代码分享:面波数据快速成图
代码分享:面波数据快速成图
前言
目前,物探数据主要用surfer软件成图,surfer软件具有强大的插值和绘图功能,成图比较美观。但是,生产过程中大量的物探数据,依靠excel和surfer来成图耗费人力时间成本。本博文在MATLAB平台上开发了一套用于面波数据快速成图的小程序,仅供大家借鉴。
文章目录
- 代码分享:面波数据快速成图
- 前言
- 1、成图效果展示
- 1.1 原始图像
- 1.2 高程转换
- 1.3 里程换算
- 1.4 图像加工
- 2、数据读取与图像保存
- 2.1 读取面波视横波速度数据
- 2.2 数据与图像保存
- 3、自编函数
- 3.1 dealMBdata函数
- 3.2 cellcell2mat函数
- 3.3 sInterp函数
- 3.4 sLcLabel函数
- 4、完整代码
- 代码运行过程中如果出现bug,请依据实际工程修改。
1、成图效果展示
1.1 原始图像
对面波数据采用geogiga软件反演,导出视横波数据,在matlab中编辑克里金插值算法的代码,输出图像。

1.2 高程转换
将地表GPS测量的高程,与面波探测的深度进行转换,得到真实的高程。

1.3 里程换算
将地表GPS测量的里程与高程,与面波探测的深度和水平距离进行换算,由于面波测点在地表不等距分布,因此里程也是不等间距分布,换算之后得到真实的高程与里程。

1.4 图像加工
为了得到比较美观的图像,在MATLAB中对图像进行加工。

2、数据读取与图像保存
2.1 读取面波视横波速度数据
选择数据文件夹。
% 读取面波数据
[FileName,PathName] = uigetfile('*.txt','请选择视横波速度文件',...'MultiSelect','on');
filename = strcat(PathName,FileName);
data = importdata(filename);
fprintf('\n读取视横波速度完成!\n请按任意键继续...\n');
提取数据,自编函数dealMBdata。
% 初始参数设置
% 最大深度
depth_max = 80;
% 插值点数
num_points = 40;% 面波数据预处理
[points,vs_value,xlocation] = dealMBdata(data);
2.2 数据与图像保存
% 保存数据
clear xx yy zz
xx = X1(:);
yy = Y1_new(:);
zz = YX(:);
C = [xx,yy,zz];
dlmwrite(strcat(PathName,'mianbo.dat'),C);
clear yy
yy = Y1_new(1,:);
high = [xa',yy'];
dlmwrite(strcat(PathName,'gaocheng.dat'),high);3、自编函数
3.1 dealMBdata函数
function [points,vs_value,xlocation] = dealMBdata(data)
% 此程序为整理面波数据,为克里金插值做准备;
% 输入为读取的面波数据;
% 输出为面波数据点坐标和视横波速度值。
data_sh = data.textdata;
k = strfind(data_sh,'Location:');
nlie = length(cell2mat(k));
data_sh_length = length(data_sh);% 数据解译,读出每个频散曲线的起点与长度
% 初始化矩阵
list_begin = ones(1,nlie);
xlocation = ones(1,nlie);
n = 1;
for i = 1:data_sh_lengthif k{i}begin = i+1;while k{begin}begin = begin+1;endlist_begin(n) = begin;xlocation(n) = str2double(data_sh{i,2});n = n+1;end
end% 创建克里金插值矩阵
points_length = data_sh_length - nlie - 1;
points = zeros(points_length,2);
vs_value = zeros(points_length,1);
nn = 1;
for i = 1:nlie-1A = data_sh(list_begin(i):...list_begin(i+1)-2,:);A = cellcell2mat(A);for j = 1:length(A)points(nn,1) = xlocation(i);points(nn,2) = A(j,1);vs_value(nn) = A(j,2);nn = nn + 1;end
end
clear A
A = data_sh(list_begin(nlie):...end,:);
A = cellcell2mat(A);
points(nn:end,1) = xlocation(nlie);
points(nn:end,2) = A(:,1);
vs_value(nn:end) = A(:,2);
3.2 cellcell2mat函数
function C = cellcell2mat(A)
% 此程序为将嵌套元胞数据转为矩阵
[row,col] = size(A);
C = ones(row,col);
for i = 1:colfor j = 1:rowa = cell2mat(A(j,i));b = str2double(a);C(j,i) = b;end
end
3.3 sInterp函数
function [xa,ya] = sInterp(xlocation,data_gc,interp_num,num_points)
a = polyfit(xlocation,data_gc,interp_num);
warning('off');
xa = linspace(min(xlocation),max(xlocation),num_points);
ya = polyval(a,xa);
3.4 sLcLabel函数
function data_lclabel = sLcLabel(data_lc)
n = length(data_lc);
data_lclab = num2str(data_lc);
data_lclabel = cell(n,1);
ak1 = data_lclab(1,:);
data_lclabel{1} = strcat(ak1(1:end-3),'+',ak1(end-2:end));
clear ak1 ak2
for i = 2:nak1 = data_lclab(i-1,:);ak2 = data_lclab(i,:);if strcmp(ak1(1:end-3),ak2(1:end-3))data_lclabel{i} = ak2(end-2:end);elsedata_lclabel{i} = strcat(ak2(1:end-3),...'+',ak2(end-2:end));end
end
4、完整代码
close all
clear
clc% 此程序功能是面波数据快速出图
% 作者:shangxiang
% 时间:2023年2月23日% 读取面波数据
[FileName,PathName] = uigetfile('*.txt','请选择视横波速度文件',...'MultiSelect','on');
filename = strcat(PathName,FileName);
data = importdata(filename);
fprintf('\n读取视横波速度完成!\n请按任意键继续...\n');% pause;
% 读取GPS测量高程数据
clear FileName PathName
[FileName,PathName] = uigetfile('*.txt','请选择GPS高程文件',...'MultiSelect','on');
filename_gc = strcat(PathName,FileName);
data_gc = load(filename_gc);
fprintf('\n读取高程数据完成!\n请按任意键继续...\n');% 读取GPS测量里程数据
clear FileName PathName
[FileName,PathName] = uigetfile('*.txt','请选择GPS里程文件',...'MultiSelect','on');
filename_lc = strcat(PathName,FileName);
data_lc = load(filename_lc);
fprintf('\n读取里程数据完成!\n');% 初始参数设置
% 最大深度
depth_max = 80;
% 插值点数
num_points = 40;% 面波数据预处理
[points,vs_value,xlocation] = dealMBdata(data);% 开始克里金插值
% 克里金插值预设参数
theta = [1 1];
lob = [0.1 0.1];
upb = [2 2];
[points_new,vs_value_new] = dsmerge(points,vs_value);
[dmodel,perf] = dacefit(points_new,vs_value_new,@regpoly0,...@correxp,theta,lob,upb);
% [dmodel,perf] = dacefit(points,vs_value,@regpoly0,@correxp,theta,lob,upb);
xmin = min(points(:,1));
xmax = max(points(:,1));
XX = gridsamp([xmin 0;xmax depth_max],num_points);
[YX,MSE] = predictor(XX,dmodel);
X1 = reshape(XX(:,1),num_points,num_points);
Y1 = reshape(XX(:,2),num_points,num_points);
YX = reshape(YX,size(X1));% 对地形数据进行插值,默认插值点数为9,可更改;
interp_num = 9;
[xa,ya] = sInterp(xlocation,data_gc,interp_num,num_points);
Y1_new = -Y1 + ya;% 对图形进行处理,补充图像下部
% ynew = max(Y1_new(end,:));
% Y1_new = Y1_new(Y1_new > ynew);
% X1 = X1(Y1_new > ynew);
% YX = YX(Y1_new > ynew);
% 处理里程数据
% 获取横坐标位置
data_lcx = data_lc - min(data_lc);
% 获取横坐标刻度
data_lclabel = sLcLabel(data_lc);% 画图
figure(1);
clear k
k = (depth_max+max(ya))/max(X1(1,:));
set(gcf,'position',[50 150 1200 1500*k]);
% pcolor(X1,Y1_new,YX);
contourf(X1,Y1_new,YX,50,'linecolor','none');
set(gca,'xtick',data_lcx,'xticklabel',...data_lclabel,'xticklabelrotation',45);
caxis([100 500]);
colormap(jet);
h = colorbar;
set(get(h,'title'),'string','\fontname{宋体}视横波速度(米/秒)',...'FontSize',10);
clear a b
axis equal;
box off;
% axis off
shading flat
set(gca,'fontname','times new roman','fontsize',...10,'fontweight','normal');
xlabel('\fontname{宋体}里程(m)');
ylabel('\fontname{宋体}高程(m)');% 保存数据
clear xx yy zz
xx = X1(:);
yy = Y1_new(:);
zz = YX(:);
C = [xx,yy,zz];
dlmwrite(strcat(PathName,'mianbo.dat'),C);
clear yy
yy = Y1_new(1,:);
high = [xa',yy'];
dlmwrite(strcat(PathName,'gaocheng.dat'),high);
代码运行过程中如果出现bug,请依据实际工程修改。
相关文章:
代码分享:面波数据快速成图
代码分享:面波数据快速成图 前言 目前,物探数据主要用surfer软件成图,surfer软件具有强大的插值和绘图功能,成图比较美观。但是,生产过程中大量的物探数据,依靠excel和surfer来成图耗费人力时间成本。本博…...
常见数据结构
一. 数据结构概述、栈、队列 1. 数据结构概述 2. 栈数据结构的执行特点 3. 常见数据结构之队列 二. 常见数据结构之数组 数组它就是内存中的一块儿连续区域。数组变量存的是数组在堆内存当中的起始地址。数组查询任意索引位置的值耗时相同,数组根据索引查询速度快。…...
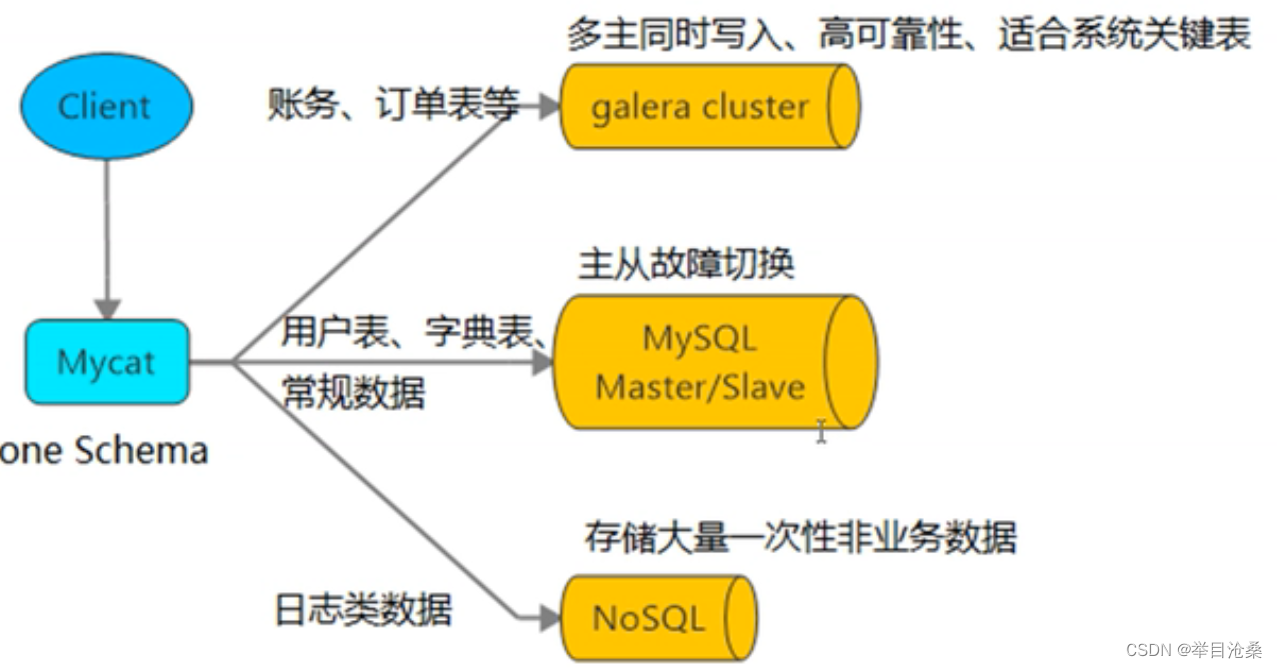
Mycat
Mycat 1.概述 1.Mycat是数据中间件2.中间件:连接软件组件和应用的计算机软件,便于软件和各部件的交互3.数据中间件:连接Java应用程序与数据库的软件2.适用场景 1.Java与数据库紧耦合(直接连接)2.高访问量高并发对数据库压力(集群)3.读写请求数据不一致(读写分离+主从复制)3.…...
Java 编写Vue组件(VueGWT的初尝试)
在之前,我曾写过这样的文章《不会前端没事,用GWT Boot和Spring Boot构建Web程序》,这篇文字使用的Domino UI来做前端页面,由于现在更流行VUE,并且VUE的页面更具现代化,所以我尝试了一下VueGWT。 VueGWT 有…...

【第二章 @RequestMapping注解(value,method,params属性),springMVC支持ant风格的路径,支持路径中的占位符】
第二章 RequestMapping注解(value,method,params属性),springMVC支持ant风格的路径,支持路径中的占位符 1. RequestMapping注解: (1) RequestMapping注解的作用就是将请…...
QML Text详解
1.简介 文本项可以显示普通文本和富文本。 2.示例 示例1:一个简单的text,可以设置字体颜色、大小等。 Window {visible: truewidth: 400height: 400title: qsTr("Hello World")Rectangle{width: 200height: 200border.width: 2Text {text: …...
xxl-job启用https访问
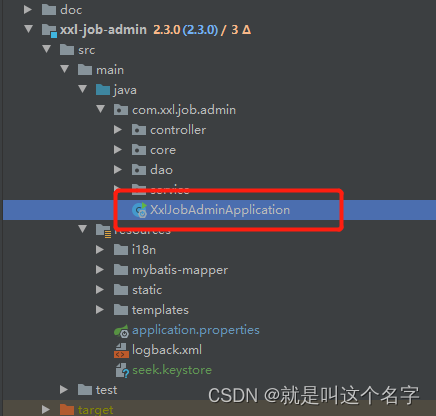
一、准备证书 1.进入想要生成证书的目录 2.在路径中输入cmd,点击回车 (1) (2) 3.输入命令keytool -genkeypair -alias "boot" -keyalg "RSA" -keystore "seek.keystore" 4.输入信息,…...

2023FL Studio最新中文版电子音乐、混音和母带制作DAW
水果具有独特的底层逻辑,其开创了编曲“块”的思维。用FL Studio编曲的流程是在把一个样式编辑好,然后将编辑好的样式当做音频块,在播放列表中像“搭积木”一样任意编排,形成一首歌,这种模式非常利于电子音乐编曲。 2…...
)
pytorch 35 yolov5_obb项目解读+使用技巧+调优经验(提升map)
yolov5_obb是一个用于旋转框预测的开源项目,项目地址为https://github.com/hukaixuan19970627/yolov5_obb。在使用yolov5_obb进行训练时,可能存在训练后精度不达标。使用yolov5_obb项目一定要对yolov5_obb的基本实现和关键部分要有所了解,同时对于使用过程中的参数设置,数据…...

OpenMv H7 口罩识别--毕业设计学习记录
刚开始都不知道自己的摄像头是OpenMv H7的还是OpenMv H7 Plus来的(白嫖实训室的,其实大概率猜到是H7来的,主要是不死心),后面问了一下ChatGPT。 总结大概就是: 1、都是STM32H743 主控,但是频率的MCU(480MHz…...
有什么比较好的bug管理工具?5款热门工具推荐
工具再优秀,适合自己才最重要。 为尽量讲透这个问题,本文的行文结构我先整理如下: 1、为什么需要bug管理工具? 2、好的bug管理工具的标准是什么? 3、好的bug管理工具推荐(5款) 4、如何挑选适合…...

第五章 opengl之摄像机
OpenGL摄像机摄像机/观察空间Look At矩阵自由移动移动速度视角移动欧拉角鼠标输入缩放补充:摄像机类摄像机 OpenGL本身没有摄像机(Camera)的概念,但我们可以通过把场景中的所有物体往相反方向移动的方式来模拟出摄像机,产生一种我们在移动的…...
—官方原版)
nginx配置详解(容器、负载)—官方原版
一、概述本指南对nginx进行了基本介绍,并描述了一些 可以用它完成的简单任务。 据推测,nginx已经安装在阅读器的机器上。 本指南描述了如何启动和停止nginx,并重新加载其 配置,解释结构 的配置文件,并描述了如何设置 n…...
2023年中职网络安全竞赛——CMS网站渗透解析
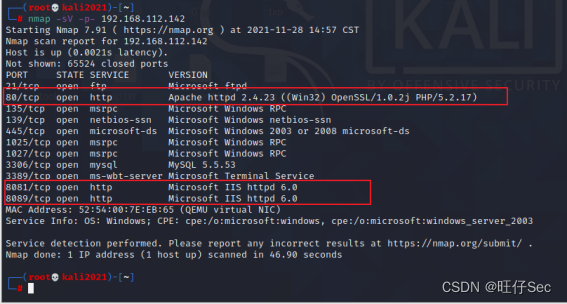
需求环境可私信博主 解析如下: CMS网站渗透 任务环境说明: 服务器场景:Server2206(关闭链接) 服务器场景操作系统:未知 1.使用渗透机对服务器信息收集,并将服务器中网站服务端口号作为flag提交; Flag:8089...
SQL 窗口函数详解
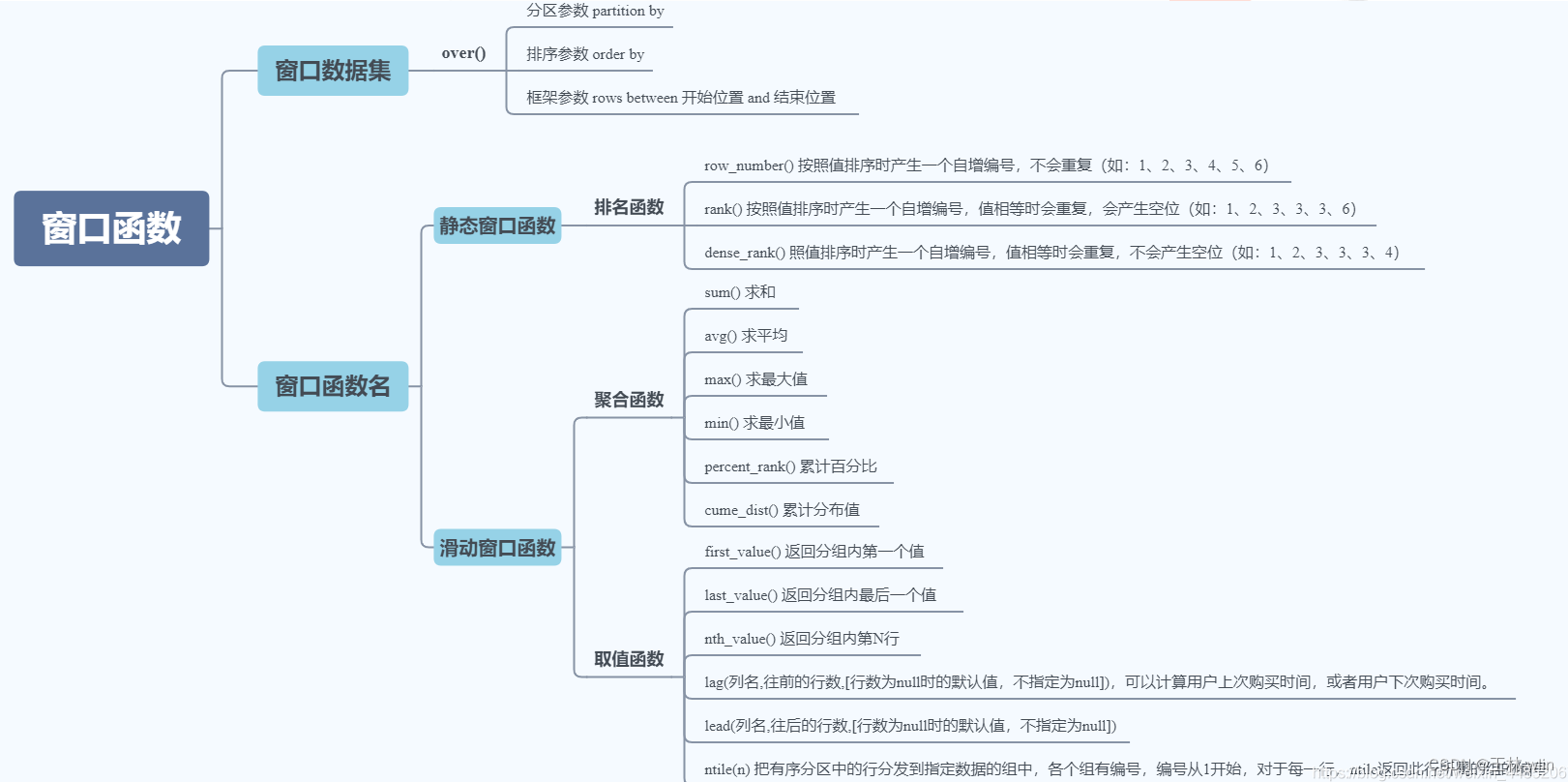
SQL窗口函数详解 窗口函数的主要作用是对数据进行分组排序、求和、求平均值、计数等。 一、窗口函数的基本语法 <分析函数> OVER ([PARTITION BY <列清单>] ORDER BY <排序用列清单> [ROWS BETWEEN 开始位置 AND 结束位置])理解窗口函数的基本语法ÿ…...
显示和隐藏最近任务)
Android 12系统源码_SystemUI(六)显示和隐藏最近任务
前言 Android12对最近任务做了调整,将原本处于SystemUI模块的最近任务转移到了Launcher3QuickStep应用中。 本篇文章我们会结合源码一起来梳理一下最近任务的显示流程。 一、SystemUI模块显示最近任务的相关代码 1、在SystemUI模块调用CommandQueue的showRecentA…...

Docekr三剑客之 Docekr compose
写在前面 Docker三剑客Docker Compose、Docker Machine、Docker Swarm分别是Docker官方开源的三个项目。有着不同的功能: Docker Compose负责实现对 Docker 容器集群的快速编排Docker Machine负责在多种平台上快速安装 Docker 环境Docker Swarm提供 Docker 容器集…...

企业是否具备等保测评资质在哪里查?怎么查?
为了规范等保相关业务办理流程,确保等保业务顺利办理,保障企业合法权益,政策规定,只有取得等保测评资质机构方可办理等保测评业务。因此很多人在问,企业是否具备等保测评资质在哪里查?怎么查? …...

Spacedesk软件推荐,让你的平板也变成电脑的副屏
我的设备: 电脑:戴尔G15 5511、i7-11800H、Windows 11、RTX3060 平板:荣耀V6、麒麟985、安卓10、分辨率2000*1200(手机也行,我用的平板) 实际使用: 先给放一张实际使用的照片 可以让平板变成电脑的副屏…...
Vue 3.0 组合式API 介绍 【Vue3 从零开始】
提示 在阅读文档之前,你应该已经熟悉了这两个 Vue 基础和创建组件。 在 Vue Mastery 上观看关于组合式 API 的免费视频。 通过创建 Vue 组件,我们可以将接口的可重复部分及其功能提取到可重用的代码段中。仅此一项就可以使我们的应用程序在可维护性和…...

CAJ转PDF神器:caj2pdf-qt让学术文献格式转换变得如此简单
CAJ转PDF神器:caj2pdf-qt让学术文献格式转换变得如此简单 【免费下载链接】caj2pdf-qt CAJ 转 PDF 转换器(GUI 版本) 项目地址: https://gitcode.com/gh_mirrors/ca/caj2pdf-qt 还在为CAJ格式的学术文献无法在手机、平板或其他设备上阅…...

3步解锁SWF逆向工程:JPEXS开源工具深度解析
3步解锁SWF逆向工程:JPEXS开源工具深度解析 【免费下载链接】jpexs-decompiler JPEXS Free Flash Decompiler 项目地址: https://gitcode.com/gh_mirrors/jp/jpexs-decompiler 你是否曾面对一个陈旧的SWF文件束手无策?当Flash技术逐渐退出历史舞台…...

5分钟搞定Windows和Office激活:KMS_VL_ALL_AIO智能激活完全指南
5分钟搞定Windows和Office激活:KMS_VL_ALL_AIO智能激活完全指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows系统激活而烦恼吗?每次重装系统后都要面对繁…...

AI智能体技能栈构建:基于Claw与Hermes框架的模块化实践
1. 项目概述:构建我的AI智能体技能栈最近在折腾AI智能体(Agent)的开发,特别是围绕Claw和Hermes这两个框架。如果你也对这个领域感兴趣,想打造一个能处理复杂任务、拥有多种技能的智能助手,那么我整理的这个…...
)
CCS6.0新建DSP28069工程后,必做的5项TI官方库配置(解决编译错误与链接问题)
CCS6.0新建DSP28069工程后必做的5项TI官方库配置实战指南 当你用CCS6.0为DSP28069新建一个空工程并点击"Finish"后,真正的挑战才刚刚开始。那些看似简单的编译错误和链接问题背后,隐藏着TI官方库配置的关键逻辑。本文将带你深入理解每个配置步…...

ServerPackCreator终极指南:3分钟自动化创建Minecraft服务器包 [特殊字符]
ServerPackCreator终极指南:3分钟自动化创建Minecraft服务器包 🚀 【免费下载链接】ServerPackCreator Create a server pack from a Minecraft Forge, NeoForge, Fabric, LegacyFabric or Quilt modpack! 项目地址: https://gitcode.com/gh_mirrors/s…...

【DeepSeek安全防护权威指南】:20年攻防专家亲授Prompt注入3大高危场景与7层防御体系
更多请点击: https://intelliparadigm.com 第一章:DeepSeek Prompt注入防护的演进与现状 随着 DeepSeek 系列大模型在企业级场景中的深度部署,Prompt 注入攻击已从理论威胁演变为高频真实风险。早期防护策略依赖于简单的关键词过滤和长度截断…...
)
Windows 10下保姆级教程:Quartus Prime 18.0 + ModelSim SE 安装与破解全流程(含USB-Blaster驱动)
Windows 10下Quartus Prime 18.0与ModelSim SE完整安装指南 第一次接触FPGA开发的朋友们,面对Quartus Prime和ModelSim的安装过程可能会感到无从下手。这份指南将带你一步步完成从软件下载到最终验证的全过程,确保你的开发环境搭建顺利。不同于网络上零散…...

终极指南:如何快速筛选高质量免费股票资源的5大核心标准
终极指南:如何快速筛选高质量免费股票资源的5大核心标准 【免费下载链接】awesome-stock-resources :city_sunrise: A collection of links for free stock photography, video and Illustration websites 项目地址: https://gitcode.com/gh_mirrors/aw/awesome-s…...

如何在PC上快速配置yuzu模拟器:完整游戏体验指南
如何在PC上快速配置yuzu模拟器:完整游戏体验指南 【免费下载链接】yuzu 任天堂 Switch 模拟器 项目地址: https://gitcode.com/GitHub_Trending/yu/yuzu 想在电脑上畅玩任天堂Switch游戏吗?yuzu模拟器是你的最佳选择!作为目前最成熟的…...