如何学习、上手点云算法(三):用VsCode、Visual Studio来debug基于PCL、Open3D的代码
写在前面
-
本文内容
以PCL 1.14.0,Open3D0.14.1为例,对基于PCL、Open3D开发的代码进行源码debug;
如何学习、上手点云算法系列:
如何学习、上手点云算法(一):点云基础
如何学习、上手点云算法(二):点云处理相关开源算法库、软件、工具
如何学习、上手点云算法(三):用VsCode、Visual Studio来debug基于PCL、Open3D的代码
更多点云基础、算法相关内容请关注专栏:
点云处理基础
点云配准(PointCloud Registration)
Open3D点云处理
PCL点云处理
点云算法 -
平台/环境
Windows10, CMake, Open3D, PCL -
转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/136504094
目录
- 写在前面
- PCL
- 准备
- 编译debug版本
- 配置launch.json
- Visual Studio
- Open3D
- 准备
- 添加open3d测试
- 调试
- 参考
- 完
PCL
准备
安装PCL1.14.0: PCL1.14.0安装、使用教程
VsCode配置PCL: VsCode配置PCL、Open3D自动补全
在此基础上,下载debug需要的pdb文件:https://github.com/PointCloudLibrary/pcl/releases
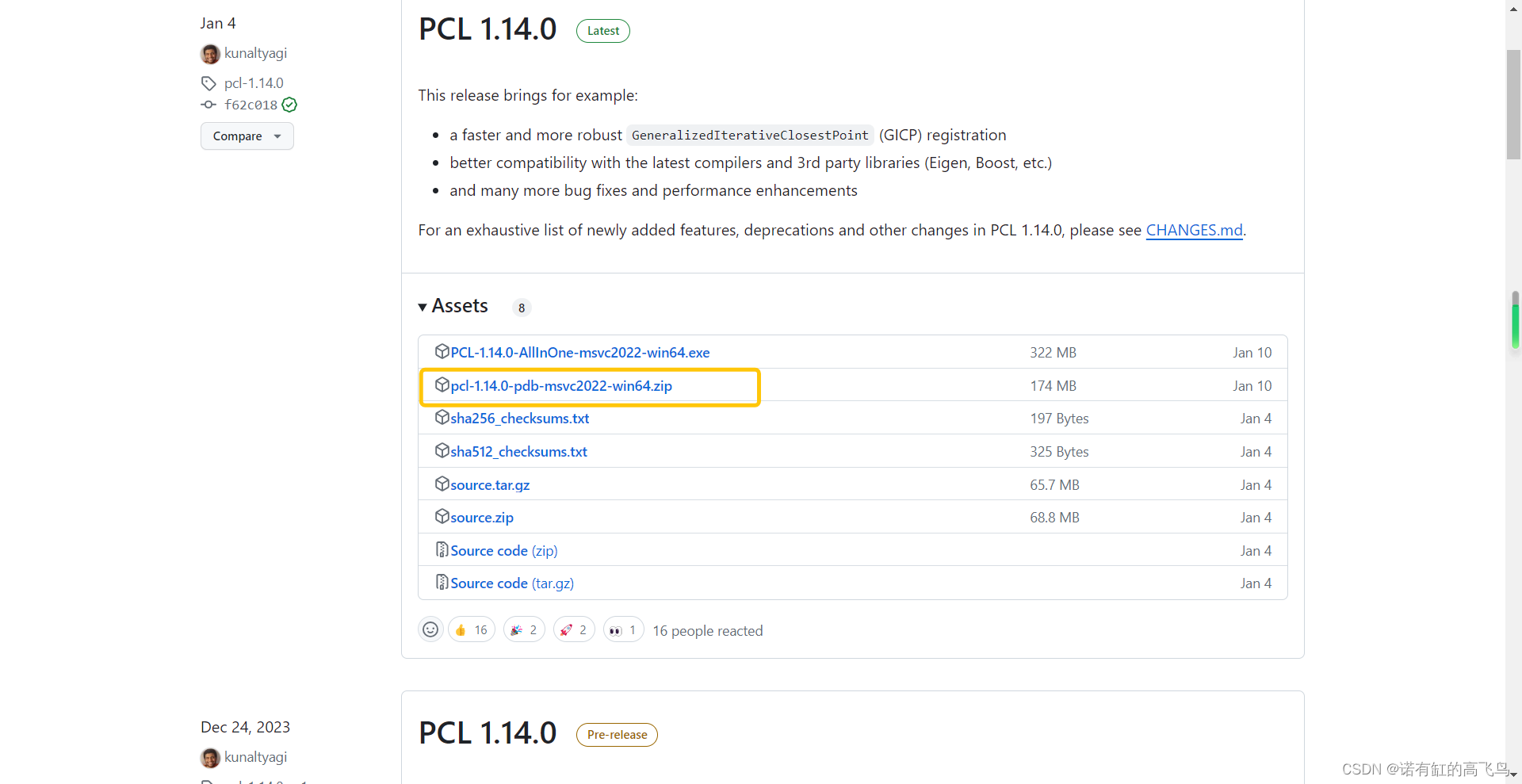
打开压缩包
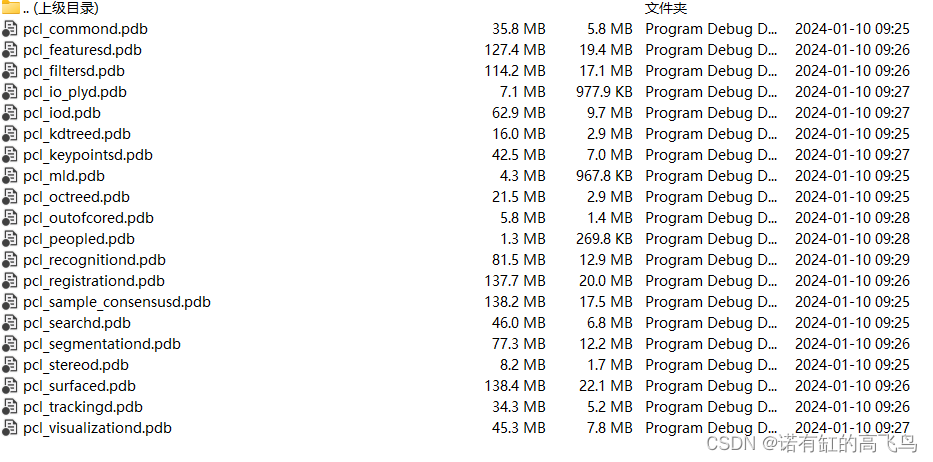
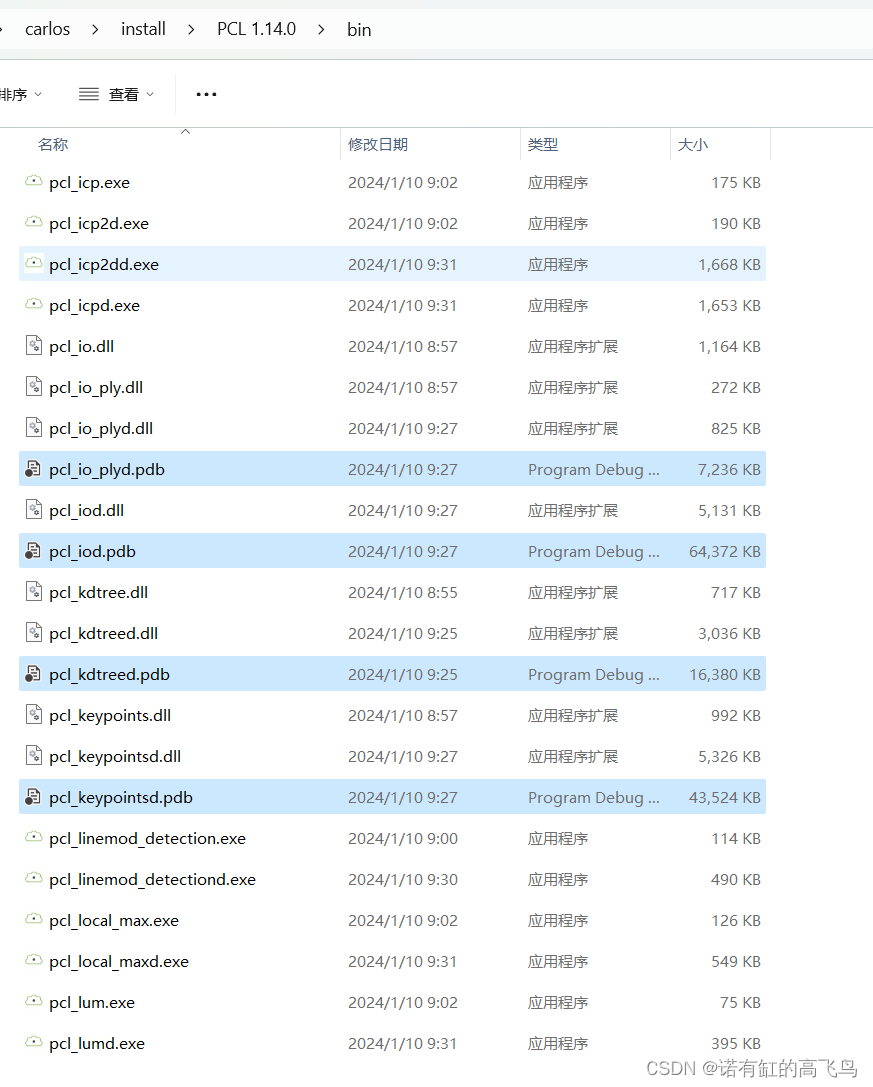
将pdb文件复制到之前装PCL的bin路径下,我这里是
D:\carlos\install\PCL 1.14.0\bin
注:PDB文件的作用见vs2019配置opencv+contrib-440 + PCL1.10.0 + 源码单步调试
编译debug版本
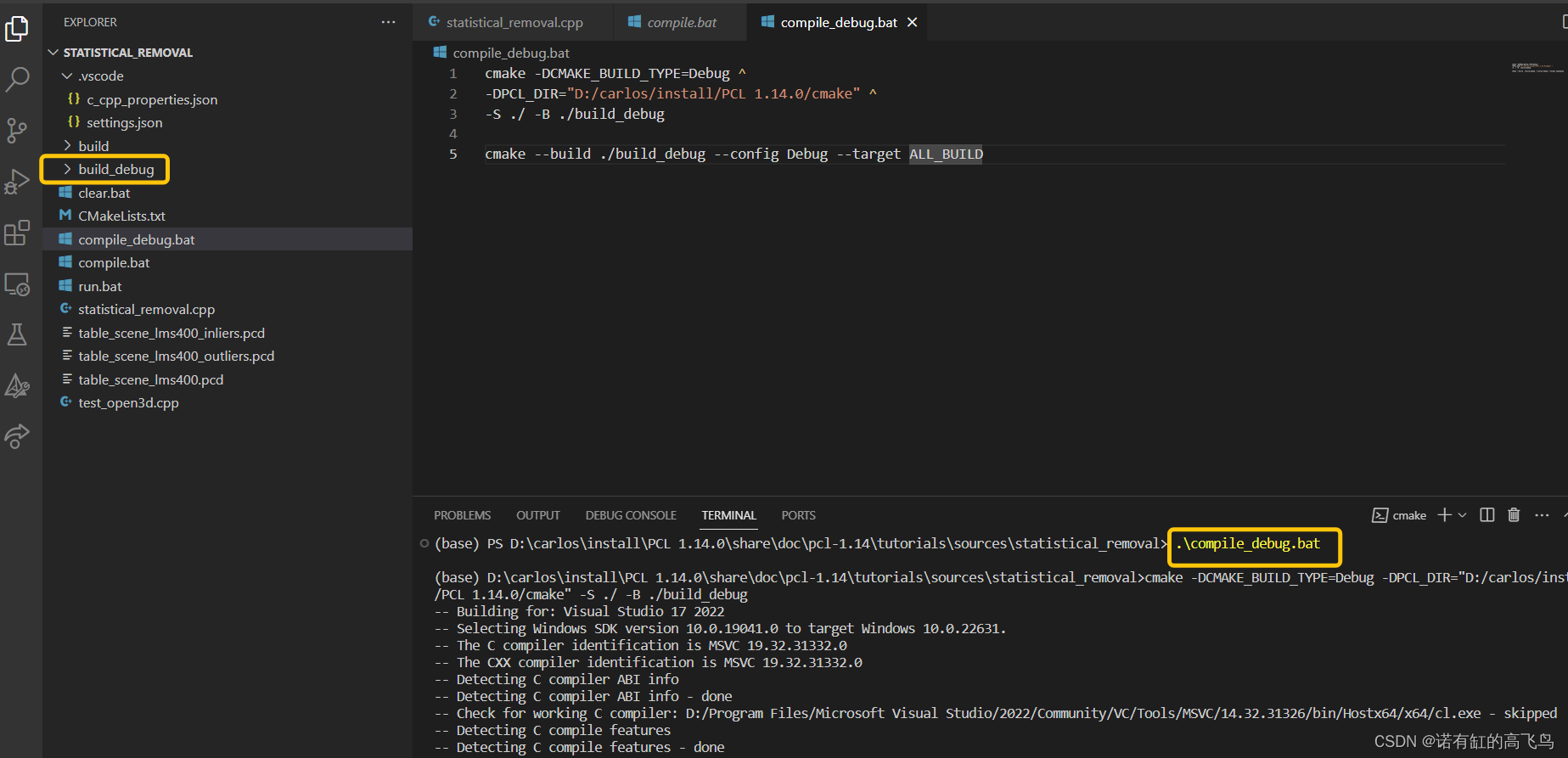
在VsCode配置PCL、Open3D自动补全和的基础上,新建一个compile_debug.bat:
cmake -DCMAKE_BUILD_TYPE=Debug ^
-DPCL_DIR="D:/carlos/install/PCL 1.14.0/cmake" ^
-S ./ -B ./build_debugcmake --build ./build_debug --config Debug --target ALL_BUILD
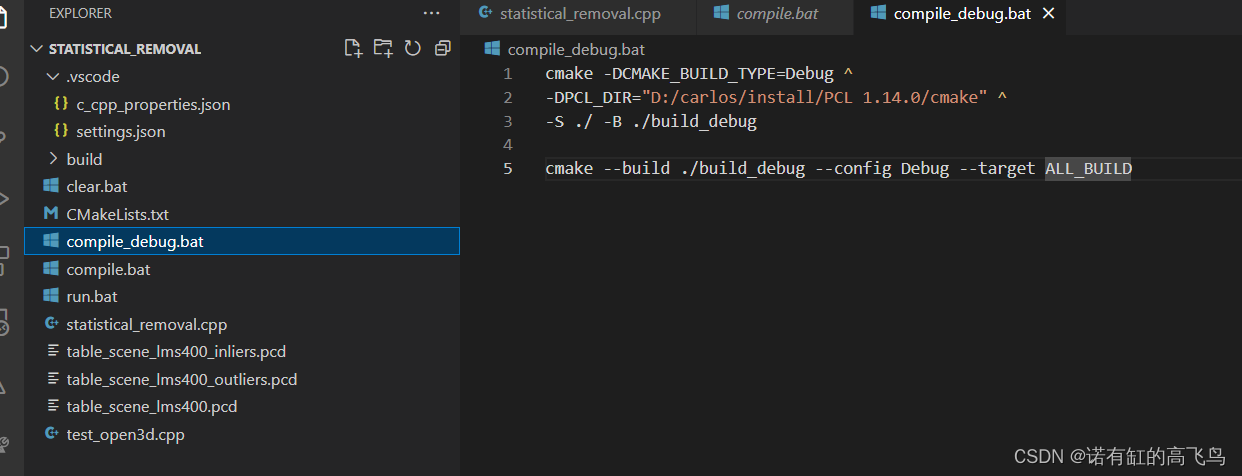
然后使用compile_debug.bat进行编译,完了会自动生成build_debug
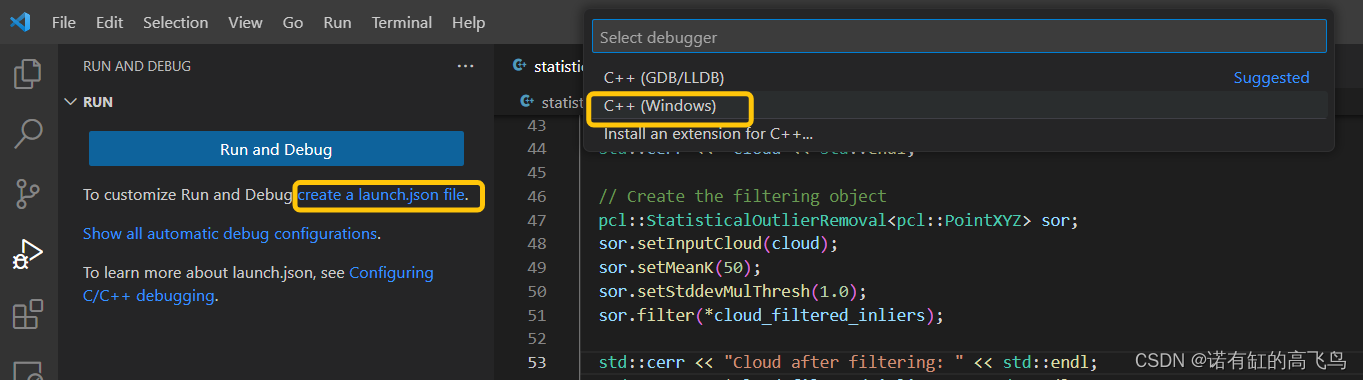
配置launch.json
创建launch
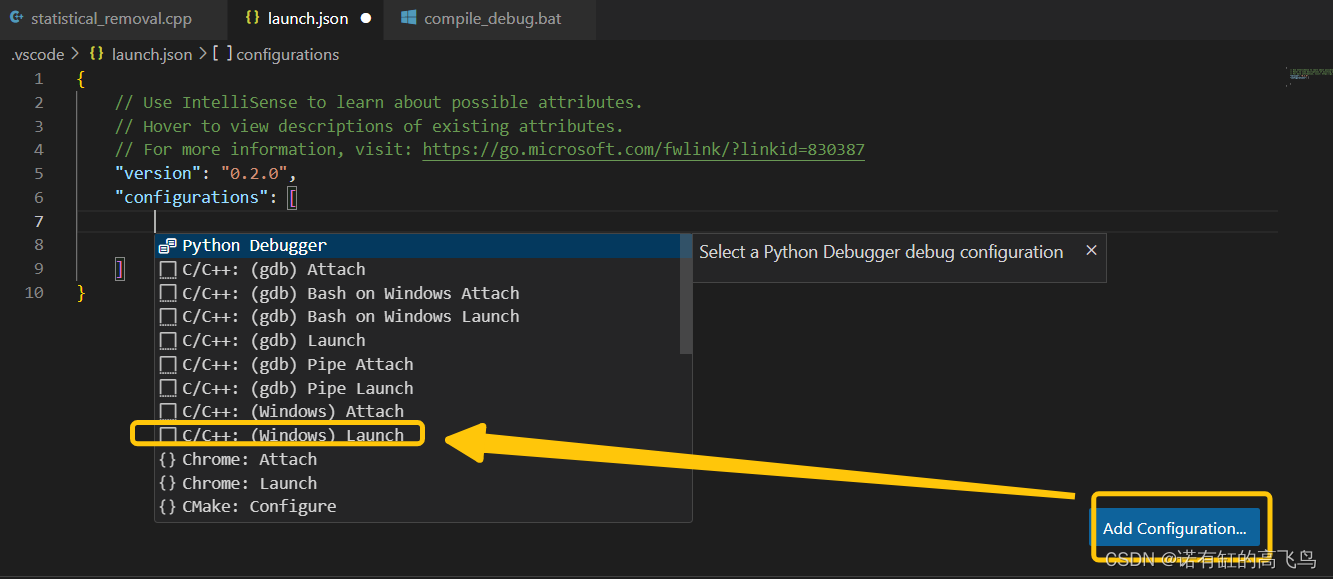
添加配置
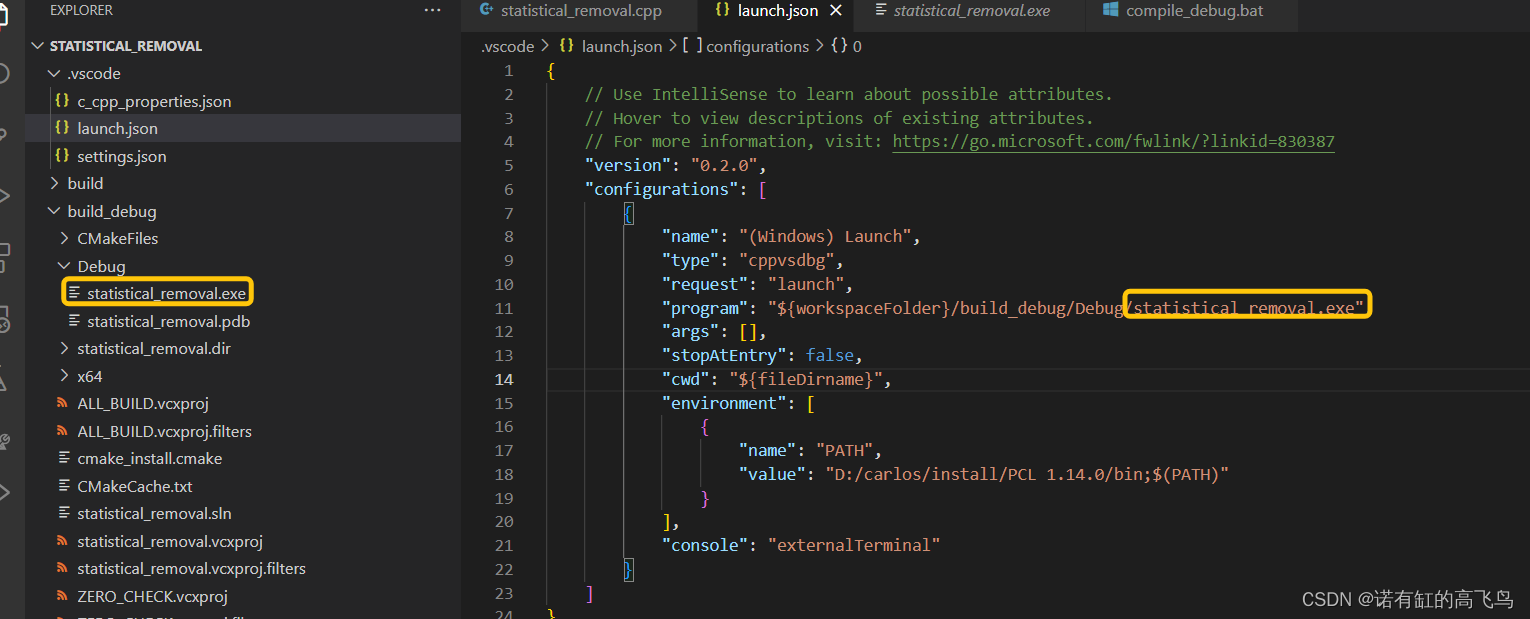
修改配置
"program"就是我们debug的程序对象,"environment"就是为当前程序添加PCL的环境变量,让其能找到PCL、VTK、FLANN等的动态库(.dll)
示例:
{// Use IntelliSense to learn about possible attributes.// Hover to view descriptions of existing attributes.// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387"version": "0.2.0","configurations": [{"name": "(Windows) Launch","type": "cppvsdbg","request": "launch","program": "${workspaceFolder}/build_debug/Debug/statistical_removal.exe","args": [],"stopAtEntry": false,"cwd": "${fileDirname}","environment": [{"name": "PATH","value": "D:/carlos/install/PCL 1.14.0/bin;D:/carlos/install/PCL 1.14.0/3rdParty/FLANN/bin;D:/carlos/install/PCL 1.14.0/3rdParty/VTK/bin;D:/carlos/install/PCL 1.14.0/3rdParty/Qhull/bin;D:/carlos/install/PCL 1.14.0/3rdParty/OpenNI2/Tools;$(PATH)"}],"console": "externalTerminal"}]
}
在statistical_removal.cpp中随便加一个断点,然后使用F5或者右上角的Debug C/C++ File, 开始debug
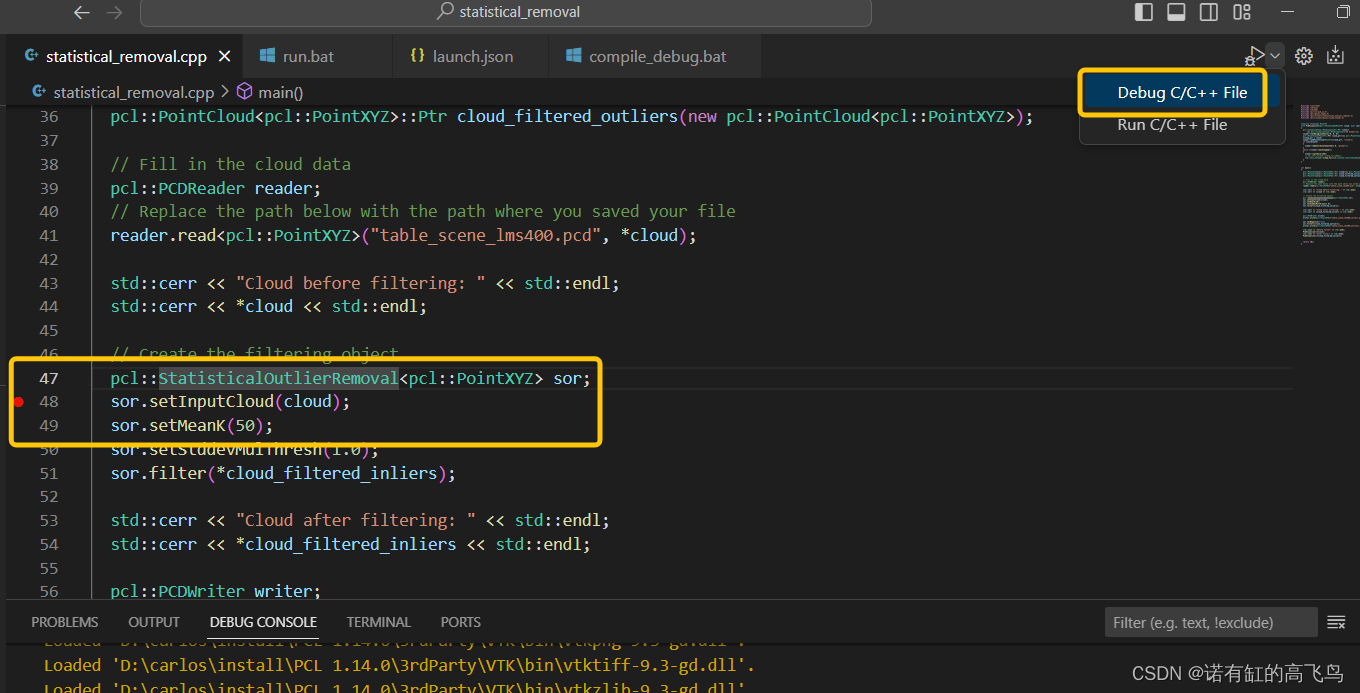
然后就可以看到程序运行到了断点处,左侧有变量状态,自己添加监控,线程的显示
Visual Studio
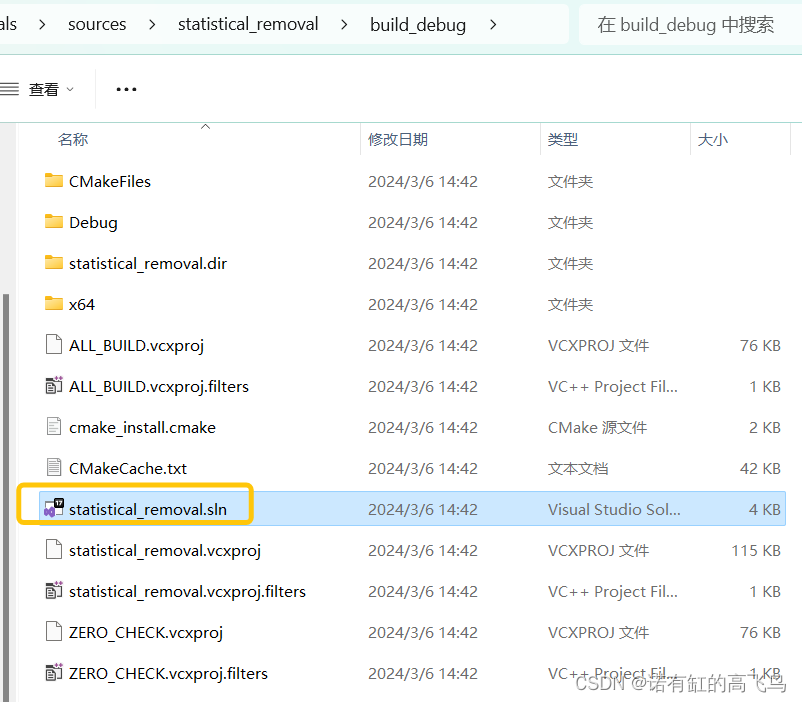
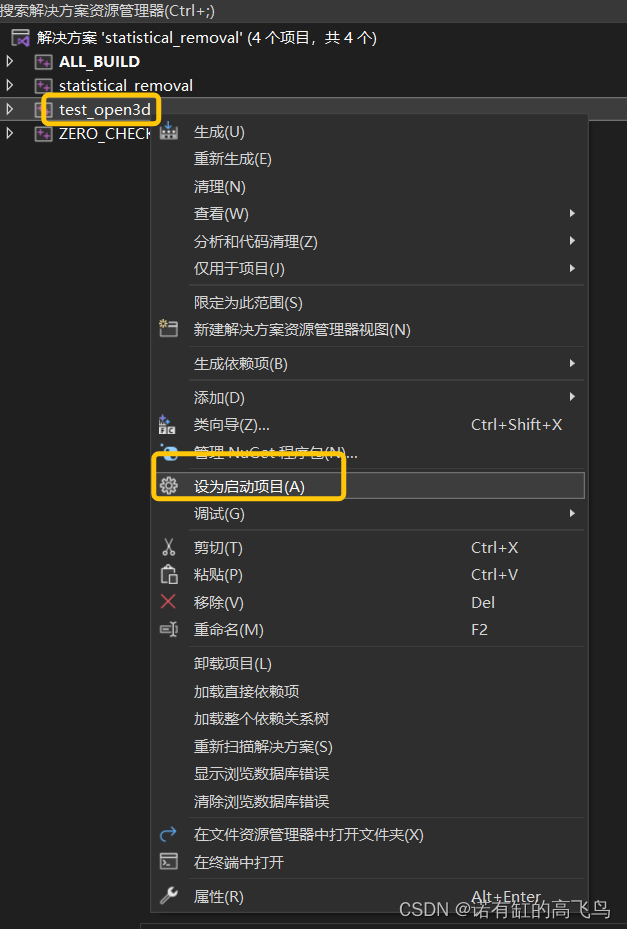
打开文件夹,找到.sln文件双击打开
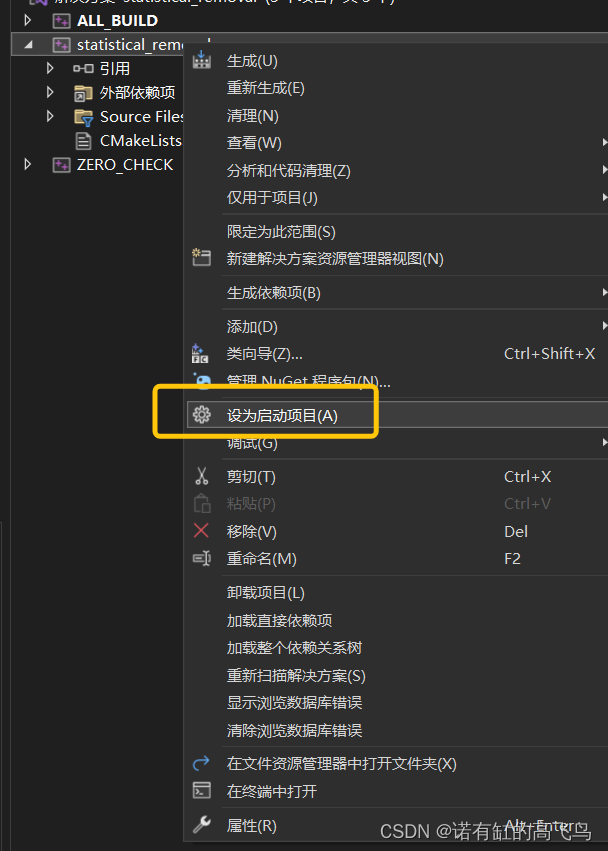
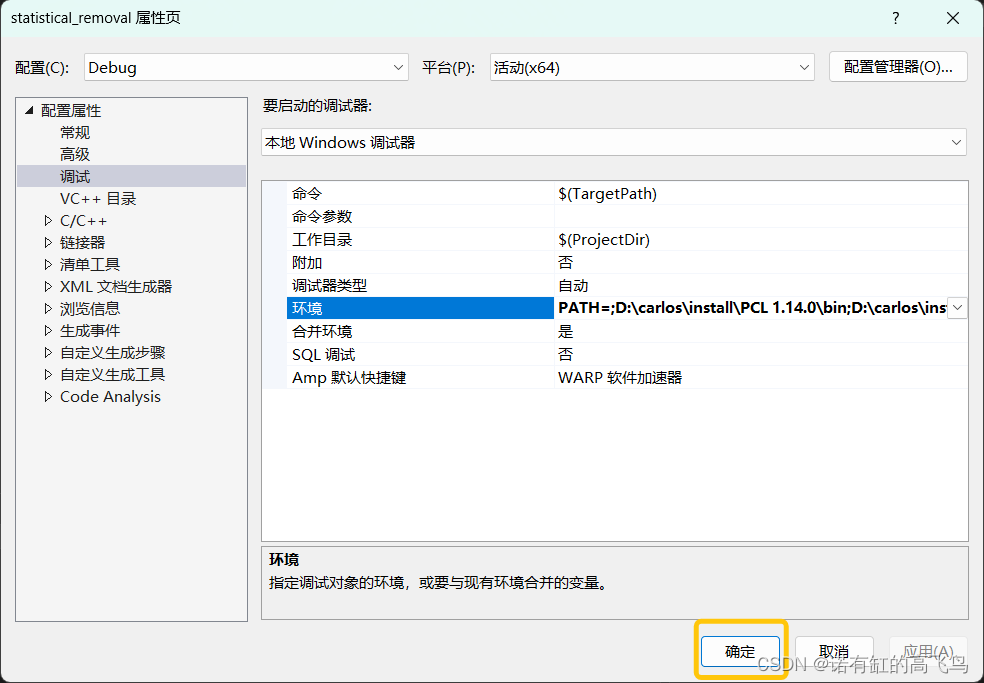
鼠标右键,将statistical_removal设置为启动项目
再点开最下面的属性,Debug–调试–环境–编辑,输入
PATH=;D:\carlos\install\PCL 1.14.0\bin;
D:\carlos\install\PCL 1.14.0\3rdParty\FLANN\bin;
D:\carlos\install\PCL 1.14.0\3rdParty\VTK\bin;
D:\carlos\install\PCL 1.14.0\3rdParty\Qhull\bin;
D:\carlos\install\PCL 1.14.0\3rdParty\OpenNI2\Tools;
$(PATH)
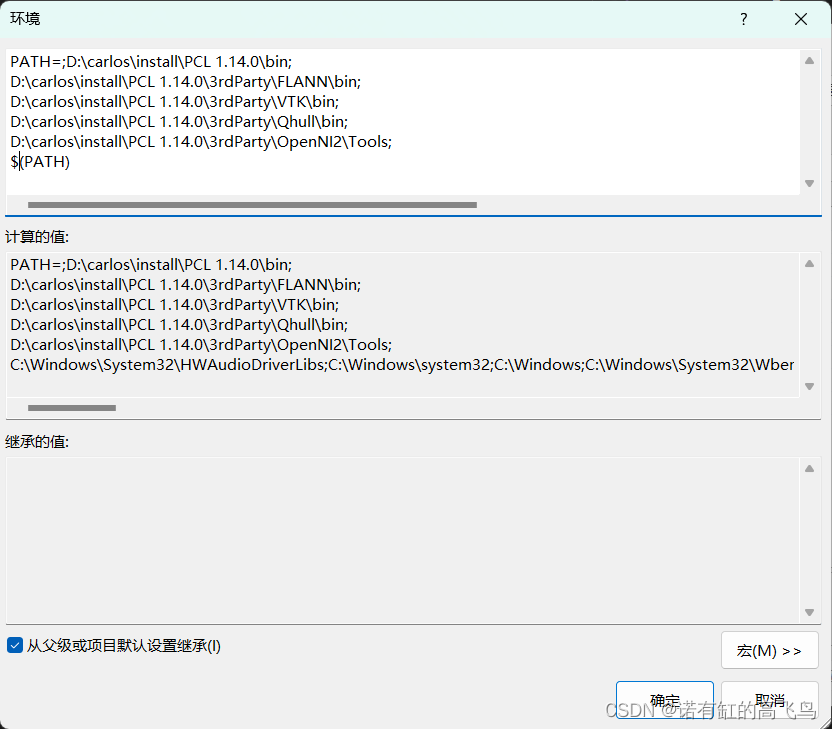
确定
Open3D
准备
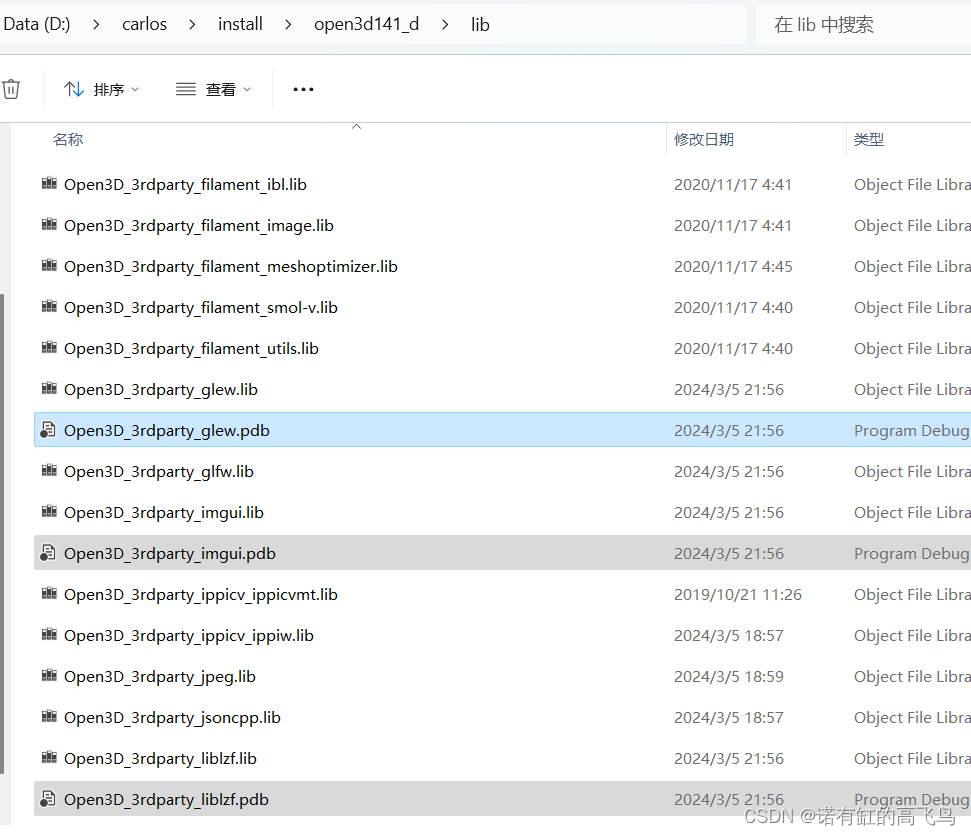
Open3D没有像PCL提供Debug版的lib和对应的pdb文件,需要自己编译,在Open3D0.14.1编译、安装、demo使用教程中我们已经编译好了debug版本,现在需要去build_debug/lib/Debug中找到pdb文件
然后将pdb文件复制到install的目录中
添加open3d测试
在上面PCL示例project中,我们添加一个open3d的测试,在编译脚本中添加open3d的debug版的路径
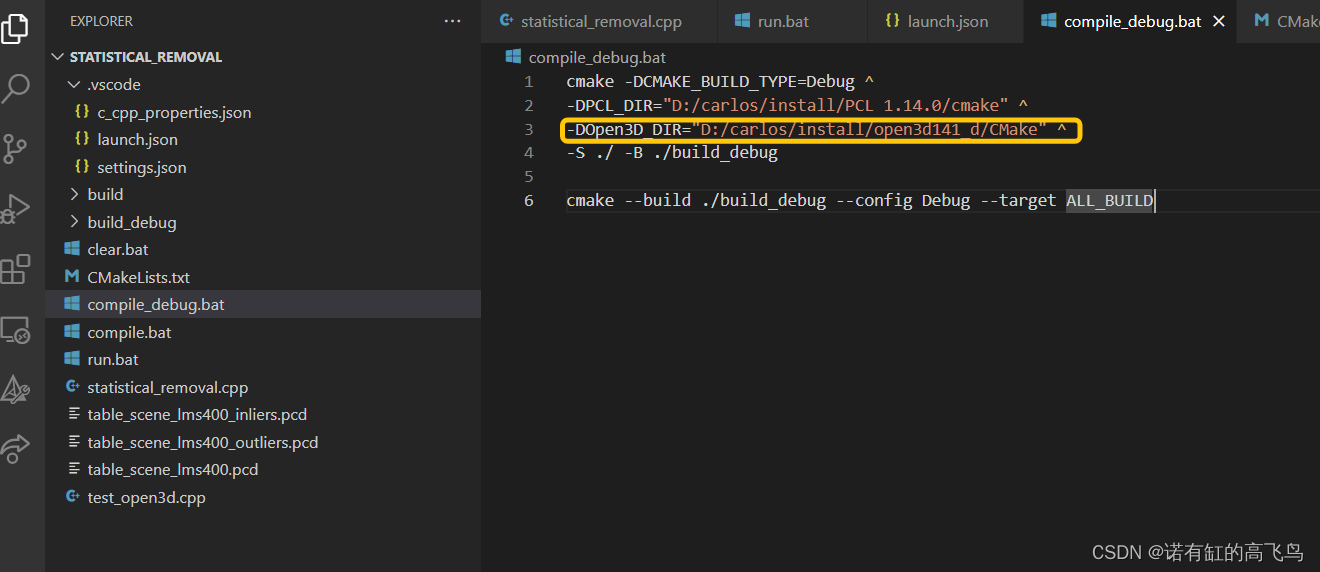
compile_debug.bat:
cmake -DCMAKE_BUILD_TYPE=Debug ^
-DPCL_DIR="D:/carlos/install/PCL 1.14.0/cmake" ^
-DOpen3D_DIR="D:/carlos/install/open3d141_d/CMake" ^
-S ./ -B ./build_debugcmake --build ./build_debug --config Debug --target ALL_BUILD
添加一个测试代码test_open3d.cpp,该代码作用是平面拟合,并把拟合出的平面与剩下点云用不同颜色显示
#include <open3d/Open3D.h>int main()
{std::shared_ptr<open3d::geometry::PointCloud> pcd(new open3d::geometry::PointCloud);open3d::io::ReadPointCloud("./table_scene_lms400.pcd", *pcd);pcd->SegmentPlane();pcd->PaintUniformColor({1, 0, 0});open3d::visualization::DrawGeometries({pcd});return 0;
}
修改CMakeLists.txt
cmake_minimum_required(VERSION 3.18)project(statistical_removal)# PCL
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
# PCL test
add_executable(statistical_removal statistical_removal.cpp)
target_link_libraries(statistical_removal ${PCL_LIBRARIES})# Open3D
option(STATIC_WINDOWS_RUNTIME "Use static (MT/MTd) Windows runtime" ON)
if(STATIC_WINDOWS_RUNTIME)set(CMAKE_MSVC_RUNTIME_LIBRARY "MultiThreaded$<$<CONFIG:Debug>:Debug>")
else()set(CMAKE_MSVC_RUNTIME_LIBRARY "MultiThreaded$<$<CONFIG:Debug>:Debug>DLL")
endif()
find_package(Open3D REQUIRED)
include_directories(${Open3D_INCLUDE_DIRS})# Open3D test
add_executable(test_open3d test_open3d.cpp)
target_link_libraries(test_open3d ${Open3D_LIBRARIES})
然后使用compile_debug.bat进行编译
调试
修改launch.json
{// Use IntelliSense to learn about possible attributes.// Hover to view descriptions of existing attributes.// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387"version": "0.2.0","configurations": [{"name": "(Windows) Launch","type": "cppvsdbg","request": "launch",// "program": "${workspaceFolder}/build_debug/Debug/statistical_removal.exe","program": "${workspaceFolder}/build_debug/Debug/test_open3d.exe","args": [],"stopAtEntry": false,"cwd": "${fileDirname}","environment": [{"name": "PATH","value": "D:/carlos/install/PCL 1.14.0/bin;D:/carlos/install/PCL 1.14.0/3rdParty/FLANN/bin;D:/carlos/install/PCL 1.14.0/3rdParty/VTK/bin;D:/carlos/install/PCL 1.14.0/3rdParty/Qhull/bin;D:/carlos/install/PCL 1.14.0/3rdParty/OpenNI2/Tools;$(PATH)"}],"console": "externalTerminal"}]
}
在源码添加断点,开始调试
平面分割结果可视化
用Visual Studio debug参照上面PCL示例,打开.sln,设置启动项
但是Open3D是静态库,所以不用设置环境变量就可以了,另外用Visual Studio调试前把代码中点云读取路径改成绝对路径再重新编译一下,不然会找不到点云
参考
https://code.visualstudio.com/docs/cpp/launch-json-reference
其余文中已列出
完
主要做激光/影像三维重建,配准、分割等常用点云算法,熟悉open3d、pcl等开源点云库,技术交流、咨询可私信
相关文章:
如何学习、上手点云算法(三):用VsCode、Visual Studio来debug基于PCL、Open3D的代码
写在前面 本文内容 以PCL 1.14.0,Open3D0.14.1为例,对基于PCL、Open3D开发的代码进行源码debug; 如何学习、上手点云算法系列: 如何学习、上手点云算法(一):点云基础 如何学习、上手点云算法(二):点云处理相…...

【干货】alzet渗透泵操作说明
alzet渗透泵是一款小型、可植入式的胶囊渗透泵产品,此产品由于其独特的渗透原理,深受广大科研人员的喜爱。该泵可适用于小鼠、大鼠及其他实验动物的研究,并且alzet渗透泵可减轻科研人员夜间及周末给药的困扰。alzet渗透泵无需外部连接或频繁处…...
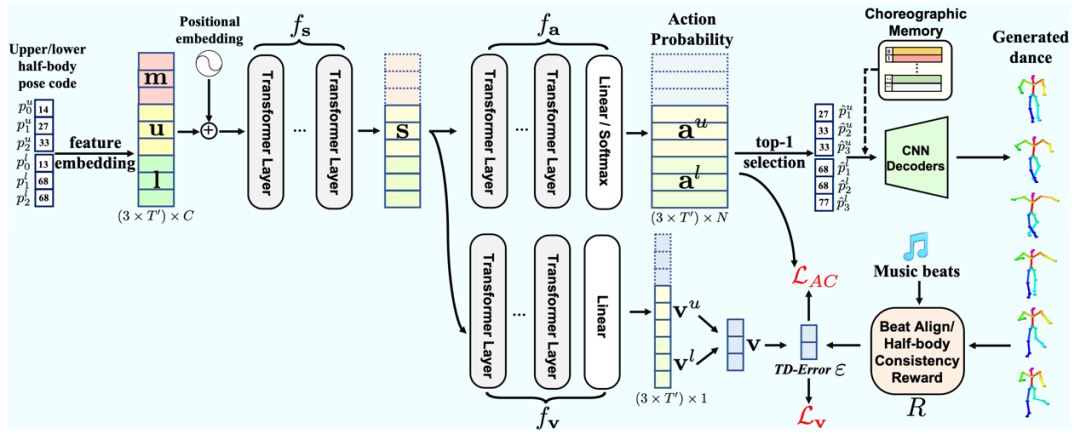
CVPR 2022 Oral | Bailando: 基于编舞记忆和Actor-Critic GPT的3D舞蹈生成
目录 测试结果: 02 提出的方法 测试结果: 预测有3个步骤,速度比较慢 02 提出的方法 1. 针对舞蹈序列的VQ-VAE和编舞记忆 与之前的方法不同,我们不学习从音频特征到 3D 关键点序列的连续域的直接映射。相反,我们先让…...

解读电影级视频生成模型 MovieFactory
Diffusion Models视频生成-博客汇总 前言:MovieFactory是第一个全自动电影生成模型,可以根据用户输入的文本信息自动扩写剧本,并生成电影级视频。其中针对预训练的图像生成模型与视频模型之间的gap提出了微调方法非常值得借鉴。这篇博客详细解读一下这篇论文《MovieFactory:…...
【Python从入门到进阶】50、当当网Scrapy项目实战(三)
接上篇《49、当当网Scrapy项目实战(二)》 上一篇我们讲解了的Spider与item之间的关系,以及如何使用item,以及使用pipelines管道进行数据下载的操作,本篇我们来讲解Scrapy的多页面下载如何实现。 一、多页面下载原理分…...

【调试记录】vscode远程连接问题汇总
1. kex_exchange_identification kex_exchange_identification: read: Connection reset by xxx.xx.xx.x 一直连不上实验室的服务器,用PUTTY和Mobaxterm也不行(报错:Remote side unexpectedly closed network connection)。已知…...
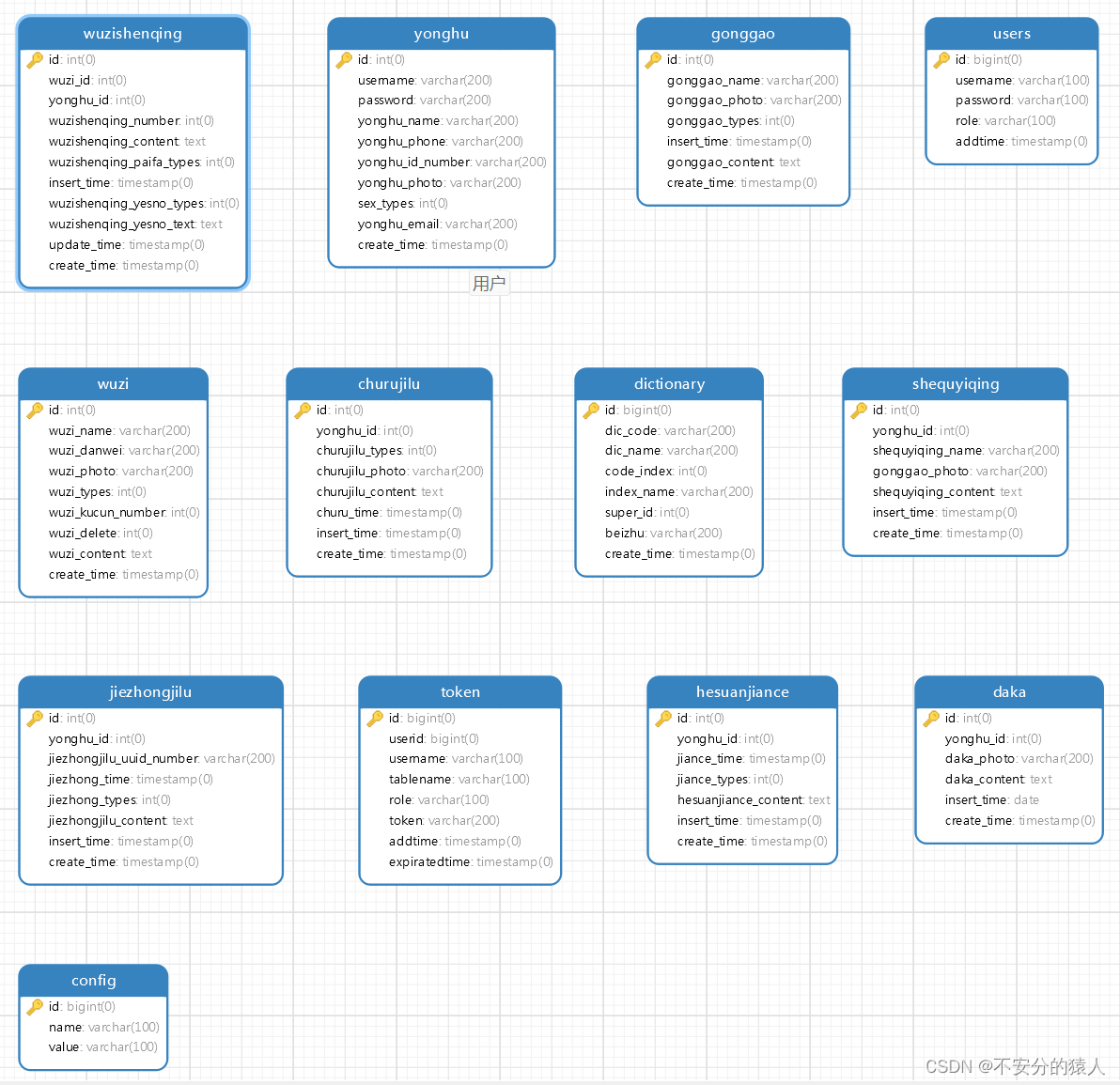
基于springboot的疾病防控综合系统
采用技术 基于springboot的疾病防控综合系统的设计与实现~ 开发语言:Java 数据库:MySQL 技术:SpringBootMyBatis 工具:IDEA/Ecilpse、Navicat、Maven 系统效果展示 用户功能效果 打卡管理 接种记录查看 公告信息查看 社区…...

js实现文本内容过长中间显示...两端正常展示
实现效果 实现思路 获取标题盒子的真实宽度, 我这里用的是clientWidth;获取文本内容所占的实际宽度;根据文字的大小计算出每个文字所占的宽度;判断文本内容的实际宽度是否超出了标题盒子的宽度;通过文字所占的宽度累加之和与标题…...

Buran勒索病毒通过Microsoft Excel Web查询文件进行传播
Buran勒索病毒首次出现在2019年5月,是一款新型的基于RaaS模式进行传播的新型勒索病毒,在一个著名的俄罗斯论坛中进行销售,与其他基于RaaS勒索病毒(如GandCrab)获得30%-40%的收入不同,Buran勒索病毒的作者仅占感染产生的25%的收入,…...
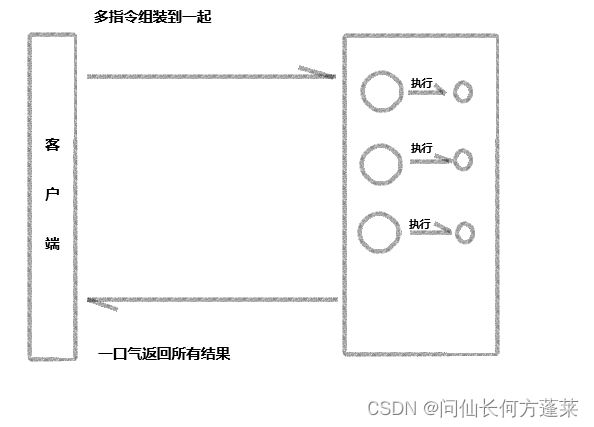
中间件 | Redis - [基本信息]
INDEX 1 常规用法2 QPS3 pipeline 1 常规用法 分布式锁 最常见用法,需要注意分布式锁的redis需要单点 分布式事务 分布式事务中,核心的技术难点其实是分布式事务这个事本身作为数据的持久化 2PC,比如 seata 的 AT 模式下,将 un…...

【Docker】Neo4j 容器化部署
Neo4j环境标准软件基于Bitnami neo4j 构建。当前版本为5.17.0 你可以通过轻云UC部署工具直接安装部署,也可以手动按如下文档操作,该项目已经全面开源,可以从如下环境获取 配置文件地址: https://gitee.com/qingplus/qingcloud-platform Qin…...

Visual studio编译器报1个无法解析的外部命令
解决思路:(以下思路需对照代码进行逐点分析) ①:代码里函数有声明,但是没有定义 (初学者错这个比较多) ②:类中有静态变量成员,没有对它进行初始化(是变量&…...

微信小程序(五十三)修改用户头像与昵称
注释很详细,直接上代码 上一篇 新增内容: 1.外界面个人资料基本模块 2.资料修改界面同步问题实现(细节挺多,考虑了后期转服务器端的方便之处) 源码: app.json {"window": {},"usingCompone…...
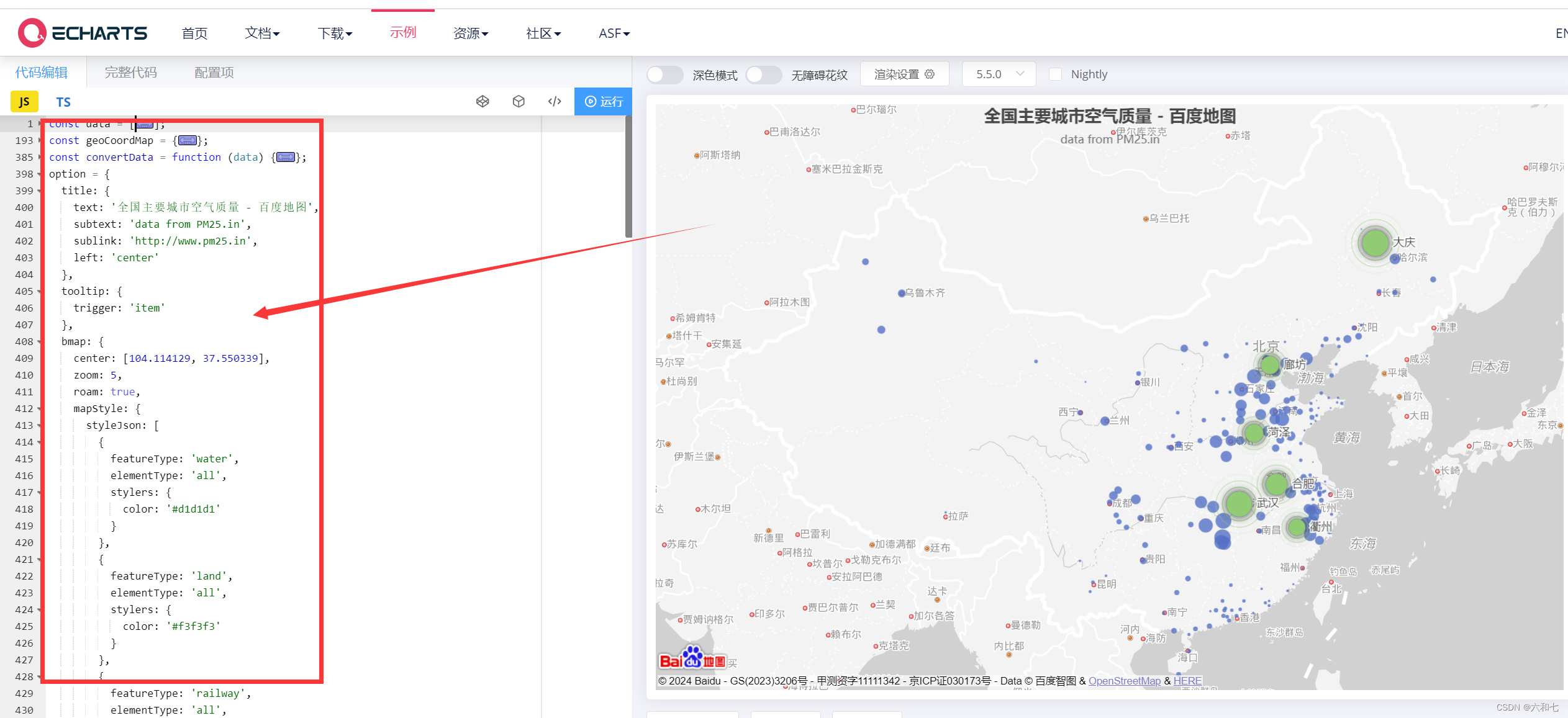
VUE3 显示Echarts百度地图
本次实现最终效果 技术基础以及环境要求 vue3 echarts 百度地图API 要求1: VUE3 环境搭建:https://blog.csdn.net/LQ_001/article/details/136293795 要求2: VUE3 echatrs 环境搭建:https://blog.csdn.net/LQ_001/article/details/1363…...

FFmpeg将视频包AVPacket通过视频流方式写入本地文件
1.写视频头 void writeVideoHeader(const char* videoFileName){int r avformat_alloc_output_context2(&pFormatCtx, nullptr, nullptr,videoFileName);if(r < 0){qDebug()<<"Error: avformat_alloc_output_context2: "<<av_err2str(r);return;…...

C语言连接【MySQL】
稍等更新图片。。。。 文章目录 安装 MySQL 库连接 MySQLMYSQL 类创建 MySQL 对象连接数据库关闭数据库连接示例 发送命令设置编码格式插入、删除或修改记录查询记录示例 参考资料 安装 MySQL 库 在 CentOS7 下,使用命令安装 MySQL: yum install mysq…...

_note_09
1.说一说类加载的过程 加载(Loading) -> 验证(Verification) -> 准备(Preparation) -> 解析(Resolution) -> 初始化(Initialization)类的加载是…...

是否可以在HTTP中缓存POST方法
如果您想知道是否可以缓存post请求,并尝试研究该问题的答案,那么您很可能不会成功。当搜索“缓存post请求”时,第一个结果是这个StackOverflow问题。 答案是令人困惑的,包括缓存应该如何工作,缓存如何根据RFC工作&…...

Xilinx 7系列FPGA配置(ug470)
Xilinx 7系列FPGA配置(ug470) 配置模式串行配置模式接口从-连接方式主-连接方式串行菊花链(非同时配置)串行配置(同时配置)时序 主SPI配置模式SPIx1/x2 连接图SPIx1模式时序SPIx4 连接图SPI操作指令操作fla…...

3分钟开通GPT-4
AI从前年12月份到现在已经伴随我们一年多了,还有很多小伙伴不会开通,其实开通很简单,环境需要自己搞定,升级的话就需要一张visa卡,办理visa卡就可以直接升级chatgptPLSU 一、虚拟卡支付 这种方式的优点是操作简单&…...

前端性能监控指标体系
前端性能监控指标体系:构建高效用户体验的关键 在当今快节奏的互联网时代,用户体验已成为决定产品成败的关键因素之一。前端性能直接影响用户留存率、转化率以及品牌形象,因此建立一套科学的前端性能监控指标体系至关重要。通过实时监控和分…...

Qwen2.5-7B-Instruct网络安全应用:智能威胁检测与分析
Qwen2.5-7B-Instruct网络安全应用:智能威胁检测与分析 1. 引言 网络安全运维团队每天都要面对海量的日志数据,传统的分析方法往往力不从心。安全工程师需要花费大量时间手动筛选日志、分析异常模式、编写威胁报告,这种重复性工作不仅效率低…...

BilibiliDown:打造你的个人B站视频库,高效管理离线内容
BilibiliDown:打造你的个人B站视频库,高效管理离线内容 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/…...

STM32 HardFault_Handler:从寄存器解码到源码定位的实战指南
1. 初识HardFault:当你的STM32突然"罢工" 第一次遇到STM32程序跑飞进入HardFault_Handler时,那种感觉就像开车时突然抛锚——仪表盘亮起故障灯,但你完全不知道引擎舱里发生了什么。作为嵌入式开发者,HardFault是我们最常…...

008、OpenClaw TTS 声学模型实战:训练数据准备与配置解析
上周调一个长句合成,输出音频在中段突然出现音调断裂,像是两个不同人在交替发音。频谱图上一看,隐状态在某个音素边界处发生了跳变。问题最终追溯到训练数据里同一说话人的音频存在采样率混用——部分文件是16kHz,另一些却是22.05kHz。预处理脚本没做统一重采样,导致模型在…...

Stripe 支付集成实战:Java后端核心API详解与避坑指南
1. 为什么选择Stripe支付集成? Stripe作为全球领先的在线支付解决方案,特别适合需要处理国际支付的电商或SaaS平台。我在多个跨境项目中采用Stripe后发现,其API设计非常开发者友好,尤其是对Java后端技术栈的支持相当完善。与国内支…...

WiflyInterface嵌入式Wi-Fi驱动开发与工程实践指南
1. WiflyInterface 库深度解析:面向嵌入式硬件工程师的 WiFly 模块驱动开发指南WiflyInterface 是一个专为嵌入式平台设计的 WiFly(Roving Networks RN-131/RN-171 系列)Wi-Fi 模块通信接口库。该库最初由 ARM mbed 官方团队开发,…...

揭秘OBS-VST:如何让专业音频插件在直播中“活“起来
揭秘OBS-VST:如何让专业音频插件在直播中"活"起来 【免费下载链接】obs-vst Use VST plugins in OBS 项目地址: https://gitcode.com/gh_mirrors/ob/obs-vst 当我们谈论直播音频质量时,常常陷入一个技术困境:要么使用OBS St…...

3大核心功能深度解析:完全掌握MTKClient联发科设备调试终极指南
3大核心功能深度解析:完全掌握MTKClient联发科设备调试终极指南 【免费下载链接】mtkclient MTK reverse engineering and flash tool 项目地址: https://gitcode.com/gh_mirrors/mt/mtkclient MTKClient作为一款专业的联发科设备逆向工程和刷机工具…...

如何快速掌握FanControl:Windows风扇智能控制的终极免费方案
如何快速掌握FanControl:Windows风扇智能控制的终极免费方案 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trend…...