STM32模拟SPI时序控制双路16位数模转换(16bit DAC)芯片DAC8552电压输出
STM32模拟SPI时序控制双路16位数模转换(16bit DAC)芯片DAC8552电压输出
STM32部分芯片具有12位DAC输出能力,要实现16位及以上DAC输出需要外挂DAC转换ASIC。
DAC8552是双路16位DAC输出芯片,通过SPI三线总线进行配置控制输出。这里介绍通过GPIO管脚模拟时序进行控制的方式。
电路连接
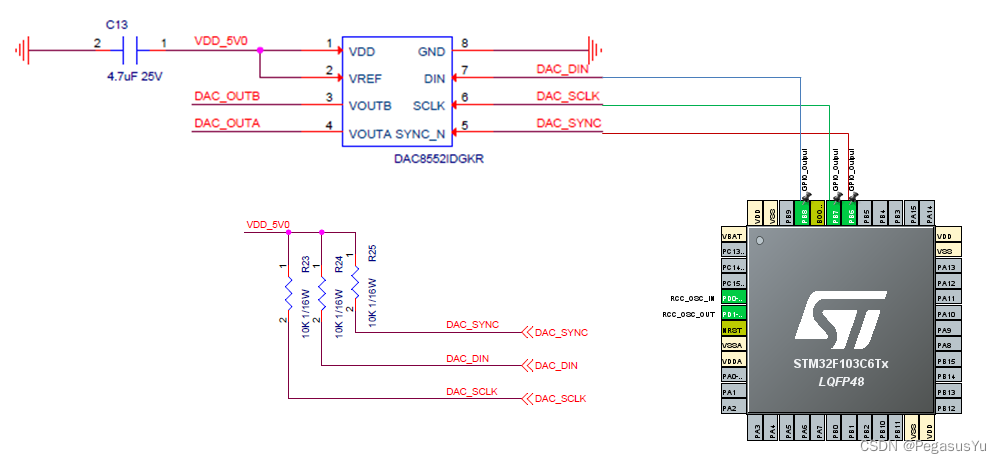
DAC8552支持2.7V~5.5V的供电,根据需要提供电源电压,对于STM32可能面对不同供电电压的DAC8552, 因此STM32与DAC8552连接的三线,可以用10K电阻上拉到DAC8552的供电电压,而STM32选择支持FT(5V耐压)的三个管脚,并采用Open-drain无上下拉输出模式,从而可以兼容在各种供电条件下的DAC8552访问控制。对于STM32F103可以采用PB6, PB7和PB8进行连接,对于5V供电的DAC8552的连接如下图所示:
DAC8552控制协议
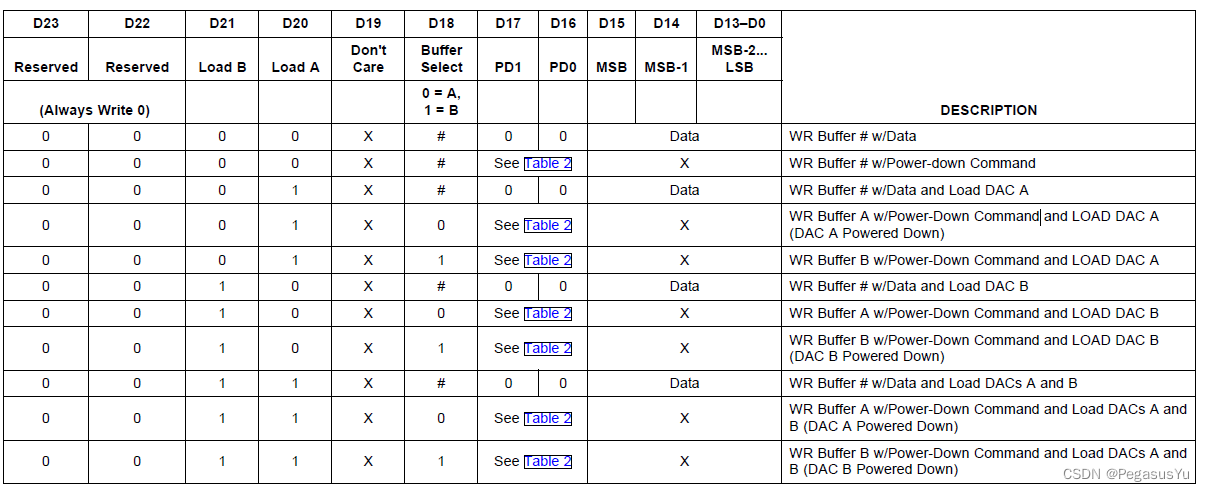
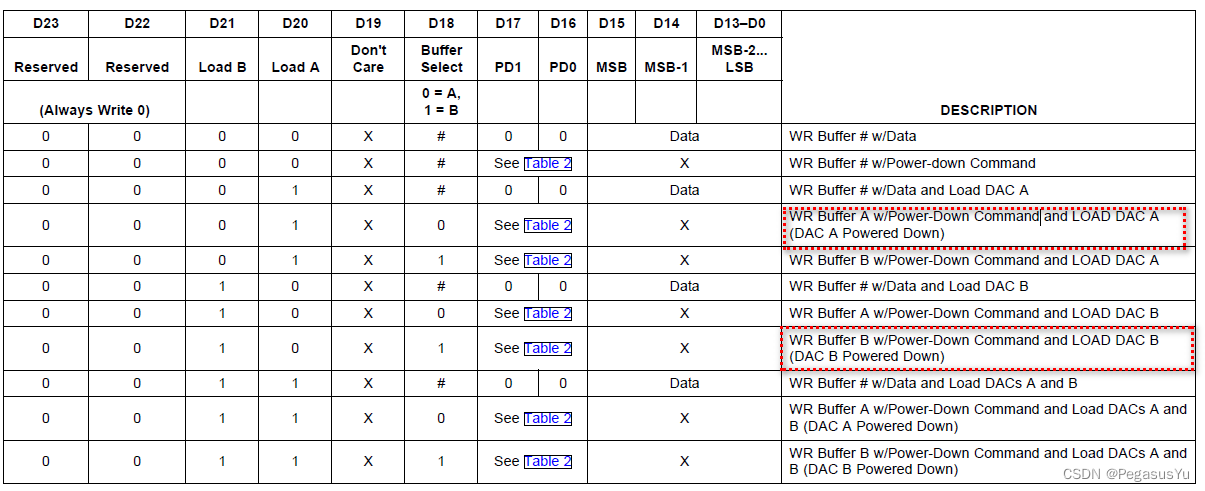
STM32通过发送24个位的SPI数据控制DAC8552的工作状态。其中前16个位为单路(通道A或通道B)的DAC配置值,后8个位为控制指令。
协议控制操作主要由两部分操作构成:
- 发送24位数据到某个通道的buffer
- 执行buffer里24位数据里的控制指令,即"load"某个通道,指令可能是通道关电,也可能是DAC电压根据配置数据值输出
在关电模式可以配置通道管脚处于1K下拉,100K下拉或高阻状态。操作方式比较多,如下图所示:

可以进行简化,对于通道配置只采用这几种指令:
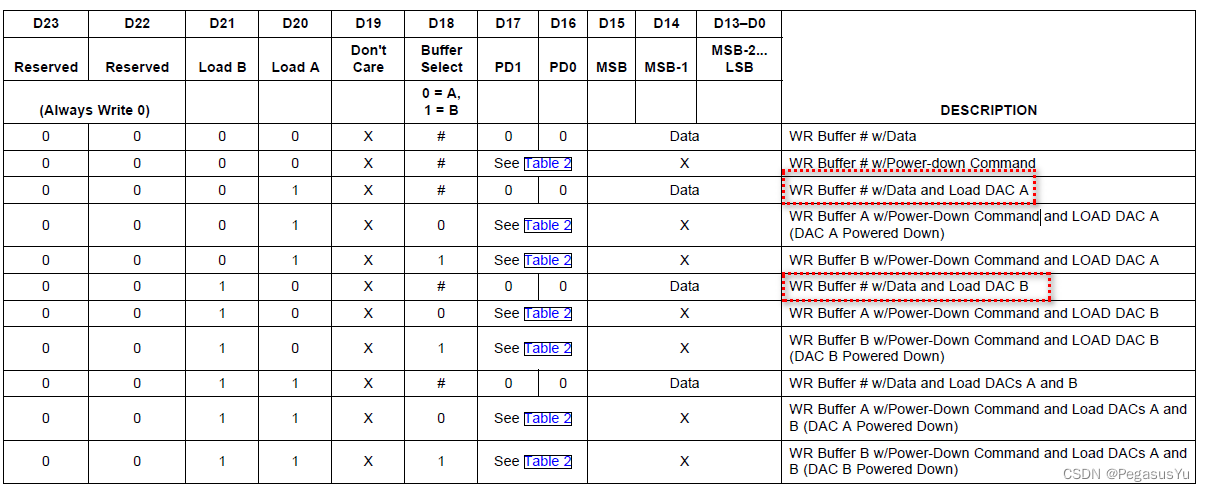
对于通告关电只采用这几种:
STM32CUBEIDE工程配置
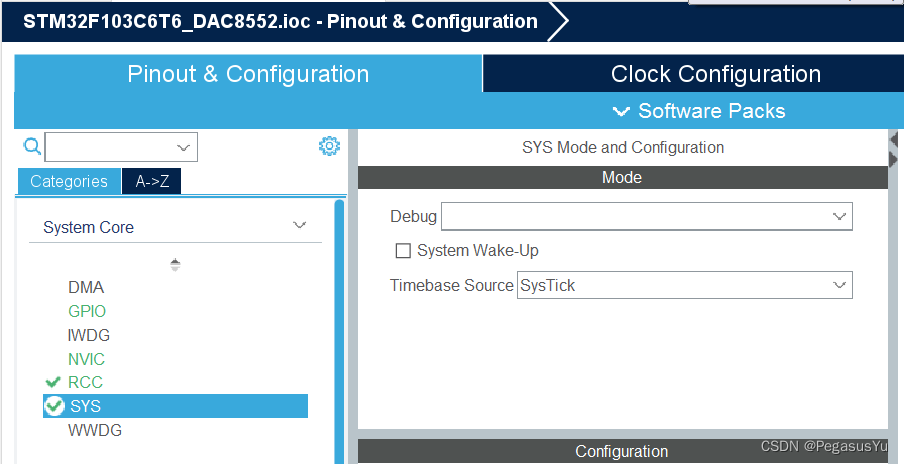
这里采用STM32CUBEIDE,对STM32F103C6T6芯片进行HAL库工程配置。
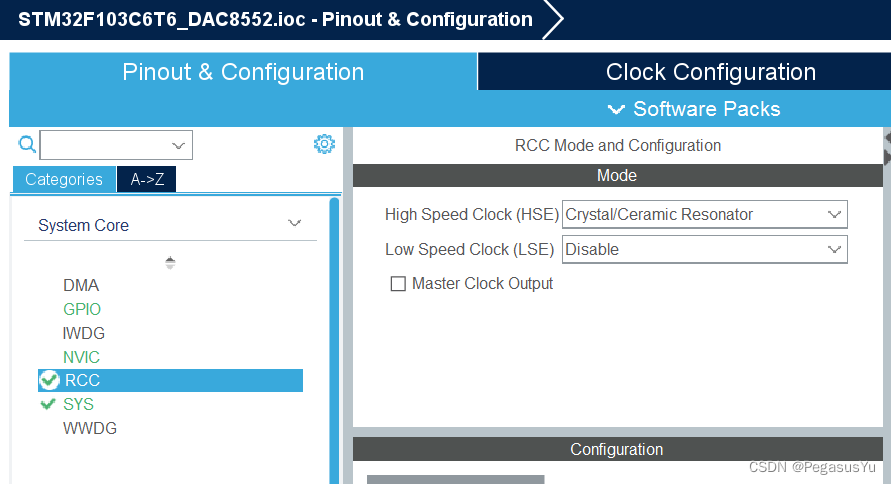
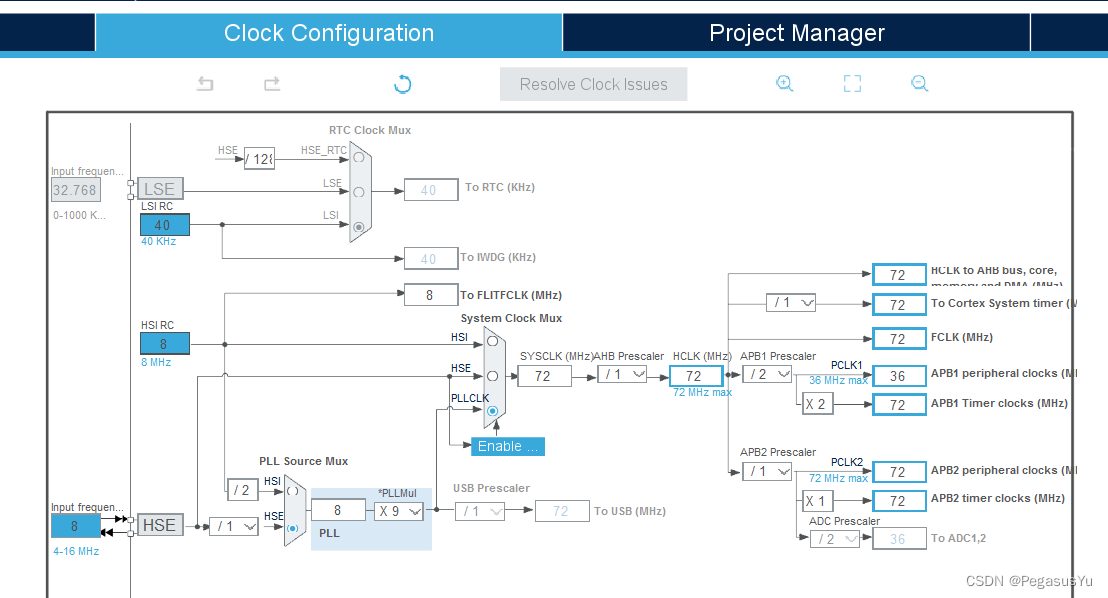
首先配置时钟系统:
然后配置三线的管脚:
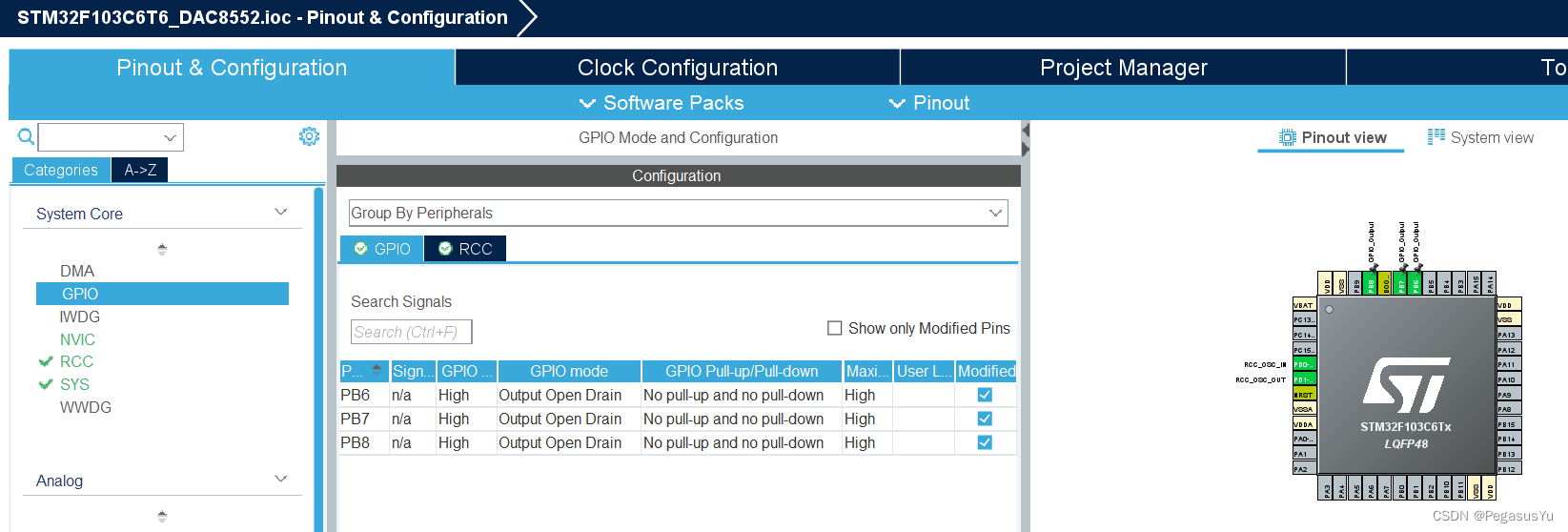
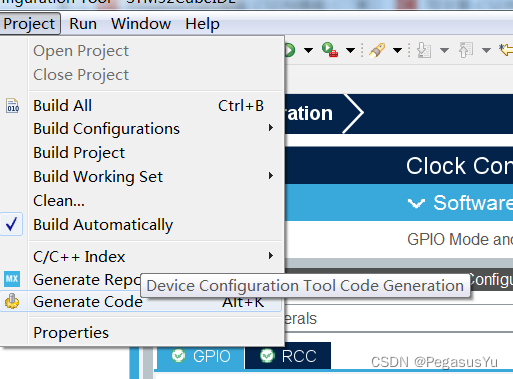
保存并生成基本:
STM32工程代码
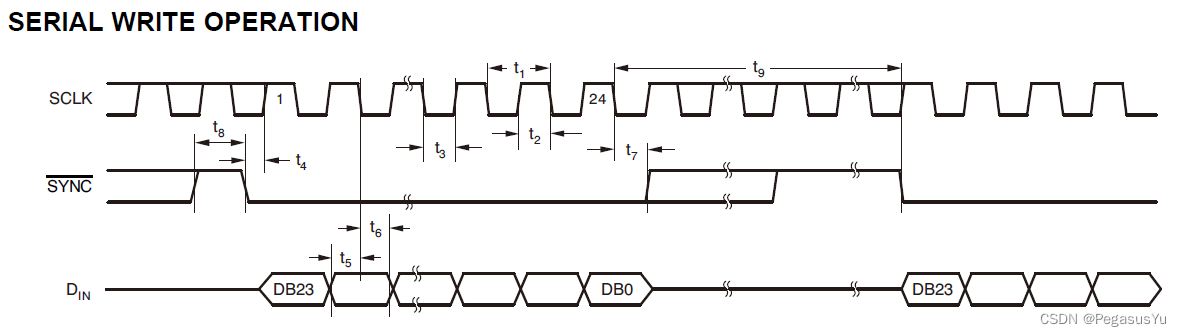
SPI三线只向DAC8552单向发送数据进行控制。在SYNC即片选低电平期间,每个SCLK时钟下降沿DAC8552采样输入数据。
这里采用的微秒级延时函数,参考 STM32 HAL us delay(微秒延时)的指令延时实现方式及优化 。
首先定义管脚输出态:
#define DAC8552_SYNC_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
#define DAC8552_SYNC_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
#define DAC8552_DIN_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET);
#define DAC8552_DIN_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET);
#define DAC8552_SCLK_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
#define DAC8552_SCLK_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
然后编写通道输出配置函数, 这里提供单通道和双通道配置的函数,以及单通道和双通道关电的函数:
void DAC8552_Set_Channel_A(uint16_t Data)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x10;WriteData = (CMD<<16) | Data;DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts
}void DAC8552_Set_Channel_B(uint16_t Data)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x24;WriteData = (CMD<<16) | Data;DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts
}void DAC8552_Set_Channel_AB(uint16_t Data)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x10;WriteData = (CMD<<16) | Data;DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;CMD = 0x24;WriteData = (CMD<<16) | Data;DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts
}void DAC8552_Set_PowerDown_1K_A(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x11;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_1K_B(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x25;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_1K_AB(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x11;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;CMD = 0x25;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_100K_A(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x12;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_100K_B(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x26;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_100K_AB(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x12;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;CMD = 0x26;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_Hz_A(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x13;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_Hz_B(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x27;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_Hz_AB(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x13;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;CMD = 0x27;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}
就可以进行函数调用实现控制DAC8552双路的电压输出值。如控制A路为DAC8552参考电压的1/2, B路输出为DAC8552参考电压的3/4:
DAC8552_Set_Channel_A(32768);DAC8552_Set_Channel_B(49152);
完整的main.c代码如下:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2022 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
__IO float usDelayBase;
void PY_usDelayTest(void)
{__IO uint32_t firstms, secondms;__IO uint32_t counter = 0;firstms = HAL_GetTick()+1;secondms = firstms+1;while(uwTick!=firstms) ;while(uwTick!=secondms) counter++;usDelayBase = ((float)counter)/1000;
}void PY_Delay_us_t(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);delayReg = 0;while(delayReg!=usNum) delayReg++;
}void PY_usDelayOptimize(void)
{__IO uint32_t firstms, secondms;__IO float coe = 1.0;firstms = HAL_GetTick();PY_Delay_us_t(1000000) ;secondms = HAL_GetTick();coe = ((float)1000)/(secondms-firstms);usDelayBase = coe*usDelayBase;
}void PY_Delay_us(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t msNum = Delay/1000;__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);if(msNum>0) HAL_Delay(msNum);delayReg = 0;while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define DAC8552_SYNC_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
#define DAC8552_SYNC_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
#define DAC8552_DIN_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET);
#define DAC8552_DIN_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET);
#define DAC8552_SCLK_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
#define DAC8552_SCLK_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);void DAC8552_Set_Channel_A(uint16_t Data)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x10;WriteData = (CMD<<16) | Data;DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts
}void DAC8552_Set_Channel_B(uint16_t Data)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x24;WriteData = (CMD<<16) | Data;DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts
}void DAC8552_Set_Channel_AB(uint16_t Data)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x10;WriteData = (CMD<<16) | Data;DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;CMD = 0x24;WriteData = (CMD<<16) | Data;DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts
}void DAC8552_Set_PowerDown_1K_A(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x11;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_1K_B(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x25;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_1K_AB(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x11;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;CMD = 0x25;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_100K_A(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x12;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_100K_B(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x26;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_100K_AB(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x12;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;CMD = 0x26;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_Hz_A(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x13;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_Hz_B(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x27;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}void DAC8552_Set_PowerDown_Hz_AB(void)
{uint8_t CMD = 0;uint32_t WriteData = 0;__disable_irq() ; //disable all interruptsCMD = 0x13;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;CMD = 0x27;WriteData = (CMD<<16);DAC8552_SYNC_HIGH;PY_Delay_us_t(1);DAC8552_SYNC_LOW;for(uint8_t i=0;i<24;i++){if( (WriteData << i) & 0x800000 ){DAC8552_DIN_HIGH;}else{DAC8552_DIN_LOW;}DAC8552_SCLK_HIGH;PY_Delay_us_t(1);DAC8552_SCLK_LOW;PY_Delay_us_t(1);}DAC8552_SYNC_HIGH;__enable_irq() ; //enable all interrupts}
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM *//* USER CODE END PM *//* Private variables ---------------------------------------------------------*//* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *//* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();/* USER CODE BEGIN 2 */PY_usDelayTest();PY_usDelayOptimize();DAC8552_Set_Channel_A(32768);DAC8552_Set_Channel_B(49152);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){PY_Delay_us_t(1000000);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOD_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8, GPIO_PIN_SET);/*Configure GPIO pins : PB6 PB7 PB8 */GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */STM32例程下载
STM32F103C6T6模拟SPI时序控制DAC8552电压输出例程
–End–
相关文章:
STM32模拟SPI时序控制双路16位数模转换(16bit DAC)芯片DAC8552电压输出
STM32模拟SPI时序控制双路16位数模转换(16bit DAC)芯片DAC8552电压输出 STM32部分芯片具有12位DAC输出能力,要实现16位及以上DAC输出需要外挂DAC转换ASIC。 DAC8552是双路16位DAC输出芯片,通过SPI三线总线进行配置控制输出。这里…...
基于intel x86+fpga智能驾驶舱和高级驾驶辅助系统硬件设计(二)
系统功能架构及各模块功能介绍 智能驾驶舱和高级驾驶辅助系统是一个车载智能终端嵌入式平台,系统是一个能够运行 虚拟化操作系统的软件和硬件的综合体。本文的车载主机包括硬件主控处理器、电源管理芯 片、存储设备、输入输出控制器、数字仪表系统系统、后座娱乐系统…...
oneblog_justauth_三方登录配置【Github】
文章目录oneblog添加第三方平台github中创建三方应用完善信息登录oneblog添加第三方平台 1.oneblog管理端,点击左侧菜单 网站管理——>社会化登录配置管理 ,添加一个社会化登录 2.编辑信息如下,选择github平台后复制redirectUri,然后去github获取cl…...

自行车轮胎充气泵PCBA方案
轮胎充气泵PCBA方案由多种元器件设计组合而成,PCBA是英文Printed Circuit Board Assembly 的简称,也就是说PCB空板经过SMT上件,或经过DIP插件的整个制程,简称PCBA。PCBA是一个电子产品功能实现的最原始的状态,未经过任…...

200 22222
101. blob.png 新到组织的项目经理被分配管理一个具有多名干系人的项目。项目经理希望确定哪些干系人是内部的,哪些干系人是外部的。若要了解干系人的角色,项目经理应该查阅哪一份文件? A. 干系人登记册 B. 干系人分析 C. 干系人管理计划 D.…...
<JVM上篇:内存与垃圾回收篇>13 - 垃圾回收器
笔记来源:尚硅谷 JVM 全套教程,百万播放,全网巅峰(宋红康详解 java 虚拟机) 文章目录13.1. GC 分类与性能指标13.1.1. 垃圾回收器概述13.1.2. 垃圾收集器分类13.1.3. 评估 GC 的性能指标13.2. 不同的垃圾回收器概述13.…...

广义状态平均法功率变换器建模分析
两种状态平均法在功率变换器建模的应用比较 [!info] Bibliography [1] 高朝晖, 林辉张晓斌 & 吴小华, “两种状态平均法在功率变换器建模的应用比较,” 计算机仿真, no. 241-244248, 2008. [!note] 状态空间平均法采用直流量近似(线性系统模型)&…...

基于Spring Boot的快递管理系统
文章目录 项目介绍主要功能截图:登录我要收件我要寄件个人信息我收到的我寄出的物流管理用户管理部分代码展示设计总结项目获取方式🍅 作者主页:Java韩立 🍅 简介:Java领域优质创作者🏆、 简历模板、学习资料、面试题库【关注我,都给你】 🍅文末获取源码联系🍅 项…...
)
nerdctl不完全使用指南(开发者)
目录 背景 环境配置 1.编译golang可执行文件 2.快速构建镜像 背景 k8s在1.22版本放弃docker作为runtime后采用了containerd,以containerd作为runtime的k8s安装方法已经出现了很多开源集成工具或者解决方案,在此不做赘述。本篇只要是描述在docker被取…...
)
【独家】华为OD机试 - 分糖果(C 语言解题)
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南)华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明本期…...
八股总结(二)计算机网络与网络编程
layout: post title: 八股总结(二)计算机网络与网络编程 description: 八股总结(二)计算机网络与网络编程 tag: 八股总结 文章目录计算机网络网络模型网络体系结构在浏览器输入一个网址后回车,背后都发生了什么&#x…...

ChatGPT 一本正经的胡说八道 那也看看原理吧
最近,ChatGPT横空出世。这款被马斯克形容为“强大到危险”的AI,不但能够与人聊天互动,还能写文章、改代码。于是,人们纷纷想让AI替自己做些什么,有人通过两分钟的提问便得到了一篇完美的论文,有人希望它能帮…...

ChatGPT:一个人机环境系统交互的初级产品
从人机环境系统智能的角度看,Chatgpt就是一个还没有开始上道的系统。“一阴一阳之谓道”,Chatgpt的“阴”(默会隐性的部分)尚无体现,就是“阳”(显性描述的部分)还停留在人类与大数据交互的浅层…...

PaddlePaddle本地环境安装(windows11系统)
写在前面: 这里是关于win11安装PaddlePaddle的步骤和方法,建议参考官方的方法。截止2023年3月份,PaddlePaddle的版本是2.4.2。 官方参考:飞桨PaddlePaddle快速安装使用方法 建议使用Anaconda安装 ,关于Anaconda创建环境的可以借鉴:深度学习Anaconda环境搭建(比较全面)…...
DBeaver 超级详细的安装与使用
一、下载DBeaver DBeaver是一种通用数据库管理工具,适用于需要以专业方式使用数据的每个人;适用于开发人员,数据库管理员,分析师和所有需要使用数据库的人员的免费(DBeaver Community) 的多平台数据库工具。 DBeaver支持80多个数据…...
计算机网络的166个概念 你知道几个第七部分
计算机网络传输层 可靠数据传输:确保数据能够从程序的一端准确无误的传递给应用程序的另一端。 容忍丢失的应用:应用程序在发送数据的过程中可能会存在数据丢失的情况。 非持续连接:每个请求/响应会对经过不同的连接,每一个连接…...

海尔三翼鸟:生态聚拢的密度,决定场景落地速度
最近学到一个新词,叫做涌现能力。 怎么理解呢?我们以当下最火的ChatGPT为例,GPT1模型是1.17亿参数,GPT2有15亿参数,GPT3有1750亿个参数。研究人员在放大模型规模的进程中发现一个惊人的现象,模型参数达到一…...
前端基础知识
文章目录前端基础知识HTML1. html基本结构2.常见的html标签注释标签标题标签(h1~h6)段落标签p换行标签 br格式化标签图片标签:img超链接标签表格标签列表标签表单标签input标签label标签select标签textarea 标签盒子标签div&span3. html特殊字符CSS1. 基本语法2…...

LiveData 面试题库、解答、源码分析
引子LiveData 是能感知生命周期的,可观察的,粘性的,数据持有者。LiveData 用于以“数据驱动”方式更新界面。换一种描述方式:LiveData 缓存了最新的数据并将其传递给正活跃的组件。关于数据驱动的详解可以点击我是怎么把业务代码越…...

kotlin用object实现单例模式,companion object与java静态
kotlin用object实现单例模式,companion object与java静态 kotlin中很容易使用object实现java中的单例模式。由于kotlin中没有static修饰词,可以用companion object实现Java中的static效果。 //object相当于java的单例 object Singleton {var count: In…...

深圳市2026年打造人工智能先锋城市项目扶持计划申请指南
本项目扶持计划下设十个项目类别,均采用事后奖补类支持方式。1、申报单位需同时满足基础申报条件和专项申报条件。基础申报条件如下:(一)申报单位为在深圳市内(含深汕特别合作区)从事生产经营活动ÿ…...

Beige CSS框架:现代CSS Grid与变量驱动的极简前端开发实践
1. 项目概述:一个被低估的现代CSS框架如果你和我一样,在过去的几年里,已经厌倦了Bootstrap、Tailwind CSS这些“巨无霸”框架带来的审美疲劳和项目同质化,同时又对从零开始手写CSS的繁琐感到头疼,那么今天聊的这个项目…...

明日方舟素材库:从游戏资产到创意引擎的技术解密
明日方舟素材库:从游戏资产到创意引擎的技术解密 【免费下载链接】ArknightsGameResource 明日方舟客户端素材 项目地址: https://gitcode.com/gh_mirrors/ar/ArknightsGameResource 在数字创作的广阔天地中,专业级游戏素材往往被锁在商业游戏的围…...

WebToEpub:3分钟将网页小说转为EPUB电子书的终极解决方案
WebToEpub:3分钟将网页小说转为EPUB电子书的终极解决方案 【免费下载链接】WebToEpub A simple Chrome (and Firefox) Extension that converts Web Novels (and other web pages) into an EPUB. 项目地址: https://gitcode.com/gh_mirrors/we/WebToEpub 还在…...
)
零代码也能做游戏?用UE5蓝图系统10分钟做个会转的潜艇(附完整资产包)
零代码游戏开发:用UE5蓝图10分钟打造动态潜艇 当第一次打开虚幻引擎5时,许多初学者会被其庞大的功能体系所震撼——从影视级的光照系统到数百万面的高精度模型渲染,这款引擎几乎能实现任何你能想象到的视觉效果。但更令人惊喜的是,…...

ARM CoreSight ROM Tables解析与调试实践
1. ARM CoreSight ROM Tables基础解析在嵌入式调试领域,ARM CoreSight架构提供了一套完整的调试与追踪解决方案。作为该架构的关键组成部分,ROM Tables扮演着系统调试资源的"目录"角色。想象一下走进一个巨大的图书馆,ROM Tables就…...

ARIS:基于技能化工作流的AI自主研究系统设计与实践
1. 项目概述:ARIS,一个让AI在你睡觉时做研究的自主工作流 如果你是一名机器学习或计算机科学领域的研究者,我猜你肯定有过这样的体验:一个绝妙的想法在深夜闪现,你兴奋地爬起来记下几行潦草的笔记,然后第二…...

Android自动化测试代理droidrun-agent:原理、实现与工程实践
1. 项目概述:一个面向Android应用的自动化测试代理在移动应用开发与测试领域,自动化测试是保障应用质量、提升迭代效率的核心环节。对于Android平台,虽然官方提供了Espresso、UI Automator等成熟的测试框架,但在面对复杂业务场景、…...

卡梅德生物技术快报|噬菌体肽库展示技术:细胞穿透肽筛选全流程技术实现
1. 问题背景(技术痛点) 细胞递送领域面临三大技术瓶颈: 穿透肽靶向性差,非特异性结合严重;传统筛选流程复杂,周期长、通量低;缺乏标准化验证体系,实验难以复现。噬菌体肽库展示技术…...

ARM Cortex-M0+极限性能优化:从超频到外设压榨的嵌入式实战
1. 项目概述:一次基于经典平台的极限性能探索“飞思卡尔Freedom打造新记录!”这个标题,对于很多嵌入式领域的老兵而言,瞬间就能勾起一段充满挑战与激情的回忆。飞思卡尔(Freescale,现为NXP的一部分…...