教程3_图像的轮廓
目录
目标
1. 特征矩
2、轮廓质心
3. 轮廓面积
4. 轮廓周长
5. 轮廓近似
6. 轮廓凸包
7. 边界矩形
7.1.直角矩形
7.2. 旋转矩形
8. 最小闭合圈
9. 拟合一个椭圆
10. 拟合直线
目标
在本文中,我们将学习 - 如何找到轮廓的不同特征,例如面积,周长,质心,边界框等。 - 您将看到大量与轮廓有关的功能。
1. 特征矩
特征矩可以帮助您计算一些特征,例如物体的质心,物体的面积等。请查看特征矩上的维基百科页面。函数 cv.moments() 提供了所有计算出的矩值的字典。见下文:
import numpy as np
import cv2 as cv
img = cv.imread('star.jpg',0)
ret,thresh = cv.threshold(img,127,255,0)
contours,hierarchy = cv.findContours(thresh, 1, 2)
cnt = contours[0]
M = cv.moments(cnt)
print( M )从这一刻起,您可以提取有用的数据,例如面积,质心等。
2、轮廓质心
质心由关系给出,cx=M10/M00 和 cy=M01/M00。可以按照以下步骤进行,第一个示例为简单的检测单个轮廓,第二个示例能检测图片中的多个轮廓。
import numpy as np
import cv2 as cvimg = cv.imread('star.jpg',0)ret,thresh = cv.threshold(img,127,255,0)contours,hierarchy = cv.findContours(thresh, 1, 2)cnt = contours[0]M = cv.moments(cnt)
print( M )cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])print('轮廓的质心坐标为:(%d,%d) '%cx %cy)import cv2
import numpy as np # 读取图像
image = cv2.imread('7.jpg') # 转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 应用阈值来获取二值图像
_, thresholded = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 查找轮廓
contours, _ = cv2.findContours(thresholded, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) # 遍历每个轮廓
for contour in contours: # 计算轮廓的矩 M = cv2.moments(contour) # 检查矩是否存在(轮廓不为空) if M["m00"] != 0: # 计算质心 cX = int(M["m10"] / M["m00"]) cY = int(M["m01"] / M["m00"]) # 在图像上绘制质心 cv2.circle(image, (cX, cY), 5, (255, 0, 0), -1) cv2.putText(image, "centroid", (cX - 25, cY - 25), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 0, 0), 2) # 显示结果图像
cv2.imshow('Image with Centroids', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
3. 轮廓面积
轮廓区域由函数 cv.contourArea() 或从矩 M['m00'] 中给出。
import numpy as np
import cv2 as cvimg = cv.imread('star.jpg',0)ret,thresh = cv.threshold(img,127,255,0)contours,hierarchy = cv.findContours(thresh, 1, 2)cnt = contours[0]M = cv.moments(cnt)
print( M )area = cv.contourArea(cnt) 4. 轮廓周长
也称为弧长。可以使用 cv.arcLength() 函数找到它。第二个参数指定形状是闭合轮廓(True)还是曲线。
import numpy as np
import cv2 as cvimg = cv.imread('star.jpg',0)ret,thresh = cv.threshold(img,127,255,0)contours,hierarchy = cv.findContours(thresh, 1, 2)cnt = contours[0]M = cv.moments(cnt)
print( M )perimeter = cv.arcLength(cnt,True)5. 轮廓近似
根据我们指定的精度,它可以将轮廓形状近似为顶点数量较少的其他形状。它是Douglas-Peucker算法的实现。检查维基百科页面上的算法和演示。
为了理解这一点,假设您试图在图像中找到一个正方形,但是由于图像中的某些问题,您没有得到一个完美的正方形,而是一个“坏形状”(如下图所示)。现在,您可以使用此功能来近似形状。在这种情况下,第二个参数称为epsilon,它是从轮廓到近似轮廓的最大距离。它是一个精度参数。需要正确选择epsilon才能获得正确的输出。
import numpy as np
import cv2 as cvimg = cv.imread('star.jpg',0)ret,thresh = cv.threshold(img,127,255,0)contours,hierarchy = cv.findContours(thresh, 1, 2)cnt = contours[0]M = cv.moments(cnt)
print( M )epsilon = 0.1*cv.arcLength(cnt,True)
approx = cv.approxPolyDP(cnt,epsilon,True)
在第二张图片中,绿线显示了ε=弧长的10%时的近似曲线。第三幅图显示了ε=弧长度的1%时的情况。第三个参数指定曲线是否闭合。
6. 轮廓凸包
凸包外观看起来与轮廓逼近相似,但不相似(在某些情况下两者可能提供相同的结果)。在这里,cv.convexHull()函数检查曲线是否存在凸凹缺陷并对其进行校正。一般而言,凸曲线是始终凸出或至少平坦的曲线。如果在内部凸出,则称为凸度缺陷。例如,检查下面的手的图像。红线显示手的凸包。双向箭头标记显示凸度缺陷,这是凸包与轮廓线之间的局部最大偏差。

import numpy as np
import cv2 as cvimg = cv.imread('star.jpg',0)ret,thresh = cv.threshold(img,127,255,0)contours,hierarchy = cv.findContours(thresh, 1, 2)cnt = contours[0]M = cv.moments(cnt)
print( M )hull = cv.convexHull(cnt) 但是,如果要查找凸度缺陷,则需要传递returnPoints = False。为了理解它,我们将拍摄上面的矩形图像。首先,我发现它的轮廓为cnt。现在,我发现它的带有returnPoints = True的凸包,得到以下值:[[[234 202]],[[51 202]],[[51 79]],[[234 79]]],它们是四个角 矩形的点。现在,如果对returnPoints = False执行相同的操作,则会得到以下结果:[[129],[67],[0],[142]]。这些是轮廓中相应点的索引。例如,检查第一个值:cnt [129] = [[234,202]]与第一个结果相同(对于其他结果依此类推)。
7. 边界矩形
有两种类型的边界矩形。
7.1.直角矩形
它是一个矩形,不考虑物体的旋转。所以边界矩形的面积不是最小的。它是由函数cv.boundingRect()找到的。
令(x,y)为矩形的左上角坐标,而(w,h)为矩形的宽度和高度。
import numpy as np
import cv2 as cvimg = cv.imread('star.jpg',0)ret,thresh = cv.threshold(img,127,255,0)contours,hierarchy = cv.findContours(thresh, 1, 2)cnt = contours[0]M = cv.moments(cnt)
print( M )x,y,w,h = cv.boundingRect(cnt)
cv.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)7.2. 旋转矩形
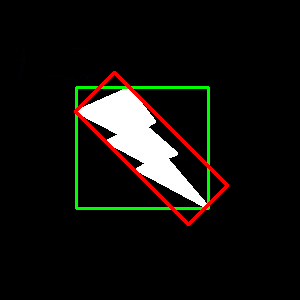
这里,边界矩形是用最小面积绘制的,所以它也考虑了旋转。使用函数是 cv.minAreaRect()。它返回一个Box2D结构,其中包含以下细节 -(中心(x,y),(宽度,高度),旋转角度)。但要画出这个矩形,我们需要矩形的四个角。它由函数 cv.boxPoints() 获得:
import numpy as np
import cv2 as cvimg = cv.imread('star.jpg',0)ret,thresh = cv.threshold(img,127,255,0)contours,hierarchy = cv.findContours(thresh, 1, 2)cnt = contours[0]M = cv.moments(cnt)
print( M )rect = cv.minAreaRect(cnt)
box = cv.boxPoints(rect)
box = np.int0(box)
cv.drawContours(img,[box],0,(0,0,255),2)两个矩形都显示在一张单独的图像中。绿色矩形显示正常的边界矩形。红色矩形是旋转后的矩形。
8. 最小闭合圈
接下来,使用函数 cv.minEnclosingCircle() 查找对象的圆周。它是一个以最小面积完全覆盖物体的圆。
import numpy as np
import cv2 as cvimg = cv.imread('star.jpg',0)ret,thresh = cv.threshold(img,127,255,0)contours,hierarchy = cv.findContours(thresh, 1, 2)cnt = contours[0]M = cv.moments(cnt)
print( M )(x,y),radius = cv.minEnclosingCircle(cnt)
center = (int(x),int(y))
radius = int(radius)
cv.circle(img,center,radius,(0,255,0),2) 
9. 拟合一个椭圆
下一个是把一个椭圆拟合到一个物体上。它返回内接椭圆的旋转矩形。
import numpy as np
import cv2 as cvimg = cv.imread('star.jpg',0)ret,thresh = cv.threshold(img,127,255,0)contours,hierarchy = cv.findContours(thresh, 1, 2)cnt = contours[0]M = cv.moments(cnt)
print( M )ellipse = cv.fitEllipse(cnt)
cv.ellipse(img,ellipse,(0,255,0),2) 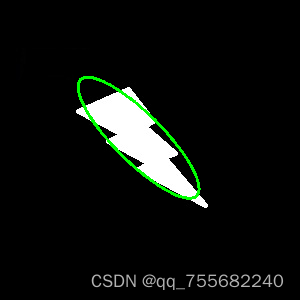
10. 拟合直线
同样,我们可以将一条直线拟合到一组点。下图包含一组白点。我们可以近似一条直线。
import numpy as np
import cv2 as cvimg = cv.imread('star.jpg',0)ret,thresh = cv.threshold(img,127,255,0)contours,hierarchy = cv.findContours(thresh, 1, 2)cnt = contours[0]M = cv.moments(cnt)
print( M )rows,cols = img.shape[:2]
[vx,vy,x,y] = cv.fitLine(cnt, cv.DIST_L2,0,0.01,0.01)
lefty = int((-x*vy/vx) + y)
righty = int(((cols-x)*vy/vx)+y)
cv.line(img,(cols-1,righty),(0,lefty),(0,255,0),2)12. 长宽比
它是对象边界矩形的宽度与高度的比值。
x,y,w,h = cv.boundingRect(cnt)
aspect_ratio = float(w)/h
12. 范围
范围是轮廓区域与边界矩形区域的比值。

area = cv.contourArea(cnt)
x,y,w,h = cv.boundingRect(cnt)
rect_area = w*h
extent = float(area)/rect_area
13. 坚实度
坚实度是等高线面积与其凸包面积之比。
area = cv.contourArea(cnt)
hull = cv.convexHull(cnt)
hull_area = cv.contourArea(hull)
solidity = float(area)/hull_area
14. 等效直径
等效直径是面积与轮廓面积相同的圆的直径。
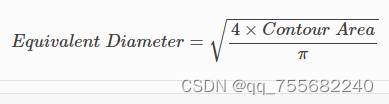
area = cv.contourArea(cnt)
equi_diameter = np.sqrt(4*area/np.pi)
15. 取向
取向是物体指向的角度。以下方法还给出了主轴和副轴的长度。
(x,y),(MA,ma),angle = cv.fitEllipse(cnt)
16. 掩码和像素点
在某些情况下,我们可能需要构成该对象的所有点。可以按照以下步骤完成:
mask = np.zeros(imgray.shape,np.uint8)
cv.drawContours(mask,[cnt],0,255,-1)
pixelpoints = np.transpose(np.nonzero(mask))
#pixelpoints = cv.findNonZero(mask)
这里提供了两个方法,一个使用Numpy函数,另一个使用OpenCV函数(最后的注释行)。结果也是一样的,只是略有不同。Numpy给出的坐标是(行、列)格式,而OpenCV给出的坐标是(x,y)格式。所以基本上答案是可以互换的。注意,row = x, column = y。
17. 最大值,最小值和它们的位置
我们可以使用掩码图像找到这些参数。
min_val, max_val, min_loc, max_loc = cv.minMaxLoc(imgray,mask = mask)
18. 平均颜色或平均强度
在这里,我们可以找到对象的平均颜色。或者可以是灰度模式下物体的平均强度。我们再次使用相同的掩码进行此操作。
mean_val = cv.mean(im,mask = mask)
19. 极端点
极点是指对象的最顶部,最底部,最右侧和最左侧的点。
leftmost = tuple(cnt[cnt[:,:,0].argmin()][0])
rightmost = tuple(cnt[cnt[:,:,0].argmax()][0])
topmost = tuple(cnt[cnt[:,:,1].argmin()][0])
bottommost = tuple(cnt[cnt[:,:,1].argmax()][0])
例如,如果我将其应用于印度地图,则会得到以下结果:

相关文章:
教程3_图像的轮廓
目录 目标 1. 特征矩 2、轮廓质心 3. 轮廓面积 4. 轮廓周长 5. 轮廓近似 6. 轮廓凸包 7. 边界矩形 7.1.直角矩形 7.2. 旋转矩形 8. 最小闭合圈 9. 拟合一个椭圆 10. 拟合直线 目标 在本文中,我们将学习 - 如何找到轮廓的不同特征,例如面积&…...
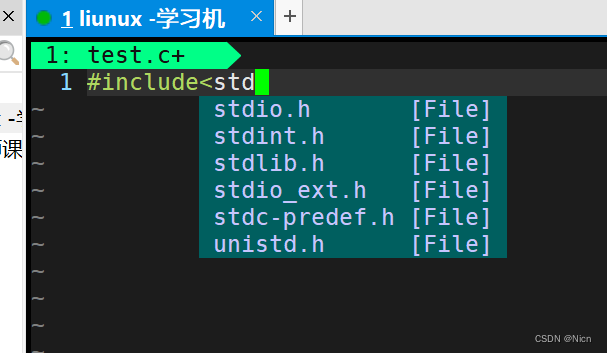
【Linux】-Linux下的编辑器Vim的模式命令大全及其自主配置方法
目录 1.简单了解vim 2.vim的模式 2.1命令模式 2.2插入模式 2.3底行模式 3.vim各模式下的命令集 3.1正常(命令模式下) 3.1.1光标定位命令 3.1.2 复制粘贴 3.1.3 删除 3.1.4 撤销 3.1.5大小写转换 3.1.6替换 「R」:替换光标所到之处的字符&…...

基于SpringBoot和Vue的车辆管理系统的设计与实现
今天要和大家聊的是一款基于SpringBoot和Vue的车辆管理系统的设计与实现 !!! 有需要的小伙伴可以通过文章末尾名片咨询我哦!!! 💕💕作者:李同学 💕…...
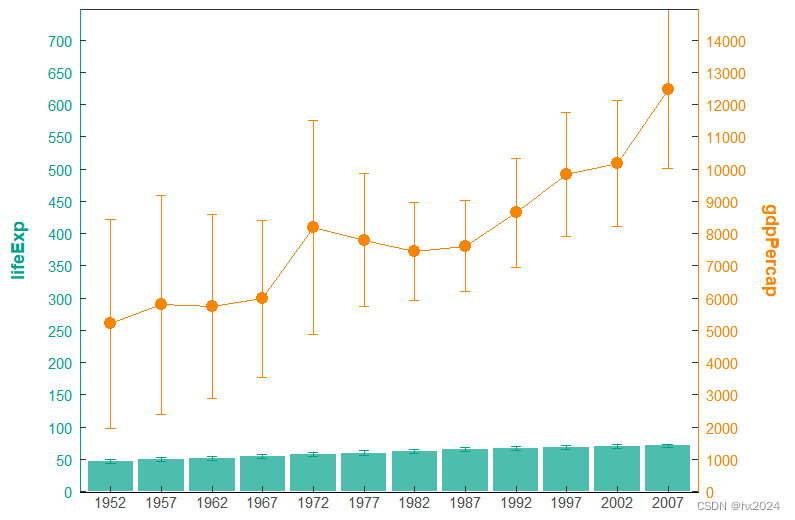
R折线图(自备)
目录 折线图基础 创建散点和折线图 复杂折现加图例 折线图柱状图 数据处理 进行差异检验 基础绘图折线 基础绘图箱线 进行合并 双轴柱状与折线图 数据 折线图基础 创建散点和折线图 rm(list ls()) opar <-par(no.readonlyTRUE)##自带orange数据集 par(mfrowc…...
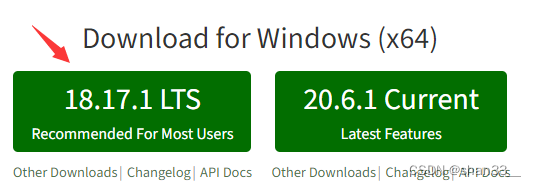
web学习笔记(四十五)Node.js
目录 1. Node.js 1.1 什么是Node.js 1.2 为什么要学node.js 1.3 node.js的使用场景 1.4 Node.js 环境的安装 1.5 如何查看自己安装的node.js的版本 1.6 常用终端命令 2. fs 文件系统模块 2.1引入fs核心模块 2.2 读取指定文件的内容 2.3 向文件写入指定内容 2.4 创…...
基于Gabor滤波器的指纹图像识别,Matlab实现
博主简介: 专注、专一于Matlab图像处理学习、交流,matlab图像代码代做/项目合作可以联系(QQ:3249726188) 个人主页:Matlab_ImagePro-CSDN博客 原则:代码均由本人编写完成,非中介,提供…...

55、Qt/事件机制相关学习20240326
一、代码实现设置闹钟,到时间后语音提醒用户。示意图如下: 代码: #include "widget.h" #include "ui_widget.h"Widget::Widget(QWidget *parent): QWidget(parent), ui(new Ui::Widget), speecher(new QTextToSpeech(t…...

Clip Converter - 视频在线下载方法
Clip Converter - 视频在线下载方法 1. Video URL to Download2. Continue3. StartReferences YT to MP4 & MP3 Converter! https://www.clipconverter.cc/ Clip Converter is a free online media conversion application, which allows you to reocord, convert and do…...
)
【No.19】蓝桥杯简单数论上|模运算|快速幂|GCD|LCM|刷题统计|RSA解密|核桃的数量(C++)
简单数论 模运算 定义:模运算为 a 除以 m 的余数,记为 a mod m,有 a mod m a % m模运算是大数运算中的常用操作。如果一个数太大,无法直接输出,或者不需要直接输出,可以把它取模后,缩小数值再…...

区块链安全之DDoS防护的重要性及其实施策略
随着区块链技术的不断发展和广泛应用,其安全问题也日益凸显。其中,分布式拒绝服务(DDoS)攻击是对区块链网络稳定性和效率构成潜在威胁的重要因素之一。本文旨在深入探讨区块链为何需要采取DDoS高防措施,并提出相应的防护策略。 一、区块链面…...
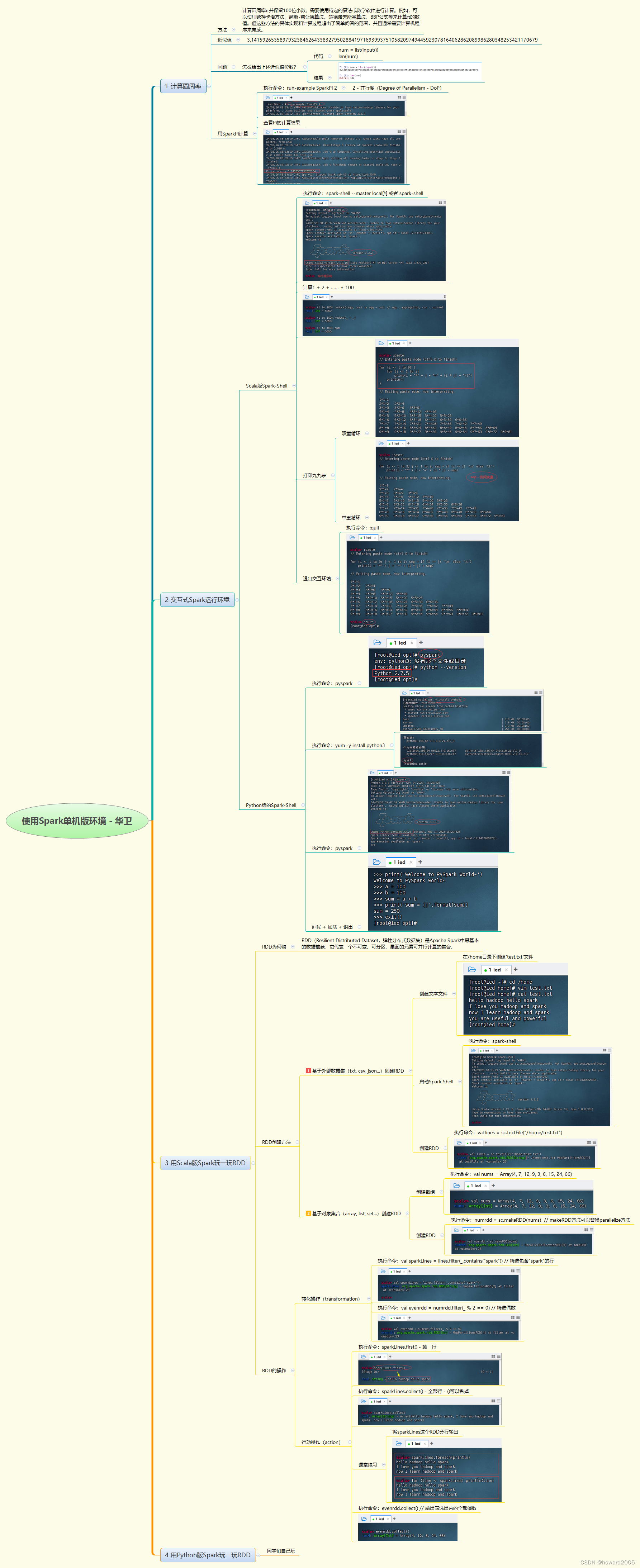
使用Spark单机版环境
在Spark单机版环境中,可通过多种方式进行实战操作。首先,可使用特定算法或数学软件计算圆周率π,并通过SparkPi工具验证结果。其次,在交互式Scala版或Python版Spark Shell中,可以进行简单的计算、打印九九表等操作&…...
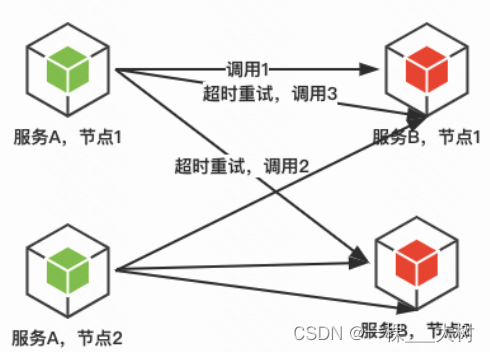
【分布式】——降级熔断限流
降级&熔断&限流 ⭐⭐⭐⭐⭐⭐ Github主页👉https://github.com/A-BigTree 笔记仓库👉https://github.com/A-BigTree/tree-learning-notes 个人主页👉https://www.abigtree.top ⭐⭐⭐⭐⭐⭐ 如果可以,麻烦各位看官顺手点…...
代码随想录刷题笔记 Day 58 | 判断子序列 No.392 | 不同的子序列 No.115
文章目录 Day 5801. 判断子序列(No. 392)<1> 题目<2> 题解<3> 代码 02. 不同的子序列(No. 115)<1> 题目<2> 题解<3> 代码 Day 58 01. 判断子序列(No. 392) 题目链接…...
【C++11】thread线程库
【C11】thread线程库 目录 【C11】thread线程库thread类的简单介绍函数指针lambda表达式常用在线程中 线程函数参数join与detach利用RAII思想来自动回收线程 原子性操作库(atomic)atomic中的load函数:atomic中对变量进行原子操作的一些函数 CAS(Compare-And-Swap)无…...
实例镜像及实例创建方法)
【OpenStack】创建系统(VM)实例镜像及实例创建方法
【OpenStack】创建系统(VM)实例镜像及实例创建方法 目录 【OpenStack】创建系统(VM)实例镜像及实例创建方法创建计算镜像加载基本镜像预建镜像手动实例创建cloud-init 搭救使用 `cloud-init` 配置启动实例连接到您的新实例为实例分配 Floating IP创建SSH隧道结论推荐超级课程:…...

灵途科技助力家电智能创新
从智能家电到个护健康,科技无时无刻不在刷新我们对智慧生活的认知,我们也从未像今天这样近距离贴近智慧生活的朴素本质——传感技术。灵途科技专注光电感知技术,持续为智能家电客户提供成熟的全方位感知解决方案。步入发展第八年,…...

Flask python :logging日志功能使用
logging日志的使用 一、了解flask日志1.1、Loggers记录器1.2、Handlers 处理器1.3、Formatters 格式化器 二、使用日志2.1、官网上的一个简单的示例2.2、基本配置2.3、具体使用示例2.4、运行 三、写在最后 一、了解flask日志 日志是一种非常重要的工具,可以帮助开发…...

ethers.js:sign(签名)
Signers 在ethers中Signer是以太坊账户的抽象,可以用来签名消息和交易,如将签名的交易发送到以太坊网络以执行状态更改的操作。 npm install ethers5.4.0// 引入 import { ethers } from ethers签名 this.provider new ethers.providers.Web3Provider(…...

使用npm i进行admin依赖安装的时候出现问题
提示: npm ERR! code CERT_HAS_EXPIRED npm ERR! errno CERT_HAS_EXPIRED npm ERR! request to https://registry.npm.taobao.org/string-width failed, reason: certificate has expired 切换淘宝源到http或者更换其他国内镜像 npm config set registry http:/…...
)
【Python笔记-FastAPI】定时任务实现(APScheduler)
目录 一、常见触发器 (一) DateTrigger (二) IntervalTrigger (三) CronTrigger (四) CombinationTrigger 二、代码示例 (一) task_scheduler.py (二) client.py 三、调用说明 (一) 注册任务 (二) 查询任务 (三) 删除任务 实现功能: 定时任务注册、修改、删除、查…...

生产环境救急指南:当Navicat连不上时,用MongoDB Shell命令行搞定一切
生产环境救急指南:当Navicat连不上时,用MongoDB Shell命令行搞定一切 凌晨三点,服务器告警突然响起——某个关键服务因数据库查询超时而崩溃。你迅速打开Navicat准备排查,却发现生产环境的安全策略早已屏蔽了所有图形化工具的直接…...

你的EEPROM数据丢了吗?基于STM32和AT24CXX的I2C通信稳定性实战调优指南
EEPROM数据可靠性实战:STM32与AT24CXX的I2C通信深度优化 在工业控制、医疗设备和消费电子等领域,EEPROM作为非易失性存储器承担着关键参数存储的重任。但当系统突然断电或遭遇电磁干扰时,工程师们常会遇到数据丢失、校验失败等棘手问题。本文…...

3分钟学会洛雪音乐音源配置:免费获取全网高品质音乐的终极指南
3分钟学会洛雪音乐音源配置:免费获取全网高品质音乐的终极指南 【免费下载链接】lxmusic- lxmusic(洛雪音乐)全网最新最全音源 项目地址: https://gitcode.com/gh_mirrors/lx/lxmusic- 还在为找不到高质量免费音乐资源而烦恼吗?lxmusic-项目为你提…...

res-downloader终极指南:5分钟掌握全平台资源高效下载秘籍
res-downloader终极指南:5分钟掌握全平台资源高效下载秘籍 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader 想要轻…...

第P5周:Pytorch实现运动鞋识别
🍨 本文为🔗365天深度学习训练营中的学习记录博客🍖 原作者:K同学啊 个人体悟:今天学习了动态学习率有种豁然开朗的感觉,在引入该部分之后模型的学习速度和学习质量都得到了较大提升!...

Ventoy终极指南:一键制作万能启动盘的完整教程
Ventoy终极指南:一键制作万能启动盘的完整教程 【免费下载链接】Ventoy A new bootable USB solution. 项目地址: https://gitcode.com/GitHub_Trending/ve/Ventoy 你是否厌倦了每次安装系统都要重新格式化U盘?Ventoy是一款革命性的开源启动盘制作…...
)
手把手教你用STM32CubeMX和HAL库搞定PAJ7620U2手势传感器(附完整初始化代码)
STM32CubeMX与HAL库实战:PAJ7620U2手势传感器全流程开发指南 当你第一次拿到PAJ7620U2手势传感器模块时,可能会被它强大的功能所吸引——它能识别9种手势动作,包括上下左右滑动、前后推拉、顺时针/逆时针旋转以及挥手动作。但随之而来的问题是…...

小型团队如何利用Taotoken统一管理多模型API成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 小型团队如何利用Taotoken统一管理多模型API成本 对于小型创业团队或项目组而言,同时接入多个大模型服务以获取不同能力…...

OpCore Simplify:黑苹果OpenCore EFI自动化配置的智能解决方案
OpCore Simplify:黑苹果OpenCore EFI自动化配置的智能解决方案 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 在复杂的黑苹果安装过程中&…...

3Dmigoto:如何让破败的立体游戏重获新生?
3Dmigoto:如何让破败的立体游戏重获新生? 【免费下载链接】3Dmigoto DX11 modding wrapper to enable fixing broken stereoscopic effects. Warning: 3Dmigoto[.]com is a phishing site, not us. 项目地址: https://gitcode.com/gh_mirrors/3d/3Dmig…...