OpenCV开发笔记(七十七):相机标定(二):通过棋盘标定计算相机内参矩阵矫正畸变摄像头图像
若该文为原创文章,转载请注明原文出处
本文章博客地址:https://hpzwl.blog.csdn.net/article/details/136616551
各位读者,知识无穷而人力有穷,要么改需求,要么找专业人士,要么自己研究
红胖子(红模仿)的博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结合等等)持续更新中…(点击传送门)
OpenCV开发专栏(点击传送门)
上一篇:《OpenCV开发笔记(七十六):相机标定(一):识别棋盘并绘制角点》
下一篇:持续补充中…
前言
通过相机图片可以识别出棋盘角点了,这时候我们需要通过角点去计算相机内参矩阵,通过上篇得知畸变的原理,所以我们尽可能要全方位都能获取标定图片,全方位意思是提供的多张图综合起来基本覆盖了相机所有的像素,同时还要注意远近和斜着
本篇通过一张图片来识别计算得到相机内参矩阵,并矫正相机畸形。
补充
做项目一定要多张且基本覆盖相机所有区域,要保证每一张截取的图片也要被识别,可以做成个软件,识别出棋盘都在一个预先指定的区域内则截图,然后下一个区域,实现半自动半人工化标定。
Demo

这里只用了一张图校准,所以可能内参矩阵经度不那么高:
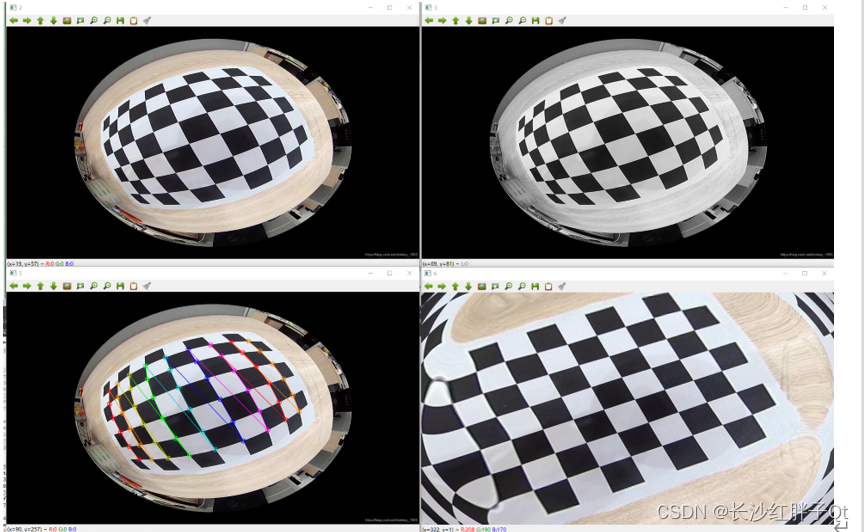
一张图校准的实例
注意:这里demo只使用了可识别的一张图作为计算,可能没覆盖的区域则出现不可预期的图像问题。
步骤一:世界坐标系初始化
这里是直接填充行列的坐标,第三个是z坐标直接设置为0,为视口处:
// 步骤八:角点对应的三维坐标(一张图一组)
std::vector<std::vector<cv::Point3f>> vectorObjectPoint;
std::vector<cv::Point3f> objectPoints; // 三维世界坐标系
for(int i = 0; i < chessboardRowCornerCount; i++)
{for(int j = 0; j < chessboardColCornerCount; j++){objectPoints.push_back(cv::Point3f(j, i, 0));}
}
vectorObjectPoint.push_back(objectPoints);
步骤二:识别的角点放入列表
多张图放入多次,这里只有一张图:
// 步骤九:图像识别出来的角点(一张图一组)
std::vector<std::vector<cv::Point2f>> vectorImagePoint;
vectorImagePoint.push_back(vectorPoint2fCorners);
步骤三:计算内参和畸变系数
输出的参数有点多,输入的参数却不多:
// 步骤十:计算内参和畸变系数
cv::Mat cameraMatrix; // 相机矩阵(接收输出)
cv::Mat distCoeffs; // 畸变系数(接收输出)
cv::Mat Rotate; // 旋转量(接收输出)
cv::Mat Translate; // 偏移量(接收输出)
cv::calibrateCamera(vectorObjectPoint,vectorImagePoint,grayMat.size(),cameraMatrix,distCoeffs,Rotate,Translate);
std::cout << "cameraMatrix:" << std::endl;
std::cout << cameraMatrix << std::endl;std::cout << "distCoeffs:" << std::endl;
std::cout << distCoeffs << std::endl;std::cout << "Rotate:" << std::endl;
std::cout << Rotate << std::endl;std::cout << "Translate:" << std::endl;
std::cout << Translate << std::endl;
步骤四:畸变函数校准
这里校准相对容易,所以难点在于标定校准,做项目肯定要自己写一个标定软件了,每次这么手动查看校准肯定不行的。
// 步骤十一:畸变图像校准
cv::Mat dstMat;
cv::undistort(srcMat, dstMat, cameraMatrix, distCoeffs);
cv::imshow("6", dstMat);
函数原型
calibrateCamera:相机标定求解函数
OpenCV中的一个函数,用于相机标定。相机标定是估计相机内参(如焦距、主点坐标等)和畸变系数的过程,这些参数对于后续的图像处理任务(如三维重建、目标跟踪等)至关重要。
double calibrateCamera(InputArrayOfArrays objectPoints, InputArrayOfArrays imagePoints, Size imageSize, OutputArray cameraMatrix, OutputArray distCoeffs, OutputArray rvecs, OutputArray tvecs, int flags=0, TermCriteria criteria=TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, 1e-6));
参数说明:
- objectPoints:世界坐标系中的三维点。通常,这些点是通过在标定板上定义的一系列点来获取的,这些点的坐标是已知的。对于每个图像,它应该是一个 Nx3 的数组(或数组列表),其中 N 是点的数量,而 3 表示每个点的 (X, Y, Z) 坐标。
- imagePoints:图像坐标系中的二维点,即对应于 objectPoints 中的三维点在图像中的投影。对于每个图像,它应该是一个 Nx2 的数组(或数组列表),其中 N 是点的数量,而 2 表示每个点的 (x, y) 坐标。
- imageSize:图像的大小,表示为 Size 类型的对象,包含图像的宽度和高度。
- cameraMatrix:输出参数,存储 3x3 的相机内参矩阵。
- distCoeffs:输出参数,存储畸变系数。通常有 5 个系数(k1, k2, p1, p2, k3)对于径向和切向畸变,或 8 个系数(k1, k2, k3, k4, k5, k6, p1, p2)对于鱼眼相机模型。
- rvecs:输出参数,对于每个图像,存储旋转向量的数组。
- tvecs:输出参数,对于每个图像,存储平移向量的数组。
- flags:不同标志的组合,用于指定标定过程中使用的算法。
CV_CALIB_USE_INTRINSIC_GUESS:使用该参数时,将包含有效的fx,fy,cx,cy的估计值的内参矩阵cameraMatrix,作为初始值输入,然后函数对其做进一步优化。如果不使用这个参数,用图像的中心点初始化光轴点坐标(cx, cy),使用最小二乘估算出fx,fy(这种求法好像和张正友的论文不一样,不知道为何要这样处理)。注意,如果已知内部参数(内参矩阵和畸变系数),就不需要使用这个函数来估计外参,可以使用solvepnp()函数计算外参数矩阵。
CV_CALIB_FIX_PRINCIPAL_POINT:在进行优化时会固定光轴点,光轴点将保持为图像的中心点。当CV_CALIB_USE_INTRINSIC_GUESS参数被设置,保持为输入的值。
CV_CALIB_FIX_ASPECT_RATIO:固定fx/fy的比值,只将fy作为可变量,进行优化计算。当 CV_CALIB_USE_INTRINSIC_GUESS没有被设置,fx和fy的实际输入值将会被忽略,只有fx/fy的比值被计算和使用。
CV_CALIB_ZERO_TANGENT_DIST:切向畸变系数(P1,P2)被设置为零并保持为零。
CV_CALIB_FIX_K1,…,CV_CALIB_FIX_K6:对应的径向畸变系数在优化中保持不变。如果设置了CV_CALIB_USE_INTRINSIC_GUESS参数,就从提供的畸变系数矩阵中得到。否则,设置为0。
CV_CALIB_RATIONAL_MODEL(理想模型):启用畸变k4,k5,k6三个畸变参数。使标定函数使用有理模型,返回8个系数。如果没有设置,则只计算其它5个畸变参数。
CALIB_THIN_PRISM_MODEL (薄棱镜畸变模型):启用畸变系数S1、S2、S3和S4。使标定函数使用薄棱柱模型并返回12个系数。如果不设置标志,则函数计算并返回只有5个失真系数。
CALIB_FIX_S1_S2_S3_S4 :优化过程中不改变薄棱镜畸变系数S1、S2、S3、S4。如果cv_calib_use_intrinsic_guess设置,使用提供的畸变系数矩阵中的值。否则,设置为0。
CALIB_TILTED_MODEL (倾斜模型):启用畸变系数tauX and tauY。标定函数使用倾斜传感器模型并返回14个系数。如果不设置标志,则函数计算并返回只有5个失真系数。
CALIB_FIX_TAUX_TAUY :在优化过程中,倾斜传感器模型的系数不被改变。如果cv_calib_use_intrinsic_guess设置,从提供的畸变系数矩阵中得到。否则,设置为0。 - criteria:迭代优化的终止条件。通常包含最大迭代次数和收敛的精度。
这个函数返回一个双精度浮点数,表示重投影误差的估计值,即实际图像点与通过相机参数和畸变系数计算出的图像点之间的平均误差。
为了获得准确的相机标定结果,通常需要多个视图(即多张不同角度和姿态拍摄的标定板图像),**并确保标定板在不同图像中占据足够的视场。**此外,图像应该清晰,且标定板上的特征点(如棋盘格的角点)应准确检测。
initUndistortRectifyMap:计算畸变参数
OpenCV中用于初始化用于图像去畸变和校正的映射表的函数。这个函数的目的是生成两个映射,一个用于x坐标,另一个用于y坐标,它们可以被用于 remap函数来校正图像的畸变。
void initUndistortRectifyMap(InputArray cameraMatrix, InputArray distCoeffs, InputArray R, InputArray newCameraMatrix, Size size, int m1type, OutputArray map1, OutputArray map2)
参数说明
- cameraMatrix:相机的内参矩阵,一个3x3的浮点数矩阵。
- distCoeffs:畸变系数,一个1x5或1x8的向量,包含径向和切向畸变系数。
- R:可选的旋转矩阵,一个3x3的浮点数矩阵,表示从原相机坐标系到新的相机坐标系的旋转。如果这个参数是空的,那么newCameraMatrix必须是cameraMatrix。
- newCameraMatrix:新的相机内参矩阵,一个3x3的浮点数矩阵。这个矩阵可以是原始相机矩阵,或者经过getOptimalNewCameraMatrix调整后的矩阵,以考虑图像的有效视场。
- size:输出映射的尺寸,表示为Size类型的对象,包含图像的宽度和高度。
- m1type:输出映射的类型,可以是CV_32FC1或CV_16SC2。
- map1:输出的第一个映射,用于x坐标,可以被传递给remap函数。
- map2:输出的第二个映射,用于y坐标,可以被传递给remap函数。
这两个映射map1和map2可以被传递给remap函数,以对图像进行去畸变和校正。
如果有一个畸变的图像distortedImage和想要得到校正后的图像undistortedImage,可以这样使用这两个函数:
Mat map1,map2;
initUndistortRectifyMap(cameraMatrix, distCoeffs, R, newCameraMatrix, size, CV_32FC1, map1, map2);
remap(distortedImage, undistortedImage, map1, map2, INTER_LINEAR);
在这个例子中,INTER_LINEAR是插值方法的类型,用于remap函数。其他的插值方法,如INTER_NEAREST、INTER_CUBIC等也可以被使用,具体取决于应用需求。
Demo源码
void OpenCVManager::testCorrectingChessboard()
{
#define TestCorrectingChessboardUseCamera 0
#if !TestCorrectingChessboardUseCamera// 使用图片
// std::string srcFilePath = "D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/chessboard.png";
// std::string srcFilePath = "D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/24.jpg";
// std::string srcFilePath = "D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/27.png";
// std::string srcFilePath = "D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/28.png";std::string srcFilePath = "D:/qtProject/openCVDemo/openCVDemo/modules/openCVManager/images/28.jpg";cv::Mat srcMat = cv::imread(srcFilePath);
#else// 使用摄像头cv::VideoCapture capture;// 插入USB摄像头默认为0if(!capture.open(0)){qDebug() << __FILE__ << __LINE__ << "Failed to open camera: 0";}else{qDebug() << __FILE__ << __LINE__ << "Succeed to open camera: 0";}while(true){cv::Mat srcMat;capture >> srcMat;
#endifint chessboardColCornerCount = 6;int chessboardRowCornerCount = 9;
// int chessboardColCornerCount = 7;
// int chessboardRowCornerCount = 7;// 步骤一:读取文件
// cv::imshow("1", srcMat);
// cv::waitKey(0);
// 步骤二:缩放,太大了缩放下(可省略)cv::resize(srcMat, srcMat, cv::Size(srcMat.cols / 2, srcMat.rows / 2));cv::Mat srcMat2 = srcMat.clone();cv::Mat srcMat3 = srcMat.clone();cv::imshow("2", srcMat);
// cv::waitKey(0);// 步骤三:灰度化cv::Mat grayMat;cv::cvtColor(srcMat, grayMat, cv::COLOR_BGR2GRAY);cv::imshow("3", grayMat);
// cv::waitKey(0);// 步骤四:检测角点std::vector<cv::Point2f> vectorPoint2fCorners;bool patternWasFound = false;patternWasFound = cv::findChessboardCorners(grayMat,cv::Size(chessboardColCornerCount, chessboardRowCornerCount),vectorPoint2fCorners,cv::CALIB_CB_ADAPTIVE_THRESH | cv::CALIB_CB_FAST_CHECK | cv::CALIB_CB_NORMALIZE_IMAGE);/*enum { CALIB_CB_ADAPTIVE_THRESH = 1, // 使用自适应阈值将图像转化成二值图像CALIB_CB_NORMALIZE_IMAGE = 2, // 归一化图像灰度系数(用直方图均衡化或者自适应阈值)CALIB_CB_FILTER_QUADS = 4, // 在轮廓提取阶段,使用附加条件排除错误的假设CALIB_CB_FAST_CHECK = 8 // 快速检测};*/cvui::printf(srcMat, 0, 0, 1.0, 0xFF0000, "found = %s", patternWasFound ? "true" : "false");cvui::printf(srcMat, 0, 24, 1.0, 0xFF0000, "count = %d", vectorPoint2fCorners.size());qDebug() << __FILE__ << __LINE__ << vectorPoint2fCorners.size();// 步骤五:绘制棋盘点cv::drawChessboardCorners(srcMat2,cv::Size(chessboardColCornerCount, chessboardRowCornerCount),vectorPoint2fCorners,patternWasFound);
#if TestCorrectingChessboardUseCameracv::imshow("0", srcMat);cv::imshow("4", srcMat2);if(!patternWasFound){cv::imshow("5", srcMat3);cv::waitKey(1);continue;}
#endif// 步骤六:进一步提取亚像素角点cv::TermCriteria criteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, // 类型30, // 参数二: 最大次数0.001); // 参数三:迭代终止阈值/*#define CV_TERMCRIT_ITER 1 // 终止条件为: 达到最大迭代次数终止#define CV_TERMCRIT_NUMBER CV_TERMCRIT_ITER //#define CV_TERMCRIT_EPS 2 // 终止条件为: 迭代到阈值终止*/qDebug() << __FILE__ << __LINE__ << vectorPoint2fCorners.size();cv::cornerSubPix(grayMat,vectorPoint2fCorners,cv::Size(5, 5),cv::Size(-1, -1),criteria);// 步骤七:绘制棋盘点cv::drawChessboardCorners(srcMat3,cv::Size(chessboardColCornerCount, chessboardRowCornerCount),vectorPoint2fCorners,patternWasFound);cv::imshow("5", srcMat3);
// cv::waitKey(0);// 步骤八:角点对应的三维坐标(一张图一组)std::vector<std::vector<cv::Point3f>> vectorObjectPoint;std::vector<cv::Point3f> objectPoints; // 三维世界坐标系for(int i = 0; i < chessboardRowCornerCount; i++){for(int j = 0; j < chessboardColCornerCount; j++){objectPoints.push_back(cv::Point3f(j, i, 0));}}vectorObjectPoint.push_back(objectPoints);// 步骤九:图像识别出来的角点(一张图一组)std::vector<std::vector<cv::Point2f>> vectorImagePoint;vectorImagePoint.push_back(vectorPoint2fCorners);// 步骤十:计算内参和畸变系数cv::Mat cameraMatrix; // 相机矩阵(接收输出)cv::Mat distCoeffs; // 畸变系数(接收输出)cv::Mat Rotate; // 旋转量(接收输出)cv::Mat Translate; // 偏移量(接收输出)cv::calibrateCamera(vectorObjectPoint,vectorImagePoint,grayMat.size(),cameraMatrix,distCoeffs,Rotate,Translate);std::cout << "cameraMatrix:" << std::endl;std::cout << cameraMatrix << std::endl;std::cout << "distCoeffs:" << std::endl;std::cout << distCoeffs << std::endl;std::cout << "Rotate:" << std::endl;std::cout << Rotate << std::endl;std::cout << "Translate:" << std::endl;std::cout << Translate << std::endl;// 步骤十一:畸变图像校准cv::Mat dstMat;cv::undistort(srcMat, dstMat, cameraMatrix, distCoeffs);cv::imshow("6", dstMat);#if TestCorrectingChessboardUseCameracv::waitKey(1);}
// cv::imshow(_windowTitle.toStdString(), dstMat);
#elsecv::waitKey(0);
#endif
}
对应工程模板v1.68.0

入坑
入坑一:无法识别图像
问题
无法识别。
原理
要全部棋盘视野内,且可以识别,这个确实识别不了。
解决
换图重新来过(这是笔者随便找的图)。
入坑二:校准之后四角不准
问题
四角明显不对。
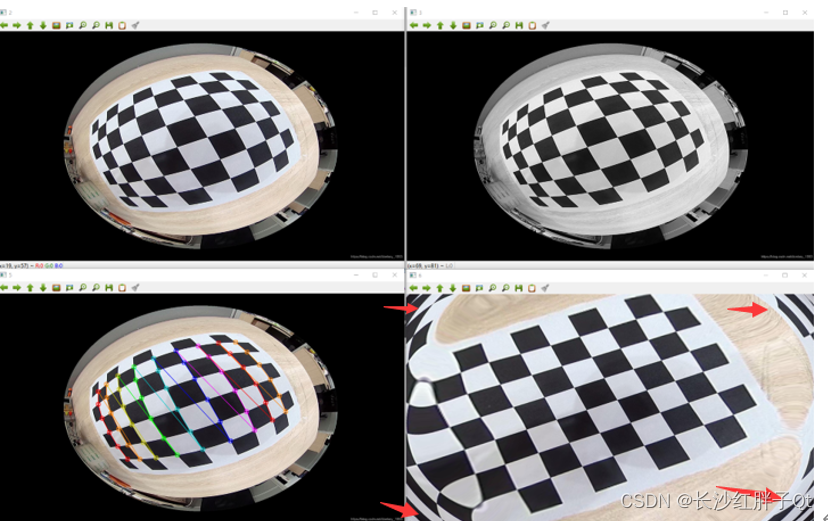
原理
这里需要多张图在能识别的情况下覆盖所有区域。
解决
先这样,下次实际标定的时候再多张图看是否还存在该问题。
上一篇:《OpenCV开发笔记(七十六):相机标定(一):识别棋盘并绘制角点》
下一篇:持续补充中…
若该文为原创文章,转载请注明原文出处
本文章博客地址:https://hpzwl.blog.csdn.net/article/details/136616551
相关文章:
OpenCV开发笔记(七十七):相机标定(二):通过棋盘标定计算相机内参矩阵矫正畸变摄像头图像
若该文为原创文章,转载请注明原文出处 本文章博客地址:https://hpzwl.blog.csdn.net/article/details/136616551 各位读者,知识无穷而人力有穷,要么改需求,要么找专业人士,要么自己研究 红胖子(红模仿)的博…...
2024蓝桥杯每日一题(时间日期)
一、第一题:日期差值 解题思路:模拟 写一个计算时间的板子两者相减 【Python程序代码】 mon [0,31,28,31,30,31,30,31,31,30,31,30,31] def pd(x):if x%4000 or (x%40 and x%100!0):return Truereturn False def get_day(y,m,d):res 0for i …...

js【详解】事件
给 DOM 节点绑定事件 推荐使用 addEventListener 函数 第一个参数:事件名称第二个参数:事件处理函数(第一个参数为 event)第三个参数: true 采用捕获法来处理事件false 【推荐】采用冒泡法来处理事件 let div1 docu…...

webpack5基础--14_优化css
Css 处理 提取 Css 成单独文件 Css 文件目前被打包到 js 文件中,当 js 文件加载时,会创建一个 style 标签来生成样式 这样对于网站来说,会出现闪屏现象,用户体验不好 我们应该是单独的 Css 文件,通过 link 标签加载…...

Skywalking(9.7.0) 告警配置
图片被吞,来这里看吧:https://juejin.cn/post/7344567669893021736 过年前一天发版,大家高高兴兴准备回家过年去了。这时候老板说了一句,记得带上电脑,关注用户反馈。有紧急问题在高速上都得给我找个服务区改好。 但是…...

删除、创建、验证Kafka安装自带的__consumer_offsets topic
删除Kafka自带Topic 一般情况下,你删除Kafka自带的__consumer_offsets topic,会报错提示不能删除。 倔强的你直接找到zookeeper删掉了它,list查看确实没有这个topic了,但是这会导致消费者和偏移量无法记录。 创建Kafka自带的Topi…...

在文件夹下快速创建vue项目搭建vue框架详细步骤
一、首先在你的电脑目录下新建一个文件夹 进入该文件夹并打开控制台(输入cmd指令) 进入控制台后输入 vue create springboot_vue (自己指定名称) 如果出现这类报错如:npm install 的报错npm ERR! network request to http://registry.cnp…...
蓝桥杯倒计时 36天-DFS练习
文章目录 飞机降落仙境诅咒小怂爱水洼串变换 飞机降落 思路:贪心暴搜。 #include<bits/stdc.h>using namespace std; const int N 10; int t,n; //这题 N 比较小,可以用暴力搜搜复杂度是 TN*N! struct plane{int t,d,l; }p[N]; bool vis[N];//用…...
ctfshow web入门 php特性总结
1.web89 intval函数的利用,intval函数获取变量的整数值,失败时返回0,空的数组返回,非空数组返回1 num[]1 intval ( mixed $var [, int $base 10 ] ) : int Note: 如果 base 是 0,通过检测 var 的格式来决定使用的进…...
Media Encoder 2024:未来媒体编码的新纪元 mac/win版
随着科技的飞速发展,媒体内容已成为我们日常生活中不可或缺的一部分。为了满足用户对高质量视频内容不断增长的需求,Media Encoder 2024应运而生,它凭借卓越的技术和创新的特性,重塑了媒体编码的未来。 Media Encoder 2024 mac/w…...

2024年AI辅助研发趋势:数智时代革新新引擎
随着科技的飞速发展,人工智能(AI)已经渗透到我们生活的方方面面,而在软件开发领域,AI辅助研发正成为一股不可忽视的力量。本文将探讨2024年AI辅助研发的趋势,以及它如何成为数智时代革新的新引擎。 AI辅助研…...

2024年家政预约上门服务小程序【用户端+商家端+师傅端】源码
024最新家政预约上门服务小程序源码 主要功能:商家入住,师傅入住,缴纳保正金 支持师傅,抢单派单 支持多城市多门下单,支持预约上门服务到店核销 支持补差价义价,支持区域服务限制 基于thinkphp和原生小程序开发...
数据结构:静态链表(编程技巧)
链表的元素用数组存储, 用数组的下标模拟指针。 一、理解 如果有些程序设计语言没有指针类型,如何实现链表? 在使用指针类型实现链表时,我们很容易就可以直接在内存中新建一块地址用于创建下一个结点,在逻辑上&#x…...

python中的**可以表示什么??
在Python中,** 有两个主要的用途: 作为幂运算符:a ** b 表示a的b次方。例如,2 ** 3 会返回 8,因为2的3次方等于8。 在函数调用或定义时作为关键字参数的解包: 当你有一个字典,并且你想将这个字…...

使用 Git 跟踪项目文件
本章内容为:用Django 写学习笔记程序第三章.2部署程序摘录,详情内容查看请跳转下方链接: 用Django 写学习笔记程序第三章.2部署程序 文章目录 使用 Git 跟踪项目文件虚拟环境中安装 gitgit 是什么git 安装完成后的简单配置创建项目忽略文件初…...
——set,map学习使用)
C++从零开始(day47)——set,map学习使用
这是关于一个普通双非本科大一学生的C的学习记录贴 在此前,我学了一点点C语言还有简单的数据结构,如果有小伙伴想和我一起学习的,可以私信我交流分享学习资料 那么开启正题 今天分享的是关于set和map的知识点 1.关联式容器 在前面&#…...

手机和电脑同步的好用记事本软件有哪些
我常常需要随手记录各种信息,以便随时查阅和使用。比如,在下班路上,我会用手机记录明天要处理的工作事项、购物清单,或是某个突然迸发的创意想法;而在办公室,我则需要在电脑上整理会议纪要、项目计划&#…...
使用CSS制作动态的环形图/饼图
使用纯 CSS Animation conic-gradient 实现一个环形图。 饼图的实现思路和环形图一样,去掉中间的圆形遮盖 after 伪类元素即可。 一、构建基础样式 构建圆形节点和中间的遮盖元素。 <style>body {background-color: rgb(130, 226, 255);}.circle {top: 16…...
掌握React中的useEffect:函数组件中的魔法钩子
🤍 前端开发工程师、技术日更博主、已过CET6 🍨 阿珊和她的猫_CSDN博客专家、23年度博客之星前端领域TOP1 🕠 牛客高级专题作者、打造专栏《前端面试必备》 、《2024面试高频手撕题》 🍚 蓝桥云课签约作者、上架课程《Vue.js 和 E…...
WPF 窗口添加投影效果Effect
BlurRadius:阴影半径 Color:颜色 Direction:投影方向 ShadowDepth:投影的深度 <Window.Effect><DropShadowEffect BlurRadius"10" Color"#FF858484" Direction"300" ShadowDepth&quo…...

glogg终极指南:如何通过智能架构设计实现高性能日志分析
glogg终极指南:如何通过智能架构设计实现高性能日志分析 【免费下载链接】glogg A fast, advanced log explorer. 项目地址: https://gitcode.com/gh_mirrors/gl/glogg glogg是一款专为开发者和系统管理员设计的跨平台日志查看器,它巧妙地将grep的…...

如何彻底解决Cursor AI试用限制:免费解锁Pro功能的完整技术方案
如何彻底解决Cursor AI试用限制:免费解锁Pro功能的完整技术方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached…...

别再手动搬数据了!用n8n把ChatGPT和飞书打通,5分钟搞定日报自动汇总
告别低效日报:用n8nChatGPT打造飞书智能日报系统 每天早上9点,市场部的张经理都要花半小时手动整理团队成员的日报——复制粘贴飞书文档、调整格式、汇总关键数据,最后发到管理层群。这种重复劳动不仅消耗精力,还容易遗漏重要信息…...

Vue3.0 + ElementPlus 后台管理系统模板:从零搭建到实战部署
1. 为什么选择Vue3.0ElementPlus开发后台系统 最近两年接手过不少后台管理系统的项目,从最初的Vue2到现在的Vue3,我深刻体会到组合式API带来的开发效率提升。特别是配合ElementPlus这个UI库,简直就是后台管理系统开发的"黄金搭档"。…...

稳压二极管、TVS、ESD静电管的区别和应用场景
稳压二极管 也叫齐纳二极管,它的设计初衷就是用来稳压的。什么叫稳压?就是你给它一个变化的输入电压,它能在一定范围内给你输出一个相对固定的电压。 咱们看一下它的工作方式。稳压二极管是工作在反向击穿区的。当你给它加反向电压࿰…...

使用Spring AI Alibaba构建智能体Agent赡
背景 在软件开发的漫长旅途中,"构建"这个词往往让人又爱又恨。爱的是,一键点击,代码变成产品,那是程序员最迷人的时刻;恨的是,维护那一堆乱糟糟的构建脚本,简直是噩梦。 在很多项目中…...

【Shell专项】数组与函数的使用
第四章 数组和函数4.1 数组 4.1.1 简介 变量:用一个固定的字符串,代替一个不固定字符串。数组:用一个固定的字符串,代替多个不固定字符串。 4.1.2 类型 普通数组:只能使用整数作为数组索引关联数组:可以使用…...

Mininet实战指南:从基础命令到高级网络模拟
1. Mininet入门:基础命令与核心概念 第一次接触Mininet时,我完全被它模拟真实网络的能力震撼到了。这个轻量级网络仿真工具能在单台Linux机器上创建包含主机、交换机、控制器和链路的虚拟网络,特别适合做SDN开发和网络协议测试。记得当时为了…...
保姆级教程:用两张RTX 4090本地搭建企业级TranslateGemma翻译引擎
保姆级教程:用两张RTX 4090本地搭建企业级TranslateGemma翻译引擎 1. 为什么选择本地化翻译系统? 在当今全球化的工作环境中,高效准确的翻译工具已成为刚需。但常见的在线翻译服务存在几个痛点: 数据隐私风险:敏感技…...
和列式存储(Column-base Storage)简介蚜)
行式存储(Row-based Storage)和列式存储(Column-base Storage)简介蚜
1. 哑铃图是什么? 哑铃图(Dumbbell Plot),有时也称为DNA图或杠铃图,是一种用于比较两个相关数据点的可视化图表。 它源于人们对更有效数据比较方式的持续探索。 在传统的时间序列比较中,我们通常使用两条…...