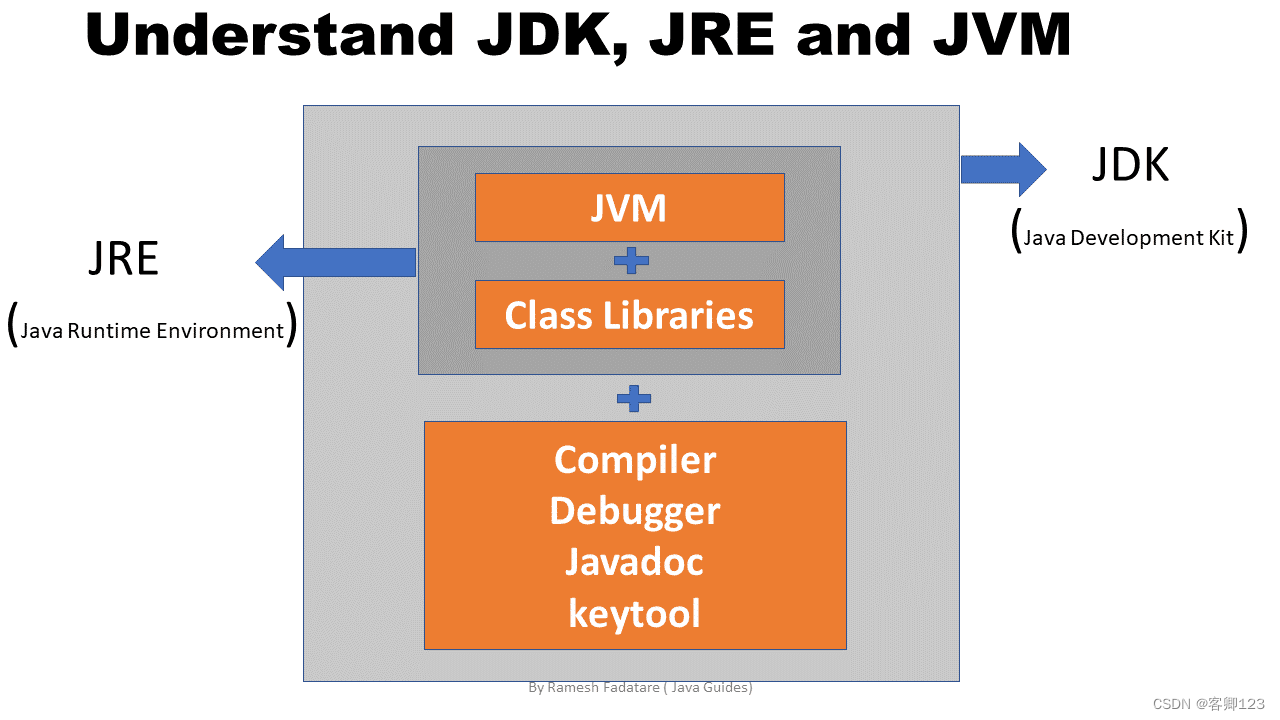
OpenMMlab AI实战营第四期培训
OpenMMlab AI实战营第四期培训
- OpenMMlab实战营
- 第四次课2023.2.6
- 学习参考
- 一、什么是目标检测
- 1.目标检测下游视觉任务
- 2.图像分类 v.s. 目标检测
- 二、目标检测实现
- 1.滑窗 Sliding Window
- 2.滑窗的效率问题
- 3.改进思路
- (1)消除滑窗中的重复计算
- (2)在特征图上进行密集预测
- (3)目标检测的基本范式
- 4.目标检测技术的演进
- 三、基础知识
- 1.框,边界框(Bounding Box)
- (1)定义
- (2)常见概念
- (3)交并比 Intersection Over Unio
- (4)置信度 Confidence Score
- (5)非极大值抑制 Non-Maximum Suppression
- (6)边界框回归 Bounding Box Regression
- (7)边界框编码 Bbox Coding
- 四、两阶段目标检测算法
- 1.两阶段算法的概述
- 2.Region-based CNN (2013)
- (1)R-CNN思路
- (2)R-CNN训练
- (3)R-CNN 的问题
- 3.Fast R-CNN (2014)
- (1)Fast R-CNN思路
- (2)RoI Pooling
- (3)RoI Align
- (4)Fast R-CNN 的训练
- 3.朴素方法的局限
- (1)锚框 Anchor
- 4.Faster R-CNN (2015)
- (1)Faster R-CNN (2015)思路
- (2)Faster R-CNN (2015)训练
- 5.两阶段方法的发展与演进 (2013~2017)
- 五、多尺度检测技术
- 1.多尺度检测技术的提出
- 2.图像金字塔 Image Pyramid
- 3.层次化特征
- 4.特征金字塔网络 Feature Pyramid Network (2016)
- 5.在 Faster R-CNN 模型中使用 FPN
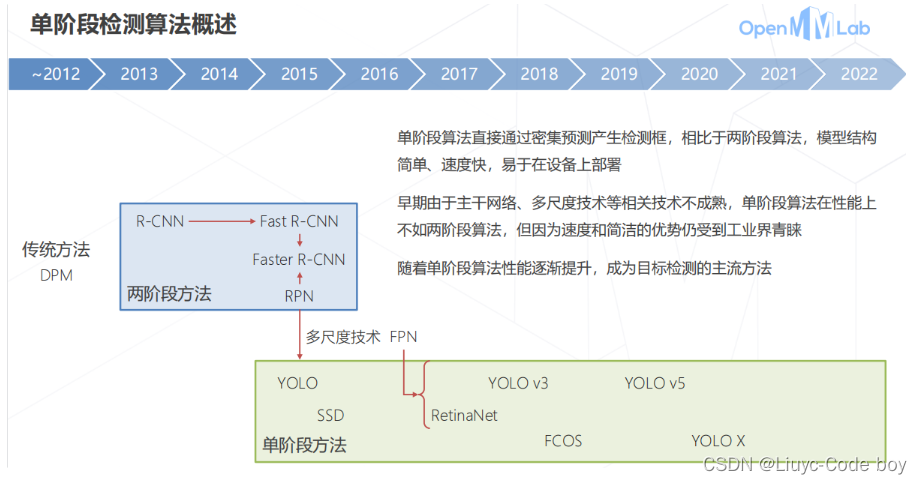
- 六、单阶段目标检测算法
- 1.单阶段算法的概述
- 2.**YOLO: You Only Look Once (2015)**
- (1)YOLO(2015)思想
- (2)优缺点:
- 3.**SSD: Single Shot MultiBox Detector (2016)**
- (1)SSD思想
- (2)SSD的损失函数:
- (3)SSD正负样本不均衡问题
- (4)解决样本不均衡问题
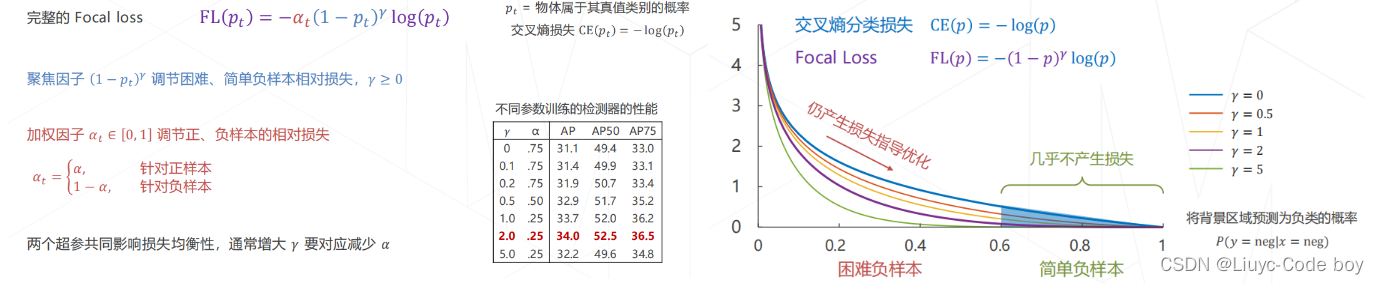
- (5)Focal Loss
- 4.RetinaNet(2017)
- 七、无锚框目标检测算法
- 1.锚框 v.s. 无锚框
- 2.FCOS, Fully Convolutional One-Stage (2019)
- 3.CenterNet (2019)
- 八、Detection Transformers
- 1.DETR(2020)
- 2.Deformable DETR (2021)
- 九、目标检测模型的评估方法
- 1.检测结果的正确/错误类型
- 2.准确率 Precision 与 召回率 Recall
- 3.PR 曲线 与 AP 值
- 子豪兄的补充
- 1.目标检测算法的改进思路
OpenMMlab实战营
第四次课2023.2.6
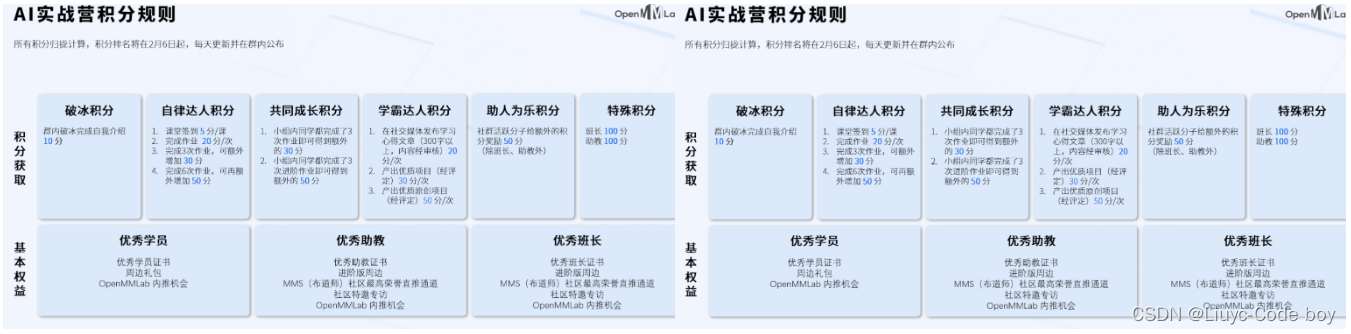
此次实战营的积分规则介绍:
学习参考
笔记建议结合ppt来学习使用,ppt中对应知识可以参照笔记的标题进行查看。
ppt:lesson4_ppt
b站回放:OpenMMLab AI 实战营
往期笔记:笔记回顾
相关学习推荐:
-
同济子豪兄(大佬):子豪兄b站主页
-
OpenMMlab主页:OpenMMla主页
-
OpenMMlab Github仓库链接:Github OpenMMlab
-
MMDetection Github仓库链接:Github MMDetection
-
OpenMMlab 此次AI实战营的仓库:AI实战营github
一、什么是目标检测
与分类问题不同,目标检测的目标是在检测图像中物体类别的同时用矩形框框出所有感兴趣的物体。
例如:
- 相机中的人脸拍照识别,就需要先把人脸识别出来
- 智慧城市,垃圾检测、违章停车检测、危险行为检测等等
- 自动驾驶,环境感知、路线规划与控制
1.目标检测下游视觉任务
目标检测的一些具体的下游任务,例如:
- 两阶段光学字符识别算法
- 首先检测出文字出现的区域
- 识别区域中的文子
- 两阶段人体姿态估计算法
- 人体检测(把图像中的人框出来)
- 单人姿态估计(具体分析每个人的姿态是什么样的)
2.图像分类 v.s. 目标检测
我们从下表所示的不同点与相同点的角度来比较图像分类与目标检测:
| 图像分类 | 目标检测 | |
|---|---|---|
| 通常只有一个物体 | 物体数量不固定 | |
| 不同点 | 通常位于图像中央 | 物体位置不固定 |
| 通产占据主要面积 | 物体大小不固定 | |
| 相同点 | 需要算法“理解”图像的内容(即,深度神经网络实现) | 需要算法“理解”图像的内容(即,深度神经网络实现) |
二、目标检测实现
1.滑窗 Sliding Window
- 首先,设定一个固定大小的窗口
- 其次,遍历图像所有位置,所到之处使用已经训练好的分类模型,识别窗口的内容
- 为了检测不同大小、不同形状的物体,可以使用不同大小、长宽比的窗口来扫描图片
也就是下图所示的,我们通过窗口获取图像中一个区域的内容,然后将该区域的图像传入一个例如卷积神经网络去预测里面是什么东西,下图所示的窗口中没有任何物体,所有返回类别**“背景”**。随着窗口的滑动,我们的预测类别会有所不同。

2.滑窗的效率问题
计算成本过于大,如下图所示:
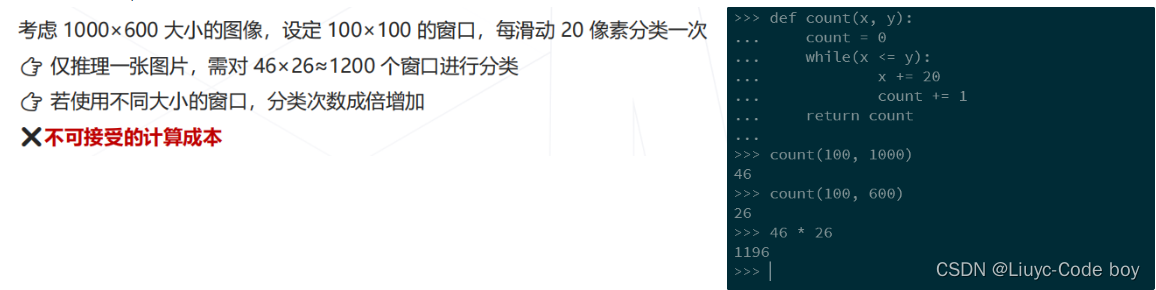
这1200个窗口都需要分别放入神经网络中去进行前向预测,所以计算量非常大。
3.改进思路
- 使用启发式算法替换暴力遍历
- 例如 R-CNN,Fast R-CNN 中使用 Selective Search 产生提议框
- 依赖外部算法,系统实现复杂,难以联合优化性能
- 减少冗余计算,使用卷积网络实现密集预测
- 目前普遍采用的方式
基于第二种改进的思路我们可以做这样的分析,如果两个窗口之间有重合的部分,能否设计一些算法使其避免计算重复部分。
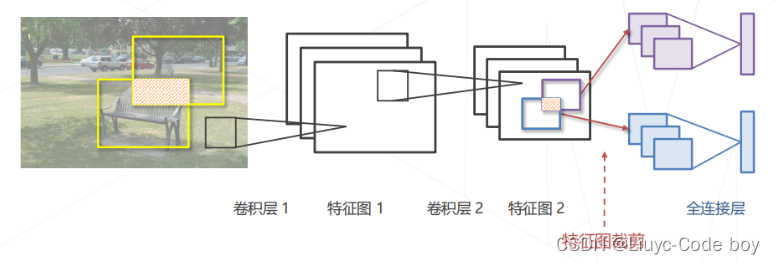
(1)消除滑窗中的重复计算
思路:用卷积一次性计算所有特征,再取出对应位置的特征完成分类
解释:
- 首先使用两层的卷积层提取出整张图片的特征图
- 然后窗口扫到那一部分,就从第二层的卷积层中取出相应区域的特征图后续实现分类任务
- 效果就是可以避免一些重叠区域重复计算特征(提前一次性全算好,随用随取)
- 原图滑窗 👉 重叠区域重复计算卷积 ❌
- 特征图滑窗 👉 重叠区域只计算一次卷积特征,与窗的个数无关 ✔️
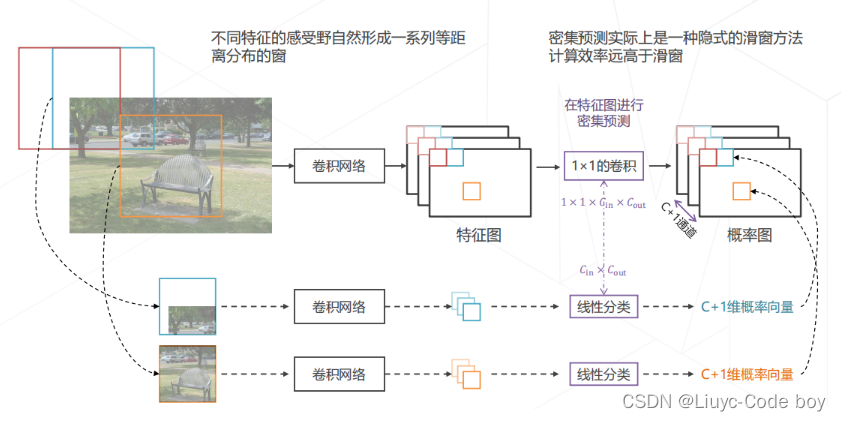
(2)在特征图上进行密集预测
思路:把特征图中某一个位置的特征取出来(由不同卷积核基于同一个感受野计算出来),随着卷积核的移动(卷积操作)由于步长(stride)的存在,我们的原图会在卷积核的平移过程中自然形成一系列等距离分布的窗。不同的窗产生了不同的特征,我们将不同的窗卷积之后产生的特征放入线性分类器去生产一个C+1维的概率向量来完成分类(+1的原因是考虑区域中可能没有物体,即背景)
解释:在上面通过卷积操作实现的隐式的滑窗的基础上,通过1x1的卷积实现维度变换,最终得到一个C+1维的概率图,使得计算效率远高于滑窗的一般实现。
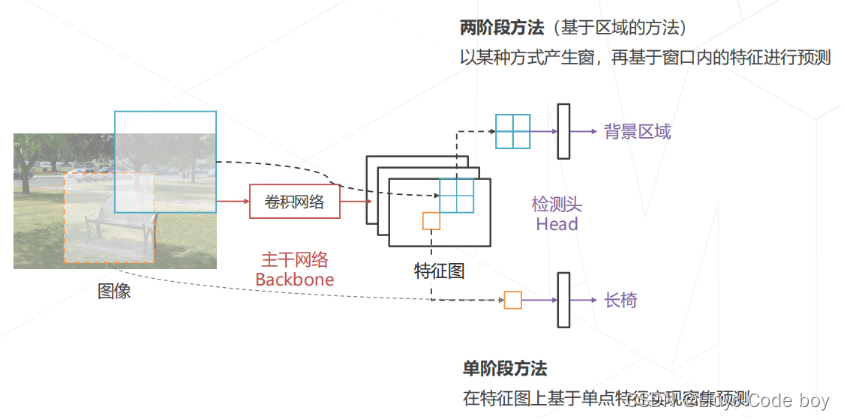
(3)目标检测的基本范式
- 两阶段方法
- 基于区域的方法
- 以某种方式产生窗,再基于窗口内的特征进行预测
- 单价段方法
- 在特征图上基于单点特征实现密集预测
- 隐式的滑窗
其中用于将原图计算出特征图的部分称为主干网络(Backbone),从特征图计算特定区域(滑窗区域)的部分称为检测头(Head)。
4.目标检测技术的演进
直接上图
这里子豪兄有推荐yolov5是已经经过开源检测的模型,所以yolo系列推荐使用v5

三、基础知识
1.框,边界框(Bounding Box)
(1)定义
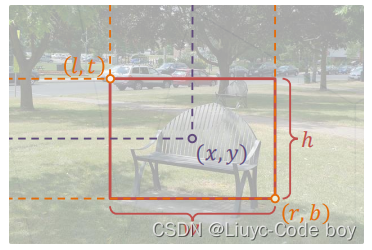
框泛指图像上的矩形框,边界横平竖直
描述一个框需要 4 个像素值:
-
方式1:左上右下边界坐标 (𝑙,𝑡, 𝑟, 𝑏)
-
方式2:中心坐标和框的长宽(𝑥, 𝑦, 𝑤, ℎ)
边界框通常指紧密包围感兴趣物体的框(框的边界和图像平行,除非有一些特殊的旋转框)
检测任务要求为图中出现的每个物体预测一个边界框
(2)常见概念
以下这些概念都指某种框,用在不同的上下文中:
-
区域(Region):框的同义词
-
区域提议(Region Proposal,Proposal):指算法预测的可能包含物体的框,某种识别能力不强的算法的初步预测结果
-
感兴趣区域(Region of Interest,RoI):当我们谈论需要进一步检测这个框中是否有物体时,通常称框为感兴趣区域
-
锚框(Anchor Box,Anchor):图中预设的一系列基准框,类似滑窗,一些检测算法会基于锚框预测边界框
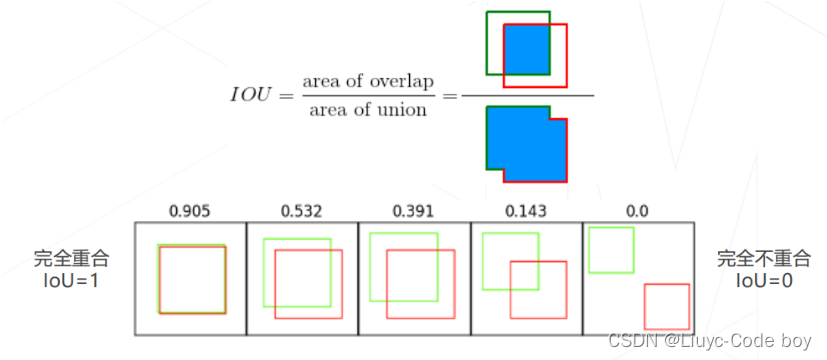
(3)交并比 Intersection Over Unio
交并比(IoU):两矩形框交集面积与并集面积之比,是矩形框重合程度的衡量指标
交并比∈[0, 1]
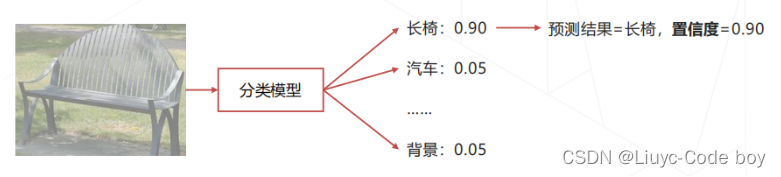
(4)置信度 Confidence Score
置信度(Confidence Score):模型认可自身预测结果的程度,通常需要为每个框预测一个置信度
-
大部分算法取分类模型预测物体属于特定类别的概率
-
部分算法让模型独立于分类单独预测一个置信度
我们倾向认可置信度高的预测结果:
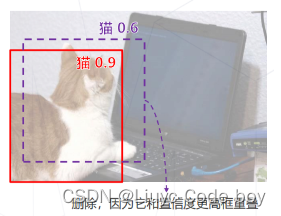
(5)非极大值抑制 Non-Maximum Suppression
滑窗类算法通常会在物体周围给出多个相近的检测框,这些框实际指向同一物体,只需要保留其中置信度最高的
通过非极大值抑制(NMS)算法实现:
输入:检测器产生的一系列检测框 𝐵 = {𝐵1, … , 𝐵𝑛 }及对应的置信度
𝑠 = {𝑠1, … , 𝑠𝑛} ,IoU 阈值 𝑡(通常0.7)
步骤:
-
初始化结果集 𝑅 = ∅
-
重复直至 𝐵 为空集
-
找出 𝐵 中置信度最大的框 𝐵𝑖 并加入 𝑅
-
从 𝐵 中删除 𝐵𝑖 以及与 𝐵𝑖 交并比大于 𝑡 的框
-
输出:结果集 𝑅
(6)边界框回归 Bounding Box Regression
问题
滑窗(或其他方式产生的基准框)与物体精准边界(回归问题)通常有偏差
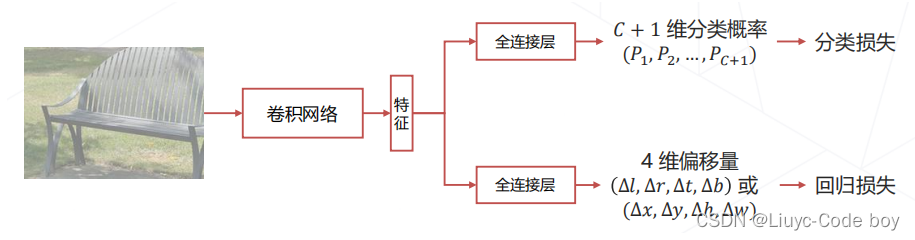
处理方法
让模型在预测物体类别同时预测边界框相对于滑窗的偏移量,通常采用多任务学习:
同时对于提取的滑窗区域内的图像提取特征后进行分类任务和回归任务,然后将两个损失同时处理(也许求和),然后用于反向传播梯度下降。
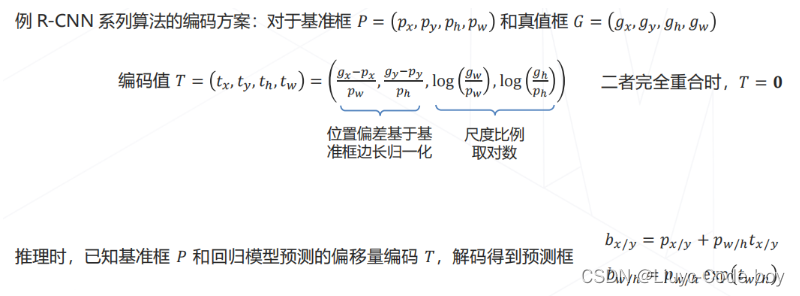
(7)边界框编码 Bbox Coding
直观上理解:
-
回归任务相较于分类任务比较难
-
边界框的绝对偏移量在数值上通常较大,不利于神经网络训练,通常需要对偏移量进行编码,作为回归模型的预测目标
通常的方法:
- 通常进行一些归一化或者对数尺度的归一化
- 让计算机使用编码后的结果(归一化后的结果)进行计算效率比较高
- 解码的时候再逆向使用编码的公式求回去,绘制编码框
四、两阶段目标检测算法
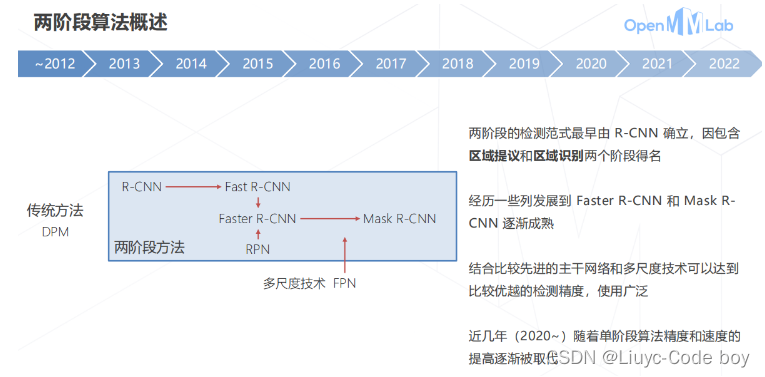
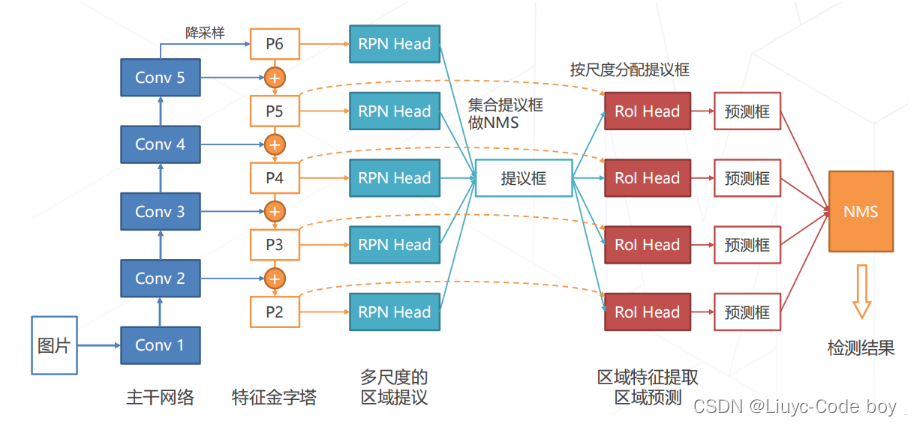
1.两阶段算法的概述
直接上图
2.Region-based CNN (2013)
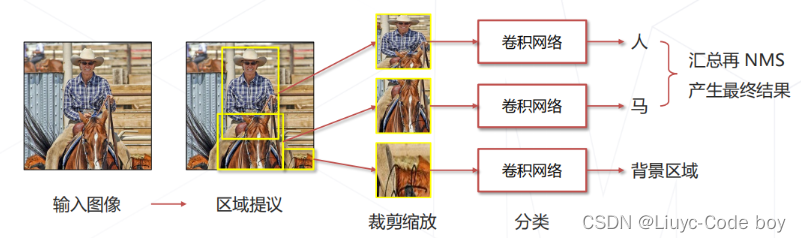
(1)R-CNN思路
**一阶段:**产生提议框
-
使用传统视觉算法,推测可能包含物体的框(约2000个)
-
✔️不漏:真正包含物体的框通常会被选中
-
❌不准:大部分大部分提议框并不包含物体
**二阶段:**识别提议框
-
将提议框内的图像缩放至固定大小(原始论文 227×227)
-
送入卷积网络进一步识别,得到准确结果
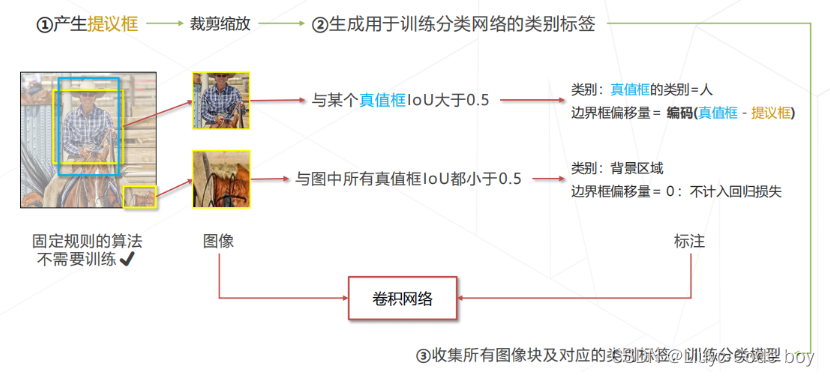
(2)R-CNN训练
直接上图
(3)R-CNN 的问题
慢:区域提议一般产生 2000 个框,每个框都需要送入 CNN 前传,推理一张图要几秒至几十秒

3.Fast R-CNN (2014)
➢ 改进 R-CNN:减少重复计算✔️
(1)Fast R-CNN思路
**一阶段:**产生提议框
- 仍然依赖传统CV方法
**二阶段:**识别提议框
- 卷积层应用于全图,一次性计算所有位置的图像特征
- 剪裁提议框对应的特征图送入全连接层计算分类
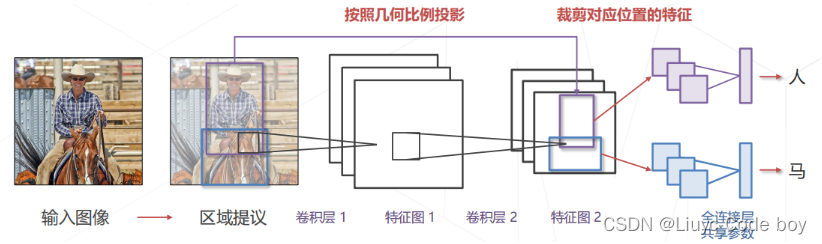
问题:提议框大小不同,需要处理成固定尺寸才能送入全连接层
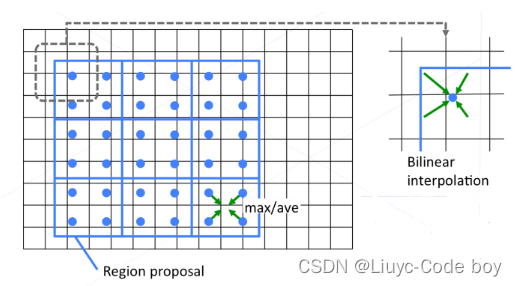
(2)RoI Pooling
目标:将不同尺寸的提议框处理成相同尺寸,使之可以送入后续的全连接层计算分类和回归
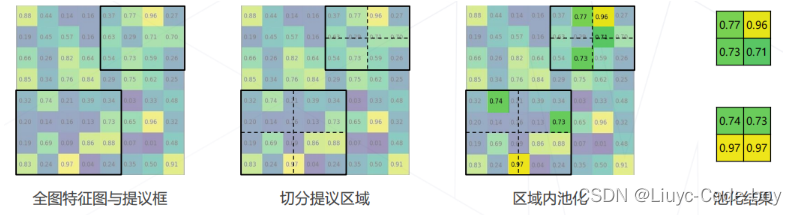
算法:
-
将提议框切分成固定数目的格子(上图中 2×2,实际常用 7×7,对齐ResNet等经典结构)
-
如果格子边界不在整数坐标,则膨胀至整数坐标
-
在每个格子内部池化,得到固定尺寸的输出特征图
(3)RoI Align
RoI Align 比 RoI Pooling 在位置上更精细
-
将提议区域切成固定数目的格子,例如 7×7
-
在每个格子中,均匀选取若干采样点,如 2×2=4 个
-
通过插值方法得到每个采样点处的精确特征
-
所有采样点做 Pooling 得到输出结果
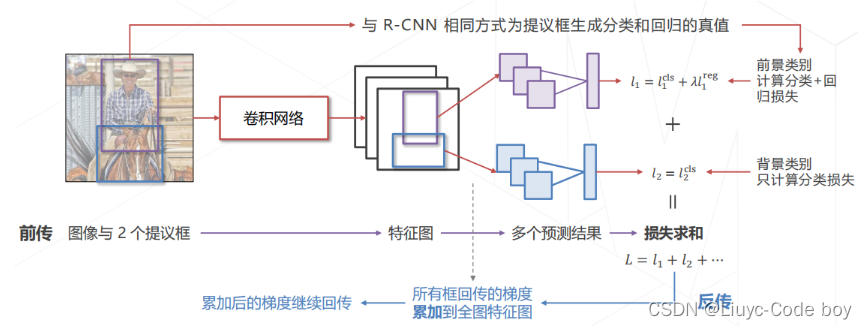
(4)Fast R-CNN 的训练
➢ 多任务学习、端到端训练
直接上图
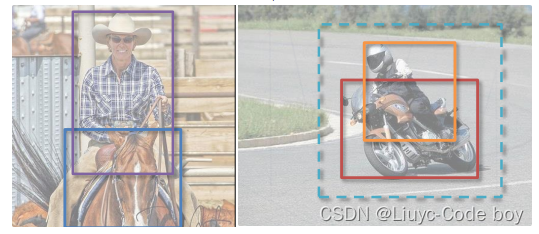
3.朴素方法的局限
上面提到的都是基于滑窗思想的朴素方法(最后都是一个二分类器),这会带来的局限就是当我们的图像
-
图中有不同大小的物体,区域提议算法需要产生不同尺寸的提议框,以适应不同尺寸的物体
-
物体可能有一定程度重合,区域提议算法要有能力在同一位置产生不同尺寸的提议框,以适应重合的情况(框中既有人也有摩托车,那么识别为哪一类呢)
下面两张图分别对应了两个问题
(1)锚框 Anchor
在原图上设置不同尺寸的基准框,称为锚框,基于特征独立预测每个锚框中是否包含物体
-
可以生成不同尺寸的提议框
-
可以在同一位置生成多个提议框覆盖不同物体

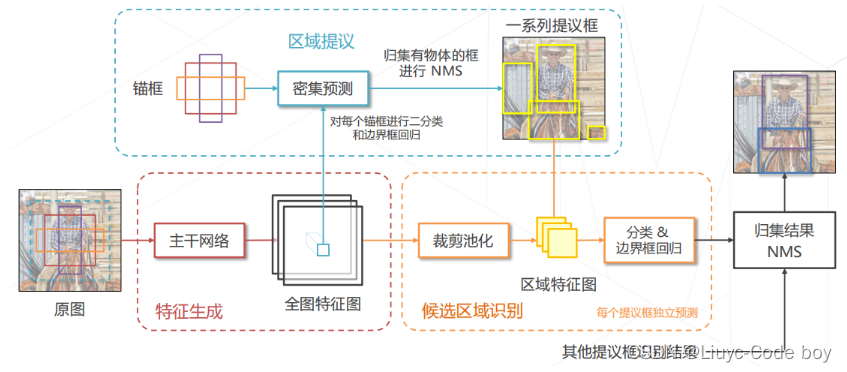
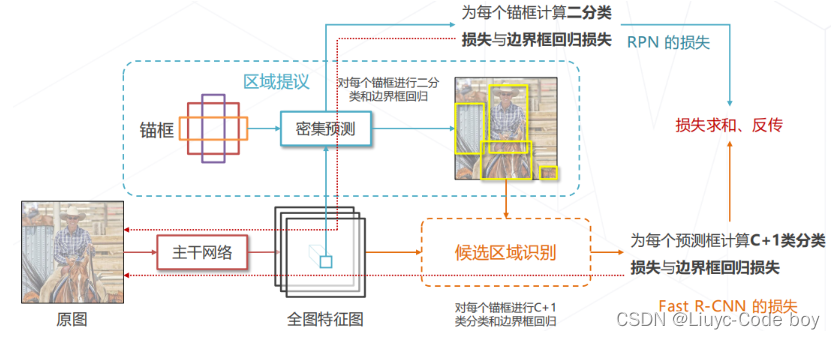
4.Faster R-CNN (2015)
(1)Faster R-CNN (2015)思路
➢ Faster R-CNN = RPN + Fast R-CNN 二者共享主干网络和特征
直接上图
(2)Faster R-CNN (2015)训练
➢ 联合学习 RPN 与 Fast R-CNN
注:为锚框和预测框产生分类和回归真值的方法与 R-CNN相同,即基于 IoU 为锚框和预测框匹配真值框
直接上图
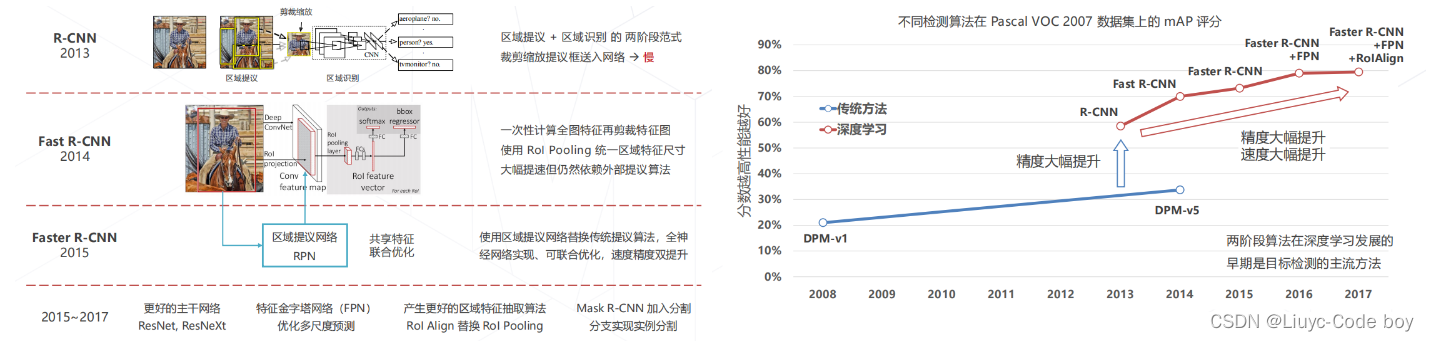
5.两阶段方法的发展与演进 (2013~2017)
直接上图
五、多尺度检测技术
1.多尺度检测技术的提出
图像中物体大小可能有很大差异 (10 px ~ 500 px)
多尺度技术出现之前,模型多基于单级特征图进行预测,通常为主干网络的倒数第二层,受限于结构(感受野)和锚框的尺寸范围,只擅长中等大小的物体。另一方面,高层特征图经过多次采样,位置信息逐层丢失,小物体检测能力较弱,定位精度较低。
2.图像金字塔 Image Pyramid
由于卷积操作会使得图像逐渐变小,卷积核所包含的信息越来越全局。所以提取的特征会越来越具体,越来越具有语义特征。
而图像金字塔就是基于卷积操作的这种特性提出来的:
-
将图像缩放到不同大小,形成图像金字塔
-
检测算法在不同大小图像上即可检测出不同大小物体
-
优势:算法不经改动可以适应不同尺度的物体
-
劣势:计算成本成倍增加
-
可用于模型集成等不在意计算成本的情况

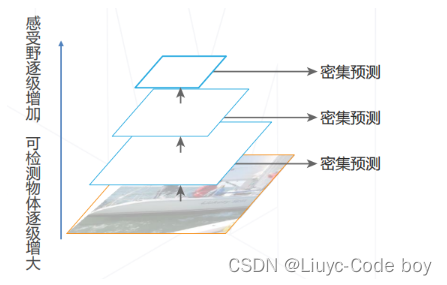
3.层次化特征
基于主干网络自身产生的多级特征图产生预测结果
由于不同层的感受大小不同,因此不同层级的特征天然适用于检测不同尺寸的物体
-
优势:计算成本低
-
劣势:低层特征抽象级别不够,预测物体比较困难
-
**改进思路:**高层次特征包含足够抽象语义信息。将
-
高层特征融入低层特征,补充低层特征的语义信息
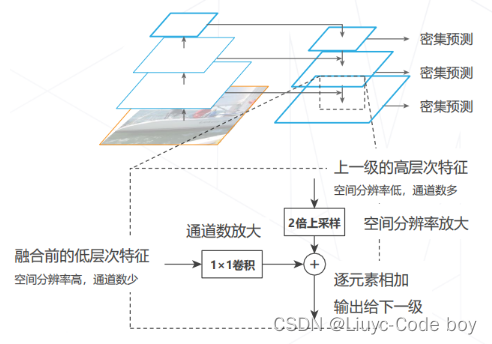
4.特征金字塔网络 Feature Pyramid Network (2016)
-
改进思路:高层次特征包含足够抽象语义信息。将高层特征融入低层特征,补充低层特征的语义信息
-
融合方法:特征求和
5.在 Faster R-CNN 模型中使用 FPN
直接上图
六、单阶段目标检测算法
1.单阶段算法的概述
直接上图,在单阶段的目标检测算法中最成功的就是YOLO。
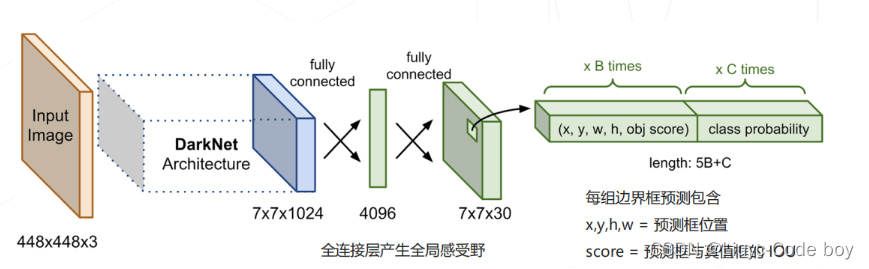
2.YOLO: You Only Look Once (2015)
(1)YOLO(2015)思想
最早的单阶段算法之一
-
主干网络:自行设计的 DarkNet 结构,产生 7×7×1024 维的特征图
-
检测头:2 层全连接层产生 7×7 组预测结果,对应图中 7×7 个空间位置上物体的类别和边界框的位置
-
最终不只是判断出该区域是否有物体,而且能够预测出是什么物体
(2)优缺点:
-
优点
- **
快!**在Pascal VOC 数据集上,使用自己设计的 DarkNet 结构可以达到实时速度,使用相同的 VGG可以达到 3 倍于 Faster R-CNN 的速度 
- **
-
缺点
- 由于每个格子只能预测 1 个物体,因此对重叠物体、尤其是大量重叠的小物体容易产生漏检
- 直接回归边界框有难度,回归误差较大,YOLO v2 开始使用锚框
- 对于小目标的检测效果可能比较差
3.SSD: Single Shot MultiBox Detector (2016)
(1)SSD思想
同期的另一个单阶段目标检测算法:
-
主干网络:使用 VGG + 额外卷积层,产生 11 级特征图
-
检测头:在 6 级特征图上,使用密集预测的方法,产生所有位置、不同尺度、所有锚框的预测结果
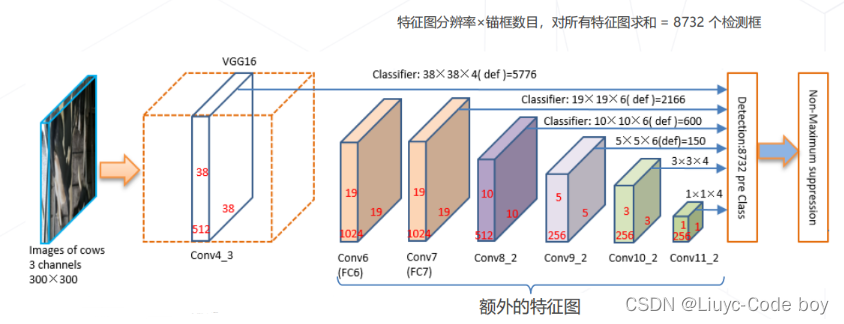
(2)SSD的损失函数:
训练 👈 为 8732 个锚框上的分类和回归预测计算损失
- 为每个预测值设定分类、回归设定真值
- 比对锚框和真值框的 IoU ,为每个锚框设定分类、回归真值
- 总损失 = 所有分类损失 + 所有正样本的边界框回归损失
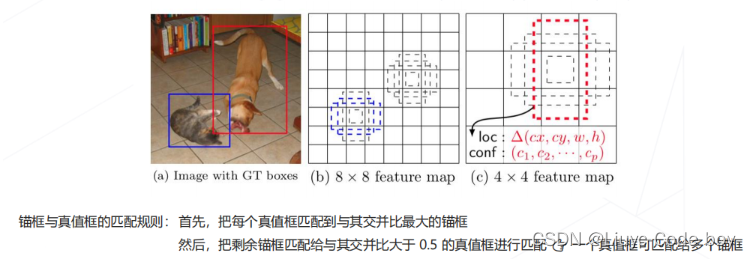
例如只有红色的锚框预测出来了是狗,那么就在这个锚框中计算狗这一类别的损失,其他锚框没有预测出来狗,就和背景这一类别计算损失,最后所有损失求和计算梯度更新参数。
(3)SSD正负样本不均衡问题
单阶段算法需要为每个位置的每个锚框预测一个类别,训练时需要为每个预测计算分类损失。图中锚框的数量远远大于真值框(数万 vs 数个),大量锚框的预测真值为背景(负样本)
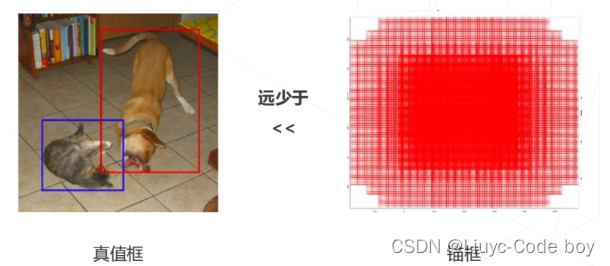
使用类别不平衡的数据训练出的分类器倾向给出背景预测,导致漏检(该区域应该有物体但是预测为背景)。朴素的分类损失不能驱动检测器在有限的能力下达到漏检和错检之间的平衡

(4)解决样本不均衡问题
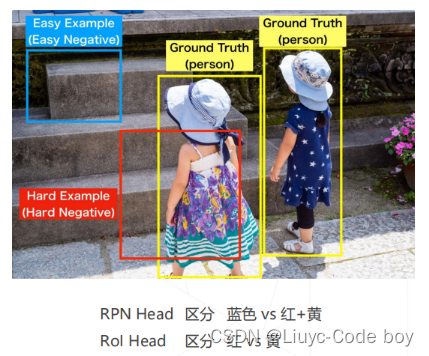
两阶段检测器通过区域提议拒绝了大量负样本,区域检测头接收的正负样本比例并不悬殊
单阶段检测器则需要专门处理样本不均衡问题
-
YOLO 正负样本使用不同的权重比例不悬殊时可以这样用
-
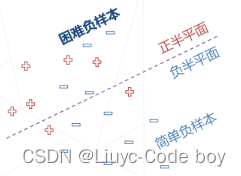
SSD 采用困难负样本挖掘(Hard Negative Mining)策略:
-
即,选取分类损失最大的部分负样本(困难负样本)计入损失,正负样本比例在 1:3
-
-
困难样本 = 分类器难以分类正确的样本 = loss 大的样本
-
负样本 = 真值为背景的样本
-
困难负样本 = 真值为背景,但被分类为前景,且置信度非常高的样本,可能是真值框周围但 IoU 并不高的候选框
-
-
-
“比较复杂、不太优雅”

(5)Focal Loss
由于原来分类任务的交叉熵损失函数在单阶段目标检测问题中无法起到比较好的效果,所以提出了Focal Loss,取得了更好的效果。
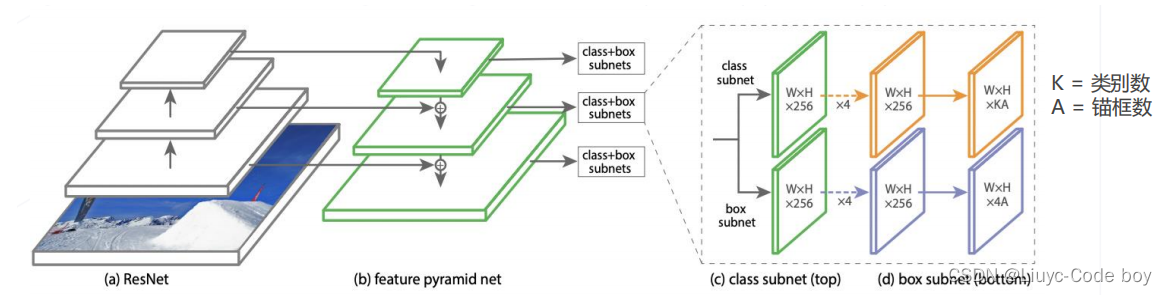
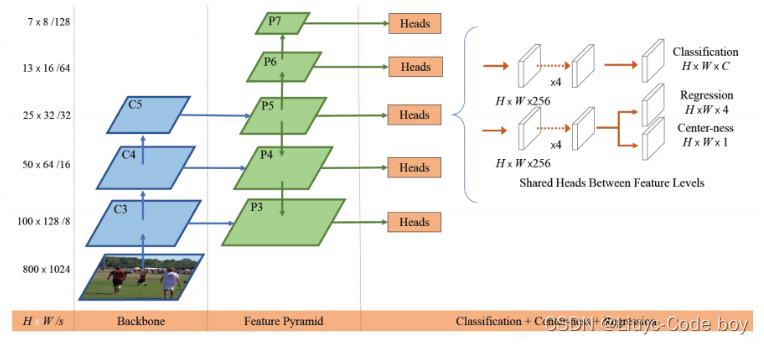
4.RetinaNet(2017)
基于 focal loss 的单阶段检测器
-
特征生成:ResNet 主干网络 + FPN 产生 P3~P7 共 5 级特征图,对应降采样率 8~128 倍
-
多尺度锚框:每级特征图上设置 3 种尺寸×3 种长宽比的锚框,覆盖 32~813 像素尺寸
-
密集预测头:两分支、5 层卷积构成的检测头,针对每个锚框产生 K 个二类预测以及 4 个边界框偏移量
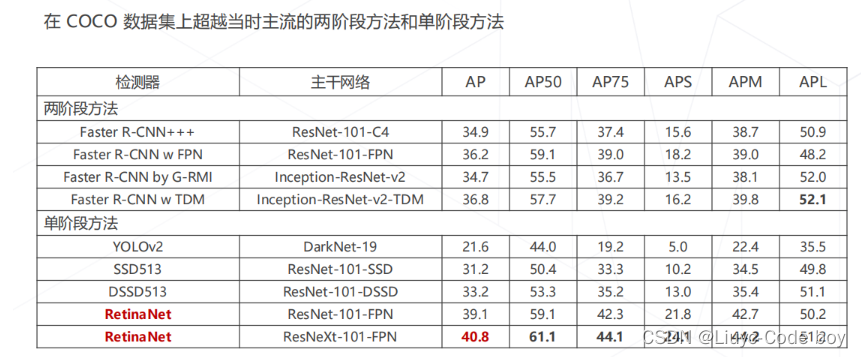
最终性能也是超过了Fast R-CNN的两阶段目标检测算法
之后又不断进化产生了YOLO V3~V8
七、无锚框目标检测算法
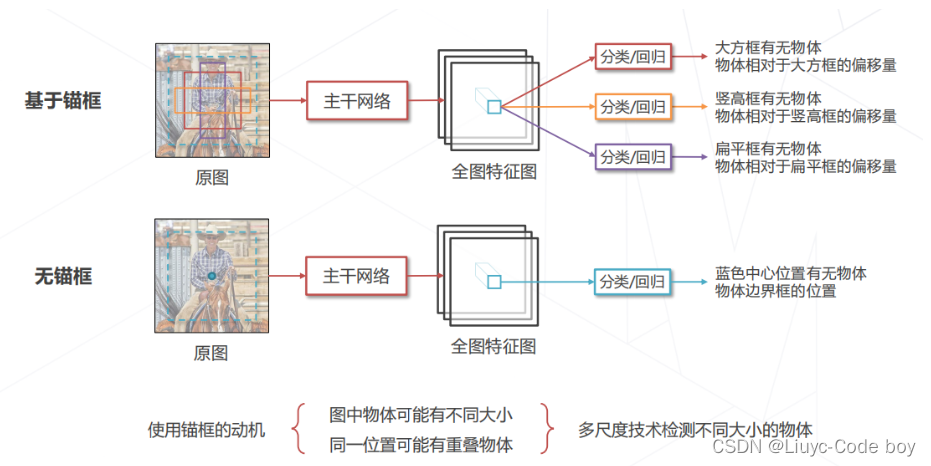
引入锚框是考虑到图像中的物体存在重叠,图中的物体存在不同的大小等等。而无锚框的目标检测算法:指的是我们直接基于特征去预测原图中真正的物体和我们的框中心有多少的偏移。
1.锚框 v.s. 无锚框
基于锚框(Anchor-based):
-
Faster R-CNN、YOLO v3 / v5、RetinaNet 都是基于锚框的检测算法
-
模型基于特征预测对应位置的锚框中是否有物体,以及精确位置相对于锚框的偏移量
-
需要手动设置锚框相关的超参数(如大小、长宽比、数量等),设置不当影响检测精度 ❌
无锚框(Anchor-free):
-
不依赖锚框,模型基于特征直接预测对应位置是否有物体,以及边界框的位置
-
边界框预测完全基于模型学习,不需要人工调整超参数 ✔️
-
YOLO v1 是无锚框算法,但由于提出时间较早,相关技术并不完善,性能不如基于锚框的算法
2.FCOS, Fully Convolutional One-Stage (2019)
由于多尺度检测技术的发展,我们知道虽然图像中可能有不同大小的物体,但是由于特征图随着深度的变化所表示的原图中图像的范围也是在时刻变化的,所以并不一定要使用锚框来进行目标检测。
-
特征生成:主干网络 + FPN 产生 P3~P7 共 5 级特征图,对应降采样率 8~128 倍
-
密集预测头:两分支、5 层卷积构成的密集预测头,对于每个位置,预测类别、边界框位置和中心度三组数值(与 Anchor-based 有所不同)
如下图所示,整个过程在FCOS中就是通过卷积来完成的。
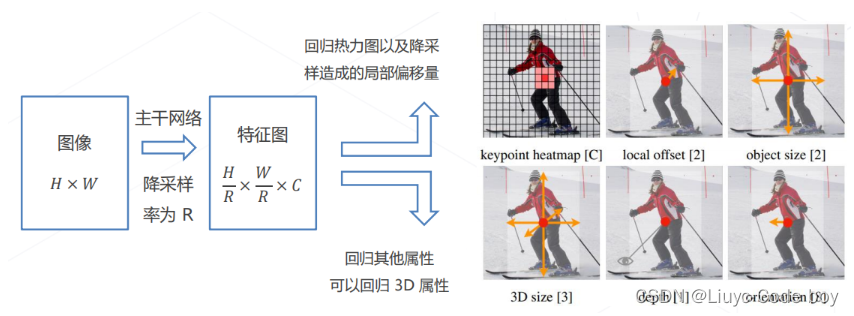
3.CenterNet (2019)
针对 2D 检测的算法,将传统检测算法中的“以框表示物体”变成“以中心点表示物体”,将 2D 检测建模为关键点检测和额外的回归任务,一个框架可以同时覆盖 2D 检测、3D 检测 、姿态估计等一系列任务。
-
将检测问题从框 -> 关键点+一些辅助信息
-
这个模型除了目标检测也可以解决一些其他问题
八、Detection Transformers
1.DETR(2020)
-
传统方法:在特征图上进行密集预测的范式,依赖 Anchor 设计、NMS 后处理等额外操作
-
DETR:脱离密集预测范式,将检测建模为从特征序列到框序列的翻译问题,用 Transformer 模型解决
-
DETR认为所有的框可以看成是一个序列的问题,特征也可以看作一系列的序列,所以定义了一个序列到序列的问题
-
DETR经常在工业质检的缺陷检测中用到
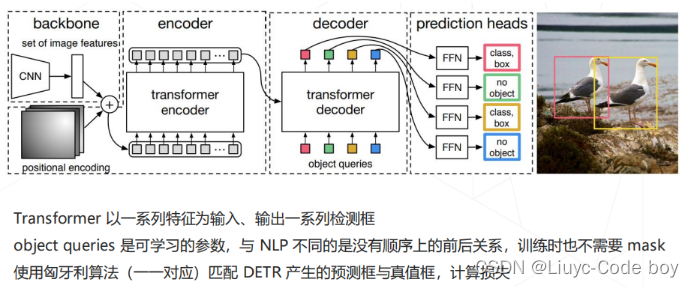
问题:慢!,由于attention聚焦到特定的特征上过程非常慢,所以整个DETR也是很慢的。
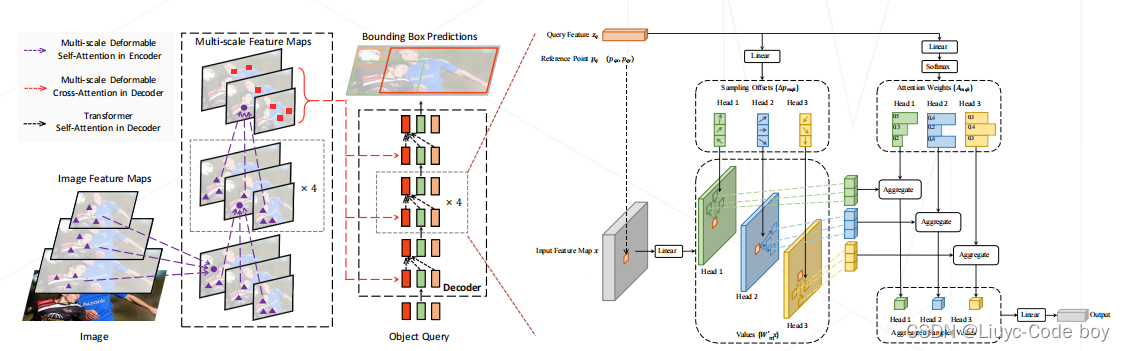
2.Deformable DETR (2021)
直接基于query的特征去关注图像的位置和权重,而不是用query、key、value做内积再去计算attention
-
DETR 的注意力机制收敛很慢,收敛 ≈ 注意力机制注意到特定的位置
-
Deformable DETR 借鉴 Deformable Conv 的方式,显示建模 query 注意的位置,收敛速度更快
九、目标检测模型的评估方法
这部分内容在机器学习相关知识有更详细的解释
1.检测结果的正确/错误类型
-
正确结果 (True Positive):算法检测到了某类物体 (Positive),图中也确实有这个物体,检测结果正确 (True)
-
假阳性 (False Positive):算法检测到了某类物体 (Positive),但图中其实没有这个物体,检测结果错误 (False)
-
假阴性 (False Negative):算法没有检测到物体 (Negative),但图中其实有某类物体,检测结果错误 (False)
-
检测到的衡量标准:对于某个检测框,图中存在同类型的真值框且与之交并比大于阈值(通常取0.5)

2.准确率 Precision 与 召回率 Recall
结合上面的TP、FP、FN我们就可以计算准确率和召回率
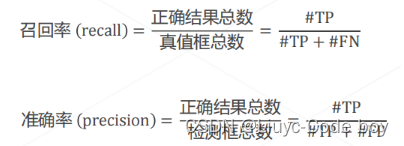
真值框总数与检测算法无关,因此只需将检测结果区分为 TP 和 FP 即可计算 recall 和 precision
准确率与召回率的平衡:
两种极端情况:
-
检测器将所有锚框都判断为物体:召回率≈100%,但大量背景框预测为物体,FP很高,准确率很低
-
检测器只输出确信度最高的1个检测框:以很大概率检测正确,准确率=100%,但因为大量物体被预测为背景,FN很高,召回率很低
一个完美的检测器应该有100%召回率和100%的精度;在算法能力有限的情况下,应该平衡二者
通常做法:将检测框按置信度排序, 仅输出置信度最高的若干个框
置信度 = 分类概率,或修正后的分类概率(YOLO、FCOS)
3.PR 曲线 与 AP 值
AP是PR曲线下方的面积,PR曲线越靠近右上方,说明预测效果越好。
子豪兄的补充
1.目标检测算法的改进思路
数据集:
- 数据集扩增(YOLO V5中的马赛克拼接)
骨干网络提取:
- 骨干网络中的三个部分都可以做相应修改
后处理:
- 各种后处理方法或者评价指标
针对小目标/密集目标进行改进
- 比如哪些部分开始用了后来不用了再后来又用了
- 比如Anchor
针对特定数据集:
- 添加一些人工标注的先验特征(人工构造的特征)来进行目标检测
相关文章:
OpenMMlab AI实战营第四期培训
OpenMMlab AI实战营第四期培训 OpenMMlab实战营第四次课2023.2.6学习参考一、什么是目标检测1.目标检测下游视觉任务2.图像分类 v.s. 目标检测 二、目标检测实现1.滑窗 Sliding Window2.滑窗的效率问题3.改进思路(1)消除滑窗中的重复计算(2&a…...

React轻松开发平台:实现高效、多变的应用开发范本
在当今快节奏的软件开发环境中,追求高效、灵活的应用开发方式成为了开发团队的迫切需求。React低代码平台崭露头角,为开发人员提供了一种全新的开发范式,让开发过程更高效、更灵活,从而加速应用程序的开发周期和交付速度。 1. 快…...
多域名SSL证书:保护多个网站的安全之选
什么是多域名SSL证书? 多域名SSL证书,顾名思义,是指一张SSL证书可以保护多个域名。与传统的单域名SSL证书相比,多域名SSL证书可以在一个证书中绑定多个域名,无需为每个域名单独购买和安装SSL证书。这样不仅可以节省成…...

HarmonyOS—HAP唯一性校验逻辑
HAP是应用安装的基本单位,在DevEco Studio工程目录中,一个HAP对应一个Module。应用打包时,每个Module生成一个.hap文件。 应用如果包含多个Module,在应用市场上架时,会将多个.hap文件打包成一个.app文件(称…...

金三银四,程序员如何备战面试季
金三银四,程序员如何备战面试季 一个人简介二前言三面试技巧分享3.1 自我介绍 四技术问题回答4.1 团队协作经验展示 五职业规划建议5.1 短期目标5.2 中长期目标 六后记 一个人简介 🏘️🏘️个人主页:以山河作礼。 🎖️…...

VUE3项目学习系列--项目配置(二)
在项目团队开发过程中,多人协同开发为保证项目格式书写格式统一标准化,因此需要进行代码格式化校验,包括在代码编写过程中以及代码提交前进行自动格式化,因此需要进行在项目中进行相关的配置使之代码格式一致。 一、eslint配置 …...
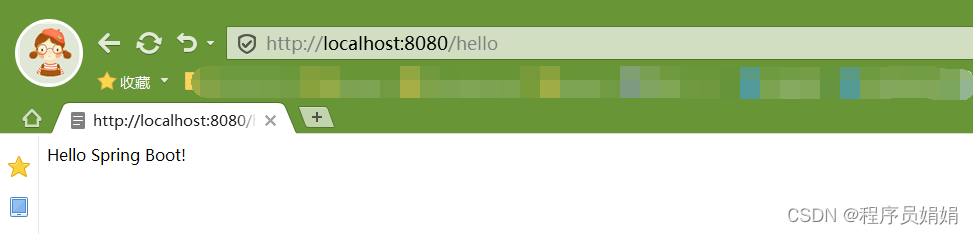
idea:springboot项目搭建
目录 一、创建项目 1、File → New → Project 2、Spring Initializr → Next 3、填写信息 → Next 4、web → Spring Web → Next 5、填写信息 → Finish 6、处理配置不合理内容 7、注意事项 7.1 有依赖包,却显示找不到依赖,刷新一下maven 二…...

如何保证某个程序系统内只运行一个,保证原子性
GetMapping("/startETL") // Idempotent(expireTime 90, info "请勿90秒内连续点击")public R getGaugeTestData6() {log.info("start ETL");//redis设置t_data_load_record 值为2bladeRedis.set("t_data_load_record_type", 2);Str…...

golang常见面试题
1. go语言有哪些优点、特性? 语法简便,容易上手。 支持高并发,go有独特的协程概念,一般语言最小的执行单位是线程,go语言支持多开协程,协程是用户态线程,协程的占用内存更少,协程只…...

探索Python编程世界:从入门到精通
一.Python 从入门到精通 随着计算机科学的发展,编程已经成为了一种必备的技能。而 Python 作为一种简单易学、功能强大的编程语言,越来越受到人们的喜爱。本文将为初学者介绍 Python 编程的基础知识,帮助他们踏入 Python 编程的大门…...
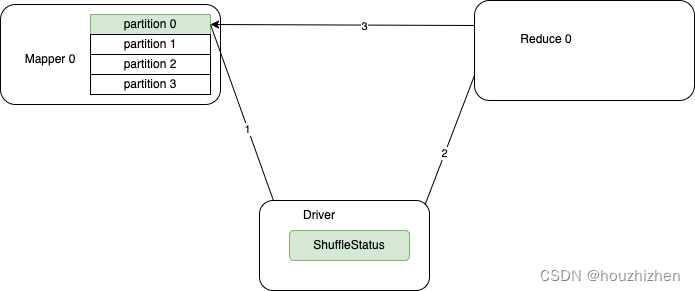
Spark Shuffle Tracking 原理分析
Shuffle Tracking Shuffle Tracking 是 Spark 在没有 ESS(External Shuffle Service)情况,并且开启 Dynamic Allocation 的重要功能。如在 K8S 上运行 spark 没有 ESS。本文档所有的前提都是基于以上条件的。 如果开启了 ESS,那么 Executor 计算完后&a…...
)
Docker 干货系列 (持续更新)
dive 直接用本地镜像名称来启动,不需要走 hub dive.sh IMAGE_NAME"${1}" TMP_FILE/tmp/dive-tmp-image.tar docker save "$IMAGE_NAME" > $TMP_FILE && dive $TMP_FILE --sourcedocker-archive && rm $TMP_FILE示例&#…...

一.jwt token 前后端的逻辑
摘要 jwt token 前后端的交互逻辑,此部分只描述了一些交互逻辑,不涉及到真实应用的开发。 token的格式 tokenheader‘.’payload‘.’sign 第一次登陆的时候 判断http请求头中是否包含Authorization不包含则提示用户未登录当用户登录后,…...
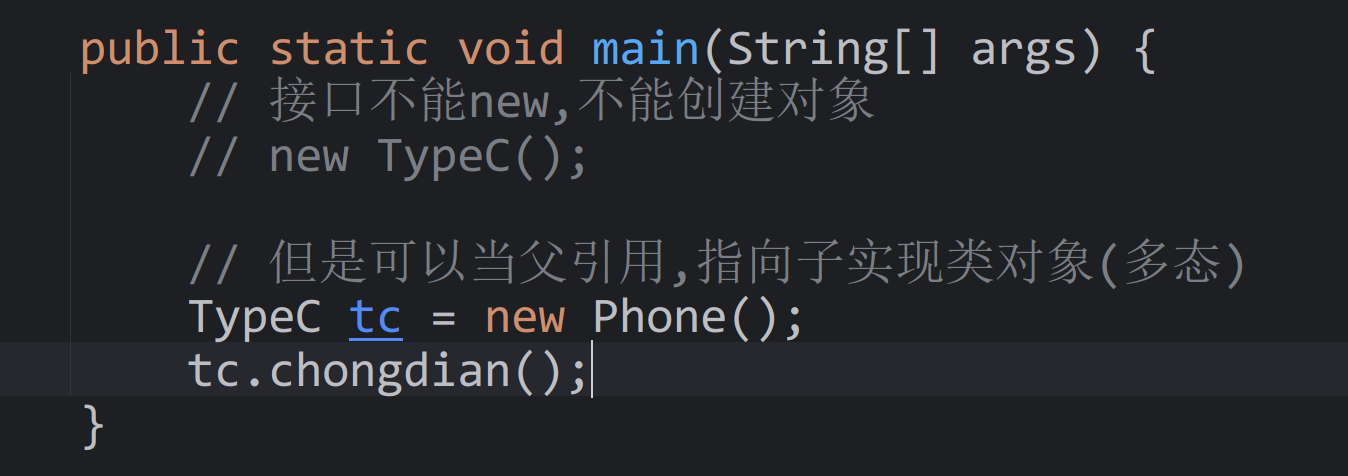
day12_oop_抽象和接口
今日内容 零、 复习昨日 一、作业 二、抽象 三、接口 零、 复习昨日 final的作用 修饰类,类不能被继承修饰方法,方法不能重写[重点]修饰变量/属性,变成常量,不能更改 static修饰方法的特点 static修饰的方法,可以通过类名调用 static修饰的属性特点 在内存只有一份,被该类的所有…...

linux 将 api_key设置环境变量里
vi ~/.bashrc在最后添加api_key的环境变量 export GEMINI_API_KEYAIza**********WvpX7FwbdM刷新配置 source ~/.bashrc使用python 读取环境变量 import os gemini_api_key os.getenv(GEMINI_API_KEY) print(gemini_api_key)...
java八股文复习-----2024/03/03
1.接口和抽象类的区别 相似点: (1)接口和抽象类都不能被实例化 (2)实现接口或继承抽象类的普通子类都必须实现这些抽象方法 不同点: (1)抽象类可以包含普通方法和代码块&#x…...
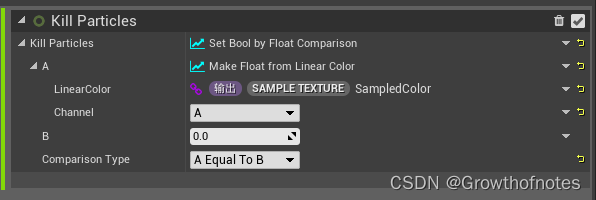
UE4 Niagara 关卡3.4官方案例解析
Texture sampling is only supported on the GPU at the moment.(纹理采样目前仅在GPU上受支持) 效果:textures can be referenced within GPU particle systems。this demo maps a texture to a grid of particles(纹理可以在GPU粒子系统中被引用这个演…...
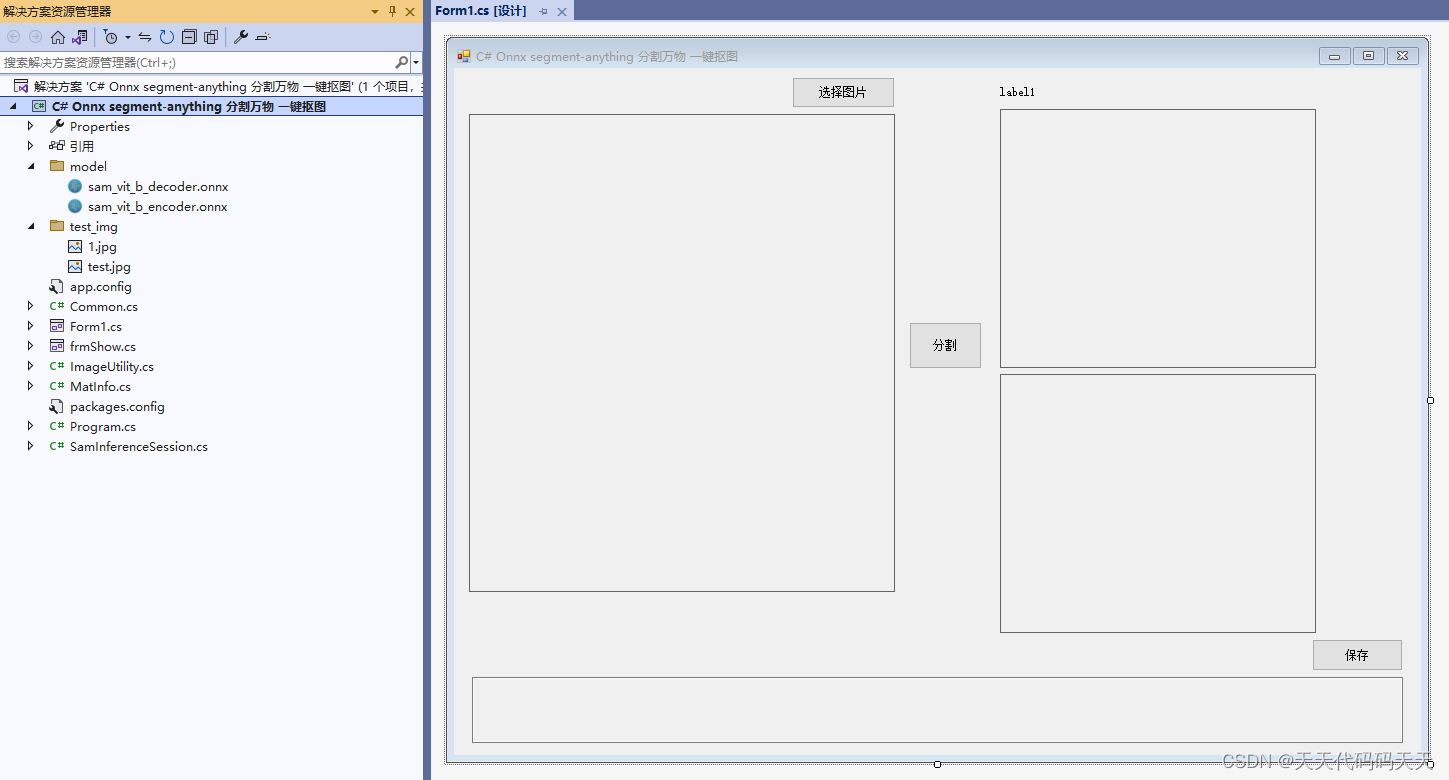
C# Onnx segment-anything 分割万物 一键抠图
目录 介绍 效果 模型信息 sam_vit_b_decoder.onnx sam_vit_b_encoder.onnx 项目 代码 下载 C# Onnx segment-anything 分割万物 一键抠图 介绍 github地址:GitHub - facebookresearch/segment-anything: The repository provides code for running infere…...
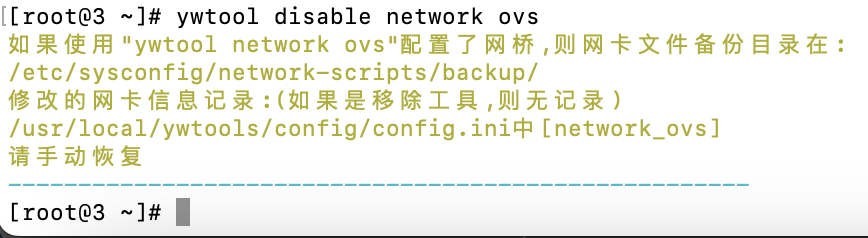
Linux配置网卡功能
提示:工具下载链接在文章最后 目录 一.network功能介绍二.配置network功能2.1 network_ip配置检查 2.2 network_br配置2.2.1 配置的网桥原先不存在检查2.2.2 配置的网桥已存在-修改网桥IP检查2.2.3 配置的网桥已存在-只添加网卡到网桥里检查 2.3 network_bond配置检查 2.4 netw…...
【C++】十大排序算法之 归并排序 快速排序
本次介绍内容参考自:十大经典排序算法(C实现) - fengMisaka - 博客园 (cnblogs.com) 排序算法是《数据结构与算法》中最基本的算法之一。 十种常见排序算法可以分为两大类: 比较类排序:通过比较来决定元素间的相对次序…...

OpenClaw模型对比测试:Phi-3-vision-128k与纯文本模型在图文任务表现
OpenClaw模型对比测试:Phi-3-vision-128k与纯文本模型在图文任务表现 1. 测试背景与动机 最近在搭建个人自动化工作流时,遇到了一个典型问题:当OpenClaw需要处理包含图片和表格的文档时,纯文本模型的表现总是不尽如人意。作为一…...

C++的std--ranges同步问题
C的std::ranges同步问题:现代C的并发挑战 随着C20引入std::ranges,开发者获得了更简洁、更强大的范围操作工具,但在多线程环境下,std::ranges的同步问题逐渐浮出水面。范围适配器、惰性求值和视图的组合虽然提升了代码的表达力&a…...

大子刊nc复现:连续介质中束缚态驱动下的平面手征超表面,展示最大和可调谐的三次谐波、本征手性B...
comsol三次谐波,本征手性BIC,远场偏振图,手性透射曲线,二维能带图,Q因子图,电场图,所见即所得 大子刊nc复现,在连续介质中束缚态驱动下具有最大和可调谐手征光学响应的平面手征超表面今天咱们来…...

《SpringBoot》史上最全SpringBoot相关注解介绍
在技术领域,我们常常被那些闪耀的、可见的成果所吸引。今天,这个焦点无疑是大语言模型技术。它们的流畅对话、惊人的创造力,让我们得以一窥未来的轮廓。然而,作为在企业一线构建、部署和维护复杂系统的实践者,我们深知…...

DuinoMemory:面向Arduino的轻量级嵌入式智能指针库
1. 项目概述DuinoMemory 是一款专为 Arduino 及资源受限嵌入式系统设计的轻量级智能指针库。它不依赖 STL、不使用异常(exceptions)、不启用 RTTI,完全以头文件形式提供(header-only),所有实现均通过 C 模板…...

Flowable 7.x 实战:手把手教你从前端按钮到后端接口,完整实现流程图查看功能
Flowable 7.x 实战:从前端按钮到后端接口的流程图查看全链路实现 在Spring Boot与Vue/React技术栈的企业级应用中,流程引擎的集成往往需要前后端协同完成功能闭环。本文将以查看流程图功能为切入点,完整呈现从权限控制到图像渲染的全链路实现…...

无痛人流三天能出门吗?术后出行与身体恢复科学指南
很多女性在无痛人流术后都会关心出行与恢复问题,其中 “无痛人流三天能出门吗” 是高频咨询内容。术后恢复不仅关系到短期舒适度,也影响生殖系统长期健康。结合临床护理经验与行业康复标准,本文对术后出行时机、注意事项及科学修护方式进行客…...

游戏盾导致 Unity/UE 引擎崩溃的主要原因排查?
做游戏上线的都知道,游戏盾是必装的——毕竟要防外挂、防攻击,不然刚上线就被搞崩,损失太大。但最近帮几个同行排查问题,发现好多项目接入游戏盾后,Unity和UE引擎动不动就崩,要么内存飙到爆,安卓…...

破局与重塑:大模型浪潮下机器学习工程师的生存指南
十字路口的困惑与机遇当大语言模型(LLM)与生成式AI(GenAI)以前所未有的速度席卷全球,身处技术浪潮中心的机器学习工程师们,正经历着一场深刻的职业震荡。曾经引以为傲的XGBoost、卷积神经网络(C…...

OFA图像描述系统实战:快速搭建图片转文字工具,避免常见权限错误
OFA图像描述系统实战:快速搭建图片转文字工具,避免常见权限错误 1. 项目介绍:让图片自己“说话”的智能工具 你有没有遇到过这样的场景?手头有一堆产品图片,需要为每张图配上文字描述,手动编写不仅耗时耗…...