Launch学习
参考博客:
(1) 史上最全的launch的解析来啦,木有之一欧
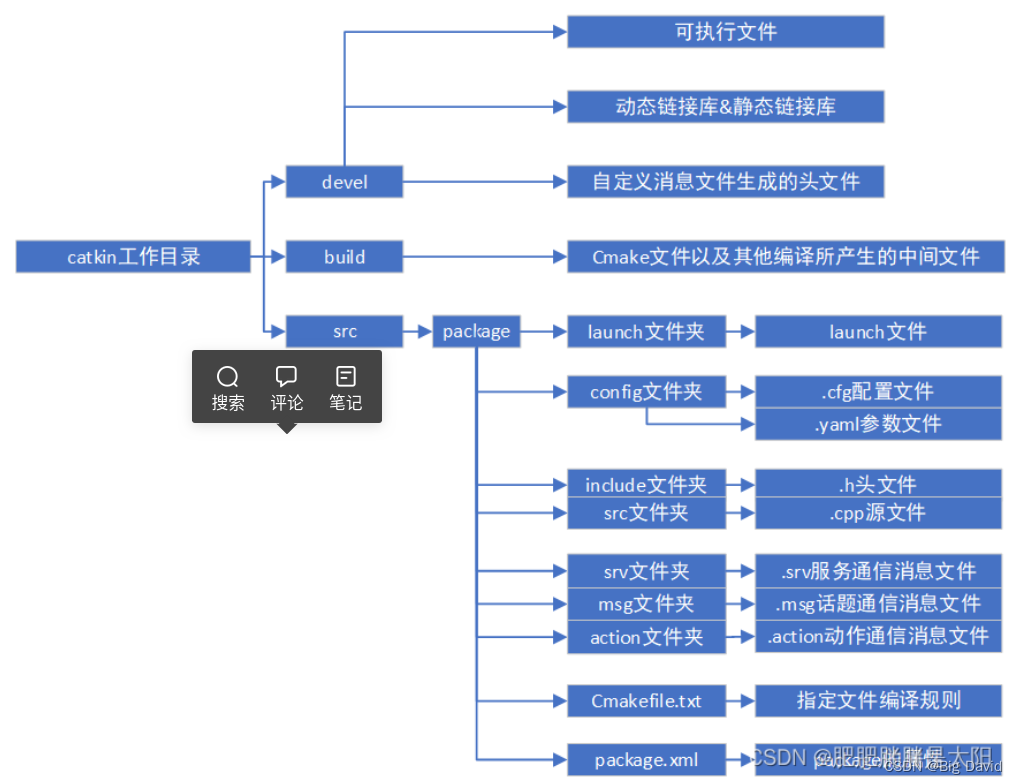
1 ROS工作空间简介
2 元功能包
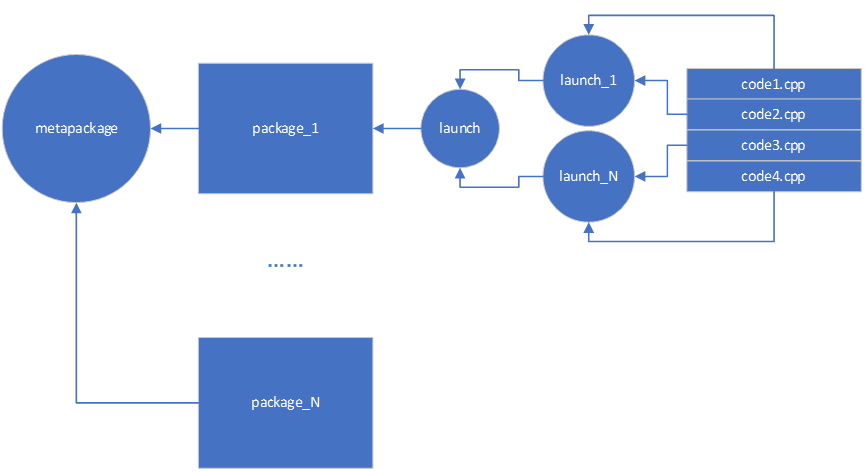
src目录下可以包含多个功能包,假设需要使用机器人导航模块,但是这个模块中包含着地图、定位、路径规划等不同的功能包,它们的逻辑关系如下:

在Linux系统中为了更方便的组织工程项目(这里针对的是项目文件,即功能包),出现了“元功能包”的概念。这个是一个“虚包”,就是这个功能包的src目录下没有源文件,因此自身不会实现专属功能,其功能的实现完全依赖于其他的功能包,起到一个组织功能包的作用。
以导航模块中的元功能包为例:
 navigation功能包为元功能包(metapackage),元功能包中由于没有src目录因此无需添加任何依赖项,因为这个功能包没有自己的专属功能,它的功能是借助其他的功能包的功能来实现的。元功能包有两个文件即可:一个是package.xml文件:用于声明元功能包所依赖的其他功能包;另一个是CMakelist.txt文件:用于指定功能包之间的依赖关系。
navigation功能包为元功能包(metapackage),元功能包中由于没有src目录因此无需添加任何依赖项,因为这个功能包没有自己的专属功能,它的功能是借助其他的功能包的功能来实现的。元功能包有两个文件即可:一个是package.xml文件:用于声明元功能包所依赖的其他功能包;另一个是CMakelist.txt文件:用于指定功能包之间的依赖关系。
CMakelist.txt
cmake_minimum_required(VERSION 3.0.2)
project(navigation)
find_package(catkin REQUIRED)
catkin_metapackage() // 只需添加此条内容即可
package.xml
<exec_depend>amcl</exec_depend>
<exec_depend>base_local_planner</exec_depend>
<exec_depend>carrot_planner</exec_depend>
<exec_depend>clear_costmap_recovery</exec_depend>
<exec_depend>costmap_2d</exec_depend>
<exec_depend>dwa_local_planner</exec_depend>
<exec_depend>fake_localization</exec_depend>
<exec_depend>global_planner</exec_depend>
<exec_depend>map_server</exec_depend>
<exec_depend>move_base</exec_depend>
<exec_depend>move_base_msgs</exec_depend>
<exec_depend>move_slow_and_clear</exec_depend>
<exec_depend>navfn</exec_depend>
<exec_depend>nav_core</exec_depend>
<exec_depend>rotate_recovery</exec_depend>
<exec_depend>voxel_grid</exec_depend> <export> <metapackage/> // 表征:这个功能包为元功能包
</export>
3 Launch文件
Launch文件:源文件的组织者
① 节点启动标签
<launch> <node pkg = "turtlesim" type = "turtlesim_node" name = "my_node"/> <node pkg = "turtlesim" type = "turtle_teleop_key" name = "my_key"/>
</launch>
Tip:因为ROS中采用多线程,因此节点的运行不会按照节点在launch中排列顺序进行。
pkg:功能包的名称
type:节点本来的名称,这个名称和节点所在.cpp源文件的文件名一致
name:节点重映射的名称,相当于在系统中给节点所在源文件改了个名字
launch标签有一个子级标签deprecated,用于文本说明:
<launch deprecated="this vision is out-of-date!">
</launch>
如果认为给很多节点取名太麻烦,可以使用name=”$(anon node_name)”标签在节点node_name名称之后加一些随机数,使得该节点名称在整个catkin编译项目中唯一:
<launch deprecated="this vision is out-of-date!"> <!-- the topic of turtlesim_node is /turtle1/cmd_vel --> <node pkg="turtlesim" type="turtlesim_node" name="$(anon my_node)"/> <!-- the topic of turtle_teleop_key is /turtle1/cmd_vel --> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"/>
</launch>
意外关闭后自动启动的子级标签
respawn = true|false 表示:如果节点意外关闭是否重新启动
<launch> <node pkg="turtlesim" type="turtlesim_node" name="my_node" respawn="true"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" respawn="true"/>
</launch>
节点延迟启动的子级标签,一般结合节点重启动是使能标签respawn(如果节点异常退出运行,那么该节点会被重新启动)一起使用
<launch> <node pkg="turtlesim" type="turtlesim_node" name="my_node" respawn="true" respawn_delay="10"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" respawn="true" respawn_delay="10"/>
</launch>
如果XXX节点结束运行(XXX节点被杀死),则所有节点都停止运行
<launch> <node pkg="turtlesim" type="turtlesim_node" name="my_node" required="true"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" />
</launch>
给节点名称添加前缀(给节点添加命名空间)的子级标签
<launch> <node pkg="turtlesim" type="turtlesim_node" name="my_node" ns="hello"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key"/>
</launch>
② 参数设置标签
设置global全局参数
<launch><param name="var" type="int" value="10"/>
</launch>
结合标签设置带有命名空间的私有参数
<launch><node pkg="turtlesim" type="turtlesim_node" name="my_node"/><node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"><param name="var1" type="int" value="20"/></node>
</launch>
③ 参数打包输入输出删除的标签
从.yaml文件中读取参数:
<launch><rosparam command="load" file="$(find test01)/launch/params.yaml"/><node pkg="turtlesim" type="turtlesim_node" name="my_node"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"/> <param name="var" type="int" value="10"/>
</launch>
将.yaml参数文件中的参数导入参数服务器时,我们还可以给这些参数添加namespace命名空间:
<launch> <node pkg="turtlesim" type="turtlesim_node" name="my_node"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"/> <param name="var" type="int" value="10"/> <rosparam command="load" file="$(find test01)/launch/params.yaml" ns="hello"/>
</launch>
将参数打包输入进.yaml文件中,这样做啥变量都没导进去:
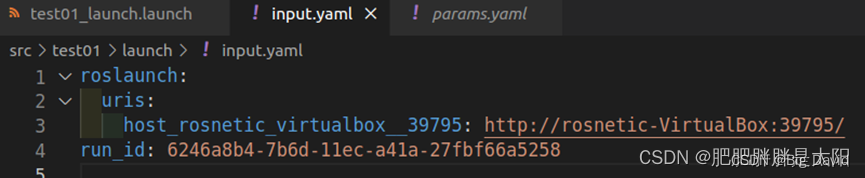
<launch> <rosparam command="dump" file="$(find test01)/launch/input.yaml"/> <node pkg="turtlesim" type="turtlesim_node" name="my_node"/> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"/> <param name="var" type="int" value="10"/>
</launch>
我们要想导入参数必须另建一个.launch文件,在使用上述launch文件启动完所有节点之后,在另一个launch文件中执行该功能包参数的导出操作:
<launch><rosparam command="dump" file="$(find test01)/launch/input.yaml" />
</launch>
<launch> <rosparam command="dump" file="$(find test01)/launch/input.yaml"/> <rosparam command="delete" param="/hello/n1"/>
</launch>
④ 参数统一管理的标签
<launch> <arg name="car_width" default="[1,2,3,4]" doc="the width of car"/> <rosparam param="a_list">$(arg car_width)</rosparam> <rosparam> Name: a: 9 b: "hello" c: $(arg car_width) </rosparam>
</launch>
⑤ 改topic名称的标签
<launch> <!-- the topic of turtlesim_node is /turtle1/cmd_vel --> <node pkg="turtlesim" type="turtlesim_node" name="my_node"/> <remap from="/turtle1/cmd_vel" to="new_topic"/>
</launch>
⑥ 节点组织标签
就是给被<group>…</group>包含的所有参数、节点的属性加上了namespace
<launch deprecated="this vision is out-of-date!"> <group ns="family"> <!-- the topic of turtlesim_node is /turtle1/cmd_vel --> <node pkg="turtlesim" type="turtlesim_node" name="my_node"/> <!-- the topic of turtle_teleop_key is /turtle1/cmd_vel --> <node pkg="turtlesim" type="turtle_teleop_key" name="my_key" output="screen"/> <rosparam command="load" file="$(find test01)/launch/params.yaml" ns="hello"/> <arg name="car_width" default="[1,2,3,4]" doc="the width of car"/> <rosparam param="a_list" value="$(arg car_width)"/> <rosparam> Name: a: 9 b: "hello" c: [1,2,3,4] </rosparam> <param name="var" type="int" value="$(arg car_width)"/> </group>
</launch>
⑦ 启动其他launch文件的标签
<launch> <include file="$(find test01)/launch/test01_launch.launch"> <arg name="car_width" default="10"/> </include>
</launch>
4 功能包/源文件/launch文件组织工具
 文件组织形式如下所示:
文件组织形式如下所示:
5 功能包绝对路径替换标签
标签格式:$(find package_name)
使用示例:
<launch> <include file="$(find tf2_turtle)/launch/setupGUI.launch"/>
</launch>
6 工作空间下绝对路径替换标签
下面是test1.launch调用setupGUI.launch文件的代码,并且两个launch文件在一个文件夹之中:
<launch> <include file="$(dirname)/setupGUI.launch"/>
</launch>
$(dirname)代表“test1.launch文件所在工作空间的绝对地址
7 Launch文件
列出几个Launch文件自测一下学习成果
<?xml version="1.0"?>
<launch><!-- 加载车模型 --><include file="$(find vehicle_description)/launch/estima_black.launch" /><!-- --><node pkg="car_simulation" type="car_model_node" name="car_simulation" output="screen" />
</launch>
<launch><include file="$(find global_routing)/launch/global_routing.launch"/><!-- 车辆仿真 --><include file="$(find car_simulation)/launch/car_simulation.launch" /><!-- rviz --><node pkg="rviz" type="rviz" name="rviz" args="-d $(find global_routing)/config/planning_demo.rviz"/>
</launch>
<?xml version="1.0"?>
<launch><!-- 其他launch文件传入的参数 --><arg name="is_planner"/><arg name="is_lateral_optimization"/><arg name="is_change_lane"/><arg name="is_carla_simulation"/><arg name="ego_vehicle_name"/><arg name="is_parking"/><arg name="is_goal"/><!-- 模拟动态障碍物的加载文件,这些都是录好的轨迹点,播放这个文件就可以实现障碍物移动 --><param name="obstacle_test_path" value="$(find dynamic_routing)/obstacle_files"/><!-- 加载存储的其他参考线数据 --><param name="referenceline_path" value="$(find dynamic_routing)/other_referenceline_files"/><!-- yaml文件 --><param name="yaml_path" value="$(find dynamic_routing)/config"/><!-- 规划算法选择 --><param name="use_what_planner" value="$(arg is_planner)"/><!-- 变道决策是否开启 --><param name="change_lane" value="$(arg is_change_lane)"/><!-- 是否使用二次规划,选择了lattice规划,选择这个才有效果 --><param name="use_lateral_optimization" value="$(arg is_lateral_optimization)"/><!-- 是否选择carla联合仿真 --><param name="carla_simulation" value="$(arg is_carla_simulation)"/><!-- role_name --><param name="role_name" value="$(arg ego_vehicle_name)"/><!-- carla 停车场景 --><param name="parking_mode" value="$(arg is_parking)"/><!-- 在frenet规划下的参数设置,lattice规划不用这些 --><!-- COLLISION_CHECK_THRESHOLD 距离障碍物的最短距离 --><param name="COLLISION_CHECK_THRESHOLD" type="double" value="2" /><!-- 调整轨迹的长度 --><param name="MaxT" type="double" value="11" /><param name="MinT" type="double" value="9" /><!-- 判断与终点的停车距离阈值 --><param name="goal_distanse" type="double" value="$(arg is_goal)"/><!-- 打开 Hybrid_a_star 的测试图 --><!-- mapserver提供了一个ROS节点,该节点通过一个ROS Service来提供地图数据 --><node name="map_server" pkg="map_server" type="map_server" args="$(find dynamic_routing)/maps/map.yaml" ><param name="frame_id" value="map" /></node><!--Open palnner的launch参数,顺便加载dynamic节点 --><include file="$(find dynamic_routing)/launch/op_common_params.launch" /><!-- DWA --><arg name="dwa_params" default="$(find dynamic_routing)/config/dwa_params.yaml"/><rosparam command="load" file="$(arg dwa_params)"/>
</launch>
<?xml version="1.0"?>
<launch><!-- 是否使用carla联合仿真 --><arg name="carla" default="false"/> <arg name="ego_vehicle_name" default="ego_vehicle"/> <param name="carla_simulation" value="$(arg carla)"/><param name="role_name" value="$(arg ego_vehicle_name)"/><!-- 不能改这里的参数 --><arg name="parking" default="false"/><param name="parking_mode" value="$(arg parking)"/><!-- ros单独仿真下的controller,carla不适用: 1 stanley 2 lqr 3 pure_pursuit4 pid 5 mpc --><arg name="control" value="2"/> <param name="use_what_controller" value="$(arg control)"/><!-- planner: 1是纯frenet规划2是lattice规划3是em_palnner规划4是混合A*规划5是op_planner规划6是DWA规划7是Teb规划8是simple_em(EM的简化版本,待更新)--><arg name="planner" value="7"/> <param name="use_what_planner" value="$(arg planner)"/><!-- 是否使用二次规划,选择了lattice规划,选择这个才有效果 --><!-- false:lattice 采样规划,true:lattice 二次规划 --><arg name="use_lateral_optimization" default="false"/> <!-- 是否开启变道决策,变道选择的是Lattce采样规划,其他方法不使用 --><arg name="change_lane" default="false"/> <!-- 参考线平滑的方式选择: true:CosThetaSmoother false:FemPosSmooth--><arg name="which_smoother" default="false"/> <param name="which_smoothers" value="$(arg which_smoother)"/><!-- 判断与终点的停车距离阈值 --><arg name="goal_dis" value="0.5"/> <param name="goal_distanse" type="double" value="$(arg goal_dis)"/><!-- 局部规划 --><include file="$(find dynamic_routing)/launch/dynamic_routing.launch" ><arg name="is_planner" value="$(arg planner)" /><arg name="is_lateral_optimization" value="$(arg use_lateral_optimization)" /><arg name="is_change_lane" value="$(arg change_lane)" /><arg name="is_carla_simulation" value="$(arg carla)" /><arg name="ego_vehicle_name" value="$(arg ego_vehicle_name)" /><arg name="is_parking" value="$(arg parking)"/><arg name="is_goal" value="$(arg goal_dis)"/></include><!-- carla联合仿真下的控制方法和参数 --><!-- LQR_dynamics LQR_kinematics Stanley PurePursuit --><param name="control_method" value='LQR_kinematics'/> <!-- "PurePursuit"增益系数 --><param name="k_pure" type="double" value="0.3" /> <!-- "Stanley"增益系数 --><param name="k_cte" type="double" value="100" /> <param name="kp" value="0.5" /><param name="ki" type="double" value="0.02" /><param name="kd" type="double" value="0.05" /><!-- LQR Q R矩阵参数 --><param name="Q_ed" type="double" value="20.0" /><param name="Q_ed_dot" type="double" value="1.0" /><param name="Q_ephi" type="double" value="10.0" /><param name="Q_ephi_dot" type="double" value="1.0" /><param name="R_value" type="double" value="40.0" /><!-- --><param name="Q_ex_k" type="double" value="3.0" /><param name="Q_ed_k" type="double" value="3.0" /><param name="Q_ephi_k" type="double" value="1.5" /><param name="R_value_k" type="double" value="4.0" /><!-- 全局规划 --><node pkg="global_routing" type="global_routing_node" name="global_routing" output="screen" /></launch>
相关文章:
Launch学习
参考博客: (1) 史上最全的launch的解析来啦,木有之一欧 1 ROS工作空间简介 2 元功能包 src目录下可以包含多个功能包,假设需要使用机器人导航模块,但是这个模块中包含着地图、定位、路径规划等不同的功能包,它们的逻…...
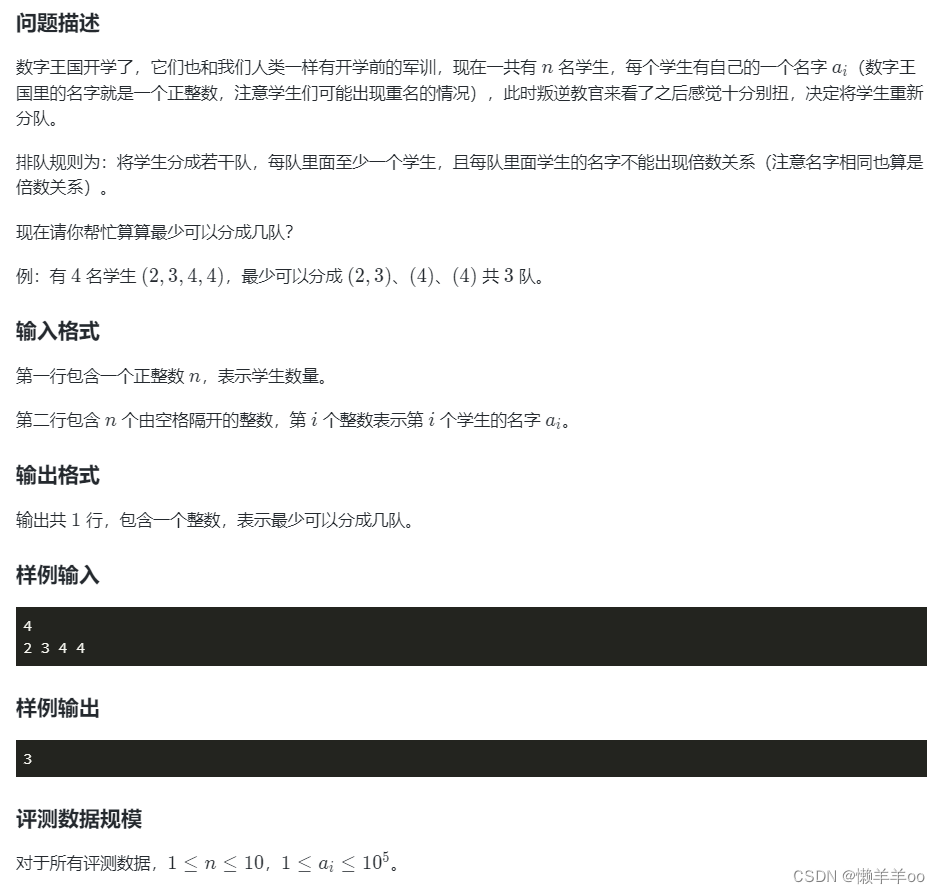
蓝桥OJ 2942数字王国之军训排队 DFS剪枝
蓝桥OJ 2942数字王国之军训排队 #include<bits/stdc.h> using namespace std;const int N 15;//最多10队 int a[N], n; vector<int>v[N];//二维数组 v[i]记录队伍i中所有人的编号bool dfs(int cnt, int dep) {if (dep n1){//判断合法性for (int i 1; i < n; …...

SSL证书
SSL证书(Secure Sockets Layer证书)是一种网络安全协议,用于在互联网上建立加密链接,确保数据在从用户浏览器到服务器之间传输的过程中保持私密性和完整性。尽管现在实际上已经被TLS(Transport Layer Security…...
【C++】string 类 ( 上)
标准库中的string类 注意: 1. string是表示字符串的字符串类 2. 该类的接口与常规容器的接口基本相同,再添加了一些专门用来操作string的常规操作。 比特就业课 3. string在底层实际是:basic_string模板类的别名,typedef basi…...
解读)
《中华人民共和国消防法》(2021年修订版)解读
单选题(共7题,每题5分) 1、举办大型群众性活动,承办人应当依法向()申请安全许可。 正确答案:B、公安机关 2、违反消防安全规定进入生产、储存易燃易爆危险品场所的,情节严重的要处…...
vue+element模仿实现云码自动验证码识别平台官网
一、项目介绍 项目使用传统vue项目结构实现,前端采用element实现。 element官网:Element - The worlds most popular Vue UI framework 云码官网地址:云码-自动验证码识别平台_验证码识别API接口_免费验证码软件 项目截图,支持…...

蓝桥杯练习系统(算法训练)ALGO-992 士兵杀敌(二)
资源限制 内存限制:256.0MB C/C时间限制:1.0s Java时间限制:3.0s Python时间限制:5.0s 问题描述 南将军手下有N个士兵,分别编号1到N,这些士兵的杀敌数都是已知的。 小工是南将军手下的军师&…...

Pycharm下如何生成exe软件
第一步 下载pyinstaller pip install pyinstaller 对pyinstaller第二步 使用pyinstaller cmd切换到项目目录执行命令:pyinstaller --add-data “./templates;templates” 入口文件名.py...
KubeSphere平台安装系列之三【Linux多节点部署KubeSphere】(3/3)
**《KubeSphere平台安装系列》** 【Kubernetes上安装KubeSphere(亲测–实操完整版)】(1/3) 【Linux单节点部署KubeSphere】(2/3) 【Linux多节点部署KubeSphere】(3/3) **《KubeS…...

YOLOv9独家改进|动态蛇形卷积Dynamic Snake Convolution与空间和通道重建卷积SCConv与RepNCSPELAN4融合
专栏介绍:YOLOv9改进系列 | 包含深度学习最新创新,主力高效涨点!!! 一、改进点介绍 Dynamic Snake Convolution是一种针对细长微弱的局部结构特征与复杂多变的全局形态特征设计的卷积模块。 SCConv是一种即插即用的空间…...
XSS初级漏洞靶场
一、环境的搭建 可以在githb上找靶机包,使用小皮面板搭建在自己本机 与此文章类似(放在www目录下) 二、XSS漏洞简介 1、什么是xss漏洞 当用户访问被xss注入的网页,xss代码就会被提取出来。用户浏览器就会解析这段xss代码&…...
k8s pv与pvc理解与实践
参考文章: https://blog.csdn.net/qq_41337034/article/details/117220475 一、 pv/pvc简述 Pv是指PersistentVolume,中文含义是持久化存储卷是对底层的共享存储的一种抽象,Pv由管理员进行配置和创建,只要包含存储能力ÿ…...
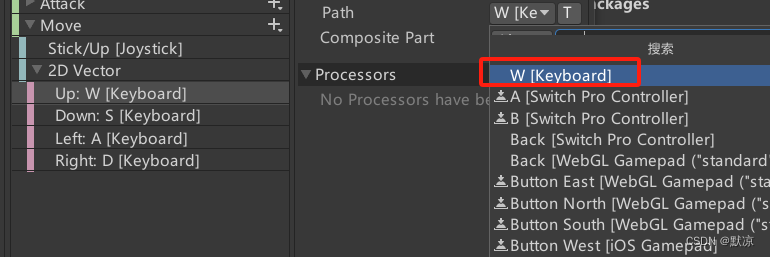
Unity游戏输入系统(新版+旧版)
使用新版还是旧版 旧版 using System.Collections; using System.Collections.Generic; using UnityEngine;public class c5 : MonoBehaviour {void Start(){}void Update(){// 注意要在游戏中 点鼠标键盘进行测试// 鼠标// 0左键 1右键 2滚轮if (Input.GetMouseButtonDown(0)…...

区块链媒体:链游媒体宣发渠道9个方法分享-华媒舍
在当今的游戏市场中,要想让自己开发的游戏脱颖而出,宣传策略的选择也至关重要。链游媒体是一种有效的宣发渠道,通过它们可以向广大玩家推广游戏并提高知名度。下面介绍9个链游媒体宣发渠道,帮助你的游戏走向成功。 1. 游戏公众号 …...
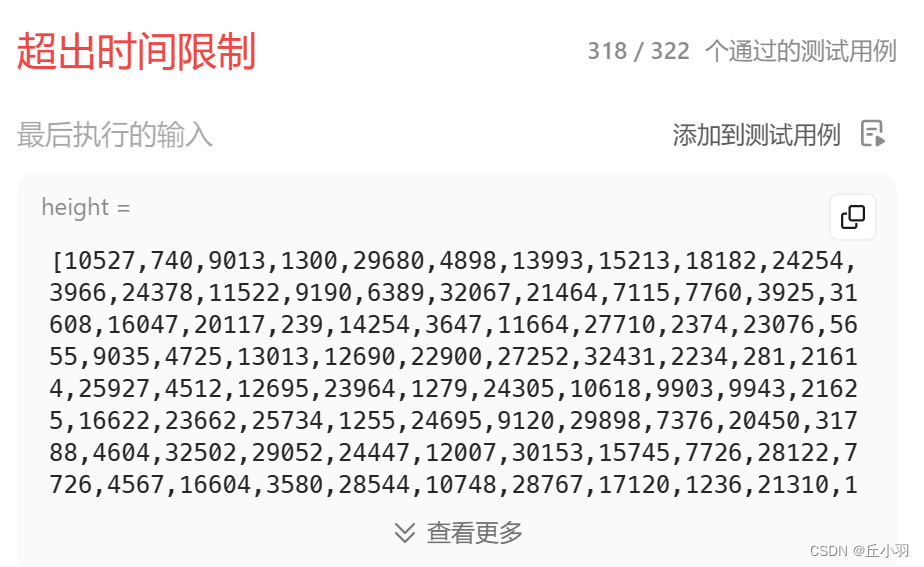
LeetCode--42
42. 接雨水 给定 n 个非负整数表示每个宽度为 1 的柱子的高度图,计算按此排列的柱子,下雨之后能接多少雨水。 示例 1: 输入:height [0,1,0,2,1,0,1,3,2,1,2,1] 输出:6 解释:上面是由数组 [0,1,0,2,1,0,1,…...
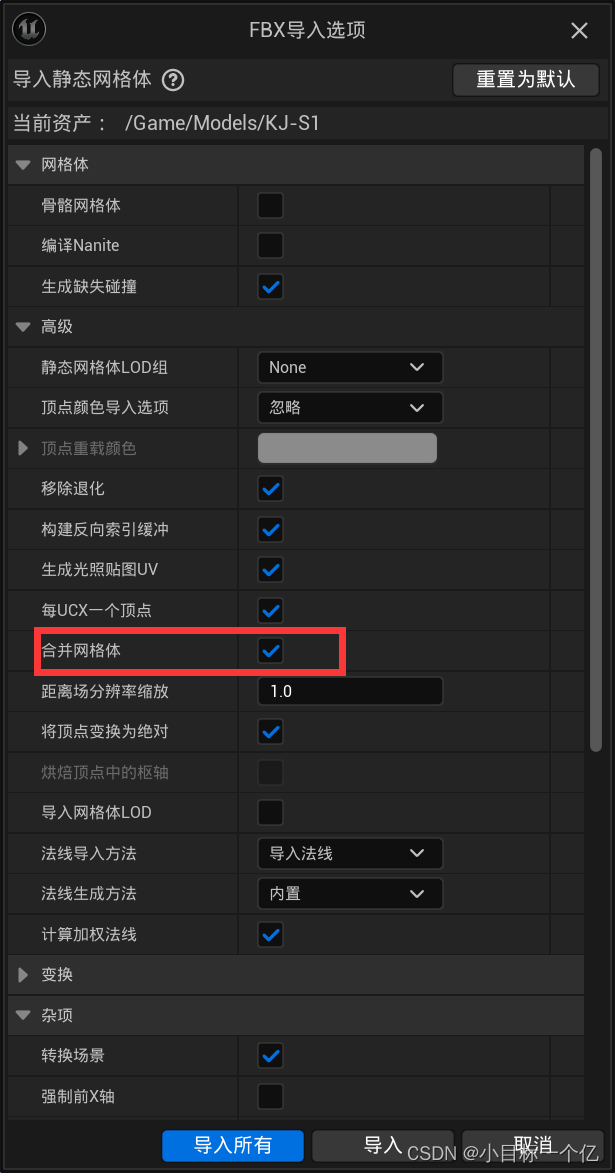
【解决】虚幻导入FBX模型不是一个整体
问题: 现在有一个汽车的fbx模型,导入虚幻引擎,导入后变成了很多汽车零件模型。 解决: 把“合并网格体”勾选上,解决问题。...

第四十八回 解珍解宝双越狱 孙立孙新大劫牢-Python模块和包概念与使用
吴用对宋江说,有个人,他是石勇的关系,与祝家庄的峦廷玉关系好,还是杨林、邓飞的老相识,他有一计.... 原来在宋江攻打祝家庄的时间段,山东海边登州也发生了一件事。登州山下有一家猎户,弟兄两个…...

【Spring连载】使用Spring Data访问 MongoDB----对象映射之属性转换器
【Spring连载】使用Spring Data访问 MongoDB----对象映射之属性转换器 一、声明式值转换器二、编程式值转换器注册三、MongoCustomConversions配置 虽然基于类型的转换已经提供了影响目标存储中某些类型的转换和表示的方法,但当仅考虑特定类型的某些值或属性进行转换…...

【axiox】前后端接口通讯数据交互
重要全局配置: axios.create(); 设置axios请求的公共配置信息。 service.interceptors.request.use((config)>{}) 请求拦截器 service.interceptors.response.use((res)>{},(err)>{}) 响应拦截器 const source axios.CancelToken.source(); 用…...
《Linux C编程实战》笔记:共享内存
共享内存是分配一块能被其他进程访问的内存。每个共享内存段在内核中维护一个内部数据结构shmid_ds(和消息队列、信号量一样),该结构定义在头文件linux/shm.h中,这是我从源码里抄的 #include<linux/shm.h> struct shmid_ds {struct ipc_perm shm_perm; /* 操…...

2026中大型组织人事管理痛点剖析及数字化解决方案,有没有值得推荐的人事管理软件?
在数字化转型深化的当下,中大型组织(集团企业、多业态公司等)因组织架构复杂、人员规模庞大、业务场景多元,人事管理面临诸多瓶颈,严重制约组织效能提升与人才战略落地。本文聚焦中大型组织人事管理核心痛点࿰…...

5分钟快速上手:用ncmdump解锁网易云音乐NCM格式,实现跨平台自由播放
5分钟快速上手:用ncmdump解锁网易云音乐NCM格式,实现跨平台自由播放 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为网易云音乐下载的NCM格式文件无法在车载音响、手机自带播放器或其他音乐软件中播放而…...

AI大模型岗位全解析:小白也能入行的收藏指南!
本文全面解析AI大模型行业岗位,涵盖核心技术岗(高薪、高壁垒)、工程与平台岗(落地关键、需求大)、产品与应用岗(懂业务、好入行)以及入门与服务岗(零基础友好)。详细介绍…...

三星固件下载神器:Bifrost跨平台解决方案完全指南
三星固件下载神器:Bifrost跨平台解决方案完全指南 【免费下载链接】SamloaderKotlin 项目地址: https://gitcode.com/gh_mirrors/sa/SamloaderKotlin 三星固件下载神器Bifrost(SamloaderKotlin)是一款免费开源的三星官方固件下载工具…...

基于MATLAB的16QAM系统仿真:从误码率分析到星座图可视化
1. 16QAM调制原理与MATLAB实现 16QAM(16进制正交幅度调制)是现代通信系统中常用的高效调制技术。我第一次接触这个概念是在研究生阶段的数字通信课上,当时对着星座图琢磨了半天才理解它的精妙之处。简单来说,它就像在一个二维平面…...

js内建对象
JavaScript 对象 在 JavaScript中,几乎所有的事物都是对象、在 JavaScript 中,对象是非常重要的,当你理解了对象,就可以了解 JavaScript 。 一维数组: 第一种:使用new关键字和Array()构造函数 a、 va…...

像素史诗·智识终端Web应用开发全栈指南:从后端API到前端交互
像素史诗智识终端Web应用开发全栈指南:从后端API到前端交互 1. 项目概述与核心价值 在当今AI技术快速落地的背景下,如何将强大的AI能力整合到Web应用中成为开发者关注的重点。本文将完整演示如何以像素史诗智识终端为AI引擎,开发一个具备聊…...

现在好用的 AI 大模型,到底有哪些?怎么收费?一文整理清楚
这两年,大模型最大的变化,不是“谁最强”。 而是:已经没有一个模型,能把所有事都做成第一。 你写代码,可能会先想到 Claude。你做日常办公和综合问答,很多人会选 ChatGPT。你要多模态、生态和搜索联动&…...

MySQL优化全攻略:索引、SQL与分库分表的最佳实践第
一、各自优势和对比 这是检索出来的数据,据说是根据第三方评测与企业数据,三款产品在代码生成质量上各有侧重: 产品 语言优势 场景亮点 核心差异 百度 Comate C核心代码质量第一;Python首生成率达92.3% SQL生成准确率提升35%&…...

Agent-Sandbox UI 上线,来看看有哪些的功能是你经常使用的?汉
一、简化查询 1. 先看一下查询的例子 /// /// 账户获取服务 /// /// /// public class AccountGetService(AccountTable table, IShadowBuilder builder) {private readonly SqlSource _source new(builder.DataSource);private readonly IParamQuery _accountQuery build…...