Orbit 使用指南 02 | 在场景中生成原始对象| Isaac Sim | Omniverse
如是我闻: Orbit使用指南02将
- 深入探讨如何使用Python代码在Orbit中向场景生成各种对象(或原始对象)。
- 一起探索如何生成地面平面、灯光、基本图形形状以及来自USD文件的网格。
- 前置知识:如何生成空白场景,Orbit 使用指南 01
指南02对应于orbit/source/standalone/tutorials/00_sim目录下的spawn_prims.py脚本。让我们先瞅一瞅这个Python脚本:
# Copyright (c) 2022-2024, The ORBIT Project Developers.
# All rights reserved.
#
# SPDX-License-Identifier: BSD-3-Clause"""This script demonstrates how to spawn prims into the scene... code-block:: bash# Usage./orbit.sh -p source/standalone/tutorials/00_sim/spawn_prims.py"""from __future__ import annotations"""Launch Isaac Sim Simulator first."""
import argparsefrom omni.isaac.orbit.app import AppLauncher# create argparser
parser = argparse.ArgumentParser(description="Tutorial on spawning prims into the scene.")
# append AppLauncher cli args
AppLauncher.add_app_launcher_args(parser)
# parse the arguments
args_cli = parser.parse_args()
# launch omniverse app
app_launcher = AppLauncher(args_cli)
simulation_app = app_launcher.app"""Rest everything follows."""import tracebackimport carb
import omni.isaac.core.utils.prims as prim_utilsimport omni.isaac.orbit.sim as sim_utils
from omni.isaac.orbit.utils.assets import ISAAC_NUCLEUS_DIRdef design_scene():"""Designs the scene by spawning ground plane, light, objects and meshes from usd files."""# Ground-planecfg_ground = sim_utils.GroundPlaneCfg()cfg_ground.func("/World/defaultGroundPlane", cfg_ground)# spawn distant lightcfg_light_distant = sim_utils.DistantLightCfg(intensity=3000.0,color=(0.75, 0.75, 0.75),)cfg_light_distant.func("/World/lightDistant", cfg_light_distant, translation=(1, 0, 10))# create a new xform prim for all objects to be spawned underprim_utils.create_prim("/World/Objects", "Xform")# spawn a red conecfg_cone = sim_utils.ConeCfg(radius=0.15,height=0.5,visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.0, 0.0)),)cfg_cone.func("/World/Objects/Cone1", cfg_cone, translation=(-1.0, 1.0, 1.0))cfg_cone.func("/World/Objects/Cone2", cfg_cone, translation=(-1.0, -1.0, 1.0))# spawn a green cone with colliders and rigid bodycfg_cone_rigid = sim_utils.ConeCfg(radius=0.15,height=0.5,rigid_props=sim_utils.RigidBodyPropertiesCfg(),mass_props=sim_utils.MassPropertiesCfg(mass=1.0),collision_props=sim_utils.CollisionPropertiesCfg(),visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 0.0)),)cfg_cone_rigid.func("/World/Objects/ConeRigid", cfg_cone_rigid, translation=(0.0, 0.0, 2.0), orientation=(0.5, 0.0, 0.5, 0.0))# spawn a usd file of a table into the scenecfg = sim_utils.UsdFileCfg(usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Mounts/SeattleLabTable/table_instanceable.usd")cfg.func("/World/Objects/Table", cfg, translation=(0.0, 0.0, 1.05))def main():"""Main function."""# Initialize the simulation contextsim_cfg = sim_utils.SimulationCfg(dt=0.01, substeps=1)sim = sim_utils.SimulationContext(sim_cfg)# Set main camerasim.set_camera_view([2.0, 0.0, 2.5], [-0.5, 0.0, 0.5])# Design scene by adding assets to itdesign_scene()# Play the simulatorsim.reset()# Now we are ready!print("[INFO]: Setup complete...")# Simulate physicswhile simulation_app.is_running():# perform stepsim.step()if __name__ == "__main__":try:# run the main executionmain()except Exception as err:carb.log_error(err)carb.log_error(traceback.format_exc())raisefinally:# close sim appsimulation_app.close()
代码解析
Omniverse中的场景设计始终绕不过去一个名为USD(Universal Scene Description,通用场景描述)的软件系统和文件格式。它允许以类似文件系统的层次方式来描述3D场景。由于USD是一个全面的框架,推荐阅读USD的文档以深入了解它。
为了让大家全面了解,这里介绍一些必须掌握的USD概念。
-
原始对象(Primitives,简称Prims):这些是USD场景的基本构建块。可以将它们视为场景图中的节点。每个节点可以是一个网格(mesh)、灯光(light)、相机(camera)或变换(transform)。它也可以是一组其他的原始对象。
-
属性(Attributes):这些是原始对象的属性。可以将它们视为键值对。例如,一个原始对象可以有一个名为颜色的属性,其值为红色。
-
关系(Relationships):这些是原始对象之间的连接。可以将它们视为指向其他原始对象的指针。例如,一个网格原始对象可以与一个材质原始对象有一个关系,用于遮光。
这些原始对象及其属性和关系的集合被称为USD展台(stage)。它可以被视为场景中所有原始对象的容器。当我们说我们在设计一个场景时,实际上我们是在设计一个USD展台。
虽然直接使用USD API提供了很大的灵活性,但学习和使用它可能会比较繁琐。为了简化场景设计,Orbit在USD API的基础上构建,提供了一个配置驱动的接口来将原始对象生成到场景中。这些功能包含在sim.spawners模块中。
在场景中生成原始对象时,每个原始对象需要一个定义了原始对象属性和关系(通过材料和阴影区信息)的配置类实例。然后,指定了原始对象的名称和变换的配置类,被传递给其相应的函数。函数随后将原始对象生成到场景中。
抽象的来看,一般是这样的
# Create a configuration class instance
cfg = MyPrimCfg()
prim_path = "/path/to/prim"# Spawn the prim into the scene using the corresponding spawner function
spawn_my_prim(prim_path, cfg, translation=[0, 0, 0], orientation=[1, 0, 0, 0], scale=[1, 1, 1])
# OR
# Use the spawner function directly from the configuration class
cfg.func(prim_path, cfg, translation=[0, 0, 0], orientation=[1, 0, 0, 0], scale=[1, 1, 1])
在这里,我们展示如何在场景中生成各种不同的原始对象。想要了解更多可用的生成器(spawners),请参考Orbit中的sim.spawners模块。
生成一个地面平面
sim.spawners.GroundPlaneCfg用于配置一个网格状的地面平面,并且可以修改其属性,比如外观和大小。
# Ground-planecfg_ground = sim_utils.GroundPlaneCfg()cfg_ground.func("/World/defaultGroundPlane", cfg_ground)
生成灯光
可以在展台上生成不同类型的灯光原始对象,包括远光、球形灯、圆盘灯和圆柱灯。在这里,我们生成一个远光,这是一种来自无限远处、只向一个方向照射的灯光。
# spawn distant lightcfg_light_distant = sim_utils.DistantLightCfg(intensity=3000.0,color=(0.75, 0.75, 0.75),)cfg_light_distant.func("/World/lightDistant", cfg_light_distant, translation=(1, 0, 10))
生成基本图形(primitive shapes)
在介绍如何生成基本形状之前,我们先介绍一个名为变换原始对象(或Xform)的概念。变换原始对象是一种只包含变换属性的原始对象。它用于将其他原始对象分组并作为一个整体进行变换。在这里,我们创建一个Xform原始对象,将所有基本图形分组在其下。
# create a new xform prim for all objects to be spawned underprim_utils.create_prim("/World/Objects", "Xform")
接下来,使用sim.spawners.ConeCfg类生成一个圆锥。我们可以指定圆锥的半径、高度、物理属性和材质属性。默认情况下,物理和材质属性是禁用的。
我们生成的前两个圆锥Cone1和Cone2是视觉元素,没有启用物理效果。
# spawn a red conecfg_cone = sim_utils.ConeCfg(radius=0.15,height=0.5,visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.0, 0.0)),)cfg_cone.func("/World/Objects/Cone1", cfg_cone, translation=(-1.0, 1.0, 1.0))cfg_cone.func("/World/Objects/Cone2", cfg_cone, translation=(-1.0, -1.0, 1.0))
对于第三个圆锥ConeRigid,我们通过在配置类中设置属性,为其添加了刚体物理效果。通过这些属性,我们可以指定圆锥的质量、摩擦力系数和弹性系数。如果不指定,它们将默认使用USD物理设置的默认值。
# spawn a red conecfg_cone = sim_utils.ConeCfg(radius=0.15,height=0.5,visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.0, 0.0)),)cfg_cone.func("/World/Objects/Cone1", cfg_cone, translation=(-1.0, 1.0, 1.0))cfg_cone.func("/World/Objects/Cone2", cfg_cone, translation=(-1.0, -1.0, 1.0))
通过其他文件生成
最后,还可以从其他文件格式中生成原始对象,如其他USD、URDF或OBJ文件。在这里,我们将一个桌子的USD文件生成到场景中。桌子是一个网格原始对象,并且有一个与之关联的材质原始对象。所有这些信息都存储在其USD文件中。
# spawn a usd file of a table into the scenecfg = sim_utils.UsdFileCfg(usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Mounts/SeattleLabTable/table_instanceable.usd")cfg.func("/World/Objects/Table", cfg, translation=(0.0, 0.0, 1.05))
上述的桌子实际上是作为一个引用被添加到场景中。用通俗的话来说,这意味着桌子实际上没有被直接添加到场景中,而是添加了一个指向桌子的指针。这允许我们以非破坏性的方式对桌子做出修改并在场景中反映出其变化。例如,我们可以改变桌子的材质,而无需直接修改桌子的底层文件。只有变化会被存储在USD展台中。
运行脚本
我们通过在命令行输入以下命令来运行脚本
./orbit.sh -p source/standalone/tutorials/00_sim/spawn_prims.py
模拟开始,应该能看到一个窗口,里面有一个地面平面、灯光、一些圆锥和一个桌子。启用了刚体物理的绿色圆锥应该会掉落并与桌子及地面平面发生碰撞。其他的圆锥是视觉元素,应该保持静止。要停止模拟,你可以关闭窗口,或在终端中按Ctrl+C。

指南02为在Orbit中,向场景生成各种原始对象提供了基础,展示了Orbit场景设计的基本概念以及如何使用生成器(spawners)。在接下来的指南中,我们将探讨如何与场景和模拟进行交互。
相关文章:
Orbit 使用指南 02 | 在场景中生成原始对象| Isaac Sim | Omniverse
如是我闻: Orbit使用指南02将 深入探讨如何使用Python代码在Orbit中向场景生成各种对象(或原始对象)。一起探索如何生成地面平面、灯光、基本图形形状以及来自USD文件的网格。前置知识:如何生成空白场景,Orbit 使用指…...
【2024】利用python爬取csdn的博客用于迁移到hexo,hugo,wordpress...
前言 博主根据前两篇博客进行改进和升级 利用python爬取本站的所有博客链接-CSDN博客文章浏览阅读955次,点赞6次,收藏19次。定义一个json配置文件方便管理现在文件只有用户名称,后续可加配置读取用户名称,并且将其拼接成csdn个人博客链接ty…...
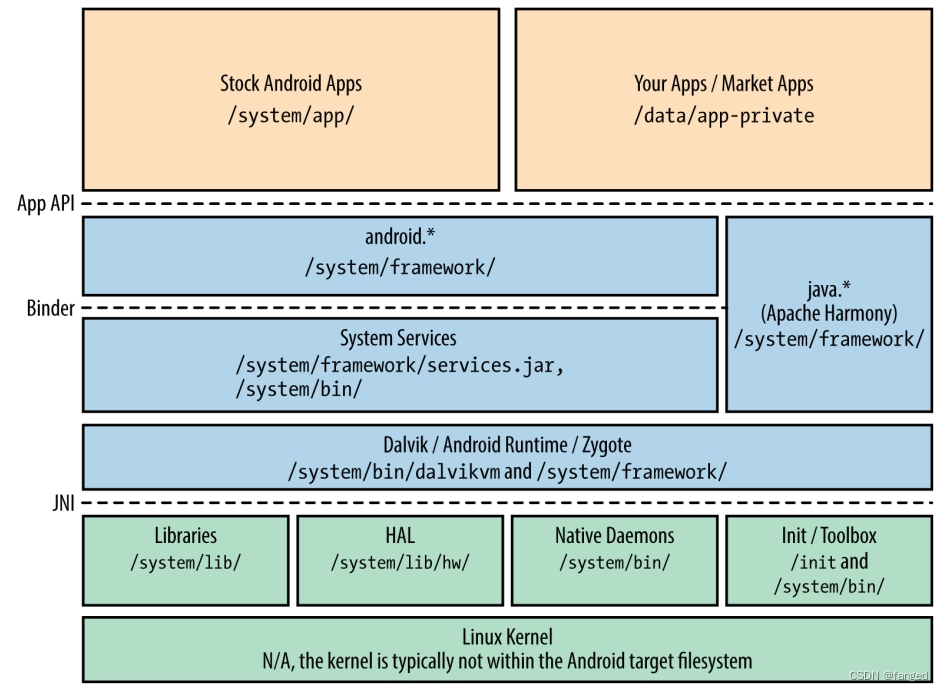
从嵌入式Linux到嵌入式Android
最近开始投入Android的怀抱。说来惭愧,08年就听说这东西,当时也有同事投入去看,因为恶心Java,始终对这玩意无感,没想到现在不会这个嵌入式都快要没法搞了。为了不中年失业,所以只能回过头又来学。 首先还是…...

蓝桥ACM培训-实战1
前言: 今天老师没讲课,只让我们做了一下几道题目。 正文: Problem:A 小蓝与操作序列: #include<bits/stdc.h> using namespace std; stack<int> a; int main(){int n,flag1,ans;string cz;cin>>n;for(int i1;…...
)
波动数列(蓝桥杯)
问题描述: 观察如下数列: 1 3 0 2 -1 1 -2 … 这个数列中后一项总是比前一项增加 2 或者减少 3。 栋栋对这种数列很好奇,他想知道长度为 n nn 和为 s ss 而且后一项总是比前一项增加 a aa 或者减少 b bb 的整数数列可能有多少种呢?…...
第二篇【传奇开心果系列】Python的自动化办公库技术点案例示例:深度解读Pandas金融数据分析
传奇开心果博文系列 系列博文目录Python的自动化办公库技术点案例示例系列 博文目录前言一、Pandas 在金融数据分析中的常见用途和功能介绍二、金融数据清洗和准备示例代码三、金融数据索引和选择示例代码四、金融数据时间序列分析示例代码五、金融数据可视化示例代码六、金融数…...
Flink:Temporal Table Function(时态表函数)和 Temporal Join
博主历时三年精心创作的《大数据平台架构与原型实现:数据中台建设实战》一书现已由知名IT图书品牌电子工业出版社博文视点出版发行,点击《重磅推荐:建大数据平台太难了!给我发个工程原型吧!》了解图书详情,…...
Go语言中的时间控制:定时器技术详细指南
Go语言中的时间控制:定时器技术详细指南 引言定时器基础创建和使用time.Timer使用time.Ticker实现周期性任务定时器的内部机制小结 使用time.Timer实现简单的定时任务创建和启动定时器停止和重置定时器定时器的实际应用小结 利用time.Ticker处理重复的定时任务创建和…...
面试笔记系列六之redis+kafka+zookeeper基础知识点整理及常见面试题
目录 Redis redis持久化机制:RDB和AOF Redis 持久化 RDB的优点 RDB的缺点 AOF 优点 AOF 缺点 4.X版本的整合策略 Redis做分布式锁用什么命令? Redis做分布式锁死锁有哪些情况,如何解决? Redis如何做分布式锁?…...

Golang动态高效JSON解析技巧
JSON如今广泛用于配置和通信协议,但由于其定义的灵活性,很容易传递错误数据。本文介绍了如何使用mapstructure工具实现动态灵活的JSON数据解析,在牺牲一定性能的前提下,有效提升开发效率和容错能力。原文: Efficient JSON Data Ha…...
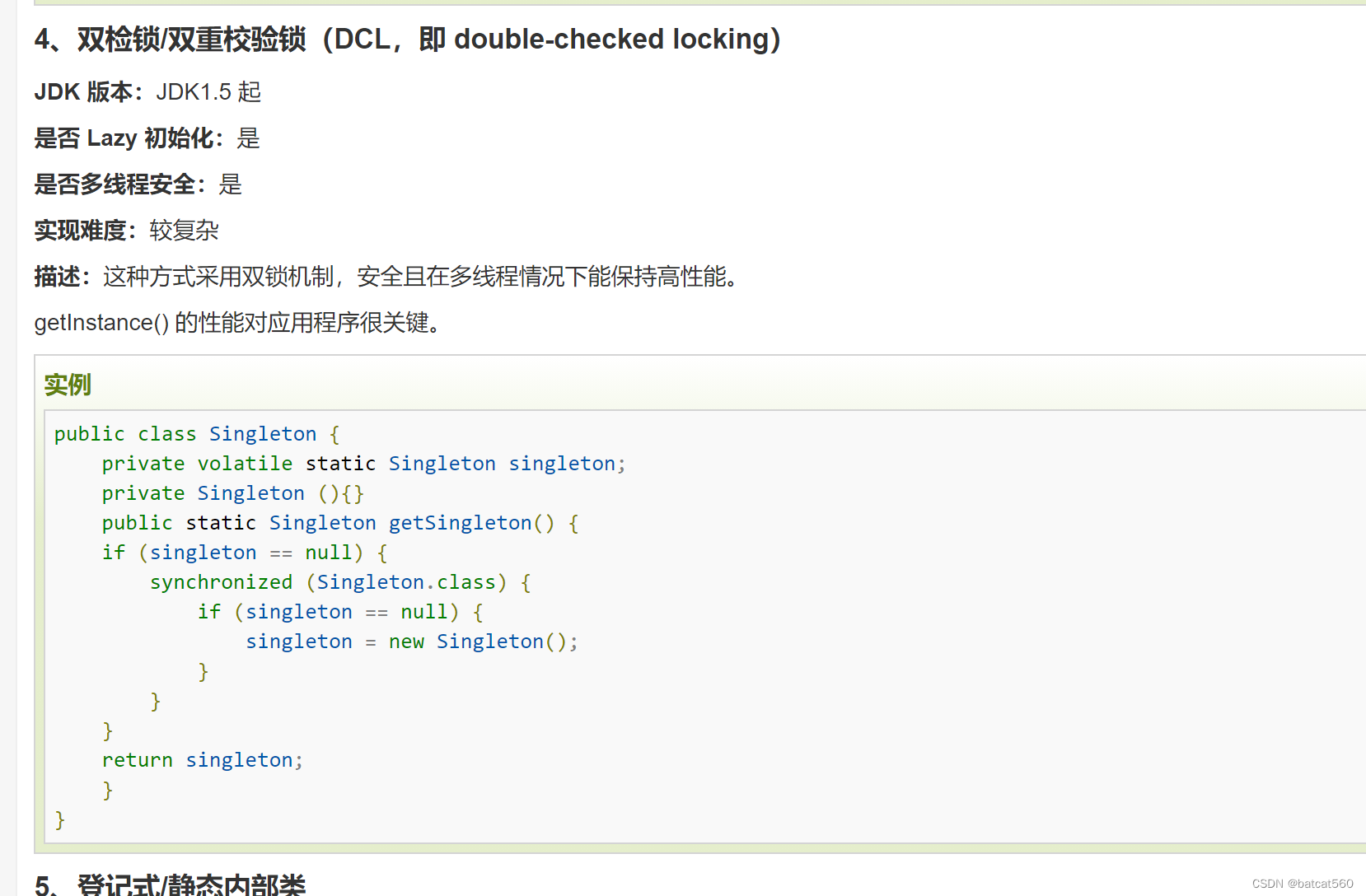
双重检验锁
双重检验锁:设计模式中的单例模式,细分为单例模式中的懒加载模式。 单例模式 单例模式:指的是一个类只有一个对象。最简单的实现方式是设一个枚举类,只有一个对象。缺点是当对象还没有被使用时,对象就已经创建存在了…...
)
【RISC-V 指令集】RISC-V DSP 扩展指令集介绍(一)
前言: 本笔记是基于对RISC-V DSP扩展指令集文档总结的,《P-ext-proposal.pdf》文档的关键内容如下: 主要介绍了RISC-V的P扩展指令集及其相关细节。 首先,对P扩展指令进行了概述,并列出了其与其他扩展重复的指令。 …...

RocketMQ - CentOS 7.x 安装单机版并测试
【安装前环境准备】检查是否安装好JDK(必要):java -version查看CPU信息: # cat /proc/cpuinfo # lscpu # getconf _NPROCESSORS_ONLN # cat /sys/devices/system/cpu/online # cat /proc/interrupts | egrep -i cpu查看内存信息: # free -hm …...
[JavaWeb玩耍日记]HTML+CSS+JS快速使用
目录 一.标签 二.指定css 三.css选择器 四.超链接 五.视频与排版 六.布局测试 七.布局居中 八.表格 九.表单 十.表单项 十一.JS引入与输出 十二.JS变量,循环,函数 十三.Array与字符串方法 十四.自定义对象与JSON 十五.BOM对象 十六.获取…...
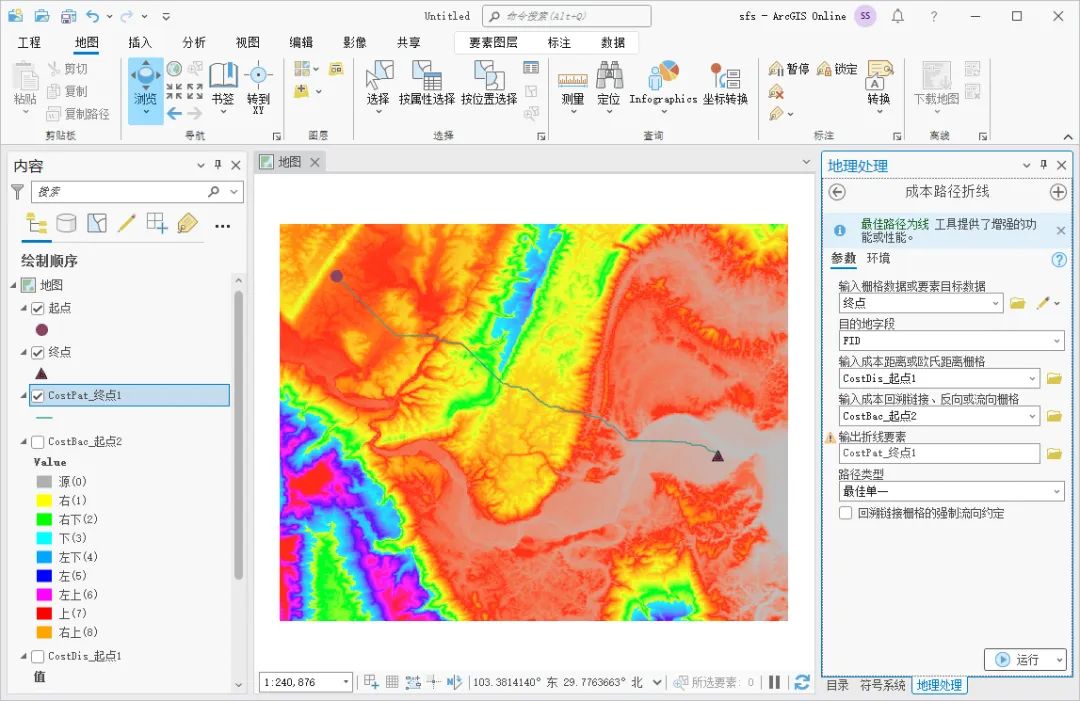
如何使用ArcGIS Pro创建最低成本路径
虽然两点之间直线最短,但是在实际运用中,还需要考虑地形、植被和土地利用类型等多种因素,需要加权计算最低成本路径,这里为大家介绍一下计算方法,希望能对你有所帮助。 数据来源 教程所使用的数据是从水经微图中下载…...
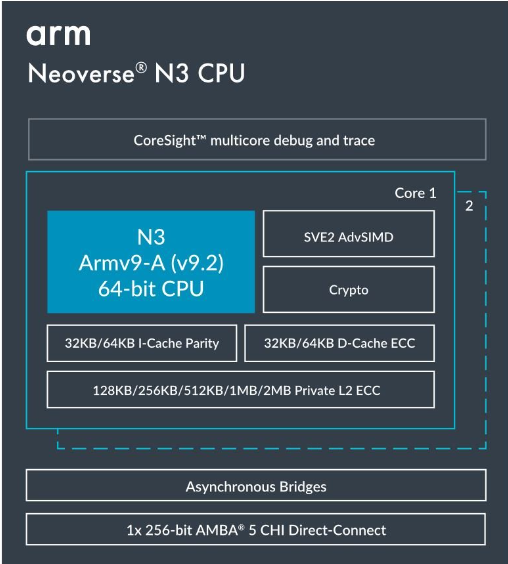
Neoverse CSS N3:实现市场领先能效的最快途径
区分老的架构 从云到边缘,Arm Neoverse 提供无与伦比的性能、效率、设计灵活性和 TCO 优势,正在颠覆传统基础设施芯片。 我们看到云和超大规模服务运营商正在推动更高的计算密度。随着 128 核心 CPU 设计上市(Microsoft Cobalt、阿里巴巴 Y…...

JavaScript实现的计时器效果
之前做过电商网站倒计时的效果,今天在倒计时的基础上,把代码修改了一下,改为计时器效果,实现了以下功能: 1.点击“开始”后,按秒计时且“开始”文字变为“停止”; 2.点击“停止”,计…...
))
仿函数(Functor(c++))
定义 仿函数(Functor)是一个可以像函数那样被调用的类对象。这意味着它实现了operator(),使得类的对象可以像函数那样被调用。 仿函数的主要特点 它是一个类。它重载了operator()。可以通过创建该类的对象,并像函数那样调用该对…...
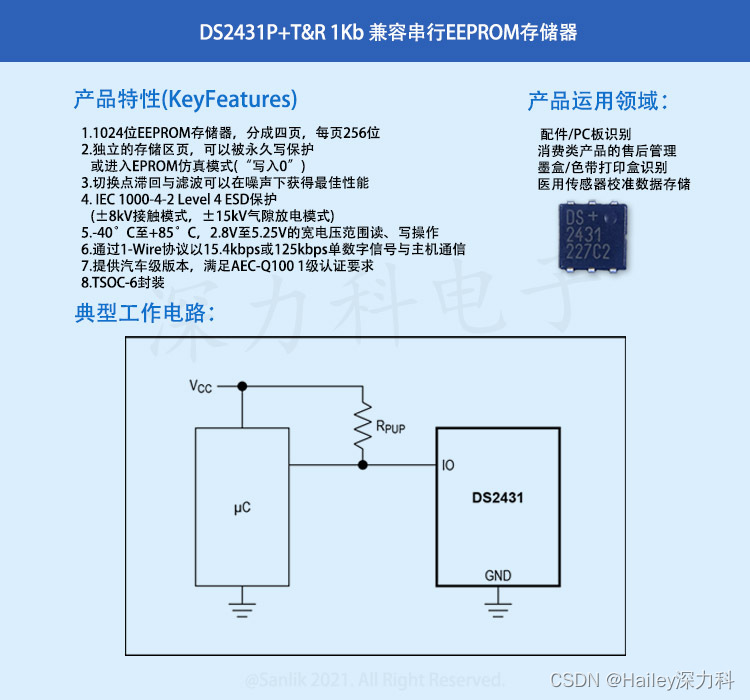
智能汽车加速车规级存储应用DS2431P+TR 汽车级EEPROM 存储器IC
DS2431PT&R是一款1024位1-Wire EEPROM芯片,由四页存储区组成,每页256位。数据先被写入一个8字节暂存器中,经校验后复制到EEPROM存储器。该器件的特点是,四页存储区相互独立,可以单独进行写保护或进入EPROM仿真模式…...

js json转换成字符串
js中JSON数据转换成字符串,可以使用JSON.stringify()方法。 var obj {name: "张三", age: 18, gender: "男"}; var jsonString JSON.stringify(obj); console.log(jsonString); // 输出 {"name":"张三","age"…...

机器学习辅助第一性原理:高精度计算电化学氧化还原电位
1. 项目概述:当机器学习遇上第一性原理,破解电化学模拟的精度瓶颈在电化学、材料科学和计算化学的交叉领域,预测一个分子或离子在溶液中的氧化还原电位,就像试图在暴风雨中测量一滴雨滴的精确落点。这个数值,直接决定了…...

布里渊散射与机器学习势场协同表征MOF力学性能
1. 项目概述:当布里渊散射遇见机器学习势场在材料科学的前沿探索中,我们常常面临一个核心挑战:如何精确、无损地获取复杂材料的本征力学性能,尤其是那些结构精巧但晶体尺寸微小的新材料。金属有机框架(MOFs)…...

量子机器学习分类器性能杀手:数据诱导随机性与类间隔理论解析
1. 项目概述 量子机器学习(QML)这几年挺火的,大家都想看看量子计算能不能在机器学习任务上带来点新东西。但说实话,很多早期的实验和理论分析都指向一个挺让人头疼的问题:模型动不动就“学废了”。表现就是,…...

子黎曼几何与庞特里亚金原理:约束系统时间最优控制
1. 从黎曼到子黎曼:当几何遇见约束 在物理和工程的世界里,我们常常需要为系统寻找一条“最优”的路径。无论是让量子比特以最快的速度演化到目标态,还是规划机器人在复杂地形中的最短时间轨迹,其背后都隐藏着一个深刻的几何问题&a…...

相对噪声模型下梯度下降的收敛性分析与实践指南
1. 项目概述:当梯度方向遇上相对噪声在机器学习和优化的世界里,梯度下降算法就像我们手中的指南针,指引着我们在复杂的高维地形中寻找最低点。但现实往往没那么理想,这个指南针的指针会晃动,我们得到的梯度方向总带着“…...

量子计算中的Jacobi-Davidson方法原理与应用
1. 量子计算中的Jacobi-Davidson方法概述量子计算为解决复杂量子系统的基态和激发态能量计算问题提供了新的可能性。在经典计算中,Jacobi-Davidson(JD)方法因其高效的子空间迭代特性而广受推崇。当我们将这一方法移植到量子计算框架下时,它展现出了更强大…...

Mamba-X:为Vision Mamba模型定制的边缘AI硬件加速器架构解析
1. 项目概述:当视觉Transformer遇上状态空间模型最近在边缘AI硬件加速的圈子里,一个名为“Mamba-X”的设计概念开始被频繁讨论。这名字听起来有点神秘,但核心其实很明确:它瞄准的是当下两个最火热的AI架构趋势——Vision Transfor…...

BU-CVKit:模块化计算机视觉框架赋能跨物种动物行为分析
1. 项目概述:从实验室到旷野,一个框架的野心在计算机视觉研究领域,尤其是动物行为学和生态学方向,我们常常面临一个尴尬的局面:针对小鼠开发的追踪算法,拿到斑马鱼身上就水土不服;为猕猴设计的姿…...

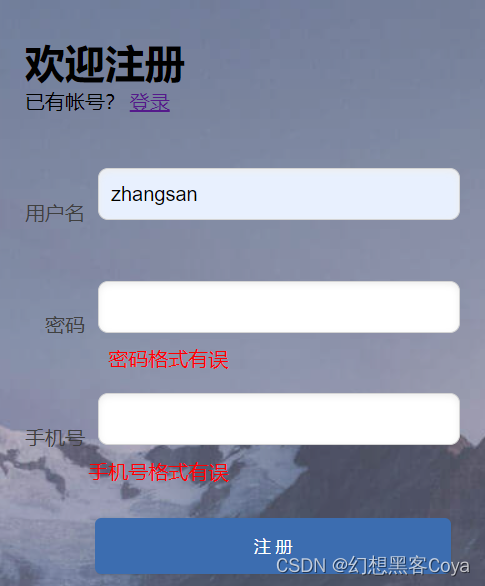
告别眨眼误判!用Python+OpenCV优化人脸68关键点疲劳检测的3个实用技巧
告别眨眼误判!用PythonOpenCV优化人脸68关键点疲劳检测的3个实用技巧在计算机视觉应用中,人脸关键点检测一直是热门研究方向。特别是68关键点检测技术,因其在表情识别、疲劳监测等场景中的实用性而备受关注。然而,许多开发者在实际…...

Playwright 浏览器自动化完全指南:从入门到实战
目录 一、什么是 Playwright二、Playwright vs Selenium:为什么选择 Playwright三、支持的语言与浏览器四、核心架构与执行流程五、环境安装与验证六、第一个程序:打开网页并截图七、常用操作速查八、元素定位详解九、自动等待机制深度解析十、浏览器上…...