嵌入式 Linux进程间的通信--信号
目录
信号
信号的概述
信号类型
信号发送
1、kill 函数
2、raise函数
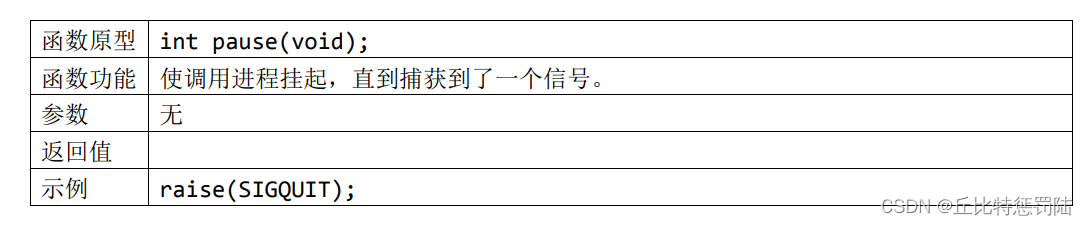
3、pause函数
信号处理
可以结合上一篇文章一起看:
嵌入式 Linux进程之间的通信_丘比特惩罚陆的博客-CSDN博客

信号
信号的概述
软中断信号(signal,又简称为信号)用来通知进程发生了异步事件。简单来说,信号就是 给进程发送命令。比如结束命令 CTRL+C ,让进程无条件结束运行。我们也可以通过给进程发送 命令,让它执行相应的操作,通过 signal 函数实现。
异步就是不需要特意等待某一信号到来,当信号来了时候(相当于软中断),会通知进程然后 执行相应操作。
注意,信号只是用来通知某进程发生了什么事件,并不给该进程传递任何数据。 进程对信号的处理:
(1)捕获信号并处理
(2)忽略信号 SIGKILL SIGSTOP
(3)接收默认处理
在进程表的表项中有一个软中断信号域,该域中每一位对应一个信号,当有信号发送给进程时, 对应位置位。由此可以看出,进程对不同的信号可以同时保留,但对于同一个信号,进程并不知道 在处理之前来过多少个。
信号类型


信号发送
1、kill 函数

2、raise函数

3、pause函数
信号处理
当系统捕捉到某个信号时,可以忽略该信号或者用指定的函数处理,或者使用系统默认的方式。 信号处理的方式主要有两种,一种是使用简单的 signal 函数,另外一种是使用信号集函数组 sigaction。
| 函数原型 | sighandler_t signal(int signum, sighandler_t handler); |
| 功能 | 信号的处理 |
| 参数 | signum:指明要处理的信号,它可以取除了 SIGKILL 和 SIGSTOP 外的任何一种信号 handler:描述了与信号关联的动作, 取值可以是以下三种: ② 函数地址:接收到对应的信号,就跳转到指定中断; ② SIG_IGN:忽略该信号; ③ SIG_DFL:采用系统默认处理; |
| 返回值 | 返回先前的信号处理函数指针,如果有错误则返回 SIG_ERR(-1) |
| 例程 |
#include <signal.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>void my_func(int sign_no)
{if(sign_no==SIGINT)printf("I have get SIGINT\n");else if(sign_no==SIGQUIT)printf("I have get SIGQUIT\n");
}
int main()
{
printf("Waiting for signal SIGINT or SIGQUIT \n ");/*注册信号处理函数*/
signal(SIGINT, my_func); /*CTRL -C*/
signal(SIGQUIT, my_func);/*CTRL -\*/
signal(SIGCHLD, SIG_IGN);/*SIGCHLD --子进程结束信号*/
pause(); /*将进程挂起,知道有信号才退出*/
exit(0);
}相关文章:
嵌入式 Linux进程间的通信--信号
目录 信号 信号的概述 信号类型 信号发送 1、kill 函数 2、raise函数 3、pause函数 信号处理 可以结合上一篇文章一起看: 嵌入式 Linux进程之间的通信_丘比特惩罚陆的博客-CSDN博客 信号 信号的概述 软中断信号(signal,又简称为…...
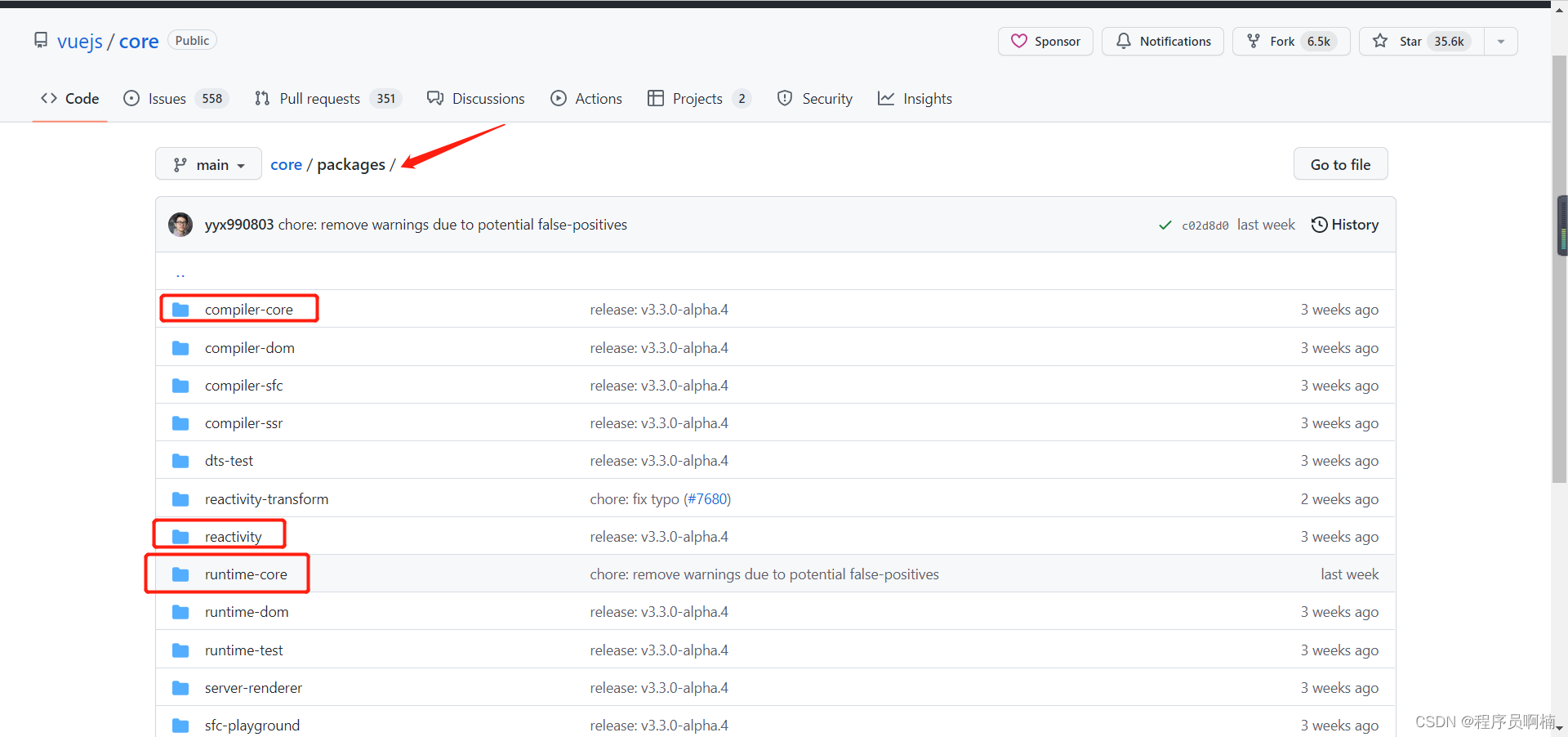
Vue3 核心模块源码解析(中)
【Vue3 核心模块源码解析(上)】讲到了 Vue2 与 Vue3的一些区别,Vue3 新特性的使用,以及略微带了一点源码。那么这篇文章就要从Vue3 模块源码解析 与 Vue3 执行逻辑解析这两个方面去给大家剖析 Vue3 的深层次,一起学习起来吧! 这里…...
| 含思路)
华为OD机试题 - 剩余可用字符集(JavaScript)| 含思路
华为OD机试题 最近更新的博客使用说明本篇题解:剩余可用字符集题目输入输出示例一输入输出说明Code解题思路华为OD其它语言版本最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全…...

焦虑的根源
归结起来,焦虑的原因就两条:想同时做很多事,又想立即看到效果。王小波说:人的一切痛苦,本质上都是对自己无能的愤怒。焦虑的本质也契合这一观点:自己的欲望大于能力,又极度缺乏耐心。焦虑就是因为欲望与能力之间差距过大。再往深了…...

1.认识网络爬虫
1.认识网络爬虫网络爬虫爬虫的合法性HTTP协议请求与响应(重点)网络爬虫 爬虫的全名叫网络爬虫,简称爬虫。他还有其他的名字,比如网络机器人,网络蜘蛛等等。爬虫就好像一个探测机器,它的基本操作就是模拟人的行为去各个网站溜达&am…...

【论文速递】WACV 2023 - 一种全卷积Transformer的医学影响分割模型
【论文速递】WACV 2023 - 一种全卷积Transformer的医学影响分割模型 【论文原文】:The Fully Convolutional Transformer for Medical Image Segmentation 【作者信息】:Athanasios Tragakis, Chaitanya Kaul,Roderick Murray-Smith,Dirk Husmeier 论…...
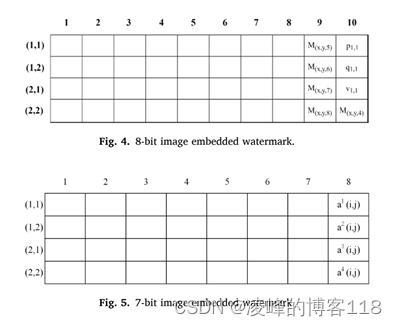
加密图像的脆弱水印及应用
原文题目:《A self-embedding secure fragile watermarking scheme with high quality recovery》 学习笔记: 应用场景 为了确保图像在传输过程中不被损坏,在将原始图像发送到云端之前,将用于篡改检测和恢复的水印嵌入到原始图像…...
python线上商城网站项目前台和后台源码
wx供重浩:创享日记 对话框发送:python51 获取完整源码源文件说明文档配置教程等 1、网站前台 在虚拟环境中启动程序后,使用浏览器访问“http://127.0.0.1:5000”即可进入网站前台首页。如图1所示。 单击首页左上角“注册”按钮,进…...
PowerShell 实现企业微信机器人推送消息
前言企业微信机器人 在ARMS告警管理中创建企业微信机器人后,您可以在通知策略中指定对应的企业微信群用于接收告警。当通知策略的匹配规则被触发时,系统会自动向您指定的企业微信群发送告警通知。企业微信群收到通知后,您可以在企业微信群中…...

IDEA集成Git就是这么简单
IDEA集成Git 文章目录IDEA集成Git配置Git环境配置Git的忽略文件①为什么需要配置忽略文件?②配置忽略文件③引用配置文件配置IDEA初始化项目添加到暂存区方式一:方式二:移除暂存区提交到本地库分支创建分支切换分支版本穿梭配置Git环境 配置…...

springBoot 事务基本原理
springBoot事务基本原理是基于spring的BeanPostProcessor,在springBoot中事务使用方式为: 一、在启动类上添加注解:EnableTransactionManagement 二、在需要事务的接口上添加注解:Transactional 基本原理: 注解&am…...

HBuilderX无线连接真机
说明 安装的是HBuilderX,不是HBuilder,adb.exe所在目录是 x:\HBuilderX\plugins\launcher\tools\adbs\ 里面可能有其他版本,用哪个都,建议使用最新的 配置 首先,将真机使用USB连接到电脑上。 在adb目录中启动命令…...

idea初学笔记
注:初学需安装idea专业版,方便学习使用idea运行内存配置从eclipse工具开发 转 idea工具开发,可设置idea快捷键同eclipse快捷键 file -> Settings -> Keymap -> 选择Eclipse -> OK设置idea项目整体编码格式file -> Settings -> Editor …...

C++核心编程<类和对象>(4)
C核心编程<类和对象>4.类和对象4.1封装4.1.1封装的意义封装的意义1封装的意义24.1.2struct和class区别4.1.3成员属性设置为私有4.2对象的初始化和清理4.2.1构造函数和析构函数1.1构造函数语法:类名(){}1.2析构函数语法: ~类名(){}4.2.2构造函数的分…...

编写http workshop脚本从网页缓存里解析音乐
前一篇文章 编写http workshop脚本从网站下载音乐 示范了如何使用HttpClient访问API,以及Json数据的解析; 今天我们通过解析一个网页展示如何使用内置的LibXml2的功能解析HTML,提取我们关心的内容。 这里随便搜了2个资源类的网站,竟然使用的格式是一模一样的: https://www…...

当数字孪生遇上轨道交通,会有什么新发展?
轨道交通是城市间互通互联的命脉,是当下人们出行的首要选择之一,也是我国“新基建”的重点建设对象。将城轨交通各链路系统及多类型服务,与空间感知、移动互联、云计算等技术深度融合,集中实现城市空间、城轨分布、城轨运行动态的…...

原理底层计划--分布式事务
分布式事务 mysql事务 我们通过show engines查询存储引擎,mysql一般为innodb, 为什么? 因为innodb支持事务是原因之一。 特性无非ACID 原子性,一致性,隔离性,持久性 一致性是最后追求的结果,也就保证了数…...

Hive总结
文章目录一、Hive基本概念二、Hive数据类型三、DDL,DML,DQL1 DDL操作2 DML操作3 DQL操作四、分区操作和分桶操作1、分区操作2、分桶操作五、Hive函数六、文件格式和压缩格式一、Hive基本概念 Hive是什么? Hive:由 Facebook 开源用于解决海量结构化日志的…...

docker环境下安装jenkins
前言 差点被Jenkins的插件搞麻了,又是依赖不对又是版本需要升级的,差点破口大骂了,还好忍住了,静下心来慢慢搞,终于搞通了。这里必须记录一下。 废话不多说,上来就是干,jenkins是干嘛用的&…...

Shifu基础功能:设备接入
如何修改设备接入的配置 1. 编辑edgedevice.yaml文件 接入设备前,您需要对edgedevice.yaml文件进行编辑。对于不同的协议,protocolSettings可根据协议进行进一步配置,详细配置请前往Shifu API参考。 ... connection: Ethernet address: …...
做WiFi遥控小车,我踩过的那些坑)
保姆级避坑指南:用STM32F103C8T6+ESP8266(AT指令)做WiFi遥控小车,我踩过的那些坑
STM32F103C8T6ESP8266 WiFi遥控小车避坑实战手册 1. 硬件选型与连接:那些容易被忽视的细节 在开始任何代码编写之前,硬件连接的正确性往往决定了项目的成败。使用STM32F103C8T6(俗称"蓝莓板")与ESP8266模块组合时&#…...

Redis分布式锁进阶第二十二篇拆解
一、本篇前置衔接 第九十二篇我们完成Redisson源码拆解、手写复刻、底层内核穿透,彻底明白分布式锁代码层、脚本层、线程层原理。到此为止,代码、源码、坑点、运维、监控、面试全部讲透。但很多开发最大的困惑依旧存在:不同体量公司为什么锁架…...

3步玩转APK下载:开源APKMirror客户端的终极实战指南
3步玩转APK下载:开源APKMirror客户端的终极实战指南 【免费下载链接】APKMirror 项目地址: https://gitcode.com/gh_mirrors/ap/APKMirror 你是否曾因官方应用商店找不到某个历史版本而苦恼?是否担心第三方下载站点的安全性?今天&…...

MEMS传感器机械臂姿态检测【附代码】
✨ 长期致力于MEMS传感器、机械臂、惯性测量单元、数据融合、姿态检测系统研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)设计基于ICM20948的惯性测量…...
)
别再满世界找Kettle了!手把手教你定位最新官方下载源(附版本选择建议)
开源工具下载困境突围指南:以Kettle为例构建高效溯源方法论 在开源工具的使用过程中,最令人头疼的莫过于某天突然发现熟悉的下载链接失效,官网改版后找不到下载入口,或是搜索引擎返回的结果全是过时的教程。这种情况不仅发生在Ke…...

AI教材写作必备:低查重工具,助力高效生成专业教材!
选择 AI 教材编写工具的困境与解决方案 在准备教材之前,选择合适的工具就像进入了一个“纠结的大迷宫”!使用办公软件确实方便,但功能往往太过基础,搭建框架和调整格式都得手动搞定;而如果选择专业的 AI 教材编写工具…...

Windows终极优化神器:三分钟让Windows焕然一新
Windows终极优化神器:三分钟让Windows焕然一新 【免费下载链接】winutil Chris Titus Techs Windows Utility - Install Programs, Tweaks, Fixes, and Updates 项目地址: https://gitcode.com/GitHub_Trending/wi/winutil 你是否厌倦了每次重装系统后繁琐的…...

Unity 2019.4.7f1实战:从零复刻Flappy Bird,搞定PC/Web/Android三端发布
Unity 2019.4.7f1实战:从零复刻Flappy Bird,搞定PC/Web/Android三端发布 当你第一次打开Unity时,面对那个空荡荡的3D场景,可能会有些不知所措。但别担心,今天我们就用这个看似简单的Flappy Bird游戏,带你走…...

激光雷达距离传感器:智能感知时代的“千里眼“
在万物互联的智能时代,激光雷达距离传感器正以厘米级的精准测距能力,重塑自动驾驶、机器人导航与智慧城市的感知边界。它不仅是一款传感器,更是智能系统的"第三只眼"——看得远、看得清、看得准。一、硬核原理:光速丈量…...

087、机器人运动学:雅可比矩阵
087、机器人运动学:雅可比矩阵 一、一个让我熬夜三天的调试故事 去年做六轴协作机器人末端力控的时候,遇到一个诡异的问题:机器人末端在某个位姿下,明明关节速度指令给得很平滑,末端速度却突然跳变,导致力控震荡。当时我盯着示波器上的速度曲线,百思不得其解——运动学…...