ROS2中launch编写及参数含义(xml、python)
ROS2系列文章目录
ROS2中nav_msgs/msg/Path 数据含义及使用
ROS2中std_msgs/msg/Header 数据含义及使用
ROS中TF变换详解
文章目录
- ROS2系列文章目录
- ROS2中launch编写及参数含义(xml、python)
- 一、ROS官方介绍
- 二、实现案例
- 1.编写主函数、CMakeLists.txt及package.xml
- 2.编写启动节点的launch文件
- 3.编译并运行
ROS2中launch编写及参数含义(xml、python)
一、ROS官方介绍
ROS 2中的启动系统负责帮助用户描述其系统的配置,然后按描述执行。系统的配置包括运行什么程序,在哪里运行,传递什么参数,以及ROS特定的约定,这些约定通过为每个组件提供不同的配置,使其易于在整个系统中重用组件。它还负责监测启动过程的状态,并报告和/或对这些过程的状态变化作出反应。
ROS2官方说明:http://docs.ros.org/en/humble/Tutorials/Intermediate/Launch/Creating-Launch-Files.html#write-the-launch-file
二、实现案例
1.编写主函数、CMakeLists.txt及package.xml
此处创建learn_ros2功能包,在learn_ros2/src目录下建立main.cpp,该函数具体实现功能参照博文:ROS2中nav_msgs/msg/Path 数据含义及使用
#include <nav_msgs/msg/path.hpp>
#include <rclcpp/rclcpp.hpp>
#include <string>
#include <unistd.h>
using namespace std;
class My_node:public rclcpp::Node{
public:My_node(std::string node_name):Node(node_name){}
};
int main(int argc, char**argv){rclcpp::init(argc,argv);//节点初始化std::shared_ptr<My_node> node_ptr = std::make_shared<My_node>("test_node");rclcpp::Publisher<nav_msgs::msg::Path>::SharedPtr nav_pub = node_ptr->create_publisher<nav_msgs::msg::Path>("/global_path",1);nav_msgs::msg::Path path;geometry_msgs::msg::PoseStamped pose;path.header.frame_id = "world";while (rclcpp::ok()){path.header.stamp = node_ptr->now();path.poses.clear();for (int i = 0; i < 10; i++){pose.header.frame_id = "world";pose.header.stamp = node_ptr->now();pose.pose.position.set__x(i);pose.pose.position.set__y(0.2*i*i+2);pose.pose.position.set__z(0);pose.pose.orientation.set__x(0);pose.pose.orientation.set__y(0);pose.pose.orientation.z = 0;pose.pose.orientation.w = 1;path.poses.push_back(pose);}nav_pub->publish(path);sleep(1);std::cout<<"已发送path"<<std::endl;} std::cout<<"退出程序"<<std::endl;
}
指定功能包learn_ros2的CMakeLists.txt如下:
cmake_minimum_required(VERSION 3.8)
project(learn_ros2)if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(rclpy REQUIRED)
find_package(std_msgs REQUIRED)
find_package(nav_msgs REQUIRED)
if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)# the following line skips the linter which checks for copyrights# comment the line when a copyright and license is added to all source filesset(ament_cmake_copyright_FOUND TRUE)# the following line skips cpplint (only works in a git repo)# comment the line when this package is in a git repo and when# a copyright and license is added to all source filesset(ament_cmake_cpplint_FOUND TRUE)ament_lint_auto_find_test_dependencies()
endif()
#添加可执行文件名
add_executable(test_node src/main.cpp)
#给可执行文件链接ros2的标准库及其他依赖
ament_target_dependencies(test_node rclcpp std_msgs nav_msgs)
#将可执行文件安装在指定目录下
install(TARGETS test_node
DESTINATION lib/${PROJECT_NAME})
#将launch目录下的文件安装在指定目录下
install(DIRECTORY launchDESTINATION share/${PROJECT_NAME})
ament_package()2.编写启动节点的launch文件
在learn_ros2目录下建立launch文件夹,并在文件目录中新建python及xml文件如下:
test_launch.launch.py,test_xml_launch.xml
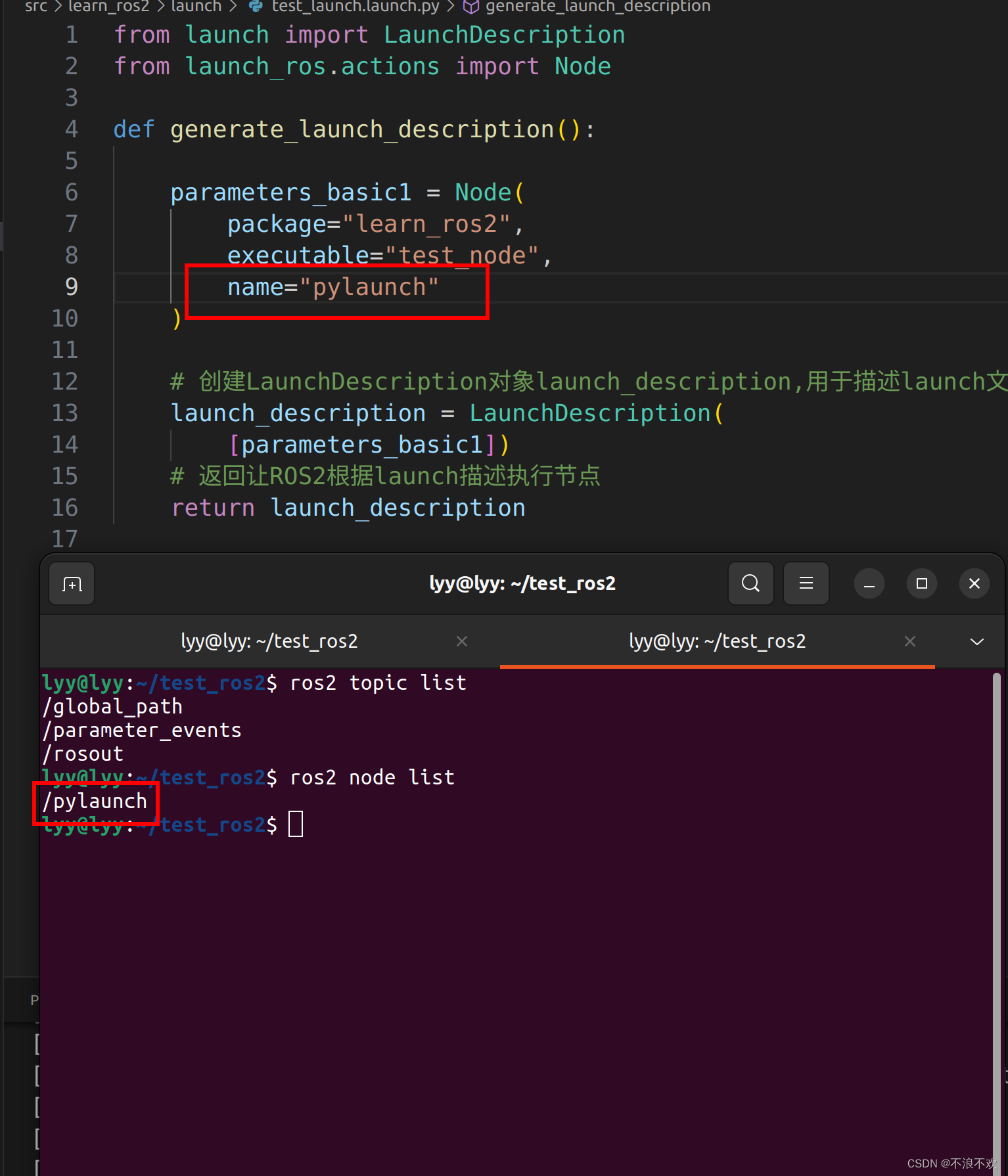
首先使用python实现test_launch.launch.py文件,具体含义参考注释
from launch import LaunchDescription
from launch_ros.actions import Nodedef generate_launch_description():parameters_basic1 = Node(package="learn_ros2",executable="test_node",)# 创建LaunchDescription对象launch_description,用于描述launch文件launch_description = LaunchDescription([parameters_basic1])# 返回让ROS2根据launch描述执行节点return launch_description
该处使用的url网络请求的数据。
使用XML实现test_xml_launch.xml文件,具体含义参考注释
<launch><!-- 启动节点,命名为/name1/test_node --><node pkg="learn_ros2" exec="test_node" name="test_node" namespace="name_1"/><!-- 启动节点,命名为/name2/test_node --><node pkg="learn_ros2" exec="test_node" name="test_node" namespace="name_2"/><!-- 启动节点,命名为/name3/test_node,同时将话题/global_path,映射为/test_node3/global_path--><node pkg="learn_ros2" exec="test_node" name="test_node" namespace="name_3"><remap from="/global_path" to="/test_node3/global_path"/></node> </launch>
3.编译并运行
注意:编写完成launch文件后,要使用ros2编译命令对功能包的可执行文件进行生成
使用test_xml_launch.xml启动各个程序
source install/setup.bash
ros2 launch learn_ros2 test_xml_launch.xml

使用test_launch.launch.py启动各个程序如下:
相关文章:
ROS2中launch编写及参数含义(xml、python)
ROS2系列文章目录 ROS2中nav_msgs/msg/Path 数据含义及使用 ROS2中std_msgs/msg/Header 数据含义及使用 ROS中TF变换详解 文章目录 ROS2系列文章目录ROS2中launch编写及参数含义(xml、python)一、ROS官方介绍二、实现案例1.编写主函数、CMakeLists.tx…...
鸿蒙Socket通信示例(TCP通信)
前言 DevEco Studio版本:4.0.0.600 参考链接:OpenHarmony Socket 效果 TCPSocket 1、bind绑定本地IP地址 private bindTcpSocket() {let localAddress resolveIP(wifi.getIpInfo().ipAddress)console.info("111111111 localAddress: " …...

yolov5-v6.0详细解读
yolov5-v6.0详细解读 一、yolov5版本介绍二、网络结构2.1 Backbone特征提取部分2.1.1 ConvBNSiLU模块2.1.2 C3模块2.1.2.1 BottleNeck模块 2.1.3 SPPF模块 2.2 Neck特征融合部分2.2.1 FPN2.2.2 PANet 2.3Head模块 三、目标框回归3.1 yolo标注格式3.2 yolov4目标回归框3.3 yolov…...
FPGA - 单总线协议(one-wire)
1,简介 单总线(one-wire)是美国 DALLAS 公司推出的外围串行扩展总线技术,与 SPI、I2C 等串行数据通信方式不同,它采用单根信号线,既传输时钟又传输数据,而且数据传输是双向的。它具有节省 I/O口…...
python的函数与类的定义
目录 1.函数 1.函数的定义 2.输入参数与输出参数的类型 3.输入和输出多个参数 1.普通参数 2.含有任意数量的参数 3.关键字参数 4.普通参数与多个参数的结合 2.类 1.类的定义 2.类的实例化 3.继承 1.函数 1.函数的定义 def 函数名(输入参数): 文档字符串 函数体 …...
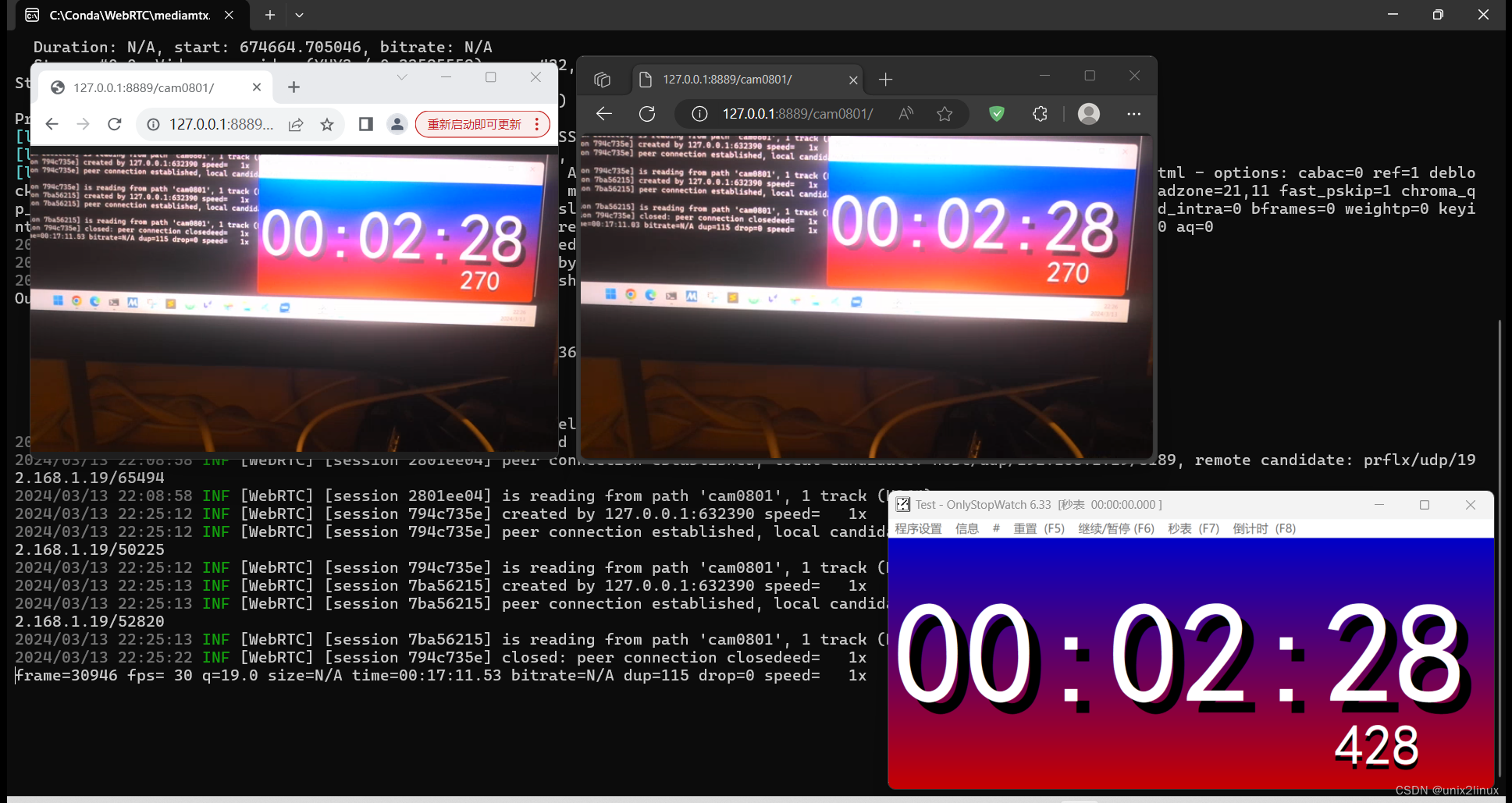
Parade Series - WebRTC ( < 300 ms Low Latency ) T.B.D
Parade Series - FFMPEG (Stable X64) C:\Conda\parading-cam>ffmpeg -f dshow -i video"Surface Camera Front" -vcodec libx264 -preset:v ultrafast -tune:v zerolatency -an -rtsp_transport tcp -f rtsp://127.0.0.1:8554/cam0801...
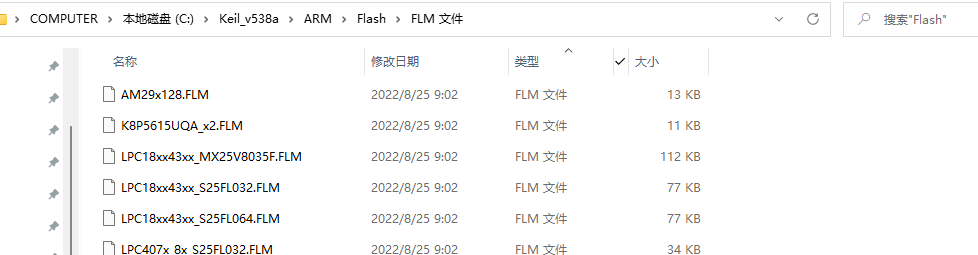
【ARM】MDK在programming algorithm界面添加FLM
【更多软件使用问题请点击亿道电子官方网站查询】 1、 文档目标 解决在programming algorithm界面中无法添加想要的Flash编程算法的问题 2、 问题场景 在对于Debug进行Flash Download进行配置的时候,在programming algorithm界面中有对应的Flash编程算法。可以通过…...
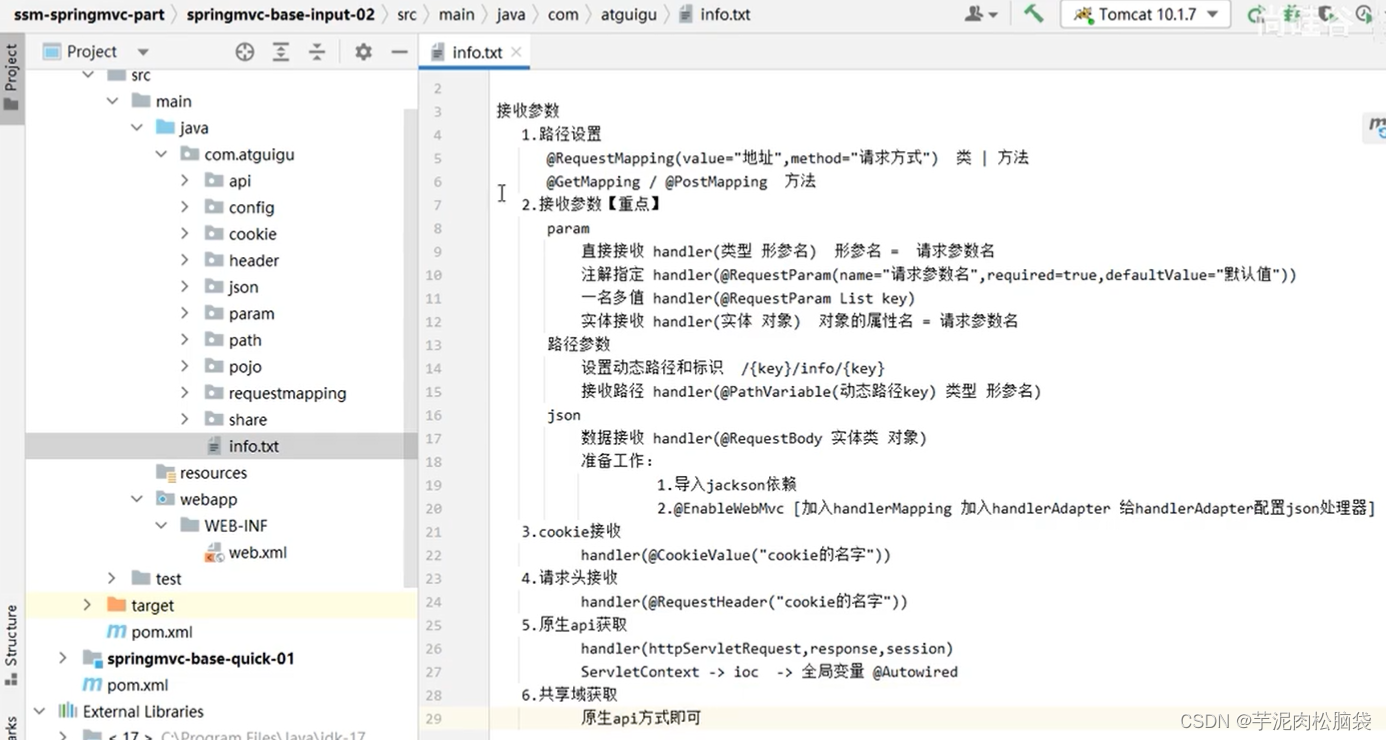
springmvc学习笔记1
springmvc学习笔记part1 总概述图创建步骤创建project并在父工程中导入配置类添加为web工程检查maven配置写handller方法写配置类SpringMVC环境搭建项目部署关键步骤总结 具体设置路径设置注解接收参数(重点param参数接收路径参数接收json参数接收请求头接收和cooki…...
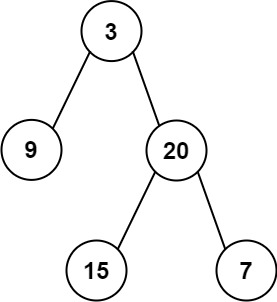
力扣106 从中序与后续遍历序列构造二叉树
文章目录 题目描述解题思路代码 题目描述 给定两个整数数组 inorder 和 postorder ,其中 inorder 是二叉树的中序遍历, postorder 是同一棵树的后序遍历,请你构造并返回这颗 二叉树 。 示例 1: 输入:inorder [9,3,15,20,7], …...
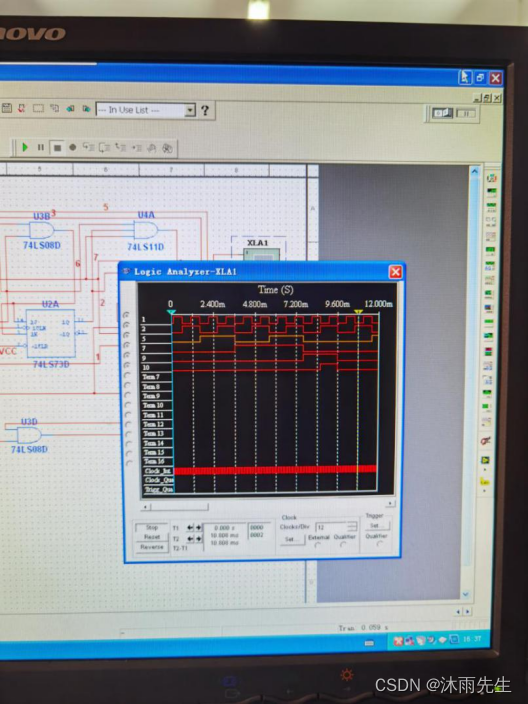
数字逻辑-时序逻辑电路一
一、实验目的 (1)熟悉触发器的逻辑功能及特性。 (2)掌握集成D和JK触发器的应用。 (3)掌握时序逻辑电路的分析和设计方法。 二、实验仪器及材料 三、实验内容及步骤 1、用D触发器(74LS74&am…...
web 课程
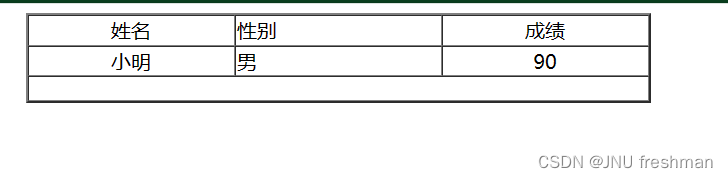
文章目录 格式图片超链接书签链接表格例子横跨束跨 格式 <br /> <br/> #换行图片 <img> 标签是用于在网页中嵌入图像的 HTML 标签,它有一些属性可以用来控制图像的加载、显示和交互。以下是对 <img> 标签常用属性的详细介绍:…...

工业园区智慧水电设备管控系统
在现代工业园区中,水电设备的管控系统起着至关重要的作用。这些系统不仅仅是简单的机械装置,它们更是一种智慧的结合,为工业生产提供了可靠的保障和高效的管理。让我们一起来探索工业园区智慧水电设备管控系统的奥秘。 我们来看看水电设备的…...

Git之版本回退
文章转载于:https://www.jianshu.com/p/3020740561a8 以前,如果是要去除某一块功能,我都是选择性删除,选择性注释,然后前后逻辑各种查看,各种比较。每一次,改完这些我总感觉心好累啊!…...
)
「jQuery系列」jQuery 校验表单(Validate)
文章目录 一、校验表单(Validate)1. 基本用法2. 验证规则3. 国际化4. 插件扩展 二、Validate常用方法1. 基本验证2. 自定义验证规则3. 远程验证(通过 AJAX)4. 提交处理(submitHandler)5. 忽略某些元素的验证…...
【Java设计模式】十九、中介者模式
文章目录 1、中介者模式2、案例3、总结 1、中介者模式 如图: 同事类之间关联较多时,整体出现网状结构,耦合度极高。一个对象一变动,好多对象都得改。若变为右边的星形结构,则一个类的变动,只影响自身与中介…...

这个学习Python的神仙网站,后悔没早点发现
Python 作为时下最流行的编程语言,很多初学者都将它作为自学编程的首选。不管是有编程经验的开发者,还是新手小白,在这个 AIGC 时代, Python 都可以带你探索新世界。 入门 Python 绝非难事,但如何让自己坚持学下去是如…...

牛津大学“领域驱动设计”课程
领域驱动设计(“DDD”)是一种专注于系统领域而不是技术的软件设计方法。重点是构建共享的心理模型并以尽可能简单的方式在代码中表示该领域模型。数据库存储、框架等技术细节被认为是设计的次要方面。该模块将重点关注 DDD 和一般设计以及相关主题&#…...
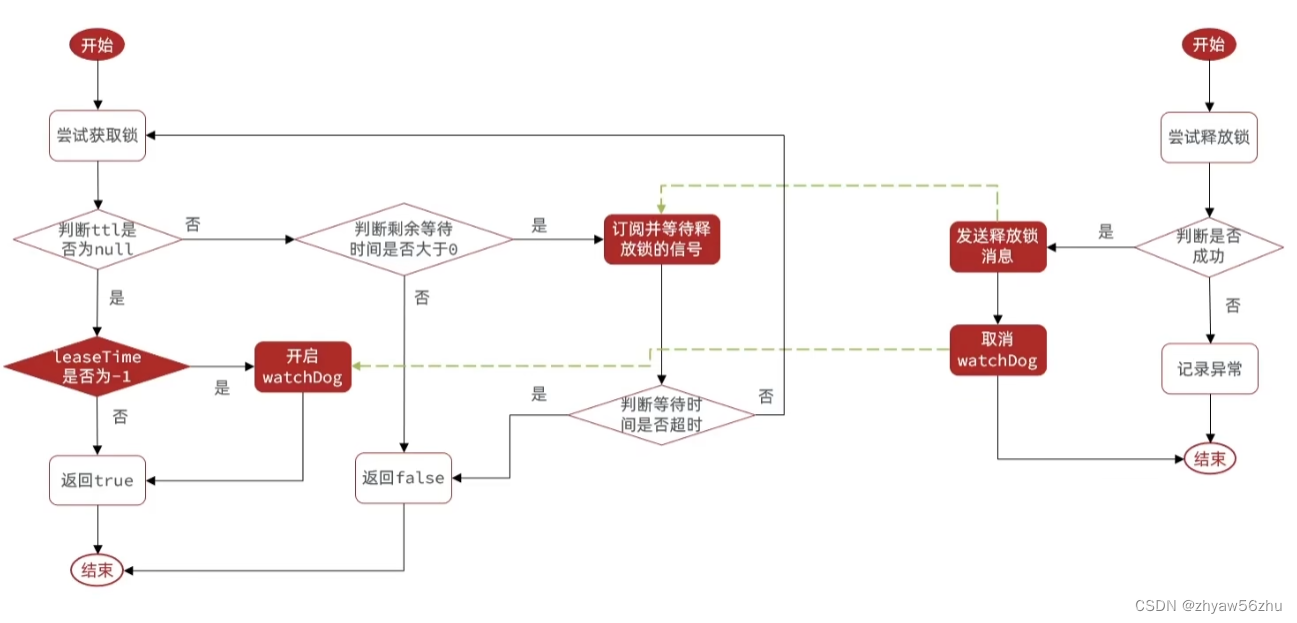
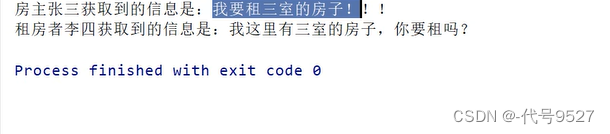
Redisson分布式锁解决方案
官方地址 官网: https://redisson.org github: https://github.com/redisson/redisson 基于setnx实现的分布式锁存在的问题 redisson分布式锁原理 不可重入: 利用hash结构记录线程id和重入次数不可重试: 利用信号量和PubSub功能实现等待、唤醒, 获取锁失败的重试机制超时释放…...
linux命令深入研究——cat
cat命令,“猫”,可以理解为瞄一眼文件内容,其中可以用重定向符号对文件进行一些修改,如增加,删除文件内容,其命令参数如-n,-s,-b可以输出带有行号的行 如果想要快速删除文件内容&…...

代码随想录算法训练营第40天|343. 整数拆分、96.不同的二叉搜索树
343. 整数拆分 题目链接:link 文章讲解:link 视频讲解:link 一、做题感受&第一想法 其实第一反应是回溯……但感觉每层的集合都会很繁琐 二、学习文章后收获 1.动态规划思路 动规五要素分析 dp和i的定义:dp[i]指把i拆分后最…...

Python PIL 画矩形框
基础代码 from PIL import Image, ImageDraw# 打开图片 img Image.open(your_image.jpg)# 创建绘图对象 draw ImageDraw.Draw(img)# 矩形坐标 (x1, y1, x2, y2) coords (23, 21, 69, 76)# 画矩形框(红色,线宽2) draw.rectangle(coords, ou…...
到panic:深入Linux 5.4内核,看异常处理如何层层递进)
从BUG()到panic:深入Linux 5.4内核,看异常处理如何层层递进
从BUG()到panic:Linux内核异常处理的防御体系全解析当你在深夜调试一个内核模块时,突然屏幕刷出一串红色警告——这可能是每个Linux内核开发者都经历过的噩梦时刻。但你是否想过,从第一行警告出现到系统完全崩溃,内核究竟经历了怎…...

2026论文降AI怎么挑?亲测好用工具附免费降AI指南
“您的论文AIGC率为42%,超出学校30%的合格线,请修改后重新提交。”赶毕业论文的同学这段时间估计没少收到这样的提醒。2026年知网、万方、维普等主流平台的AI检测算法持续迭代,把AI生成内容改到符合学校要求,已经成了毕业生的刚需…...

从安装到排错:手把手解决Linux服务器上Nacos启动失败的十大常见问题
从安装到排错:手把手解决Linux服务器上Nacos启动失败的十大常见问题当你在Linux服务器上部署Nacos时,是否遇到过启动失败却无从下手的困境?作为阿里巴巴开源的服务发现和配置管理平台,Nacos在微服务架构中扮演着重要角色。然而&am…...

别再死记公式了!用Python手写一个卷积层,彻底搞懂CNN里的‘卷’是怎么算的
用Python手写卷积层:从零理解CNN的"卷"运算 当你第一次看到卷积神经网络(CNN)的数学公式时,那些复杂的符号和下标是否让你望而却步?作为计算机视觉领域的基石,CNN的核心在于理解卷积运算的本质。本文将带你用NumPy从零实…...

HiveWE终极指南:快速掌握魔兽争霸III现代化地图编辑器
HiveWE终极指南:快速掌握魔兽争霸III现代化地图编辑器 【免费下载链接】HiveWE A Warcraft III world editor. 项目地址: https://gitcode.com/gh_mirrors/hi/HiveWE 还在为传统魔兽争霸III地图编辑器缓慢的加载速度和复杂的操作界面而烦恼吗?Hiv…...

别再手动维护接口文档了!用Spring Boot 3和Swagger 3实现代码与文档的自动同步
Spring Boot 3与Swagger 3:构建零维护成本的API文档工作流 每次接口变更都要手动更新文档?团队成员总是抱怨文档与实际接口不一致?在敏捷开发时代,传统文档维护方式已成为拖累工程效率的典型痛点。本文将揭示如何通过Spring Boot …...

qobuz-dl终极实战指南:专业无损音乐下载工具架构解析与高效应用
qobuz-dl终极实战指南:专业无损音乐下载工具架构解析与高效应用 【免费下载链接】qobuz-dl A complete Lossless and Hi-Res music downloader for Qobuz 项目地址: https://gitcode.com/gh_mirrors/qo/qobuz-dl 在数字音乐时代,追求极致音质的音…...

ZYNQ中断避坑指南:PL端信号线如何正确‘连线’到PS端处理函数?
ZYNQ中断系统深度解析:从硬件信号到软件响应的全链路实践 在嵌入式系统开发中,中断处理是实时响应的核心机制。对于ZYNQ这种集成了ARM处理器(PS)和可编程逻辑(PL)的异构计算平台,其中断系统既有传统处理器的特性,又具备FPGA灵活定…...
)
第 2 期:广告视觉提效:FastAPI+LangChain 对接豆包图片模型(附完整代码)
https://mp.weixin.qq.com/s/El8_eV3wYCW-OPungbt7ng...