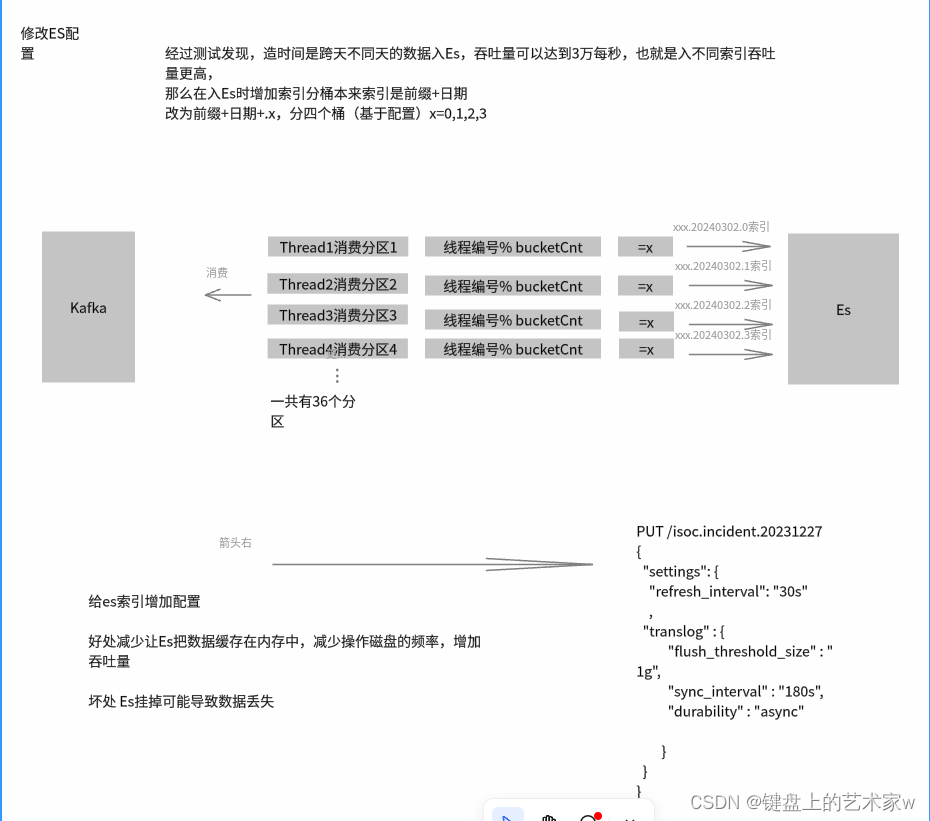
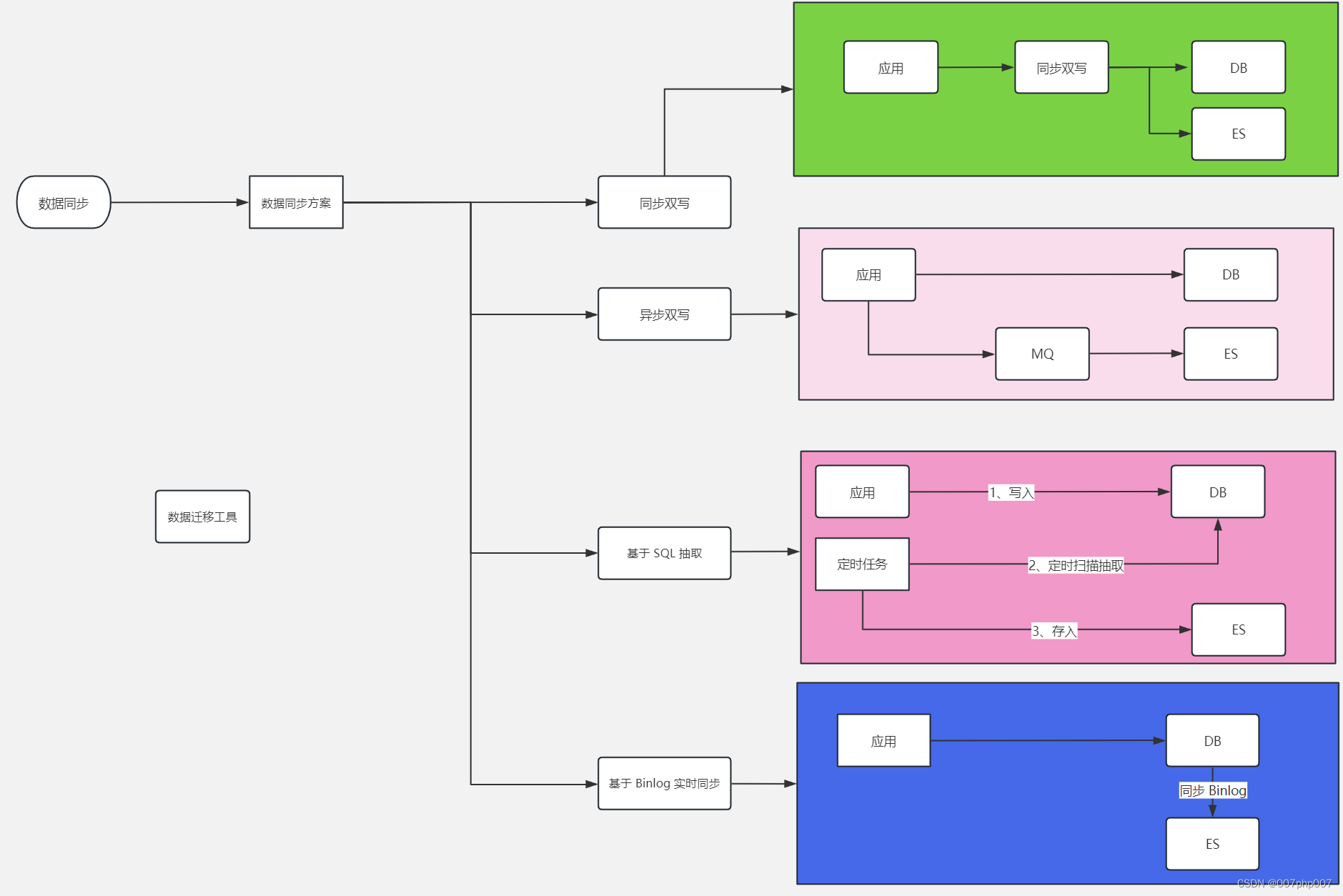
记录一次架构优化处理性能从3千->3万
0.背景 优化Kafka消费入Es,适配600台设备上报数据,吞吐量到达2万每秒 1.环境配置 2.压测工具 3.未优化之前的消费逻辑 4.优化之后的消费流程 5.多线程多ESclient 6.修改ES配置,增加kafka分区,增加线程,提升吞吐量 7.…...

c++二进制位运算使用方法
文章主要内容: C 中的位运算符主要用于对整数类型的数据进行位操作,包括按位与(&)、按位或(|)、按位异或(^)、取反(~)、左移(<<&#…...

TypeScript之JSON点语法调用
场景 当我们想要通过将JSON中的属性名赋值给一个变量,并且通过点语法实现字段调用.常规的String变量保存会出现下述问题,就可以通过String[][]实现动态调用字段. let parentJSON{"name":"liupeng"}let a:String;Object.keys(parentJSON).forEach(key >…...
手撕Java集合之简易版Deque(LinkedList)
在目前,许多互联网公司的面试已经要求能手撕集合源码,集合源码本身算是源码里比较简单的一部分,但是要在面试极短的10来分钟内快速写出一个简易版的源码还是比较麻烦的,很容易出现各种小问题。所以在平时就要注重这方面的联系。 以…...
)
MySQL知识点归纳总结(二)
10、MVCC实现原理? 事务ID(Transaction ID):每个事务在执行时都会被分配一个唯一的事务ID,用于标识该事务的开始时间顺序。事务ID是一个递增的整数,随着每个新事务的开始而递增。 Undo日志(Un…...
vue:实现顶部消息横向滚动通知
前言 系统顶部展示一个横向滚动的消息通知,就是消息内容从右往左一直滚动。 效果如下: 代码 使用 <template><div class"notic-bar"><img :src"notic" class"notice-img" /><div class"noti…...

[笔记] wsl 禁用配置 win系统环境变量+代理
wsl 配置禁用 win系统环境变量 进入 wsl 的 /etc/wsl.conf 目录,增加以下配置: [interop] enabledfalse appendWindowsPathfalse然后退出wsl,并且执行关闭正在运行的 wsl,执行命令 wsl --shutdown 最后重新进入wsl 即可。 参考…...
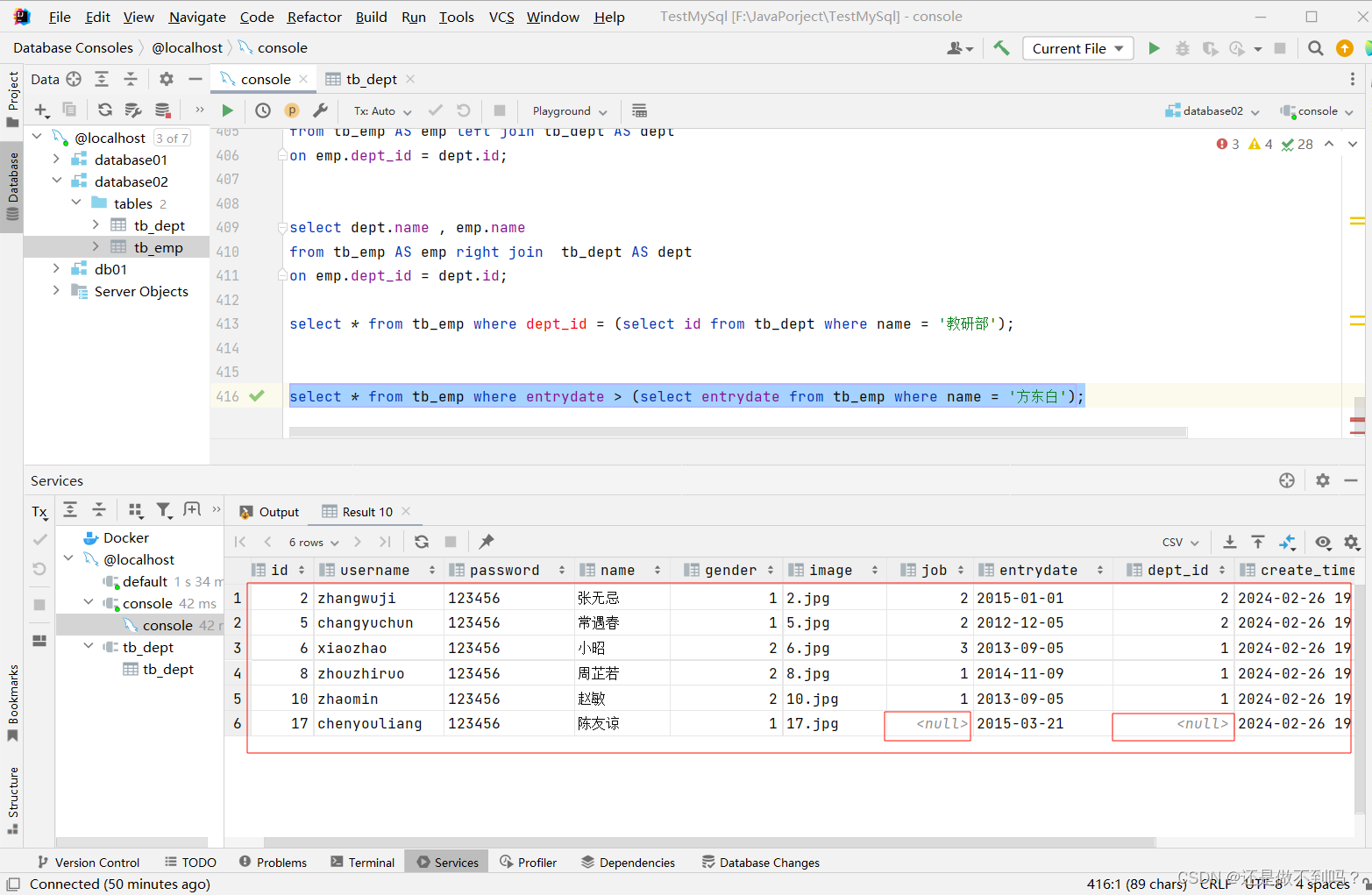
Mysql标量子查询
目录 子查询标量子查询数据准备 子查询 SQL语句中嵌套select语句,称为嵌套查询,又称子查询。 SELECT * FROM t1 WHERE column1 ( SELECT column1 FROM t2 ... );子查询外部的语句可以是insert / update / delete / select 的任何一个&…...
深入了解Java虚拟机(JVM)
Java虚拟机(JVM)是Java程序运行的核心组件,它负责解释执行Java字节码,并在各种平台上执行。JVM的设计使得Java具有跨平台性,开发人员只需编写一次代码,就可以在任何支持Java的系统上运行。我们刚开始学习Ja…...
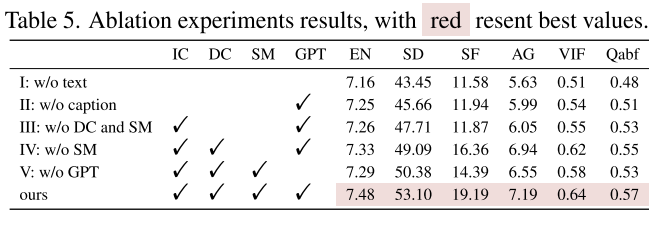
Image Fusion via Vision-Language Model【文献阅读】
阅读目录 文献阅读AbstractIntroduction3. Method3.1. Problem Overview3.2. Fusion via Vision-Language Model 4. Vision-Language Fusion Datasets5. Experiment5.1Infrared and Visible Image Fusion 6. Conclusion个人总结 文献阅读 原文下载:https://arxiv.or…...
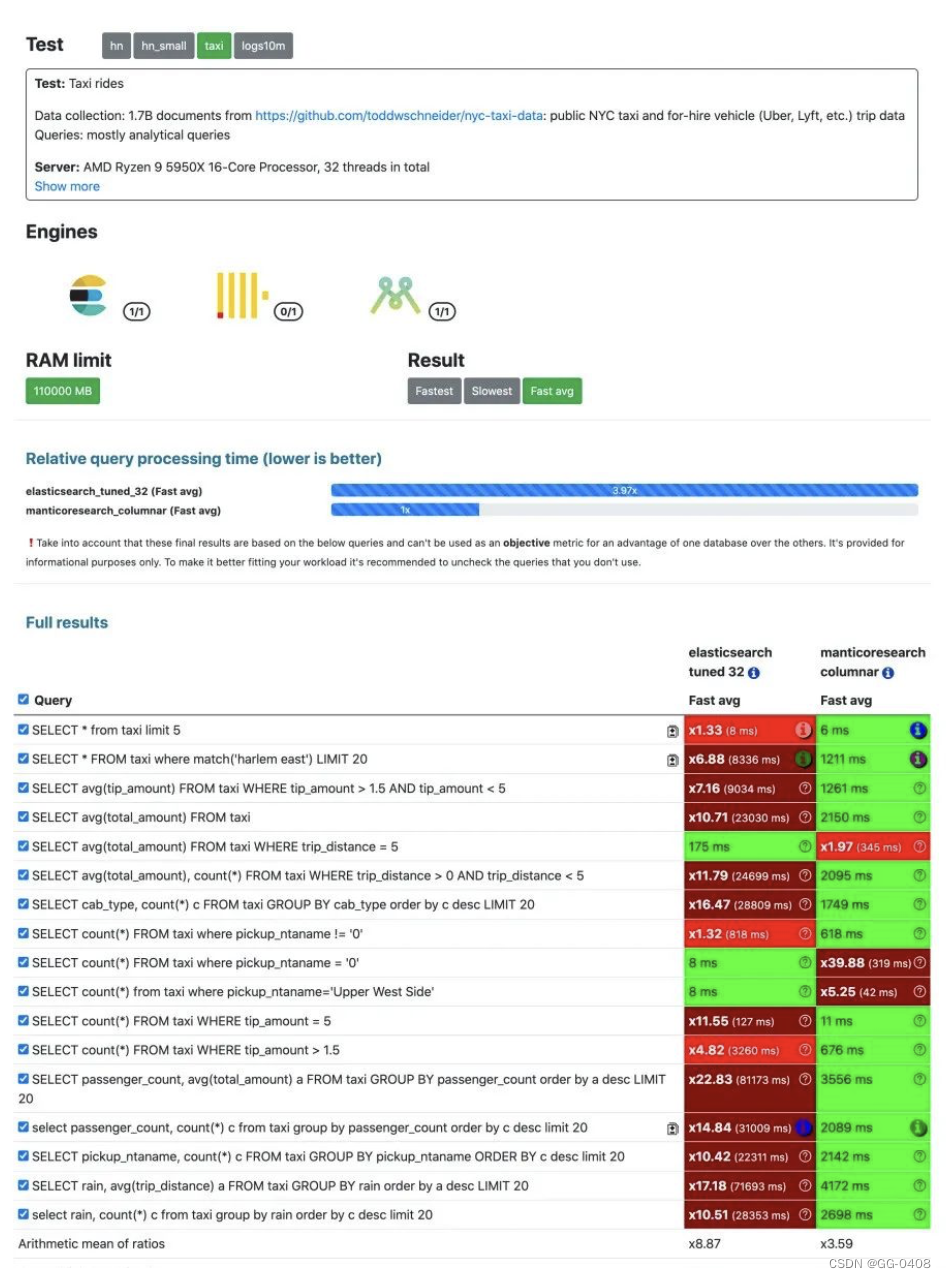
探索Manticore Search:开源全文搜索引擎的强大功能
在当今信息爆炸的时代,数据的快速检索变得至关重要。无论是在电子商务网站、新闻门户还是企业内部文档,高效的搜索引擎都是确保用户满意度和工作效率的关键因素之一。而在搜索引擎领域,Manticore Search 作为一款开源的全文搜索引擎ÿ…...

AI 笔记助手,你的思路整理助手
大家好,今天给大家介绍一款非常实用的 AI 笔记助手——AI Note。这款助手就像是一个贴心的小助手,能帮助我们整理笔记,提高学习和工作效率。 🤖 AI Note 可以智能总结笔记内容,准确标记重点,让我们更快地获…...
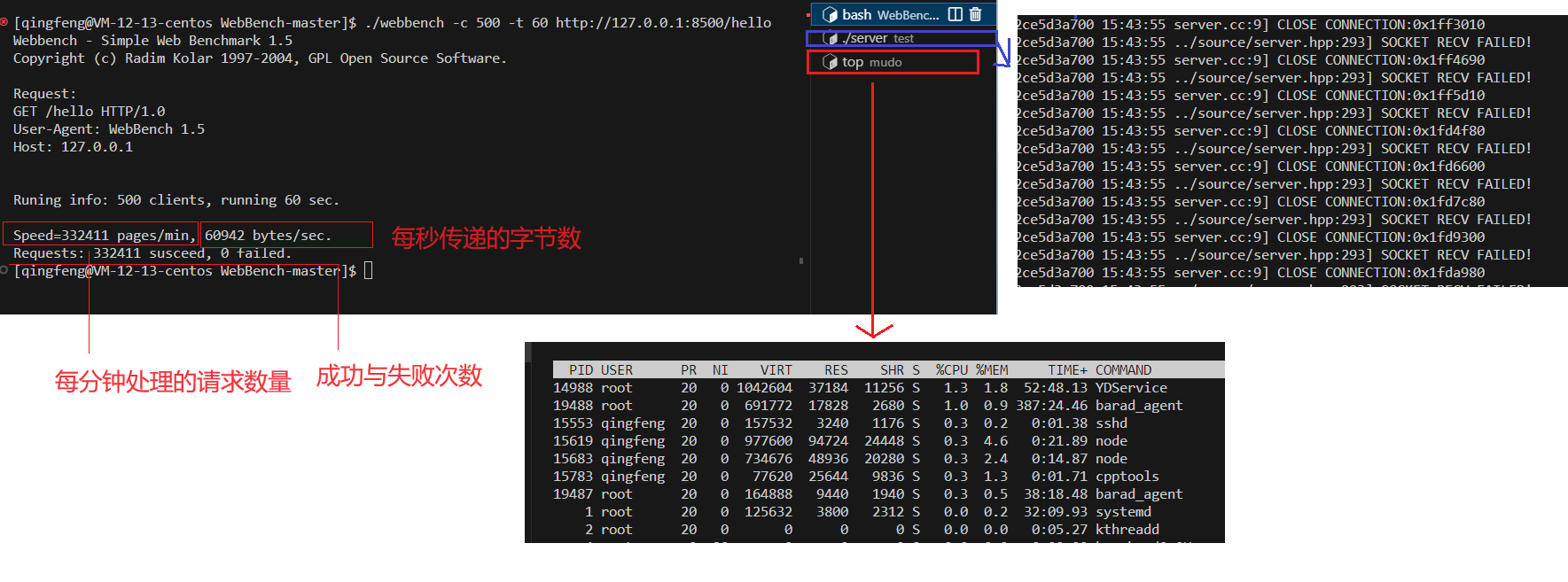
EchoServer回显服务器简单测试
目录 工具介绍 工具使用 测试结果 工具介绍 github的一个开源项目,是一个测压工具 EZLippi/WebBench: Webbench是Radim Kolar在1997年写的一个在linux下使用的非常简单的网站压测工具。它使用fork()模拟多个客户端同时访问我们设定的URL,测试网站在压力下工作的…...
车灯修复UV胶的优缺点有哪些?
车灯修复UV胶的优点如下: 优点: 快速固化:通过紫外光照射,UV胶可以在5-15秒内迅速固化,提高了修复效率。高度透明:固化后透光率高,几乎与原始车灯材料无法区分,修复后车灯外观更加…...
探讨倒排索引Elasticsearch面试与实战:从理论到实践
在当前大数据时代,Elasticsearch(以下简称为ES)作为一种强大的搜索和分析引擎,受到了越来越多企业的青睐。因此,对于工程师来说,掌握ES的面试准备和实战经验成为了必备技能之一。本文将从ES的面试准备和实际…...

网安入门18-XSS(靶场实战)
HTML实体化编码 为了避免 XSS 攻击,会将<>编码为<与>,这些就是 HTML 实体编码。 编码前编码后不可分的空格 < (小于符号)< > (大于符号)> & (与符号)&″ (双引号)"’ (单引号)'© (版权符…...

爬虫的一些小技巧总结
一、在爬虫中,爬取的数据类型如下 1.document:返回的是一个HTML文档 2.png:无损的图片,jpg:压缩后的图片,wbep:有损压缩,比png差,比jpg好 3.avgxml图像编码字符串 4.script:脚本文件,依据一定格式编写的可执行的文…...

LeetCode---386周赛
题目列表 3046. 分割数组 3047. 求交集区域内的最大正方形面积 3048. 标记所有下标的最早秒数 I 3049. 标记所有下标的最早秒数 II 一、分割数组 这题简单的思维题,要想将数组分为两个数组,且分出的两个数组中数字不会重复,很显然一个数…...
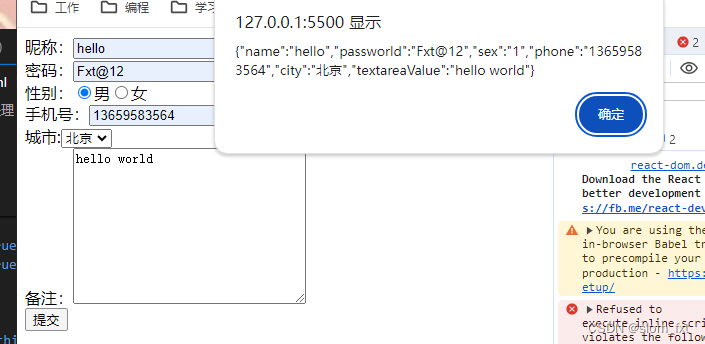
React之数据绑定以及表单处理
一、表单元素 像<input>、<textarea>、<option>这样的表单元素不同于其他元素,因为他们可以通过用户交互发生变化。这些元素提供的界面使响应用户交互的表单数据处理更加容易 交互属性,用户对一下元素交互时通过onChange回调函数来监听…...

IOFILE结构体的介绍与House of orange鸵
认识Pass层级结构 Pass范围从上到下一共分为5个层级: 模块层级:单个.ll或.bc文件 调用图层级:函数调用的关系。 函数层级:单个函数。 基本块层级:单个代码块。例如C语言中{}括起来的最小代码。 指令层级:单…...
|结构体:自定义数据类型与实战)
C 语言从 0 入门(十三)|结构体:自定义数据类型与实战
大家好,我是网域小星球。 前面我们学习了基本数据类型、数组、指针、函数,能够处理数字、字符等简单数据。但在实际开发中,我们经常需要描述一个复杂对象,比如学生、商品、员工、书籍等,它们包含多种不同类型的信息&a…...

超级千问语音设计世界应用案例:快速生成短视频配音与游戏角色语音
超级千问语音设计世界应用案例:快速生成短视频配音与游戏角色语音 1. 引言:当语音合成遇上像素冒险 在内容创作领域,声音设计往往是最容易被忽视却又至关重要的环节。无论是短视频创作者需要快速生成旁白,还是独立游戏开发者需要…...

AI Agent Harness Engineering 监控与日志系统搭建
AI Agent Harness Engineering 监控与日志系统搭建 副标题:从0到1构建覆盖「决策-工具-对话-资源」全链路的企业级可观测性底座 第一部分:引言与基础 (Introduction & Foundation) 1.1 引人注目的标题 核心关键词 AI Agent Harness Engineering、AI Agent监控、Agent…...

Linux路由表中那个神秘的0.0.0.0:默认网关配置全解析
Linux路由表中0.0.0.0的奥秘:从默认网关到高级路由策略 当你第一次在Linux系统的路由表中看到0.0.0.0这个特殊地址时,是否也曾感到困惑?这个看似简单的地址背后,隐藏着网络通信中最基础也最重要的机制之一——默认路由。作为系统管…...

如何批量创建SQL存储过程_使用脚本自动化部署流程
最稳妥的批量建存储过程方法是:SQL Server用sp_executesql逐个执行CREATE OR ALTER PROCEDURE;PostgreSQL用DO块pg_proc校验后EXECUTE;MySQL避免DELIMITER误替换,改用客户端分隔符控制。SQL Server 里用 sp_executesql 动态生成存…...
,业务系统不直接接触私钥)
FISCO BCOS 日常操作使用托管签名服务(如WeBASE-Sign),业务系统不直接接触私钥
实战:如何通过WeBASE-Sign实现私钥托管与安全签名 目录 引言 一、为什么需要签名分离 1.1 传统签名的安全困境 1.2 签名分离的架构优势 1.3 适用场景 二、WeBASE-Sign 签名服务核心原理 2.1 整体架构 2.2 核心接口 2.3 交易流程中的签名位置 三、实战:完整接入流程…...

C++ P1151 子数整数
文章目录一、题目链接二、参考代码一、题目链接 链接: link 二、参考代码 #include <iostream> #include <string> #include <algorithm> #include <math.h> using namespace std;int main() {int num;cin >> num;int key 0;for (int i 1000…...

当PLC遇上滚筒:聊聊洗衣机控制系统的硬核操作
基于S7-200 PLC组态王组态和触摸屏的洗衣机控制系统的设计 熟悉工业电气控制系统的组成,熟悉PLC系统的设计。 全自动洗衣机能够根据衣物的质地、数量及脏污程度 来实现标准洗涤、柔顺洗涤等多功能模式。 各个功能 模式均包括洗涤、漂洗、排水、脱水等过程࿰…...

omniMath:嵌入式轻量级数学表达式求值与单位转换库
1. omniMath 库深度解析:面向嵌入式系统的轻量级数学表达式求值与单位转换引擎1.1 库定位与工程价值omniMath 是一款专为 Arduino 及兼容平台(如 Raspberry Pi Pico、ESP32、STM32duino)设计的嵌入式数学计算库。其核心价值不在于替代浮点协处…...