【无人机综合考试题】
1.请选择出哪一个功能选项,在手动遥控飞行时,可以改变各通道的操作灵敏度?
行程比例在手动遥控飞行时,可以改变各通道的操作灵敏度
- 用于起降的遥控器中 THR、ELE 通道分别控制多旋翼无人机的什么运动?
AIL(左、右移动)RUD(左、右水平旋转)THR(上升、下降)ELE(前后、俯仰)
- 用于起降的遥控器菜单中 FAILSAFE 是什么功能设定?[1分][1分]
System 模式转换;ModelSelect 模型选择;:FAILSAFE 失控保护
- 遥控器 SUBTRIM 代表什么意思?中立微调
END POINT 舵量微调;THR CURVE 油门微调
5.聚合物锂电池长时间储存单片电压是多少?3.8v
4.2v是满电电压;3.7v是标准(标称)电压
6.以 6S5000mAh20C锂电池为例,最大放电电流是多少?
最大放电电流(A)等于额定容量(mAh)除以1000再乘以倍率C。5000/1000*20=100A
7.下列哪种电池的能量密度最大?
锂聚合物电池大于镍氢电池大于铅酸电池
8.现有两组10000mah/6s/15c的电池,将两组电池并联使用1C充电,充满电后电池组的电压是多少?
满电电压=电池数量*4.2。两组电池并联不改变电压,即6*4.2=25.2v
9.6S2P/10000mah/20C 电池,当两块电池并联,最大放电电流多少安?
最大放电电流(A)等于额定容量(mAh)除以1000再乘以倍率C。10000/1000*20*2=400A
10.10000mah/6S/15C 的电池充电,设置安全电流多少安?
安全电流不应该超过电池额定容量。本题电池额定容量10000mah=10A
11.成品 Lipo6S1P12000mah30C 电池,请问该电池的单片电芯容量为多少 mah?
串联电池不改变电池的容量,只改变电池的电压。12000mah
12.成品 Lipo6S1P10000mah3C电池,请问该电池可设定的最大充电电流 为多少
最大放电电流(A)等于额定容量(mAh)除以1000再乘以倍率C。10000/1000*3=30A
13.成品 Upo6S1P12000mah30C 电池,请问该电池的单片电芯容量为多少 mah?该组电池电压在几 V 的状态下可长时间保存?12000mah22.8V-23.4V
串联电池不改变电池的容量,只改变电池的电压。6*3.8(3.9)V=22.8(23.4)V
14.下列无人机部件中,电调杜邦线接什么?
电调上的杜邦线可连接飞控和接收机,但在有飞控的前提下连接飞控。
15.标有 60A 的电调中,选用多大的电池合适?大于 60A
因为电池要给电调供电,所以安时必须大于电调
16.电调的作用不包括哪些?改变电流大小
电调的作用:1.改变电机转速;2.直流电变交流电;3.电机换向;4.反馈信号;5.BEC输出;6.稳压;7.过热保护。
- 常用电调线的数量不包括? 6根
电调正常7-8根线,电池2+电机(有刷电调2根无刷电调3根)+接收机/飞控3
- 电调最粗的两根硅胶线连接什么?电池
同色粗线连电机;杜邦线连飞控
标有 4S-6S 的电调,最大允许多大电压?6*4.2=25.2v
19.无人机 ESC 部件(标称:输入电压为12.6-25.2、持续电流为 120A),以下两组电 6S10000mah10C 和12S16000mah15C,哪一组适用6S 10000mah 10C
20.目前常用无人机使用什么类型的电机
目前常用无人机使用外转子三相交流无刷同步电机
- 保持油门持续爬升,电机功率会增加还是减小
保持油门持续爬升,电机功率不变,变的是电机转速
22.外转子电机和内转子电机,在相同电压,相同电流下那个转速高?内转子电机
在转子重量相同情况下,内部转的没有外面转的转动惯量大,所以里面转的kv高力矩低,外面转的刚好相反。
23.一般情况下,无人机使用的电机 5022、4025 哪个电机的 KV 值大些?
KV值高的,线圈匝数较多,但上面缠的漆包线就较细,定子线圈直径就较小;KV值低的,线圈匝数较少,但上面缠的漆包线就较粗,定子线圈直径就较大。40小于50,所以4025电机KV值大
24.汽油机随着高度的增加,功率会增加还是减小
越高处空气越稀薄
25.有这么三种规格的电机,3s30000mah400KV(1)4s20000mah600KV(2),6s10000mah800KV(3),请问哪个电机的转速最高(不带桨)
KV值表示转速,800大于600大于400
26.CW1545 螺旋桨与 CCW14X6 螺旋桨,请问哪支螺旋桨螺距大
CW奖螺距4.5英寸;CCW奖螺距6英寸
26.所使用的多旋翼无人机,其所使用的是定距螺旋桨还是变距螺旋桨
27.请选择出以下哪一只螺旋桨升力最大?旋翼面积最大,18x7(两叶螺旋桨)
28.多旋翼飞机如何实现左转弯,螺旋桨转速如何变化
顺时针右转,逆时针左转,因空气的反作用的要使飞机实现左转弯,所以(顶视)顺时针加速、逆时针减速
29.能否使用高 KV 的电机带动远大于适配桨大小的桨?不能
高KV 的电机带大奖,扭矩不够,转不动或者转不快,电机和电调很容易烧掉
- 高海波地区选用什么样的桨叶效率最高?高海拔地区选用两叶浆重平稳效率重高
- 现有螺旋桨 1845、1555 和电机5035、4012 请写出最优化的组合方式?1845和5035;1555和4012匹配原则:直径大的带大桨,直径小的带小桨
- 电台、接收机、调速器、电池、GPS.35.电机(多旋翼无人机以下哪个组设备连接是正确的)?电池-调速器-电机
- 请将多旋翼无人机以下部件正确用线连接:IMU、ESC、起落架、电机、螺旋桨。无人机动力系统的部件连接:ESC-电机-螺旋桨,其余不连。
- 请将固定翼无人机以下部件正确用线连接:发动机.IMU、起落架、螺旋奖、水平尾翼,
固定翼无人机正确的动力系统部件连接:发动机一螺旋桨
- 自动驾驶仪中的陀螺是用来测量哪些物理量的?自动驾驶仪中的陀螺仪测量角速度或是姿态角
- 飞控上的 GPS/COMPSS 模块不能给无人机提供哪些数据?GPS可以给无人机提供位置、方向、高度、速度,不能提供加速度
- 每到一个新地方必须校准什么传感器?每个地方地磁场不同,地磁传感器
- 地面站链路属于什么链路?地面站上行链路传送指令给飞行器;飞行器下行反馈信息给地面站。故地面站链路属于上下行链路。
- 地面站中无线电波长越长,绕射能力越?(??地面站中无线电波长越长,绕射能力越强;地面站中无线电波长越短,绕射能力越弱,地面站中无线电频率越小,穿透能力越弱
- 定向型天线的优点?定向型天线的优点:增强信号强度增加抗干扰能力,即辐射距离远
- 下列属于定向天线的是?八木
- 各长度鞭状天线架设方式必须和通讯方?垂直
- 飞行中地面站显示滚转角度为零,目视47.飞机有明显的坡度,不太可能原因是什么?上行链路中断
- 在自主飞行过程中,遥控器油门的位置应处于中间略上
在自主飞行过程中,遥控器油门的位置应处于中间略上。这样在切换为舵面操纵的时候才不会突然升高或突然降低。
- 以下哪种多旋翼机架是"H”型?(“悟”
- 多旋翼飞行器为什么一般相对的桨旋转方向是不一样的(??抵消反扭矩,多旋翼为了抵消单个螺旋桨的反扭矩,相对的桨旋转方向不一样。
- 多旋翼有几个自由度?滚转运动是绕哪个轴转?6个,纵轴,6个自由度分别是上下、左右、前后平移;俯仰(横轴)、滚转(纵轴)、偏航(立轴)运动。
- 多轴飞行器飞行平台 哪些设备组成?飞控、电调、电机、螺旋桨、机架、接收机
- 多旋翼飞行器上各种天线设备布置有什么要求?(??数传天线布置于机腹
- 电动多旋翼的螺旋桨可以做的尽量大从而可以用最少的旋翼数实现大载荷是否正确?不一定,多旋翼桨若与电机不匹配,桨叶尺寸过大,电机会带不动桨或损坏
- 多旋翼拥有三轴布局的形式,这种布局形式中间轴多了一个舵机,这个舵机的作用是什么?抵消反扭矩,三轴布局式多旋翼优点在于使用的动力组较少有成本优势,但是尾旋翼上需要使用一个舵机用于平衡扭矩。
- 多旋翼无人机自动驾驶状态下,安全下降速率应该是哪一个?(多旋翼无人机以5m/s上升,2m/s下降较为合理
- 旋翼飞行器从悬停到高速前飞的增速过程中,需用功率是如何变化的?起飞到悬停功率增大后减小,悬停到高速前飞功率减小后增大
- 倾斜盘是 CCPM 的直升机,当飞机往后飞时,多少个舵机在动??3个
- 常规布局直升机尾桨的主要作用不包括?减少噪声,直升机尾桨作用:1、抵消反扭矩 2、改变航向3、为飞机提供部分升力
- 共轴式直升机是通过改变什么来改变航向?上下旋翼桨距
- 典型的无人直升机由哪几部分组成?旋翼系统,传动系统,发动机,尾奖系统
- 直升机的重心位置处于机体的哪个部位?直升机的主轴前处
- 直升机旋翼头有几种结构形式?铰接式旋翼星形柔性桨毂旋翼,无铰式旋翼万向接头式旋翼
- 以下不属于直升机的是(?倾转旋翼机,四旋翼飞行器是多轴飞行器是特殊的直升机
- 单旋翼带尾桨直升机典型尾桨构造?无轴承”式,多叶铰接式多叶万向接头式
- 一般情况下,要增加直升机最大负载,最合适的办法是(??增加转速,减小桨距
- 现在常见的直升机中,平衡周期变距克服挥舞的部件是(?电子陀螺仪
- 倾斜盘是CCPM 的直升机有几个舵机,4个
- 多旋翼无人机在使用地面站超视距飞行69.中,数传下行链路故障中断,该如何处理?暂停飞行、尝试重新连接、点击一键返航
- 无人直升机遥控状态下动力失效最恰当的处理?(??)[势能换动能,打负总距,使旋翼高速下降,在离地面数米高度时,将总距变最大,迅速制 止快速下沉,缓慢着陆。
- 直升机飞行过程中,若尾旋翼失效,飞机将(??若主旋翼顺时针旋转,此时尾旋翼失效,飞机向逆时针自旋
- 多旋翼无人机在使用地面站超视距飞行中,数传上行链路故障中断,该如何处理?使用地面站超视距飞行中,数传上行链路故障中断,驾驶员应检查上行链路设备恢复通信
- 多旋翼遥控状态下动力失效最合适处理方法?有伞开伞,多旋翼遥控状态下动力失效时,驾驶员应在人员安全的前提下尽量保护飞机的完整性
- 使用遥控器遥控飞行时,如果无人机反应时断时续或无反应,不可能的原因是动力电池电量不够无人机会直接停止工作
- 执行飞行任务前,对无人机的检查准备75.工作包括哪些?①检查电池电量;②飞行器外观检查,各机载设备零部件外观及连接螺旋桨是否安装正确;③检查遥控器与地面站遥控器各开关位置是否正确,遥杆位置是够正确,地面站电量是否充足,软件是否完备,地面设备连接是否可靠。4开机顺序是否正确:控制站-遥控器-无人机⑤遥控器开机,所选 模型是否正确,飞行模式是否正确(??)1234
- 飞行器检查时,多旋翼电机产生震动,76.在排除电机本身故障后,检查动力电路。我们应检查电调的输入端连接还是输出端连接?输出端
- 多旋翼飞行器如果重新组装后,不需要校准哪些传感器?气压计,(GPS和磁罗盘在重新组装后必须校准,若为校准可能会导致数据异常而无法正常工作。经常校准可使GPS和磁罗盘工作在最佳状态。
- 无人机在飞行中晃动过大或反应滞后78.除了飞控感度的原因,还有可能是什么原因? ①多旋翼飞行器机臂刚度不够,或有安装旷量②多旋翼机体太大致使转动惯量太大③多旋翼 螺旋桨太重,加减速慢致使操纵相应慢固定翼机体或舵面刚度不够,连杆、摇臂或舵机本 身有旷量。(??1234
- 自动定高飞行时,飞行器持续升高或下降,不可能的原因是什么?(?角速度计故障,角速度计是测量飞机角速度的
- 关于无人机 GPS 天线与遥控接收机天线的说法正确的是?(GPS 天线一般为定向天线,位于机体上方。地面遥控发射机遥控信号,GPS 卫星位置信号
- 民用无人机调整中的基本感度是?飞控 PID 调节中的比例 P 的系数,PID:Proportion Integration Differentiation 比例-积分-微分控制器 P:比例 飞控修正补偿的频率(多大角度飞控开始修正)1:积分飞控修正补偿的强度(决定飞控修正的快慢)D:微分 飞控修正补偿的幅度(飞控修正角度的大小
- 对于直升机、多旋翼无人机的旋翼或固定翼无人机的螺旋桨,保持角速度一定,更换直径较小的螺旋桨(?桨间线速度减小,线速度=角速度*半径,直径减小则桨间线速度减小
- 遥控器、图传、地面站与飞行器之间数据链路分别是?上行链路、下行链路、上下行链路并存,遥控器上行链路、图传下行链路、地面站与飞行器上下行链路并存(地面站指令控制飞行器,飞行器反馈信息给地面站)
- 遥控器菜单中 SUBTRIM 代表什么意思?中立微调
- 众所周知,物体运动的速度是一个矢85.量,关于飞行过程中空速与地速的关系,下列正确的是?(??地速:飞机飞行时相对地面的速度 空速:飞行器相对于空气的速度 无论何时,空速+风速=地速
- 已知某锂电池铭牌标记为 2S2P3C,单片锂电池容量为 16000mah,则该电池的最大放电电流是多少?(??最大放电电流(A)等于额定容量(mAh)除以1000再乘以倍率C。16000/1000*3*2=96A
- 螺旋桨参数为 1045CCW 其含义是什么?桨叶直径 10in,螺距 4.5in,逆时针旋转的螺旋桨,CCW属于正奖,正桨逆时针旋转。1045奖的单位是英寸。
- 无人机在姿态模式下(??)飞控参与内回路,姿态模式--内回路;位置(GPS)模式--内外回路
- 无人机在 GPS 模式下人工管什么?位置修正量
- 关于失速,下面那个说法是正确的,失速会导致升力系数急剧减少,阻力系数迅速增大。机翼迎角超过临界迎角,导致升力急剧降低的飞行状态称为失速。直升机前飞速度过快,可能导致后行旋翼出现失速
- 若一架无人机在飞行中可以进行舵面遥91.控,但无实时图像信号,地面站有各类仪表信息,但无法编辑航点航线,请问该无人机的遥控器(??)正常,图传()故障,数传电台()正常,()故障:?上行链路,下行链路,下行链路,上行链路。可以进行舵面遥控说明遥控器上行链路正常,无实时图像信号说明图传下行链路故障,有各类仪表信息说明数传电台下行链路正常,无法编辑航点航线说明数传电台上行链路故障
- 无刷电机如果遇到旋转方向相反,需要换向时应如何处理:(?电调与电机的连线进3根中任意对换2根,可使电机旋转方向转向。同时在电调中也可以设置电机的旋转方向
- 以下无人机相关部件,数传电台、飞控、电子调速器、OSD、5.8G图传、电机、摄像头等,连接方式正确的是:(?电机--电子调速器--飞控--数传电台
- 遥控器中升降舵、副翼、方向舵、油门控制通道的英文简称分别正确的是:降舵、副翼、方向舵、油门 ELE AIL RUD THR
- 设计多旋翼、选配件的一般思路是:(?选布局-选桨-选电机-选电调-选电池
- “1555”的桨,代表的意义?“15”代表桨的长度为15mm,“55"代表奖的螺距为55mm,桨的单位是英寸in
- 在没有遮挡的山地、水面、沙漠,那个对遥控的距离影响最大??(水面,因为飞机在一大片水体上飞行会产生下沉效应
相关文章:

【无人机综合考试题】
1.请选择出哪一个功能选项,在手动遥控飞行时,可以改变各通道的操作灵敏度? 行程比例在手动遥控飞行时,可以改变各通道的操作灵敏度 用于起降的遥控器中 THR、ELE 通道分别控制多旋翼无人机的什么运动? AIL(左、右移动)RUD(左、右水平旋转…...
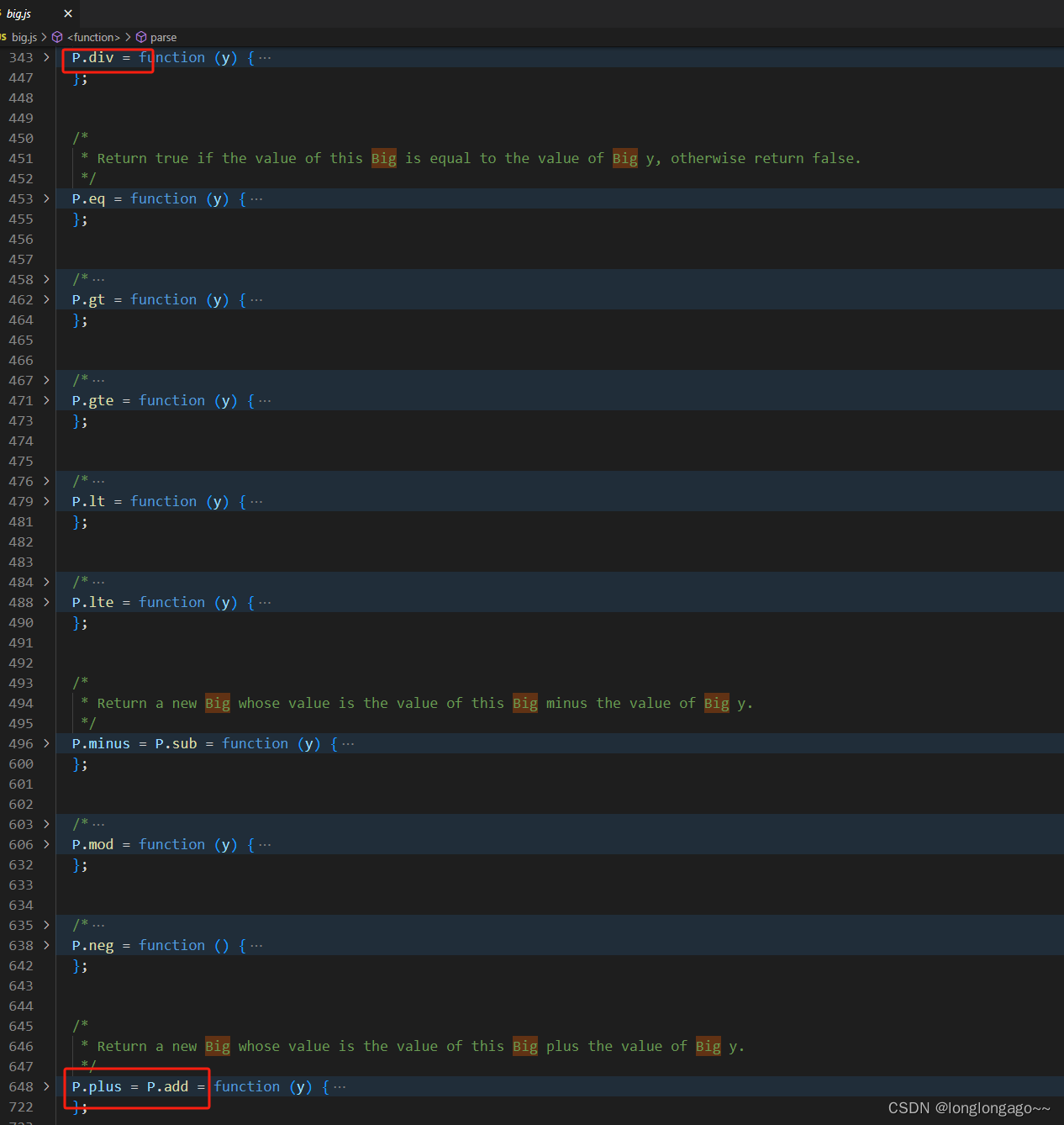
JS精度计算的几种解决方法,1、转换成整数计算后再转换成小数,2、toFixed,3、math.js,4、bignumber.js,5、big.js
提示:学习express,搭建管理系统 文章目录 前言一、转换成整数计算后再转换成小数二、toFixed三、math.js四、bignumber.js五、big.js总结 前言 原始计算 let aNum 6.6 0.3;let bNum 6.6 - 0.2;let cNum 6.6 * 0.3;let dNum 6.6 / 0.2;console.log(…...
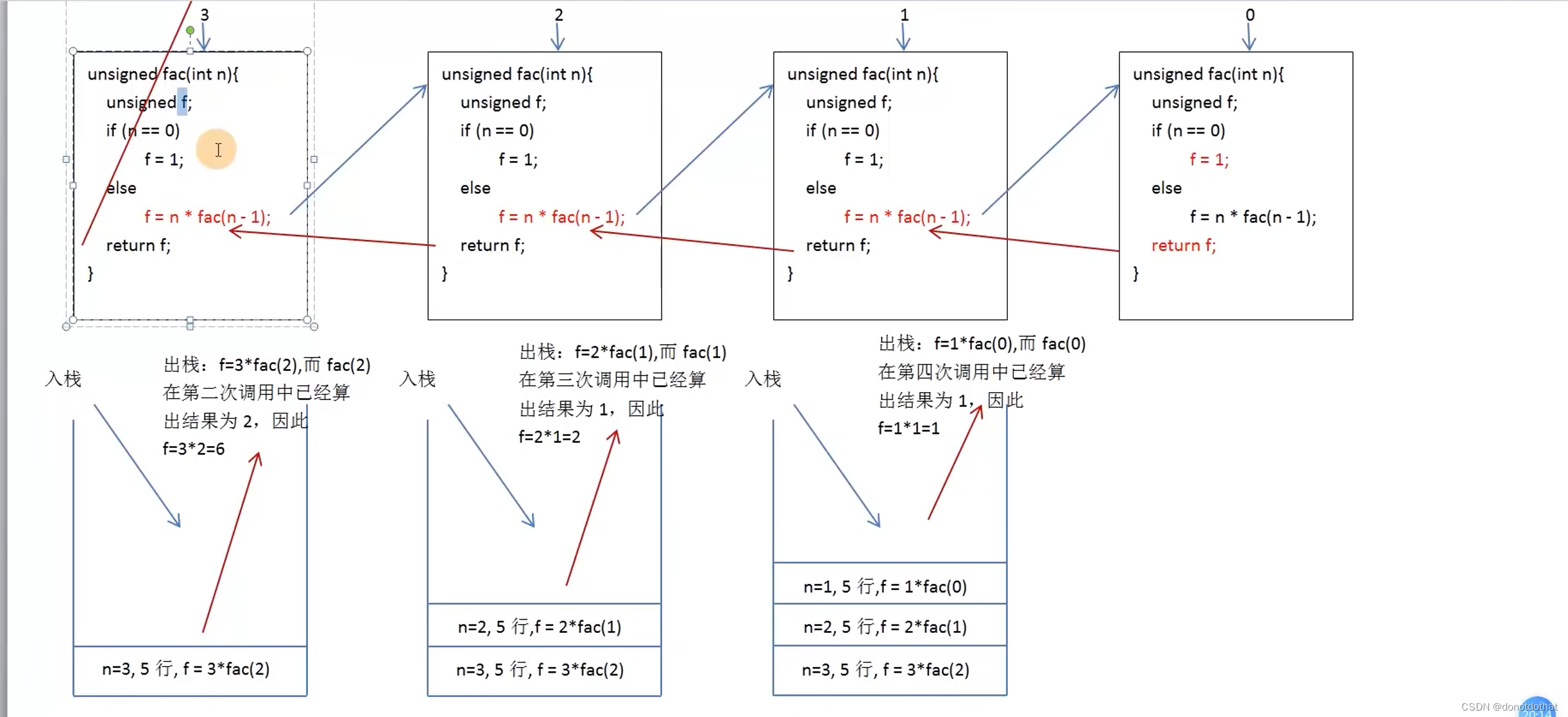
v77.递归
理解: 函数直接或者间接地调用自身;并且有边界条件。 1: #include <stdio.h> int main() {int result fun(3);printf("%d",result);return 0 ; } int fun(int num) {if(num 1)return num;return num fun(num-1); }思路…...

Spring Cloud微服务功能及其组件详细讲解
Spring Cloud微服务功能及其组件详细讲解 文章目录 Spring Cloud微服务功能及其组件详细讲解前言:什么是微服务?一、Spring Cloud原理简述二、核心组件1、服务发现——Nacos/Eureka/Consul1)Nacos服务发现2)Eureka服务发现3&#…...
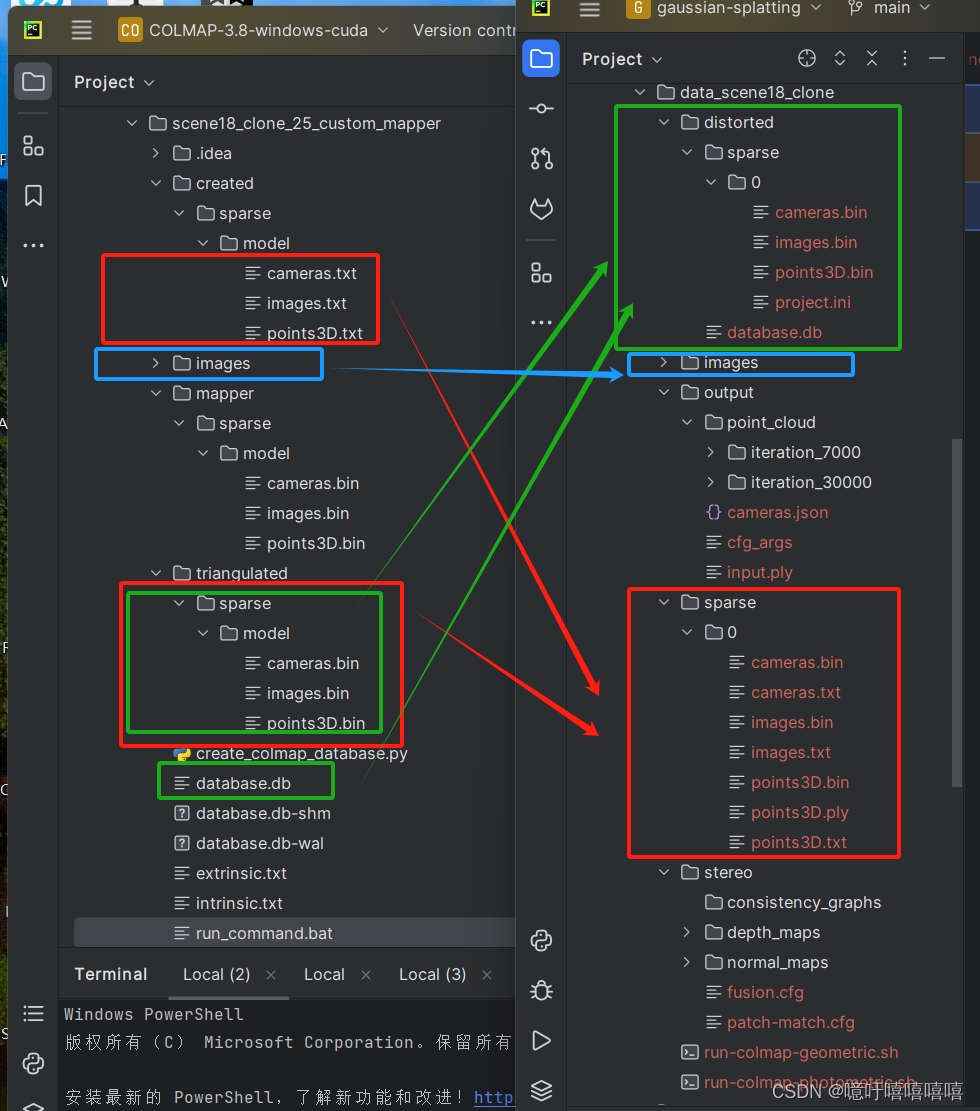
(三维重建学习)已有位姿放入colmap和3D Gaussian Splatting训练
这里写目录标题 一、colmap解算数据放入高斯1. 将稀疏重建的文件放入高斯2. 将稠密重建的文件放入高斯 二、vkitti数据放入高斯 一、colmap解算数据放入高斯 运行Colmap.bat文件之后,进行稀疏重建和稠密重建之后可以得到如下文件结构。 1. 将稀疏重建的文件放入高…...

4635: 【搜索】【广度优先】回家
题目描述 小 H 在一个划分成了nm 个方格的长方形封锁线上。 每次他能向上下左右四个方向移动一格(当然小 H 不可以静止不动), 但不能离开封锁线,否则就被打死了。 刚开始时他有满血 6 点,每移动一格他要消耗 1 点血量…...

Uibot6.0 (RPA财务机器人师资培训第1天 )RPA+AI、RPA基础语法
训练网站:泓江科技 (lessonplan.cn)https://laiye.lessonplan.cn/list/ec0f5080-e1de-11ee-a1d8-3f479df4d981(本博客中会有部分课程ppt截屏,如有侵权请及请及时与小北我取得联系~) 紧接着小北之前的几篇博客,友友们我们即将开展新课的学习~…...
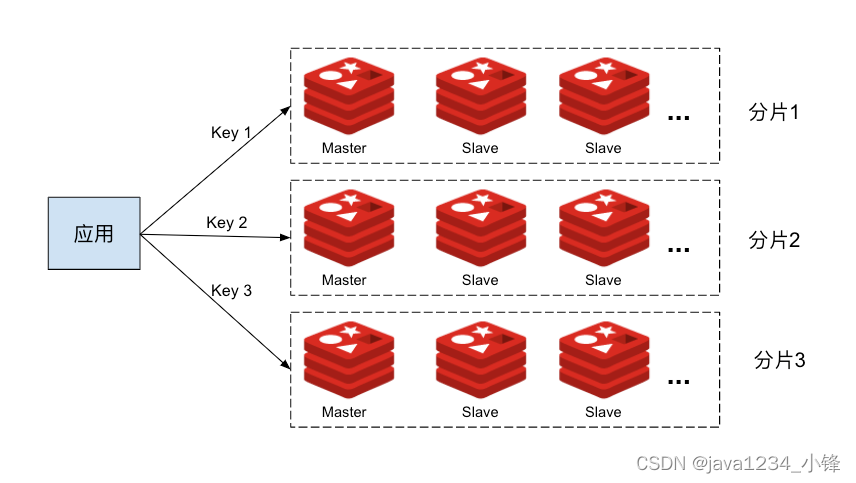
【吊打面试官系列】Redis篇 -Redis集群的主从复制模型是怎样的?
大家好,我是锋哥。今天分享关于 【Redis集群的主从复制模型是怎样的?】 面试题,希望对大家有帮助; Redis集群的主从复制模型是怎样的? 为了使在部分节点失败或者大部分节点无法通信的情况下集群仍然可用,所…...

高效的二进制列化格式 MessagePack 详解
目录 MessagePack 序列化原理 MessagePack 数据类型及编码方式 MessagePack 序列化与反序列化过程 MessagePack 的优势 应用场景 注意事项 小结 MessagePack (简称 msgPack)是一种高效的二进制序列化格式,可以将各种数据类型ÿ…...

鸿蒙Harmony应用开发—ArkTS-if/else:条件渲染
ArkTS提供了渲染控制的能力。条件渲染可根据应用的不同状态,使用if、else和else if渲染对应状态下的UI内容。 说明: 从API version 9开始,该接口支持在ArkTS卡片中使用。 使用规则 支持if、else和else if语句。 if、else if后跟随的条件语句…...
)
JAVA 100道题(14)
14.使用LinkedList实现一个简单的堆栈(Stack)数据结构。 下面是一个简单的Java程序,使用LinkedList来实现一个堆栈(Stack)数据结构。在这个程序中,我们定义了一个MyStack类,它包含了一些基本的堆…...
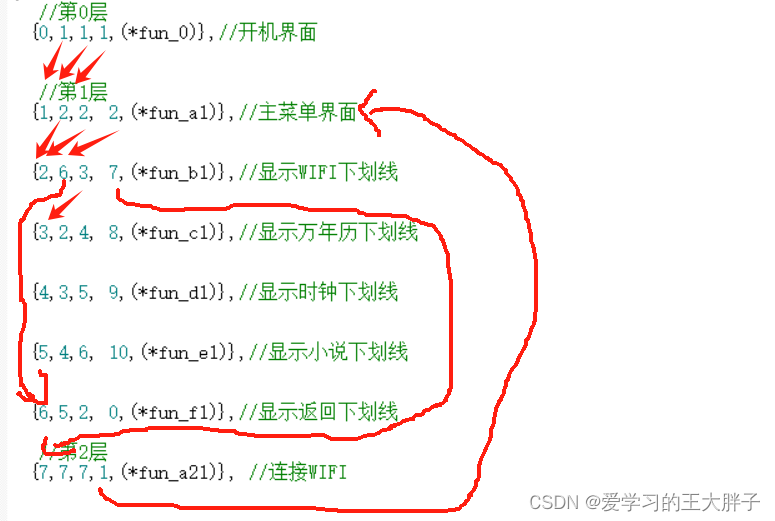
STM32+ESP8266水墨屏天气时钟:简易多级菜单(数组查表法)
项目背景 本次的水墨屏幕项目需要做一个多级菜单的显示,所以写出来一起学习,本篇文章不单单适合于水墨屏,像0.96OLED屏幕也适用,区别就是修改显示函数。 设计思路 多级菜单的实现,一般有两种实现的方法 1.通过双向…...
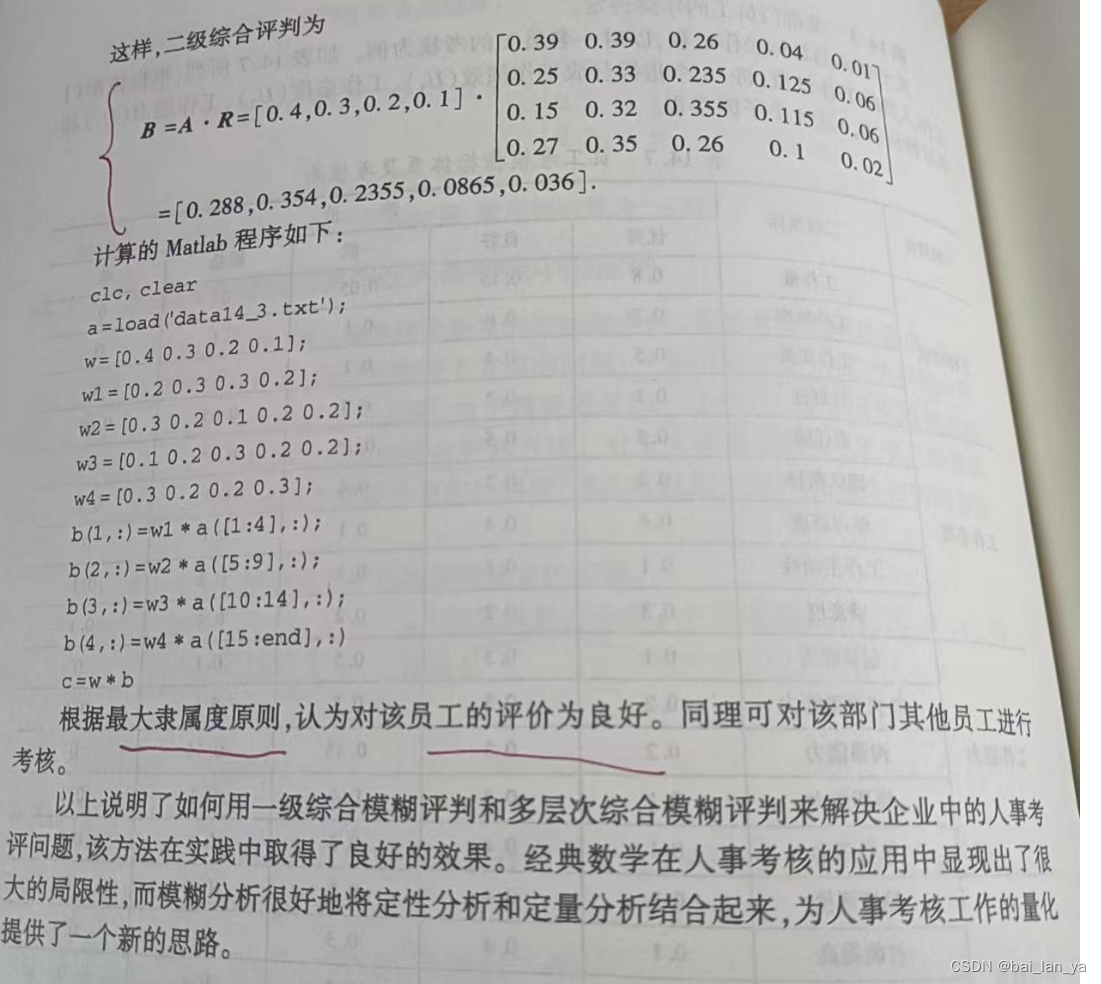
数学建模综合评价模型与决策方法
评价方法主要分为两类,其主要区别在确定权重的方法上 一类是主观赋权法,多次采取综合资讯评分确定权重,如综合指数法,模糊综合评判法,层次评判法,功效系数法等 另一类是客观赋权法,根据各指标…...
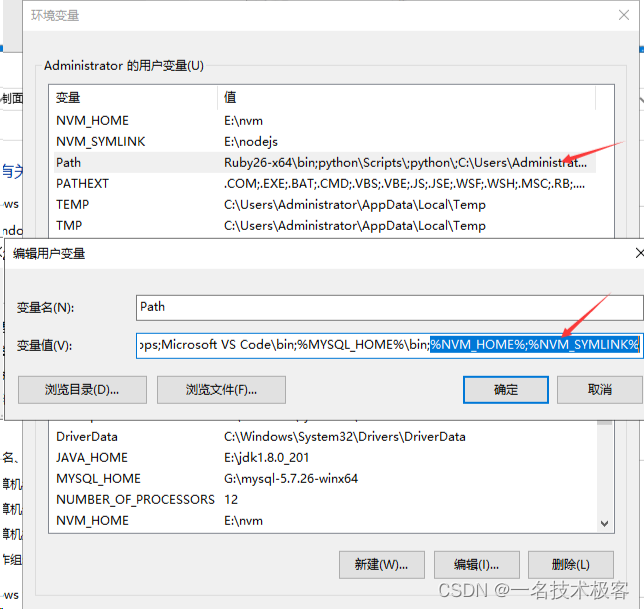
window下安装并使用nvm(含卸载node、卸载nvm、全局安装npm)
window下安装并使用nvm(含卸载node、卸载nvm、全局安装npm) 一、卸载node二、安装nvm三、配置路径和下载源四、使用nvm安装node五、nvm常用命令六、卸载nvm七、全局安装npm、cnpm八、遇到的问题 nvm 全名 node.js version management,顾名思义…...
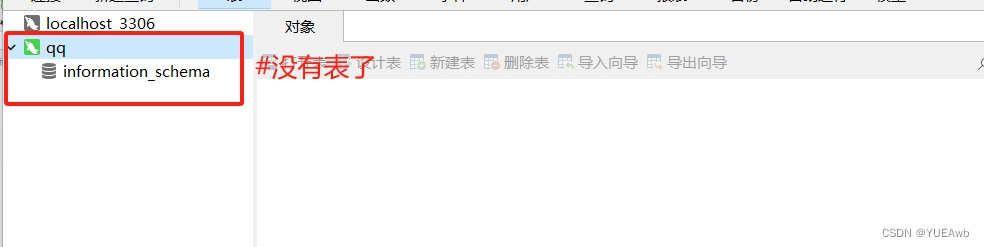
Mysql——基础命令集合
目录 前期准备 先登录数据库 一、管理数据库 1.数据表结构解析 2.常用数据类型 3.适用所有类型的修饰符 4.使用数值型的修饰符 二、SQL语句 1.SQL语言分类 三、Mysql——Create,Show,Describe,Drop 1.创建数据库 2.查看数据库 3.切换数据库 4.创建数据表 5.查看…...

记录一次流相关故障
记录一次流相关故障 1、项目中有个JSON字典文件,通过流的方式加载进来,写了个输入流转字符串的方法,idea开发环境下运行一切正常,打成jar或者war包运行时,只能加载出部分数据,一开始怀疑过运行内存分配过小…...

linux源配置:ubuntu、centos;lspci与lsmod命令区别
1、ubuntu源配置 1)先查电脑版本型号: lsb_release -c2)再编辑源更新,源要与上面型号对应 参考:https://midoq.github.io/2022/05/30/Ubuntu20-04%E6%9B%B4%E6%8D%A2%E5%9B%BD%E5%86%85%E9%95%9C%E5%83%8F%E6%BA%90/ /etc/apt/…...
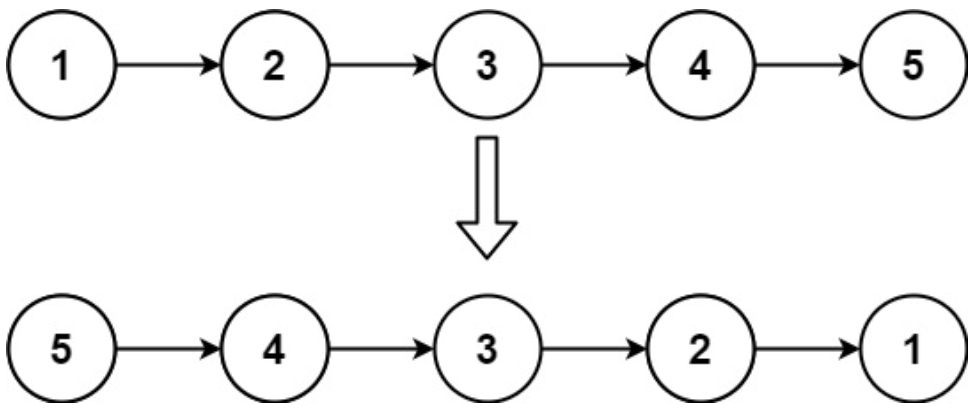
面试算法-88-反转链表
题目 给你单链表的头节点 head ,请你反转链表,并返回反转后的链表。 示例 1: 输入:head [1,2,3,4,5] 输出:[5,4,3,2,1] 解 class Solution {public ListNode reverseList(ListNode head) {if(head null || hea…...
如何在个人Windows电脑搭建Cloudreve云盘并实现无公网IP远程访问
文章目录 1、前言2、本地网站搭建2.1 环境使用2.2 支持组件选择2.3 网页安装2.4 测试和使用2.5 问题解决 3、本地网页发布3.1 cpolar云端设置3.2 cpolar本地设置 4、公网访问测试5、结语 1、前言 自云存储概念兴起已经有段时间了,各互联网大厂也纷纷加入战局&#…...

一文详解Rust中的字符串
有人可能会说,字符串这么简单还用介绍?但是很多人学习rust受到的第一个暴击就来自这浓眉大眼、看似毫无难度的字符串。 请看下面的例子。 fn main() {let my_name "World!";greet(my_name); }fn greet(name: String) {println!("Hello…...

AI大模型应用开发全攻略:从入门到精通,掌握LLM、RAG、Agent核心技能!“
本文全面介绍了AI大模型应用开发的核心技术和实践。从大模型API交互基础,到关键参数Messages和Tools的作用,深入解析了RAG、ReAct、Agent等应用范式。文章还探讨了Fine-tuning微调和Prompt提示词工程的重要性,强调工程实践与业务需求相结合。…...

告别C盘战士!ArcGIS 10.6安装路径选择与磁盘空间优化全攻略
告别C盘战士!ArcGIS 10.6安装路径选择与磁盘空间优化全攻略当GIS初学者第一次安装ArcGIS 10.6时,往往会被其庞大的安装体积所震惊。许多用户习惯性地点击"下一步",结果发现C盘空间被迅速吞噬,系统运行变得迟缓。本文将深…...

Python PIL 画矩形框
基础代码 from PIL import Image, ImageDraw# 打开图片 img Image.open(your_image.jpg)# 创建绘图对象 draw ImageDraw.Draw(img)# 矩形坐标 (x1, y1, x2, y2) coords (23, 21, 69, 76)# 画矩形框(红色,线宽2) draw.rectangle(coords, ou…...

终极指南:5步快速掌握免费的3D点云标注工具labelCloud
终极指南:5步快速掌握免费的3D点云标注工具labelCloud 【免费下载链接】labelCloud A lightweight tool for labeling 3D bounding boxes in point clouds. 项目地址: https://gitcode.com/gh_mirrors/la/labelCloud 想要为自动驾驶、机器人视觉或3D目标检测…...

具身智能:面向新兴交叉学科建设的思考与建议 2026
这份由 CCF YOCSEF 长三角五地学术委员会 2026 年 5 月发布的白皮书,聚焦具身智能作为新兴交叉学科的建设,明确其并非 AI 与机器人学的简单拼接,而是围绕物理交互中的智能行为形成的新问题域,提出 “三大基本问题 一个应用需求”…...

Performance-Fish:让你的《环世界》后期游戏帧率提升400%的终极优化方案
Performance-Fish:让你的《环世界》后期游戏帧率提升400%的终极优化方案 【免费下载链接】Performance-Fish Performance Mod for RimWorld 项目地址: https://gitcode.com/gh_mirrors/pe/Performance-Fish 你是否曾在《环世界》游戏后期,面对庞大…...

危急时刻的六条基本安全提示
人机协作,AI模型:Deepseek 仅供参考 危急时刻的六条基本安全提示 以下内容仅为通用性安全建议,供在紧急情况下保持冷静、保护自身安全时参考。所有建议均基于常理和公共安全常识,不包含任何具体操作细节或可能被不当使用的信息…...

Elden Ring帧率解锁终极指南:从60帧到144+的完整教程
Elden Ring帧率解锁终极指南:从60帧到144的完整教程 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/Elden…...

Xia Sql插件:可调试的SQL注入决策引擎
1. 这不是又一个“自动扫SQL”的插件,而是把渗透工程师的判断逻辑塞进了Burp里你有没有过这种经历:在Burp Proxy里看着一堆GET参数、POST JSON、Cookie字段,心里清楚“这里大概率能注入”,但手动拼payload试了七八轮,还…...

Godot 2D随机地图三大静默故障:黑屏、穿墙、寻路失败的根源与修复
1. 为什么刚上手Godot做2D随机地图就总卡在“生成出来是黑的”“角色穿墙”“房间连不通”这三件事上?如果你是刚从Unity或GameMaker转来Godot,或者第一次用GDScript写程序逻辑的新手,大概率已经在2D随机地图生成这个环节反复摔过跟头——不是…...