Linux之时间子系统(四): tick 层模块(periodic 和dynamic )
一、时间子系统的软件架构

二、tick 层模块的文件
tick-common.c
tick-oneshot.c
tick-sched.c
tick-broadcast.c
tick-broadcast-hrtimer.c
这三个文件属于tick device layer。
tick-common.c文件是periodic tick模块,用于管理周期性tick事件。
tick-oneshot.c文件是for高精度timer的,用于管理高精度tick时间。
tick-sched.c是用于dynamic tick的。
tick-broadcast.c 和 tick-broadcast-hrtimer.c 是broadcast tick模块。
如果说每个.c文件是一个模块的话,我们可以首先简单描述tick device layer的各个模块。tick-common.c描述了tick device的一些通用操作,此外,该文件还包括了周期性tick的代码。想要让系统工作在tickless mode(更准确应该是Dynamic tick模块,也就是说根据系统的当前运行状况,动态的启停周期性tick)需要两个模块的支持,分别是tick-oneshot.c和tick-sched.c。tick-oneshot.c主要是提供和tick device的one shot mode相关的操作接口函数。从字面上看,tick-sched.c是和tick的调度相关,所谓tick的调度包括两个方面,一方面是在系统正常运行过程中,如何产生周期性的tick event,另一方面是在系统没有任务执行,进入idle状态的时候,如何停止周期性的tick,以及恢复的时候如何更新系统状态(例如:jiffies等)。tick-broadcast.c和tick-broadcast-hrtimer.c是和tick broadcast相关,本文不会涉及这部分的内容,会有专门的文档描述它
1、什么是tick
想要理解什么是tick device,什么是tickless kernel,首先当然要理解什么是tick?要理解什么是tick,首先要理解OS kernel是如何运作的。系统中有很多日常性的事情需要处理,例如:
---更新系统时间
---处理低精度timer
---处理正在运行进程的时间片信息
系统在处理这些事情的时候使用了轮询的方式,也就是说按照固定的频率去做这些操作。这时候就需要HW的协助,一般而言,硬件会有HW timer(称之system timer)可以周期性的trigger interrupt,让系统去处理上述的日常性事务。每次timer中断到来的时候,内核的各个模块就知道,一个固定的时间片已经过去。对于日常生活,tick这个概念是和钟表关联的:钟表会发出周期性的滴答的声音,这个声音被称为tick。CPU和OS kernel扩展了这个概念:周期性产生的timer中断事件被称为tick,而能够产生tick的设备就称为tick device。
如何选择tick的周期是需要在power comsuption、时间精度以及系统响应时间上进行平衡。我们考虑系统中基于tick的低精度timer模块,选择较高的tick频率会提高时间精度,例如对于,10ms的tick周期意味着低精度timer的时间精度就是10ms,设定3ms的低精度timer没有任何意义。为了提高时间精度,我们可以提高tick的频率,例如可以提升到1ms的tick,但是,这时更多的CPU的时间被花费在timer的中断处理,实际上,当系统不繁忙的时候,并不是每一个tick都是那么有意义,实际上大部分的tick到来的时候,OS kernel往往只是空转,实际上并有什么事情做,这对系统的power consumption是有害的。对于嵌入式设备,周期性的tick对power consumption危害更大,因为对于嵌入式设备,待机时间是一个很重要的指标,而周期性tick则意味着系统不可能真正的进入idle状态,而是会周期性的被wakeup,这些动作会吃掉电池的电量。同理,对于调度器而言亦然。如果设定10ms的tick,分配每个进程的时间片精度只是10ms,调度器计算每个进程占用CPU的时间也只能是以10ms为单位。为了提高进程时间片精度,我们可以提高tick的频率,例如可以提升到1ms的tick,但是,这时更多的CPU的时间被花费在进程上下文的切换上,但是,对应的好处是系统的响应时间会更短。
三、periodic tick 模块
1、数据结构
在内核中,使用struct tick_device来抽象系统中的tick设备,如下:
struct tick_device {
struct clock_event_device *evtdev;
enum tick_device_mode mode;
};
从上面的定义就可以看出:所谓tick device其实就是工作在某种模式下的clock event设备。工作模式体现在tick device的mode成员,evtdev指向了和该tick device关联的clock event设备。
tick device的工作模式定义如下:
enum tick_device_mode {
TICKDEV_MODE_PERIODIC,
TICKDEV_MODE_ONESHOT,
};
tick device可以工作在两种模式下,一种是周期性tick模式,另外一种是one shot模式。one shot模式主要和tickless系统以及高精度timer有关。
2、tick device的分类以及和CPU的关系
(1) local tick device。在单核系统中,传统的unix都是在tick驱动下进行任务调度、低精度timer触发等,在多核架构下,系统为每一个cpu建立了一个tick device,如下:
DEFINE_PER_CPU(struct tick_device, tick_cpu_device);
local tick device的clock event device应该具备下面的特点:
(a)该clock event device对应的HW timer必须是和该CPU core是有关联的的(也就是说,该hw timer的中断是可以送达到该CPU core的)。struct clock_event_device 有一个cpumask成员,它可以指示该clock event device为哪一个或者哪几个CPU core工作。如果采用ARM generic timer的硬件,其HW timer总是为一个CPU core服务的,我们称之为per cpu timer。
(b)该clock event device支持one shot模式,并且精度最高(rating最大)
(2)global tick device。具体定义如下:
int tick_do_timer_cpu __read_mostly = TICK_DO_TIMER_BOOT;
有些任务不适合在local tick device中处理,例如更新jiffies,更新系统的wall time,更新系统的平均负载(不是单一CPU core的负载),这些都是系统级别的任务,只需要在local tick device中选择一个作为global tick device就OK了。tick_do_timer_cpu指明哪一个cpu上的local tick作为global tick。
(3)broadcast tick device,定义如下:
static struct tick_device tick_broadcast_device;
我们会单独一份文档描述它,这里就不再描述了。
四、初始化tick device
1、注册一个新的clock event device的时候,tick device layer要做什么?
在clock_event的文章中,我们知道:底层的timer硬件驱动在初始化的时候会注册clock event device,在注册过程中就会调用tick_check_new_device函数来看看是否需要进行tick device的初始化,如果已经已经初始化OK的tick device是否有更换更高精度clock event device的需求。代码如下:
void tick_check_new_device(struct clock_event_device *newdev)
{
struct clock_event_device *curdev;
struct tick_device *td;
int cpu;cpu = smp_processor_id();-----------------(1)
td = &per_cpu(tick_cpu_device, cpu);---获取当前cpu的tick device
curdev = td->evtdev; ---目前tick device正在使用的clock event deviceif (!tick_check_percpu(curdev, newdev, cpu))---------(2)
goto out_bc;if (!tick_check_preferred(curdev, newdev))-----------(3)
goto out_bc;if (!try_module_get(newdev->owner)) -----增加新设备的reference count
return;
if (tick_is_broadcast_device(curdev)) { -------------(4)
clockevents_shutdown(curdev);
curdev = NULL;
}
clockevents_exchange_device(curdev, newdev); ---通知clockevent layer
tick_setup_device(td, newdev, cpu, cpumask_of(cpu)); --------(5)
if (newdev->features & CLOCK_EVT_FEAT_ONESHOT)
tick_oneshot_notify();
return;out_bc:
tick_install_broadcast_device(newdev); ----其他文档中描述
}
(1)是否是为本CPU服务的clock event device?如果不是,那么不需要考虑per cpu tick device的初始化或者更换该cpu tick device的clock event device。当然,这是还是可以考虑用在broadcast tick device的。
(2)第二个关卡是per cpu的检查。如果检查不通过,那么说明这个新注册的clock event device和该CPU不来电,不能用于该cpu的local tick。如果注册的hw timer都是cpu local的(仅仅属于一个cpu,这时候该clock event device的cpumask只有一个bit被set),那么事情会比较简单。然而,事情往往没有那么简单,一个hw timer可以服务多个cpu。我们这里说HW timer服务于某个cpu其实最重要的是irq是否可以分发到指定的cpu上。我们可以看看tick_check_percpu的实现:
static bool tick_check_percpu(struct clock_event_device *curdev,
struct clock_event_device *newdev, int cpu)
{
if (!cpumask_test_cpu(cpu, newdev->cpumask))---------(a)
return false;
if (cpumask_equal(newdev->cpumask, cpumask_of(cpu)))--------(b)
return true;
if (newdev->irq >= 0 && !irq_can_set_affinity(newdev->irq))-------(c)
return false;
if (curdev && cpumask_equal(curdev->cpumask, cpumask_of(cpu)))---(d)
return false;
return true;
}
(a)判断这个新注册的clock event device是否可以服务该CPU,如果它根本不鸟这个cpu那么不用浪费时间了。
(b)判断这个新注册的clock event device是否只服务该CPU。如果这个clock event device就是服务该cpu的,那么别想三想四了,这个clock event device就是你这个CPU的人了。
(c)如果能走到这里,说明该clock event device可以服务多个CPU,指定的cpu(作为参数传递进来)只是其中之一而已,这时候,可以通过设定irq affinity将该clock event device的irq定向到该cpu。当前,前提是可以进行irq affinity的设定,这里就是进行这样的检查。
(d)走到这里,说明该新注册的clock event device是可以进行irq affinity设定的。我们可以通过修改irq affinity让该hw timer服务于这个指定的CPU。恩,听起来有些麻烦,的确如此,如果当前CPU的tick device正在使用的clock event device就是special for当前CPU的(根本不鸟其他CPU),有如此专情的clock event device,夫复何求,果断拒绝新注册的设备。
(3)程序来到这里,说明tick_check_percpu返回true,CPU和该clock event device之间的已经是眉目传情了,不过是否可以入主,就看该cpu的原配是否有足够强大的能力(精度和特性)。tick_check_preferred代码如下:
static bool tick_check_preferred(struct clock_event_device *curdev,
struct clock_event_device *newdev)
{
if (!(newdev->features & CLOCK_EVT_FEAT_ONESHOT)) {-----(a)
if (curdev && (curdev->features & CLOCK_EVT_FEAT_ONESHOT))
return false;
if (tick_oneshot_mode_active())
return false;
}return !curdev ||
newdev->rating > curdev->rating ||
!cpumask_equal(curdev->cpumask, newdev->cpumask);------(b)
}
(a)首先进行one shot能力比拼。如果新的clock event device没有one shot能力而原配有,新欢失败。如果都没有one shot的能力,那么要看看当前系统是否启用了高精度timer或者tickless。本质上,如果clock event device没有oneshot功能,那么高精度timer或者tickless都是处于委曲求全的状态,如果这样,还是维持原配的委曲求全的状态,新欢失败
(b)如果current是NULL的话,事情变得非常简单,当然是新来的这个clock event device胜出了(这时候,后面的比较都没有意义了)。如果原配存在的话,那么可以看rating,如果新来的精度高,那也选择新来的clock event device。是否精度低就一定不选新的呢?也不是,新设备还是有机会力挽狂澜的:如果新来的是local timer,而原配是非local timer,这时候,也可以考虑选择新的,毕竟新来的clock event device是local timer,精度低一些也没有关系。
当tick_check_percpu返回true的时候有两种情况:一种是不管current是什么状态,新设备是CPU的local timer(只为这个cpu服务,即cpumask 和当前cpu相等)。另外一种情况是新设备不是CPU的local timer,当然原配也没有那么专一。
我们先看看第一种情况:如果cpumask_equal返回true,那么说明原配也是local timer,那么没有办法了,谁的rating高就选谁。如果cpumask_equal返回false,那么说明原配不是local timer,那么即便新来的rating低一些也还是优先选择local timer。
我们再看看第二种情况:新clock_event_device 虽然是个海王,但是可以设置中断亲和性,即可以给cpu 发生中断,同时本地的clock_event_device 不存在 或者 本地的clock_event_device 也是个海王,就返回true,进行下一轮的判断;
(4)OK,经过复杂的检查,我们终于决定要用这个新注册的clock event device来替代current了(当然,也有可能current根本不存在)。在进行替换之前,我们还有检查一下current是否是broadcast tick device,如果是的话,还不能将其退回clockevents layer,仅仅是设定其状态为shutdown。curdev = NULL这一句很重要,在clockevents_exchange_device函数中,如果curdev == NULL的话,old device将不会从全局链表中摘下,挂入clockevents_released链表。
(5)setup tick device,参考下一节描述。
2、如何Setup 一个 tick device?
所谓setup一个tick device就是对tick device心仪的clock event设备进行设置,并将该tick device的evtdev指向新注册的这个clock event device,具体代码如下:
static void tick_setup_device(struct tick_device *td,
struct clock_event_device *newdev, int cpu,
const struct cpumask *cpumask)
{
ktime_t next_event;
void (*handler)(struct clock_event_device *) = NULL;if (!td->evtdev) {
if (tick_do_timer_cpu == TICK_DO_TIMER_BOOT) {-------(1)
……
}td->mode = TICKDEV_MODE_PERIODIC;----------(2)
} else {
handler = td->evtdev->event_handler;
next_event = td->evtdev->next_event;
td->evtdev->event_handler = clockevents_handle_noop; -------(3)
}td->evtdev = newdev; -----终于修成正果了,呵呵
if (!cpumask_equal(newdev->cpumask, cpumask)) ---------------(4)
irq_set_affinity(newdev->irq, cpumask);if (tick_device_uses_broadcast(newdev, cpu)) -------留给broadcast tick文档吧
return;if (td->mode == TICKDEV_MODE_PERIODIC)
tick_setup_periodic(newdev, 0); ----------------------(5)
else
tick_setup_oneshot(newdev, handler, next_event); -----其他文档描述
}
(1)在multi core的环境下,每一个CPU core都自己的tick device(可以称之local tick device),这些tick device中有一个被选择做global tick device,负责维护整个系统的jiffies。如果该tick device的是第一次设定,并且目前系统中没有global tick设备,那么可以考虑选择该tick设备作为global设备,进行系统时间和jiffies的更新。更细节的内容请参考timekeeping文档。
(2)在最初设定tick device的时候,缺省被设定为周期性的tick。当然,这仅仅是初始设定,实际上在满足一定的条件下,在适当的时间,tick device是可以切换到其他模式的,下面会具体描述。
(3)旧的clockevent设备就要退居二线了,将其handler修改为clockevents_handle_noop。
(4)如果不是local timer,那么还需要调用irq_set_affinity函数,将该clockevent的中断,定向到本CPU。
(5)tick_setup_periodic的代码如下(注:下面的代码分析中暂不考虑broadcast tick的情况):
void tick_setup_periodic(struct clock_event_device *dev, int broadcast)
{
tick_set_periodic_handler(dev, broadcast); ----设定event handler为tick_handle_periodicif ((dev->features & CLOCK_EVT_FEAT_PERIODIC) && !tick_broadcast_oneshot_active()) {
clockevents_set_mode(dev, CLOCK_EVT_MODE_PERIODIC);---------(a)
} else {
unsigned long seq;
ktime_t next;do {
seq = read_seqbegin(&jiffies_lock);
next = tick_next_period; -----获取下一个周期性tick触发的时间
} while (read_seqretry(&jiffies_lock, seq));clockevents_set_mode(dev, CLOCK_EVT_MODE_ONESHOT); ---模式设定
for (;;) {
if (!clockevents_program_event(dev, next, false)) ----program next clock event
return;
next = ktime_add(next, tick_period); ------计算下一个周期性tick触发的时间
}
}
}
(a)如果底层的clock event device支持periodic模式,那么直接调用clockevents_set_mode设定模式就OK了
(b)如果底层的clock event device不支持periodic模式,而tick device目前是周期性tick mode,那么要稍微复杂一些,需要用clock event device的one shot模式来实现周期性tick。
五、周期性tick的运作
1、从中断到clock event handler
一般而言,底层的clock event chip driver会注册中断,我们用ARM generic timer驱动为例,注册的代码如下:
…
err = request_percpu_irq(ppi, arch_timer_handler_phys, "arch_timer", arch_timer_evt);
……
具体的timer的中断handler如下:
static irqreturn_t arch_timer_handler_phys_mem(int irq, void *dev_id)
……
{
evt->event_handler(evt);
……
}
也就是说,在timer interrupt handler中会调用clock event device的event handler,而在周期性tick的场景下,这个event handler被设定为tick_handle_periodic。
2、周期性tick的clock event handler的执行分析
由于每个cpu都有自己的tick device,因此,在每个cpu上,每个tick到了的时候,都会调用tick_handle_periodic函数进行周期性tick中要处理的task,具体如下:
/*
* Event handler for periodic ticks
*/
void tick_handle_periodic(struct clock_event_device *dev)
{
int cpu = smp_processor_id();
ktime_t next = dev->next_event;tick_periodic(cpu); //周期性tick中要处理的内容
#if defined(CONFIG_HIGH_RES_TIMERS) || defined(CONFIG_NO_HZ_COMMON)
/*
* The cpu might have transitioned to HIGHRES or NOHZ mode via
* update_process_times() -> run_local_timers() ->
* hrtimer_run_queues().
*/
if (dev->event_handler != tick_handle_periodic)
return;
#endifif (!clockevent_state_oneshot(dev))
return;
for (;;) {
/*
* Setup the next period for devices, which do not have
* periodic mode:
*/
next = ktime_add(next, tick_period); //计算下一个周期性tick触发的时间if (!clockevents_program_event(dev, next, false))//设定下一个clock event触发的时间
return;
/*
* Have to be careful here. If we're in oneshot mode,
* before we call tick_periodic() in a loop, we need
* to be sure we're using a real hardware clocksource.
* Otherwise we could get trapped in an infinite
* loop, as the tick_periodic() increments jiffies,
* which then will increment time, possibly causing
* the loop to trigger again and again.
*/
if (timekeeping_valid_for_hres())
tick_periodic(cpu);
}
}
如果该tick device所属的clock event device工作在one shot mode,那么还需要为产生周期性tick而进行一些额外处理。
2、周期性tick中要处理的内容
代码如下:
/*
* Periodic tick
*/
static void tick_periodic(int cpu)
{
if (tick_do_timer_cpu == cpu) { //global tick需要进行一些额外处理
raw_spin_lock(&jiffies_lock);
write_seqcount_begin(&jiffies_seq);/* Keep track of the next tick event */
tick_next_period = ktime_add(tick_next_period, tick_period);do_timer(1); //更新jiffies,计算平均负载
write_seqcount_end(&jiffies_seq);
raw_spin_unlock(&jiffies_lock);
update_wall_time(); //更新wall time
}update_process_times(user_mode(get_irq_regs())); //更新和当前进程相关的内容
profile_tick(CPU_PROFILING);// 和性能剖析相关
}
六、dynamic tick 模块
1、什么是tickless?
tickless本质上上是去掉那个烦恼的滴答声音。对于OS kernel而言,tickless也就是意味着没有那个固定周期的timer interrupt事件,可是,没有那个固定的tick,OS kernel如何运转呢?
①首先看看如何处理timer。各种驱动和内核模块(例如网络子系统的TCP模块)都有timer的需求,因此,时间子系统需要管理所有注册到系统的timer。对于有tick的系统,在每个tick中scan所有的timer是一个顺理成章的想法,如果检查到timer超期(或者即将超期)系统会调用该timer的callback函数。当然,由于要在每个tick到来的时候检查timer,因此效率非常重要,内核有一些有意思的设计,有兴趣的读者可以看看低精度timer的的scan过程。
没有tick怎么办?这时候需要找到所有timer中最近要超期的timer,将其时间值设定到实际的HW timer中就OK了,当然,这时候需要底层的HW timer支持one shot,也就是说,该timer的中断就来一次,在该timer的的中断处理中除了处理超期函数之外,还需要scan所有timer,找到最近要超期的timer,将其时间值设定到实际的HW timer中就OK了,然后不断的重复上面的过程就OK了。假设系统中注册了1200ns, 1870ns, 2980ns, 4500ns, 5000ns和6250ns的timer,在一个HZ=1000的系统上,timer的超期都是在规则的tick时间点上,对于tickless的系统,timer的中断不是均匀的,具体如下图所示:
②我们再来看看更新系统时间。对于有tick的系统,非常简单,在每个tick到来的时候调用update_wall_time来更新系统时间,当然,由于是周期性tick,这时候每次都是累加相同的时间。对于tickless的系统,我们可以选择在每个timer超期的中断中调用update_wall_time来更新系统时间,不过,这种设计不好,一方面,如果系统中的timer数目太多,那么update_wall_time调用太频繁,而实际上是否系统需要这么高精度的时间值呢?更重要的是:timer中断到来是不确定的,和系统中的timer设定相关,有的时间段timer中断比较频繁,获取的系统时间精度比较高,有的时间段,timer中断比较稀疏,那么获取的系统时间精度比较低。
有一个问题:目前最新内核中,对于tickless 时,是如何更新wall_time ?
③看调度器怎么适应tickless。我们知道,除非你是一个完全基于优先级的调度器,否则系统都会给进程分配一个时间片(time slice),当占用CPU的时间片配额使用完了,该进程会挂入队列,等待调度器分配下一个时间片,并调度运行。有tick当然比较简单,在该tick的timer中断中减去当前进程的时间片。没有tick总是比较麻烦,我能想到的方法是:假设我们给进程分配40ms的时间片,那么在调度该进程的时候需要设定一个40ms的timer,timer到期后,调度器选择另外一个进程,然后再次设定timer。当然,如果没有进程优先级的概念(或者说优先级仅仅体现在分配的时间片比较多的情况下),并且系统中处于runnable状态的进程较少,整体的运作还是OK的。如果有优先级概念怎么办?如果进程执行过程中被中断打断,切换到另外的进程怎么办?如果系统内的进程数目很多如何保证调度器的性能?算了,太复杂了,还是有tick比较好,因此实际中,linux kernel在有任务执行的时候还是会启动周期性的tick。当然,世界上没有绝对正确的设计,任何优雅的设计都是适用于一定的应用场景的。其实自然界的规律不也是这样吗?牛顿的定律也不是绝对的正确,仅仅适用于低速的场景,当物体运动的速度接近光速的时候,牛顿的经典力学定律都失效了。
2、内核中的tickless
本节我们主要来看看内核中的tickless的情况。传统的unix和旧的linux(2000年初之前的)都是有tick的(对于新的内核,配置CONFIG_HZ_PERIODIC的情况下也是有tick的),新的linux kernel中增加了tickless的选项:
---CONFIG_NO_HZ_IDLE
---CONFIG_NO_HZ_FULL
CONFIG_NO_HZ_IDLE是说在系统dile的时候是没有tick的,当然,在系统运行的时候还是有tick的,因此,我们也称之dynamic tick或者NO HZ mode。3.10版本之后,引入一个full tickless mode,听起来好象任何情况下都是没有tick的,不过实际上也没有那么强,除了CPU处于idle的时候可以停下tick,当CPU上有且只有一个进程运行的时候,也可以停下周期性tick,其他的情况下,例如有多个进程等待调度执行,都还是有tick的。这个配置实际上只是对High-performance computing (HPC)有意义的,因此不是本文的重点。
3、tick device概述
Tick device是能够提供连续的tick event的设备。目前linux kernel中有periodic tick和one-shot tick两种tick device。periodic tick可以按照固定的时间间隔产生tick event。one-shot tick则是设定后只能产生一次tick event,如果要连续产生tick event,那么需要每次都进行设定。
每一个cpu都有属于自己的tick device。定义为tick_cpu_device。每一个tick device都有自己的类型(periodic或者one-shot),每一个tick device其实就是一个clock event device(增加了表示mode的member),不同类型的tick device有不同的event handler。对于periodic类型的tick设备,其clock event device的event handler是tick_handle_periodic(没有配置高精度timer)或者hrtimer_interrupt(配置了高精度timer)。对于one-shot类型的tick设备,其clock event device的event handler是hrtimer_interrupt(配置了高精度timer)或者tick_nohz_handler(没有配置高精度timer)。
Tick Device模块负责管理系统中的所有的tick设备,在SMP环境下,每一个CPU都自己的tick device,这些tick device中有一个被选择做global tick device,该device负责维护整个系统的jiffies以及更新哪些基于jiffies进行的全系统统计信息。
4、kernel如何初始化tick device layer以及周期性tick的运作?
如果把tick device的逻辑当作一个故事,那么故事的开始来自clockevent device layer。每当底层有新的clockevent device加入到系统中的时候,会调用clockevents_register_device或者clockevents_config_and_register向通用clockevent layer注册一个新的clockevent设备,这时候,会调用tick_check_new_device通知tick device layer有新货到来。如果tick device和clockevent device你情我愿,那么就会调用tick_setup_device函数setup这个tick device了。一般而言,刚系统初始化的时候,所有cpu的tick device都没有匹配clock event device,因此,该cpu的local tick device也就是global tick device了。而且,如果tick device是新婚(匹配之前,tick device的clock event device等于NULL),那么tick device的模式将被设定为TICKDEV_MODE_PERIODIC,即便clock event有one shot能力,即便系统配置了NO HZ。好吧,反正无论如何都需要从周期性tick开始,那么看看如何进行周期性tick的初始化的。
tick_setup_periodic函数用来设定一个periodic tick device。当然,最重要的设定event handler,对于周期性tick device,其clock event device的handler被设定为tick_handle_periodic。光有handler也不行,还得kick off底层的硬件,让其周期性的产生clock event,这样才能推动系统的运作(这是通过调用clockevent device layer的接口函数完成的)。
最后,我们思考一个问题:系统启动过程中,什么时候开始有tick?多核系统,BSP首先启动,在其初始化过程中会调用time_init,这里会启动clocksource的初始化过程。这时候,周期性的tick就会开始了。在某个阶段,其他的processor会启动,然后会注册其自己的local timer,这样,各个cpu上的tick就都启动了
七、设置了高精度timer的情况下,dynamic tick如何运作?
1、软件层次
下面的这幅图是以tick device为核心,描述了该模块和其他时间子系统模块的交互过程(配置高精度timer和dynamic tick的情况):
上图中,红色边框的模块是per cpu的模块,所谓per cpu就是说每个cpu都会维护属于一个自己的对象。例如,对于tick device,每个CPU都会维护自己的tick device,不过,为了不让图片变得太大,上图只画了一个CPU的情况,其他CPU的动作是类似。为何clock event没有被涂上红色的边框呢?实际上clock event device并不是per cpu的,有些per cpu的local timer,也有global timer,如果硬件设计人员愿意的话,一个CPU可以有多个local timer,系统中所有的timer硬件被抽象成一个个的clock event device进行系统级别的管理,每个CPU并不会特别维护一个属于自己的clock event device。弱水三千,只取一瓢。每个CPU只会在众多clock event device中选取那个最适合自己的clock event device构建CPU local tick device。
tick device系统的驱动力来自中断子系统,当HW timer(tick device使用的那个)超期会触发中断,因此会调用hrtimer_interrupt来驱动高精度timer的运转(执行超期timer的call back函数)。而在hrtimer_interrupt中会扫描保存高精度timer的红黑树,找到下一个超期需要设定的时间,调用tick_program_event来设定下一次的超期事件,你知道的,这是我们的tick device工作在one shot mode,需要不断的set next expire time,才能驱动整个系统才会不断的向前。
传统的低精度timer是周期性tick驱动的,但是,目前tick 处于one shot mode,怎么办?只能是模拟了,Tick device layer需要设定一个周期性触发的高精度timer,在这个timer的超期函数中(tick_sched_timer)执行进行原来周期性tick的工作,例如触发TIMER_SOFTIRQ以便推动系统低精度timer的运作,更新timekeeping模块中的real clock。
2、如何切换到tickless
我们知道,开始tick device总是工作在周期性tick的mode,一切就像过去一样,无论何时,系统总是有那个周期性的tick到来。这个周期性的tick是由于硬件timer的中断推动,该HW Timer的中断会注册soft irq,因此,HW timer总会周期性的触发soft irq的执行,也就是run_timer_softirq函数。在该函数中会根据情况将hrtimer切换到高精度模式(hrtimer也有两种mode,一种高精度mode,一种是低精度mode,系统总是从低精度mode开始)。在系统切换到高精度timer mode的时候(hrtimer_switch_to_hres),由于高精度timer必须需要底层的tick device运行在one shot mode,因此,这时会调用tick_switch_to_oneshot函数将该CPU上的tick device的mode切换置one shot(Note:这时候event handler设定为hrtimer_interrupt)。同样的,底层的clock event device也会被设定为one shot mode。一旦进入one shot mode,那个周期性到来的timer中断就会消失了,从此系统只会根据系统中的hrtimer的设定情况来一次性的设定底层HW timer的触发。
3、如何产生周期性tick
虽然tick device以及底层的HW timer都工作在one shot mode,看起来系统的HW timer中断都是按需产生,多么美妙。但是,由于各种原因(此处省略3000字),在系统运行过程中,那个周期性的tick还需要保持,因此,在切换到one shot mode的同时,也会调用tick_setup_sched_timer函数创建一个sched timer(一个普通的hrtimer而已),该timer的特点就是每次超期后还会调用hrtimer_forward,不断的将自己挂回hrtimer的红黑树,于是乎,tick_sched_do_timer接口按照tick的周期不断的被调用,从而模拟了周期性的tick。
4、在idle的时候如何停掉tick
我们知道,各个cpu上的swapper进程(0号进程,又叫idle进程)最后都是会执行cpu_idle_loop函数,该函数在真正执行cpu idle指令之前会调用tick_nohz_idle_enter,在该函数中,sched timer会被停掉,因此,周期性的HW timer不会再来,这时候将cpu从idle中唤醒的只能是和实际上系统中的hrtimer中的那个最近的超期时间有关。
5、如何恢复tick
概念同上,当从idle中醒来,tick_nohz_idle_exit函数被调用,重建sched timer,一切恢复了原状。
6、没有设置高精度timer的情况下,dynamic tick如何运作?
相关文章:
Linux之时间子系统(四): tick 层模块(periodic 和dynamic )
一、时间子系统的软件架构 二、tick 层模块的文件 tick-common.c tick-oneshot.c tick-sched.c tick-broadcast.c tick-broadcast-hrtimer.c 这三个文件属于tick device layer。 tick-common.c文件是periodic tick模块,用于管理周期性tick事件。 tick-oneshot.c文…...
Docker Command
小试牛刀 # 查看docker版本 docker -v docker --version # 查看帮助 docker --help # 永远的Hello World docker run hello-world镜像操作 查看本地已有的镜像 docker images -a :列出本地所有的镜像(含中间映像层) -q :只显示镜像ID --digests :显示…...

Linux系统部署Paperless-Ngx文档管理系统结合内网穿透实现公网访问
文章目录 1. 部署Paperless-ngx2. 本地访问Paperless-ngx3. Linux安装Cpolar4. 配置公网地址5. 远程访问6. 固定Cpolar公网地址7. 固定地址访问 Paperless-ngx是一个开源的文档管理系统,可以将物理文档转换成可搜索的在线档案,从而减少纸张的使用。它内置…...

6.shell case控制语句
case控制语句 1.什么是case case条件语句相当于多分支的if/elif/else条件语句,主要还是用来做条件判断的,常被应用于实现系统服务启动脚本。 case语句中,会将case获取的变量值与表达式部分的值1、值2、值3等逐个进行比较,如果变量值和某个表…...

如何判断HDMI接口版本是1.4还是2.0呢?
如何判断HDMI接口版本是1.4还是2.0呢? HDMI是一种用于传输高质量音频和视频信号的接口标准。随着技术的不断发展,HDMI接口也经历了多次升级和改进。在市场上,常见的HDMI接口版本包括1.4和2.0。判断HDMI接口版本主要通过以下几种方法ÿ…...

【开发环境搭建篇】NodeJS的安装和配置
作者介绍:本人笔名姑苏老陈,从事JAVA开发工作十多年了,带过大学刚毕业的实习生,也带过技术团队。最近有个朋友的表弟,马上要大学毕业了,想从事JAVA开发工作,但不知道从何处入手。于是࿰…...
)
【Docker】docker和docker-compose一键安装脚本(linux)
一、准备和运行脚本 当前脚本下载的docker和docker-compose兼容系统架构为x64,可以根据自己实际系统版本更改下载链接 1. 在控制台使用vim新建: vim install-docker.sh2. 复制内容并粘贴: #!/usr/bin/env bash # 设置脚本在遇到错误时终止执行 set -…...
在 Windows 中安装配置并启动运行 Jenkins【图文详细教程】
安装 Jenkins 的系统要求: 最少 256MB 可用内存最少 1GB 可用磁盘空间JDK 8 / 11 /17(Jenkins 是用 Java 写的,打包成 war 包) 查看 JDK 的版本 Java JDK 在 Windows 中安装可以参考:https://www.yuque.com/u27599042/…...

C# 读取txt文本所有行
引用:System.IO; Path.Combine(); //将字符串组合成一个路径 Path.GetFullPath(); //返回指定路径的绝对路径 File.ReadAllLines(); //读取文本框返回一个数组 File.ReadAllText(); //读取文本框返回一个字符串 File.ReadAllBytes(); //读取文本框返回字节 …...
STM32使用常见错误合集(正在更新版)
本文章记录一些学习STM32的一些错误问题,师承江科大哈哈哈 一、编译、烧录类问题 1、烧录不成功,Keil提示RDDI-DAP Error【场景:PWM驱动直流电机】 解决方案:将电机断开再进行烧录,断开后就可以美美烧录不报错啦~ …...

Java Random类
一、Random类 在项目开发中,经常需要使用随机数值,例如,网站登录中的验证码,或者需要以一定概率实现的某种效果(如游戏程序中的物品掉落等),就需要Java提供的Random类,该类用于生成…...

【Spring Cloud】微服务通信概述
SueWakeup 个人主页:SueWakeup 系列专栏:学习技术栈 个性签名:人生乏味啊,我欲令之光怪陆离 本文封面由 凯楠📷 友情赞助播出 目录 前言 1. Dubbo(Spring Cloud Alibaba)和 Spring Cloud 的适…...
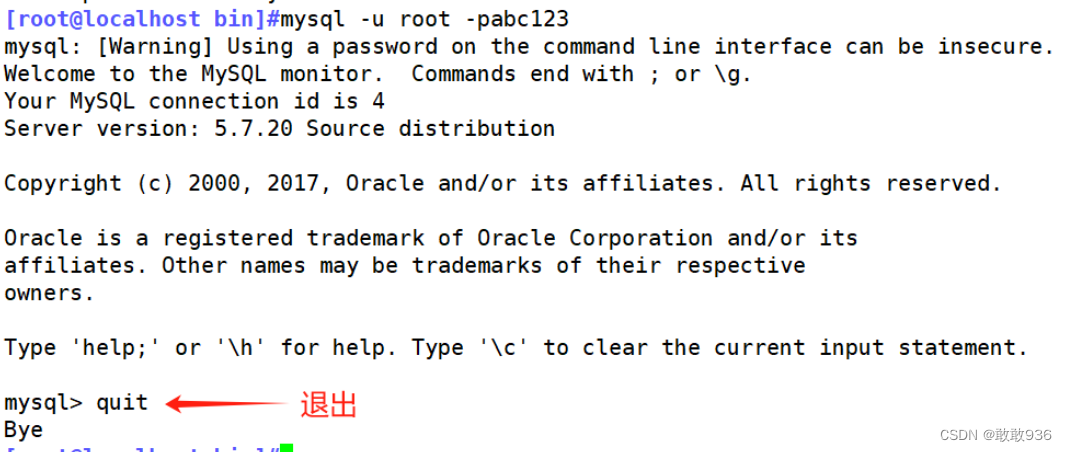
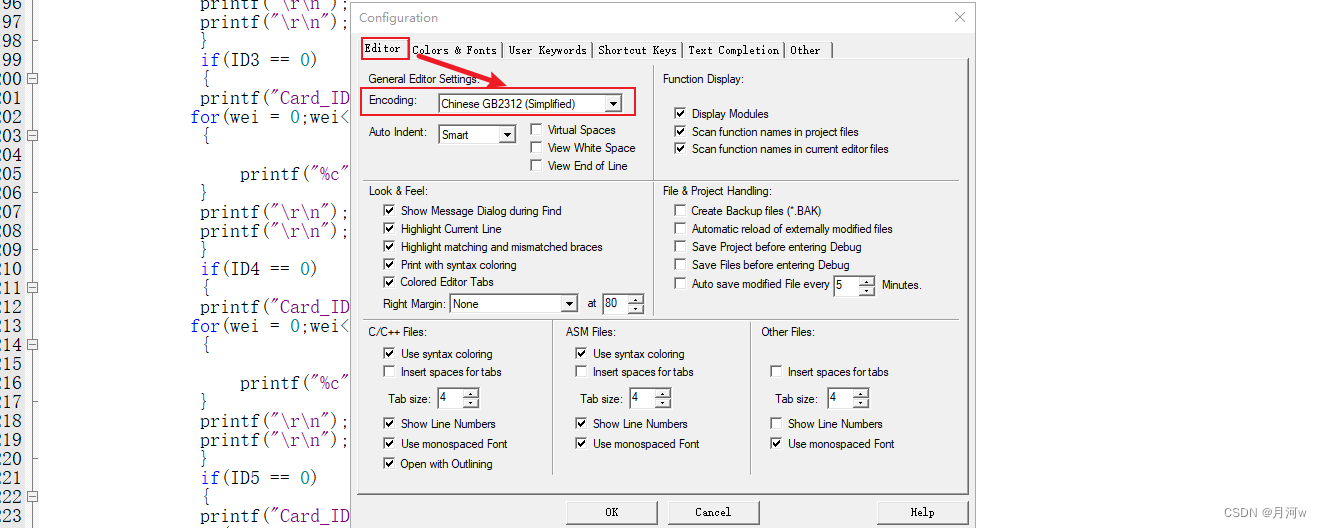
MySQL的概述与安装
一、数据库的基本概念: 1.1 数据: 1) 描述事物的符号记录称为数据(Data)。数字、文字、图形、图像、声音、档案记录等 都是数据。 2)数据是以“记录”的形式按照统一的格式进行存储的,而不是…...

《被讨厌的勇气》书摘2
发生什么不重要,怎样看待才重要 生活的真谛就是活在当下 来自他人和社会的评价,造成了我们的骄傲和自卑。人们经常借“爱”之名,行控制之实 学会课题分离 当我们发现自己的价值的时候,才具备了让自己真正自由和自主的勇气 人…...

基于SpringBoot的会员制医疗预约服务管理信息系统
开发语言:Java 框架:springboot JDK版本:JDK1.8 服务器:tomcat7 数据库:mysql 5.7 数据库工具:Navicat11 开发软件:eclipse/myeclipse/idea 系统展示 系统功能模块 会员制医疗预约服务管…...
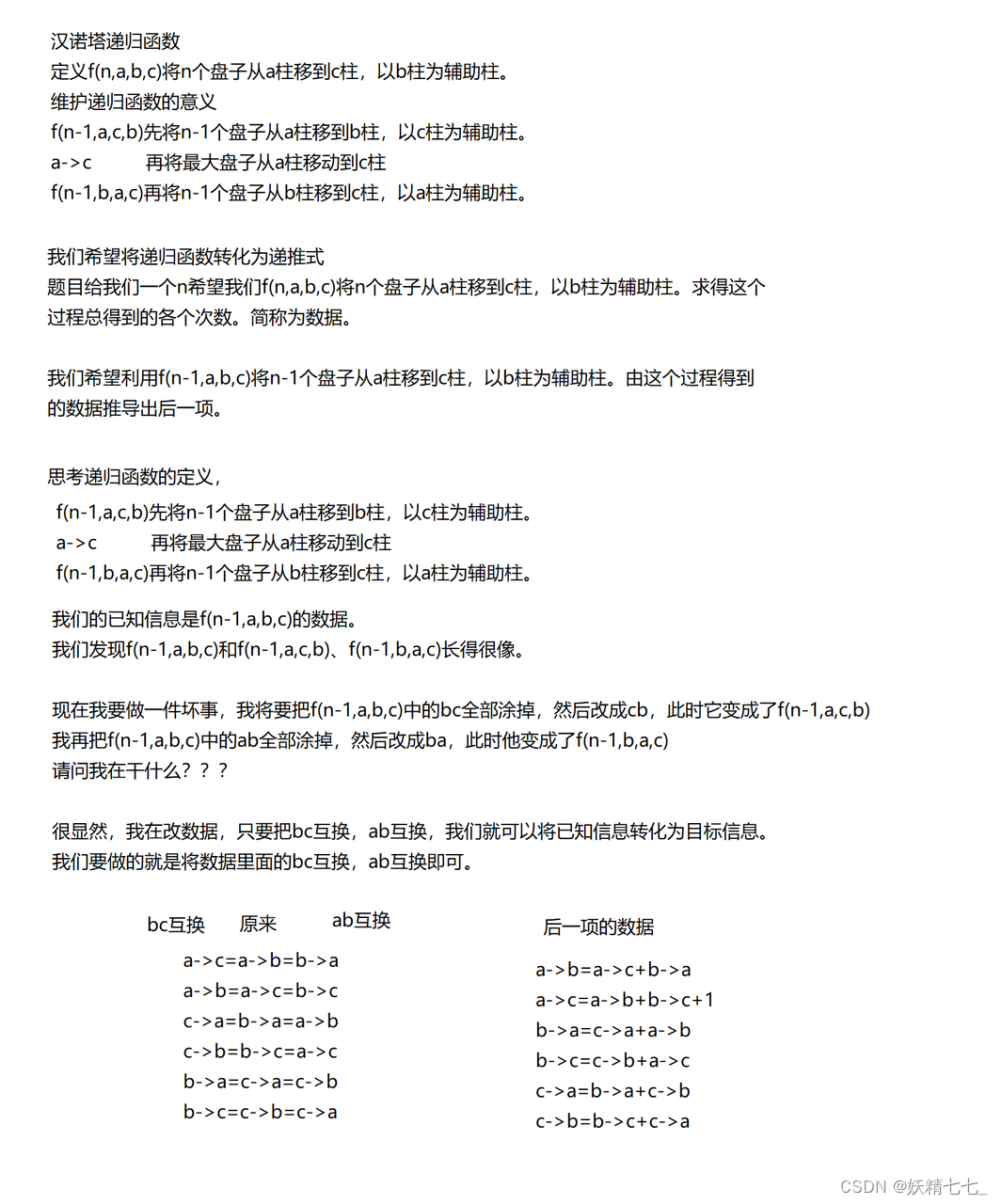
【二十三】【算法分析与设计】三柱汉诺塔详解,计算子移动次数,正常递归计算,观察数据得出数学规律,递归图得出数学规律,将递归函数转化为递推式
目录 汉诺塔递归 汉诺塔子移动次数的计算 牛牛的汉诺塔 选择正常的递归模拟计算子移动次数 根据具体数据得出数学规律 根据递归图得出数学规律 将递归函数转化为递推式 结尾 汉诺塔递归 汉诺塔是一个经典问题,相传在古印度圣庙中,有一种被称为汉…...

C# WPF编程-XAML
C# WPF编程-XAML XAML简述XAML子集XAML编译XAML基础XAML名称空间XAML中的属性和事件属性事件使用其他名称空间中的类型 加载和编译XAML XAML简述 XAML(Extensible Application Markup Language的简写,发音"zammel")是用于实例化.NET对象的标记语言。XAML…...
java 高级面试题(借鉴)(下)
雪花算法原理 第1位符号位固定为0,41位时间戳,10位workId,12位序列号,位数可以有不同实现。 优点:每个毫秒值包含的ID值很多,不够可以变动位数来增加,性能佳(依赖workId的实现…...

C++测试代码
C测试代码 目录 基于C实现的AOP功能 基于C实现的AOP功能 #include <iostream> #include <string>struct LogHeader {std::string prefix;std::string aspect; };template <typename T> void before(const std::string& msg, const LogHeader& heade…...

Flask python 开发篇:蓝图的使用
蓝图 引言一、为什么使用蓝图?二、蓝图的概念三、创建蓝图四、注册蓝图五、分享我的creat_app方法六、写在最后 引言 falsk是个轻量级的框架,核心实现简单,但同事可以让开发人员自由的扩展功能。开发中,使用模块导入的方式。 一…...

告别道路预测老套路:用ParkPredict+模型思路,解决停车场里的‘鬼探头’难题
破解泊车场景预测困局:ParkPredict模型的技术革新与实践停车场里的每一次转向、倒车和避让,都是对自动驾驶系统预测能力的极限挑战。与开放道路的规则明确不同,这里没有清晰的车道线指引,没有统一的行驶方向,只有随时可…...

2026 西安 AI 问答曝光搭建技术解析:GEO 知识图谱 + 深度测评
随着大语言模型技术的快速普及,AI 搜索已经成为用户获取企业信息、商家服务的核心入口。根据中国互联网信息中心 2026 年发布的《中国人工智能搜索发展报告》显示,2025 年国内 AI 搜索用户规模突破 8.2 亿,日均搜索请求超过 20 亿次ÿ…...

QMCDecode终极指南:3步解锁QQ音乐加密格式,实现跨平台音乐自由
QMCDecode终极指南:3步解锁QQ音乐加密格式,实现跨平台音乐自由 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目…...

航空航天为什么离不开高强镁合金?国产替代到哪一步了
飞机每减重一千克,全年大约节省四千两百美元的燃油费用——这是航空工程师熟悉的经验值。在商业航空领域,这个数字还只是财务账;在战斗机、导弹和卫星的世界里,减重的收益被换算成更远的航程、更大的载荷、更高的机动性࿰…...

0.2毫秒快速启动的操作系统
在工业控制以及航空航天等核心场景,极速启动就是高可靠系统的生命线。0.2毫秒超快启动搭配硬件看门狗,让设备在掉电重启、异常恢复时瞬时归位,关键任务永不延误! https://www.bilibili.com/video/BV11mLY6VERt/?spm_id_from333.1…...

百度文心一言开发者如何通过Taotoken低成本接入多模型API
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 百度文心一言开发者如何通过Taotoken低成本接入多模型API 对于已经熟悉并正在使用百度文心一言等国产大模型API的开发者而言&#…...

Spring Security OAuth2 /oauth/token 401原因与Content-Type规范
1. 问题现场还原:一个看似简单却让开发停摆两小时的/oauth/token请求刚接手一个老项目做安全加固,第一件事就是验证OAuth2密码模式的token获取流程。我照着文档写了一条curl命令:curl -X POST http://localhost:8080/oauth/token回车执行&…...

AI算法工程师如何进行模型部署?这2个工具+3个技巧,快速上线
对于软件测试从业者来说,模型部署并不是一个陌生的概念——随着AI功能逐渐渗透到各类应用软件中,测试工程师不仅需要验证模型输出的准确性,更需要理解部署流程对模型稳定性、响应速度和结果一致性的影响。很多测试同学会有这样的困惑…...

Facebook登录协议逆向解析:appsecret_proof与e2e加密机制
1. 这不是“爬虫教程”,而是一次对现代Web身份协议的解剖实验你有没有试过,在调试一个Facebook登录集成时,浏览器Network面板里突然冒出一串带sig、access_token、e2e、c_user的请求,参数长度动辄上千字符,加密方式五花…...

泰拉瑞亚地图编辑器:从像素画布到创意世界的蜕变之旅
泰拉瑞亚地图编辑器:从像素画布到创意世界的蜕变之旅 【免费下载链接】Terraria-Map-Editor TEdit - Terraria Map Editor - TEdit is a stand alone, open source map editor for Terraria. It lets you edit maps just like (almost) paint! It also lets you cha…...