【STM32+OPENMV】矩形识别
一、准备工作
有关OPENMV最大色块追踪及与STM32通信内容,详情见【STM32+HAL】与OpenMV通信
二、所用工具
1、芯片:STM32F103C8T6
2、CUBEMX配置软件
3、KEIL5
4、OPENMV
三、实现功能
寻找黑色矩形,并将最大矩形的四个边缘坐标发送给STM32
四、OpenMV IDE
1、寻找最大的矩形,并沿矩形边框绘制线条
# 寻找最大的矩形
# 沿矩形边框绘制线条
import sensor, image, time# 相机初始化
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE) # 设置图像格式为灰度
sensor.set_framesize(sensor.QQQVGA) # 设置图像大小
sensor.skip_frames(time=2000) # 等待设置生效
clock = time.clock() # 用于跟踪帧率while(True):clock.tick()img = sensor.snapshot().lens_corr(1.8)# 使用find_rects()方法寻找图像中的矩形rects = img.find_rects(threshold = 10000)# 初始化变量来存储最大矩形的信息max_area = 0max_rect = None# 遍历所有找到的矩形,找出面积最大的矩形for rect in rects:# 计算当前矩形的面积area = rect.w() * rect.h()# 如果当前矩形的面积大于之前记录的最大面积,则更新最大矩形和最大面积if area > max_area:max_area = areamax_rect = rect# 如果找到了最大的矩形,则绘制它的边框if max_rect:corners = max_rect.corners() # 获取最大矩形的四个角点# 绘制最大矩形的四条边for i in range(len(corners)):start_point = corners[i]end_point = corners[(i+1) % 4]img.draw_line(start_point[0], start_point[1], end_point[0], end_point[1], color = 255)print(corners) # 打印最大矩形的四个角点
2、完整通信+识别代码
# 寻找最大的矩形
# 沿矩形边框绘制线条
import sensor, image, time
import ustruct
from pyb import UART# 串口初始化
uart = UART(3, 115200, timeout_char=200)
uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters# 相机初始化
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE) # 设置图像格式为灰度
sensor.set_framesize(sensor.QQQVGA) # 设置图像大小
sensor.skip_frames(time=2000) # 等待设置生效
clock = time.clock() # 用于跟踪帧率def send_data(x):global uart;uart.write(bytearray([0xb3,0xb3]))uart.write(str(x))uart.write(bytearray([0x0d,0x0a]))while(True):clock.tick()img = sensor.snapshot().lens_corr(1.8)# 使用find_rects()方法寻找图像中的矩形rects = img.find_rects(threshold = 10000)# 初始化变量来存储最大矩形的信息max_area = 0max_rect = None# 遍历所有找到的矩形,找出面积最大的矩形for rect in rects:# 计算当前矩形的面积area = rect.w() * rect.h()# 如果当前矩形的面积大于之前记录的最大面积,则更新最大矩形和最大面积if area > max_area:max_area = areamax_rect = rect# 如果找到了最大的矩形,则绘制它的边框if max_rect:corners = max_rect.corners() # 获取最大矩形的四个角点# 绘制最大矩形的四条边for i in range(len(corners)):start_point = corners[i]end_point = corners[(i+1) % 4]img.draw_line(start_point[0], start_point[1], end_point[0], end_point[1], color = 255)send_data(corners)print(corners) # 打印最大矩形的四个角点
五、源码提供
【STM32+OPENMV】矩形识别资源
相关文章:

【STM32+OPENMV】矩形识别
一、准备工作 有关OPENMV最大色块追踪及与STM32通信内容,详情见【STM32HAL】与OpenMV通信 二、所用工具 1、芯片:STM32F103C8T6 2、CUBEMX配置软件 3、KEIL5 4、OPENMV 三、实现功能 寻找黑色矩形,并将最大矩形的四个边缘坐标发送给STM…...

在吗?腾讯云服务器优惠价格表曝光_2023年3月报价请过目!
腾讯云服务器多少钱一年?61元一年起,2核2G3M配置,腾讯云2核4G5M轻量应用服务器165元一年、756元3年,4核16G12M服务器32元1个月、312元一年,8核32G22M服务器115元1个月、345元3个月,腾讯云服务器网txyfwq.co…...
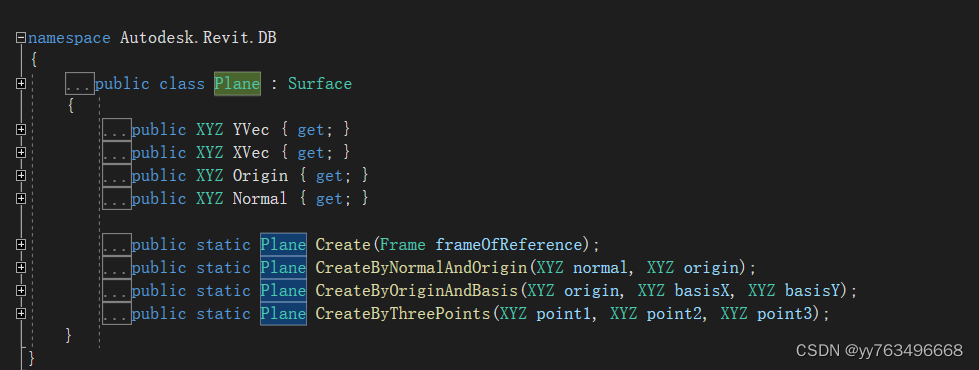
Revit-二开之创建Plane-(7)
2016版本的Plane 2017版本的Plane 2018版本及以上版本的Plane 由此可见2017版本是一个分水岭 #if REVIT2016Plane plane = new Plane(uiDoc.Document.ActiveView...

【操作系统学习笔记】文件管理1.2
【操作系统学习笔记】文件管理1.2 参考书籍: 王道考研 视频地址: Bilibili 文件的逻辑结构 无结构文件 文件内部的数据就是一系列的二进制流或字符流组成,又称流式文件,例如 .text 文件 有结构文件 由一组相似的记录组成,又称记录式文件…...

算法归纳【数组篇】
目录 二分查找1. 前提条件:2. 二分查找边界 2.移除元素有序数组的平方长度最小的子数组59.螺旋矩阵II54. 螺旋矩阵 二分查找 参考链接 https://programmercarl.com/0704.%E4%BA%8C%E5%88%86%E6%9F%A5%E6%89%BE.html#%E6%80%9D%E8%B7%AF 1. 前提条件: 数…...
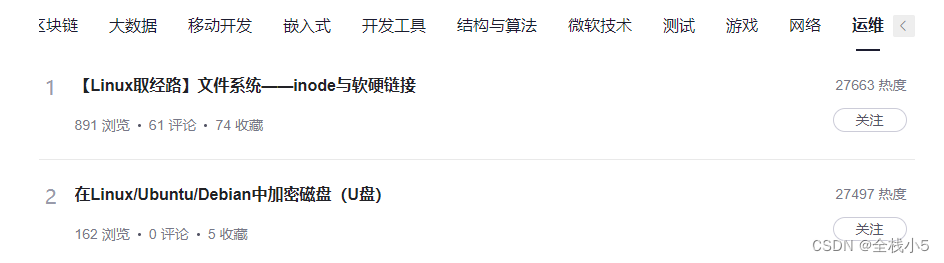
【随笔】程序员如何选择职业赛道,目前各个赛道的现状如何,那个赛道前景巨大
大家好,我是全栈小5,欢迎阅读文章! 此篇是【话题达人】系列文章,这一次的话题是《程序员如何选择职业赛道》 目录 背景热度柱状图赛道热度C/C云原生人工智能前沿技术软件工程后端JavaJavascriptPHPPython区块链大数据移动开发嵌入…...

进程之舞:操作系统中的启动、状态转换与唤醒艺术
✨✨ 欢迎大家来访Srlua的博文(づ ̄3 ̄)づ╭❤~✨✨ 🌟🌟 欢迎各位亲爱的读者,感谢你们抽出宝贵的时间来阅读我的文章。 我是Srlua,在这里我会分享我的知识和经验。&#x…...
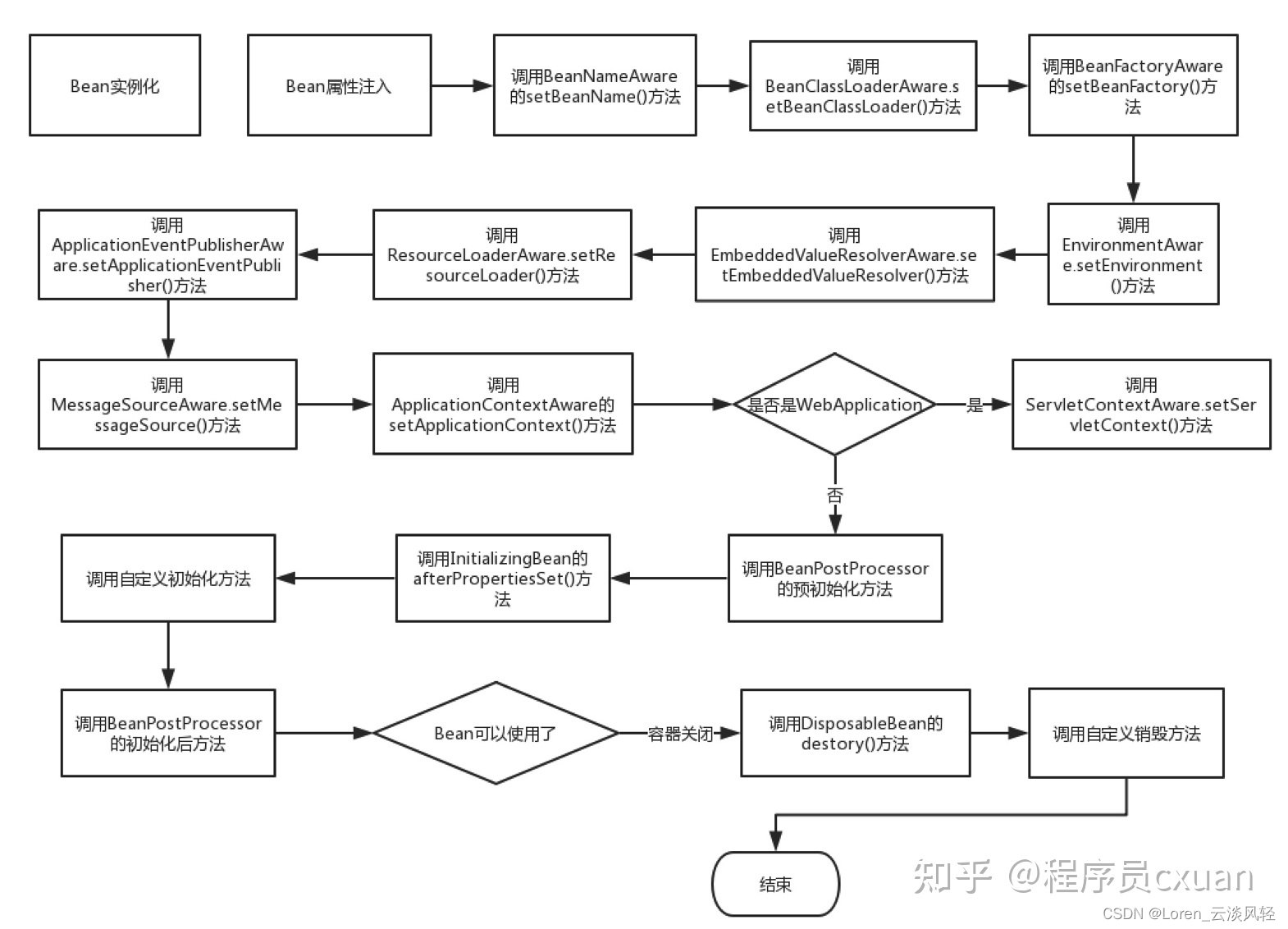
Java面试(4)之 Spring Bean生命周期过程
一, 整个加载的完整链路图 更详细的生命周期函数链路图(仅供参考) 二, Bean实例化的四种方式: 1, 无参构造器(默认且常用)6 2, 静态工厂方法方式(factory-method指定实例化的静态方法) 3, 实例工厂方法方式(factory-bean指定bean的name,factory-method指定实例化方法) 4, 实…...
-static修饰成员变量、应用场景,static修饰成员方法、应用场景)
JavaSE——面向对象高级一(1/4)-static修饰成员变量、应用场景,static修饰成员方法、应用场景
目录 static修饰成员变量 类变量的应用场景 static修饰成员方法 static修饰成员方法的应用场景 static 叫静态,可可以修饰成员变量、成员方法。 成员变量按照有无static修饰,分为两种: 类变量实例变量(对象的变量ÿ…...

轻量脚本语言Lua的配置与c++调用
文章目录 lua配置下载运行lua命令lua脚本的执行C++调用lua环境配置错误和警告测试c++程序lua脚本结果Lua是一种功能强大且快速的编程语言,易于学习和使用,并且可以嵌入到应用程序中。 Lua被设计成一种轻量级的可嵌入脚本语言。它被用于各种各样的应用程序,从游戏到web应用程…...
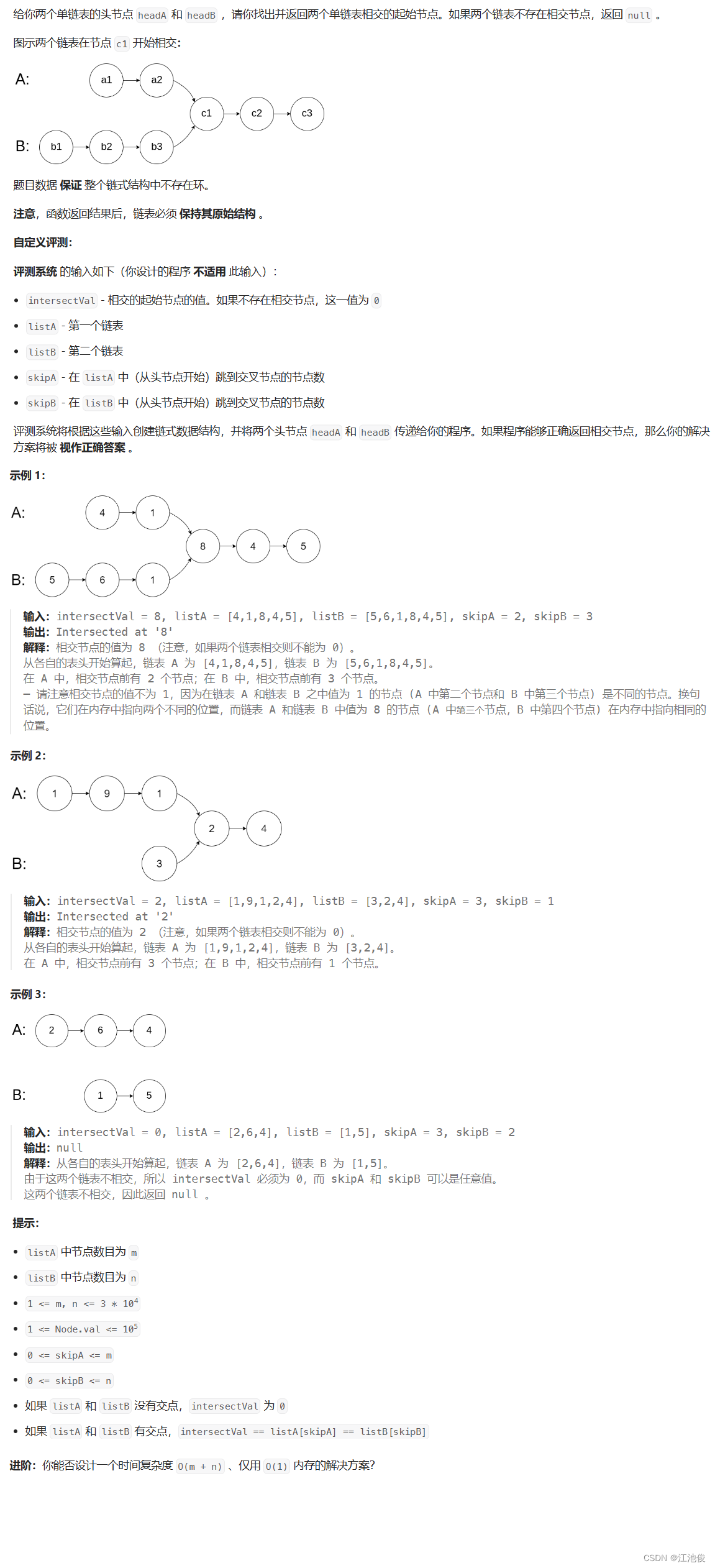
力扣每日一道系列 --- LeetCode 160. 相交链表
📷 江池俊: 个人主页 🔥个人专栏: ✅数据结构探索 ✅LeetCode每日一道 🌅 有航道的人,再渺小也不会迷途。 LeetCode 160. 相交链表 思路: 首先计算两个链表的长度,然后判断两个链…...

设计模式-建造者模式实践案例
建造者模式(Builder Pattern)是一种创建型设计模式,它提供了一种创建对象的最佳方式。当一个对象需要多个部分或许多步骤来创建,并且需要将创建过程与表示分离时,建造者模式非常有用。建造者模式旨在找到一个解决方案&…...

freeRTOS_20240308
1.使用ADC采样光敏电阻数值,如何根据这个数值调节LED灯亮度。 HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_3); while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */HAL_ADC_Start(&hadc);adc_val HAL_ADC_GetValue(&hadc);printf("adc_va…...

利用chatgpt写论文使用教程
ChatGPT是人工智能技术的一种,可帮助人们综合运用和分析各种语言技巧,从而优化实验结果、加速研究流程以及提高文章质量。以下是利用ChatGPT写论文的使用教程: 综上所述,利用ChatGPT写论文涉及到一些技巧和方法,需要合…...

SMiC矩阵将于3月6日正式上线,开启数字化经济新纪元
在数字化浪潮的推动下,全球瞩目的SMiC矩阵将于2024年3月6日正式上线。这一里程碑式的事件标志着数字化经济迈入了一个全新的时代,为思洣客、合作伙伴和整个经济生态带来了前所未有的机遇和挑战。 SMiC矩阵作为引领数字化经济的新力量,始终致…...

备战蓝桥杯---动态规划的一些思想2
话不多说,直接看题: 1.换根DP: 我们肯定不能对每一个根节点暴力求,我们不妨先求f[1],我们发现当他的儿子作为根节点时深度和为f[1](n-cnt[i])-cnt[i](cnt[i]表示以i为根的节点数),这样子两遍DFS…...
卫星导航 | 坐标系---地理坐标系与UTM坐标系
卫星导航 | 坐标系---地理坐标系与UTM坐标系 世界坐标系地理坐标系UTM坐标系 全球卫星导航系统(Global Navigation Satelite System,GNSS),简称卫星导航,是室外机器人定位的一个主要信息来源。 卫星导航能给机器人提供什么信息? 正常工作时&…...

JavaEE之volatile关键字
一.内存可见性问题 什么是内存可见性问题 计算机运行的程序/代码,往往需要访问数据。这些数据往往存在于内存中。 cup使用此变量时,就会把内存中的数据先读出来,加载到cpu寄存器中,再去参与运算。 但是,关键是cpu读…...

代码学习记录10
随想录日记part10 t i m e : time: time: 2024.03.03 主要内容:今天的主要内容是深入了解数据结构中栈和队列,并通过三个 l e e t c o d e leetcode leetcode 题目深化认识。 20. 有效的括号1047. 删除字符串中的所有…...
java——2024-03-03
String类的对象能被修改吗?如果不能需要用什么修改?StringBuilder和StringBuffer的区别?equals和区别谈谈对面向对象的理解重载和重写的区别说一下ArrayList,LinkedList底层实现以及区别什么是哈希冲突?hashMap和conCu…...

Stats与其他Go统计库对比分析:为什么选择这个无依赖解决方案
Stats与其他Go统计库对比分析:为什么选择这个无依赖解决方案 【免费下载链接】stats A well tested and comprehensive Golang statistics library package with no dependencies. 项目地址: https://gitcode.com/gh_mirrors/sta/stats 在Go语言生态系统中&a…...

SEO网站广告如何与本地化营销相结合
SEO网站广告与本地化营销的结合:如何提升本地企业的市场竞争力 在当今数字化经济的浪潮中,SEO网站广告和本地化营销已经成为企业营销的两大重要手段。如何将这两者有机地结合,以实现最大的营销效益,是许多企业面临的重要课题。本…...

WzComparerR2:解锁冒险岛游戏数据洞察的专业工具
WzComparerR2:解锁冒险岛游戏数据洞察的专业工具 【免费下载链接】WzComparerR2 Maplestory online Extractor 项目地址: https://gitcode.com/gh_mirrors/wz/WzComparerR2 想要深入探索《冒险岛》这款经典游戏的数据世界吗?WzComparerR2是您的专…...

OpenClaw技能扩展实战:安装Phi-3-vision-128k-instruct专用图文处理模块
OpenClaw技能扩展实战:安装Phi-3-vision-128k-instruct专用图文处理模块 1. 为什么需要专用技能模块? 上周我在整理技术文档时遇到一个典型场景:需要将十几份混杂着截图和文字说明的会议纪要,自动转换成结构化的Markdown文件。当…...

嵌入式AI开发实战:从MCU到模型部署全流程
1. 嵌入式AI开发实战:从入门到项目落地作为一名在嵌入式领域摸爬滚打多年的工程师,我深知AI技术给这个传统行业带来的变革。记得2018年第一次接触基于MCU的简单图像识别时,那种"原来嵌入式设备也能做AI"的震撼感至今难忘。如今&…...

MusePublic助力Java开发者:SpringBoot集成指南
MusePublic助力Java开发者:SpringBoot集成指南 1. 为什么Java团队需要MusePublic能力 最近帮一家电商公司做推荐系统升级时,技术负责人跟我聊起一个现实问题:他们用传统协同过滤算法生成的商品推荐列表,点击率已经连续三个季度停…...

OpenClaw+千问3.5-9B智能家居:自然语言控制HomeAssistant
OpenClaw千问3.5-9B智能家居:自然语言控制HomeAssistant 1. 为什么需要自然语言控制智能家居? 去年装修新房时,我安装了HomeAssistant系统来控制全屋灯光、空调和窗帘。虽然手机App能实现远程控制,但每次都要打开应用、找到对应…...

Exchange邮件批量删除工具有了网络版了
原有的<<Exchange邮件批量删除工具>>单机版现在已经更新为BS架构网络版,这样只要有网络就可以使用此系统了,方便随时应急。产品也启用了新名称为:MIRS邮件应急响应系统。此系统在几个有大型Exchange server部署的客户处使用效果很…...

电源管理入门-12 clock驱动
电源管理的两个大方面就是电压和时钟。 Clock 时钟就是 SoC 中的脉搏,由它来控制各个部件按各自的节奏跳动。比如,CPU主频设置,串口的波特率设置,I2S的采样率设置,I2C的速率设置等等。这些不同的clock设置,…...

Java程序员的云原生时代生存指南:面向软件测试从业者的专业视角
在技术浪潮的冲击下,云原生已从概念演进为产业标准。对于广大Java程序员而言,这既是挑战也是机遇。传统的技术栈和开发模式正在经历深刻变革,而软件测试作为保障质量的关键环节,其理念与实践也随之迭代。 一、 挑战审视ÿ…...