Linux VPU驱动
1. 前言
限于作者能力水平,本文可能存在谬误,因此而给读者带来的损失,作者不做任何承诺。
2. 概述
VPU 是用来进行图像、视频数据进行硬件编、解码的硬件模块。内部集成了 Encoder、Decoder 功能部件进行图像、视频数据进行硬件编、解码,以加速处理。
3. VPU 工作原理
3.1 VPU 编码工作流程
---------------| --------- |
输入数据 -->|->| Encoder |->|-> 编码后的输出数据| --------- || || --------- || | Decoder | || --------- |---------------
3.2 VPU解码工作流程
---------------| --------- || | Encoder | || --------- || || --------- |输入数据 -->|->| Decoder |->|-> 解码后的输出数据| --------- |---------------
4. Linux 下的 VPU
4.1 驱动架构
VPU驱动 可基于 V4L2子系统 框架完成。
1. 分别为 Encoder 和 Decoder 各注册1个 /dev/videoX 设备(总共2个video设备)。
/* 注册 Encoder 设备 */
vfd->vfl_dir = VFL_DIR_M2M;
video_register_device(vfd, VFL_TYPE_GRABBER, ...)/* 注册 Decoder 设备 */
vfd->vfl_dir = VFL_DIR_M2M;
video_register_device(vfd, VFL_TYPE_GRABBER, ...)
设备数据传输方向为 VFL_DIR_M2M , 表明设备是设备完成的功能内存间的数据传输拷贝。
2. 在 open() 调用中,在打开文件句柄的私有数据 file_private 绑定设备 buffer 队列(vb2_queue)的类型、接口、IO模式、数据传输方向等。
这里以 Encoder 的 open() 调用为例加以说明:
/* Encoder【输入】数据队列初始化 */
encoder_vq_input.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
encoder_vq_input.io_modes = VB2_MMAP | VB2_USERPTR | VB2_DMABUF;
encoder_vq_input.ops = &xxx_vpu_encoder_qops;
encoder_vq_input.mem_ops = &vb2_dma_contig_memops;
...
vb2_queue_init(&encoder_vq_input);/* Encoder【输出】数据队列初始化 */
encoder_vq_output.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
encoder_vq_output.io_modes = VB2_MMAP | VB2_USERPTR | VB2_DMABUF;
encoder_vq_output.ops = &xxx_vpu_encoder_qops;
encoder_vq_output.mem_ops = &vb2_dma_contig_memops;
...
vb2_queue_init(&encoder_vq_output);...
4.2 用户空间编程框架(Encoder编码示例)
/* 打开设备(/dev/videoX为Encoder设备) */
fd = open("/dev/videoX", O_RDWR);/* 设置输入、输出数据格式 *//* 设置编码【输入】数据格式 */
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
...
ioctl(fd, VIDIOC_S_FMT, &fmt);
/* 设置编码【输出】数据格式 */
fmt.type = V4L2_BUF_TYPE_VIDEO_OUTPUT_MPLANE;
...
ioctl(fd, VIDIOC_S_FMT, &fmt);/* 请求输入、输出buffer,然后映射内核buffer到用户空间(IO模式为 V4l2_MEMORY_MMAP) *//* 请求【输入】buffer并映射到用户空间 */
rb.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
rb.memory = V4l2_MEMORY_MMAP;
rb.count = 1;
ioctl(fd, VIDIOC_REQBUFS, &rb);buf.index = i;
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
buf.memory = V4l2_MEMORY_MMAP;
buf.length = num_input_planes;
buf.m.planes = input_planes;
ioctl(fd, VIDIOC_QUERYBUF, &buf);input_buffer.start = mmap(0, ..., PROT_READ|PROT_WRITE, ...);
input_buffer.length = ...;/* 请求【输出】buffer并映射到用户空间 */
rb.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
rb.memory = V4l2_MEMORY_MMAP;
rb.count = 1;
ioctl(fd, VIDIOC_REQBUFS, &rb);buf.index = i;
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
buf.memory = V4l2_MEMORY_MMAP;
buf.length = num_output_planes;
buf.m.planes = output_planes;
ioctl(fd, VIDIOC_QUERYBUF, &buf);output_buffer.start = mmap(0, ..., PROT_READ|PROT_WRITE, ...);
output_buffer.length = ...;/* 将【输出】buffer入队,然后开启【输出流】 */
buf.index = i;
buf.type = V4L2_BUF_TYPE_VIDEO_OUTPUT_MPLANE;
buf.memory = V4l2_MEMORY_MMAP;
buf.length = num_output_planes;
buf.m.planes = output_planes;
output_planes[i].bytesused = output_planes[i].length;
ioctl(fd, VIDIOC_QBUF, &buf);type = V4L2_BUF_TYPE_VIDEO_OUTPUT_MPLANE;
ioctl(fd, VIDIOC_STREAMON, &type);/* 设置编码输入数据,将【输入】buffer入队,然后开启【输入流】 */
/* 设置编码输入数据 */
memcpy(input_buffer.start, input_data, input_data_size);buf.index = i;
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
buf.memory = V4l2_MEMORY_MMAP;
buf.length = num_input_planes;
buf.m.planes = input_planes;
input_planes[i].bytesused = input_planes[i].length;
ioctl(fd, VIDIOC_QBUF, &buf);type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
ioctl(fd, VIDIOC_STREAMON, &type);/* 出队编码队列(vb2_queue)中就绪的【输出缓冲】 */
(vb2_buffer/v4l2_buffer, vb2_plane/v4l2_plane)
buf.type = V4L2_BUF_TYPE_VIDEO_OUTPUT_MPLANE;
buf.memory = V4L2_MEM_TYPE;
buf.length = num_output_planes;
buf.m.planes = output_planes;
ioctl(fd, VIDIOC_DQBUF, &buf);/* 拷贝编码好的数据到目的缓冲(假定 output plane 数目为1) */
memcpy(output_data, output_buffer.start, buf.m.planes[0].bytesused);/* 关闭设备 */
close(fd);
4.3 VPU 驱动工作流程小结
VPU-----------------------------| ----------------------- || | Encoder | || | ----------------- | |--->|->|->| encoding buffer |->|->|--->^ | | ----------------- | | |输入数据队列(vb2_queue) | | ----------------------- | | 输出数据队列(vb2_queue)----------------------- | | | | -----------------------| vb2_buffer[] |-->| | ----------------------- | |--> | vb2_buffer[] |----------------------- | | | Decoder | | | -----------------------v | | ----------------- | | |--->|->|->| decoding buffer |->|->|--->| | ----------------- | || ----------------------- |-----------------------------
Encoder/Decoder完成编、解码动作后:
(1) 拷贝编、解码后的数据到输出队列中某个vb2_buffer的缓冲: memcpy(output_buffer, input_buffer, size);
(2) 标记输入数据队列中某个vb2_buffer中的数据编、解码完成: vb2_buffer_done(&in_vb, VB2_BUF_STATE_DONE);
(3) 设置输出缓冲负载(输出数据大小): vb2_set_plane_payload(&out_vb, 0, size);
(4) 标记输出数据队列中某个vb2_buffer中的数据编、解码输出数据就绪: vb2_buffer_done(&out_vb, VB2_BUF_STATE_DONE);
4.4 示例
这是一个实际的范例,来自 FrienlyARM 的方案 :NanoPC-T3 Plus 。该方案基于 S5P6818 的 SoC 。
4.4.1 FrienlyARM的方案内核NX VPU驱动补丁
官方自带的VPU驱动编解码的部分有些问题,我对它做了如下修改:
/** drivers/media/platform/nx-vpu/nx_vpu_enc_v4l2.c */
void vpu_enc_get_seq_info(struct nx_vpu_ctx *ctx)
{.../* 注释下面这一段代码 *//*{struct nx_vpu_buf *dst_mb;unsigned long flags;spin_lock_irqsave(&ctx->dev->irqlock, flags);dst_mb = list_entry(ctx->strm_queue.next, struct nx_vpu_buf,list);list_del(&dst_mb->list);ctx->strm_queue_cnt--;vb2_set_plane_payload(&dst_mb->vb, 0, ctx->strm_size);vb2_buffer_done(&dst_mb->vb, VB2_BUF_STATE_DONE);spin_unlock_irqrestore(&ctx->dev->irqlock, flags);}*/
}static void nx_vpu_enc_buf_queue(struct vb2_buffer *vb)
{...if (vq->type == V4L2_BUF_TYPE_VIDEO_OUTPUT_MPLANE) {...} else if (vq->type == V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE) {buf->used = 0;if (ctx->img_fmt.num_planes == 1)NX_DbgMsg(INFO_MSG, "adding to src: %p(%08lx)\n",vb, (unsigned long)nx_vpu_mem_plane_addr(ctx, vb, 0));else if (ctx->img_fmt.num_planes == 2)NX_DbgMsg(INFO_MSG, "adding to src: %p(%08lx, %08lx)\n",vb, (unsigned long)nx_vpu_mem_plane_addr(ctx, vb, 0),(unsigned long)nx_vpu_mem_plane_addr(ctx, vb, 1));else if (ctx->img_fmt.num_planes == 3)NX_DbgMsg(INFO_MSG, "adding to src: %p(%08lx, %08lx, %08lx)\n",vb, (unsigned long)nx_vpu_mem_plane_addr(ctx, vb, 0),(unsigned long)nx_vpu_mem_plane_addr(ctx, vb, 1),(unsigned long)nx_vpu_mem_plane_addr(ctx, vb, 2));}...
}int nx_vpu_enc_open(struct nx_vpu_ctx *ctx)
{...ctx->vq_img.io_modes = VB2_MMAP | VB2_USERPTR | VB2_DMABUF;......ctx->vq_strm.io_modes = VB2_MMAP | VB2_USERPTR | VB2_DMABUF;...
}
/** drivers\media\platform\nx-vpu\nx_vpu_v4l2.c*/
#define DST_QUEUE_OFF_BASE (1 << 30)int vidioc_querybuf(struct file *file, void *priv, struct v4l2_buffer *buf)
{struct nx_vpu_ctx *ctx = fh_to_ctx(file->private_data);int ret = 0;FUNC_IN();...if (buf->type == V4L2_BUF_TYPE_VIDEO_OUTPUT_MPLANE) {...} else if (buf->type == V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE) {...//buf->m.planes[0].m.mem_offset += DST_QUEUE_OFF_BASE;/* Adjust MMAP memory offsets for the CAPTURE queue */if (buf->memory == V4L2_MEMORY_MMAP /*&& !V4L2_TYPE_IS_OUTPUT(ctx->vq_img->type)*/) {if (V4L2_TYPE_IS_MULTIPLANAR(ctx->vq_img.type)) {int i;for (i = 0; i < buf->length; ++i)buf->m.planes[i].m.mem_offset += DST_QUEUE_OFF_BASE;} else {buf->m.offset += DST_QUEUE_OFF_BASE;}}} else {...}return ret;
}
我为 S5P6818 的 VPU 编写了一个测试程序 nxvpu-yuv2jpg.c ,该程序用于将 YUV420 或 GREY 格式数据转换为 MJEPG 格式数据,实现代码见 S5P6818 VPU测试范例代码 。
5. 参考资料
https://wiki.friendlyelec.com/wiki/index.php/NanoPC-T3_Plus/zh
相关文章:

Linux VPU驱动
1. 前言 限于作者能力水平,本文可能存在谬误,因此而给读者带来的损失,作者不做任何承诺。 2. 概述 VPU 是用来进行图像、视频数据进行硬件编、解码的硬件模块。内部集成了 Encoder、Decoder 功能部件进行图像、视频数据进行硬件编、解码&a…...
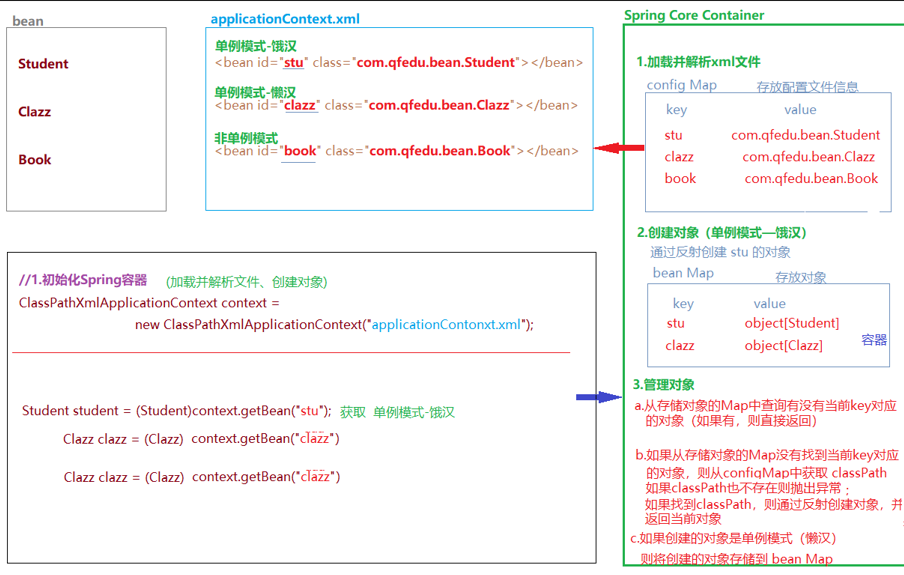
spring 笔记
一、spring概述 1.1 spring介绍 spring是一个轻量级的控制反转和面向切面的容器框架,用来解决企业项目开发的复杂度问题---解耦 轻量级:体积小,对代码没有侵入性控制反转:IOC inverse of control, 把创建对象的工作交…...

Java日志框架学习
首先,Java日志框架可以分为两类:门面型日志框架和记录型日志框架。 门面型日志框架 JCL:Java日志接口,后更名为Commons LoggingSLF4J:是一套简易Java日志门面,本身并无日志的实现 记录型日志框架 JUL&a…...

基础面试题:堆和栈的区别
面试题:堆和栈的区别(往往讲的是内存zha) 为什么说访问栈栈比访问堆快些? 目录 一、数据结构中的堆栈 1、数据结构中的堆 1)堆的定义 2)堆的效率 2、 数据结构中的栈 二、内存中的堆栈 1、内存堆的定义…...
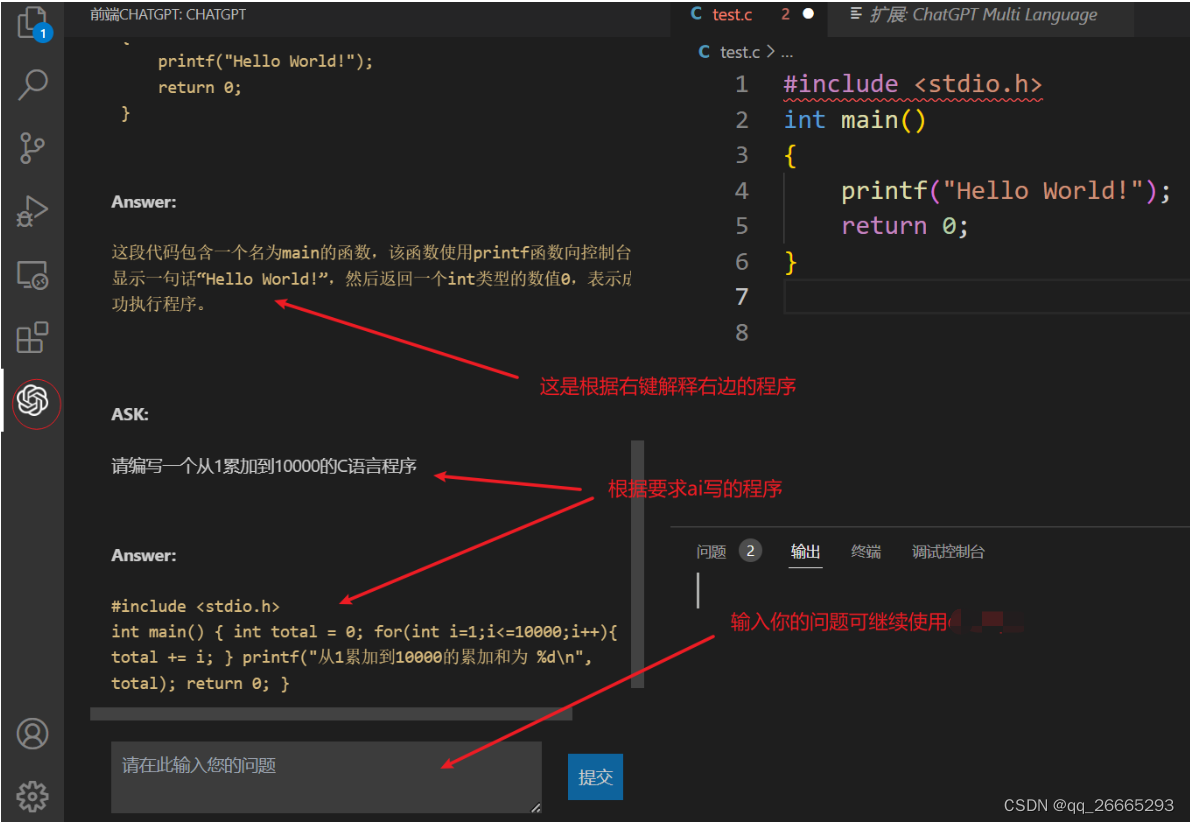
(干货教程)在VSCode并使用chatgtp插件编写CC++语言程序
(干货教程)在VSCode并使用chatgtp插件编写CC语言程序 下载并安装VSCODE 第1步,下载VSCODE https://code.visualstudio.com/Download 第2步,安装VSCODE 安装过程较简单,这里省略。 安装好后效果如图:…...
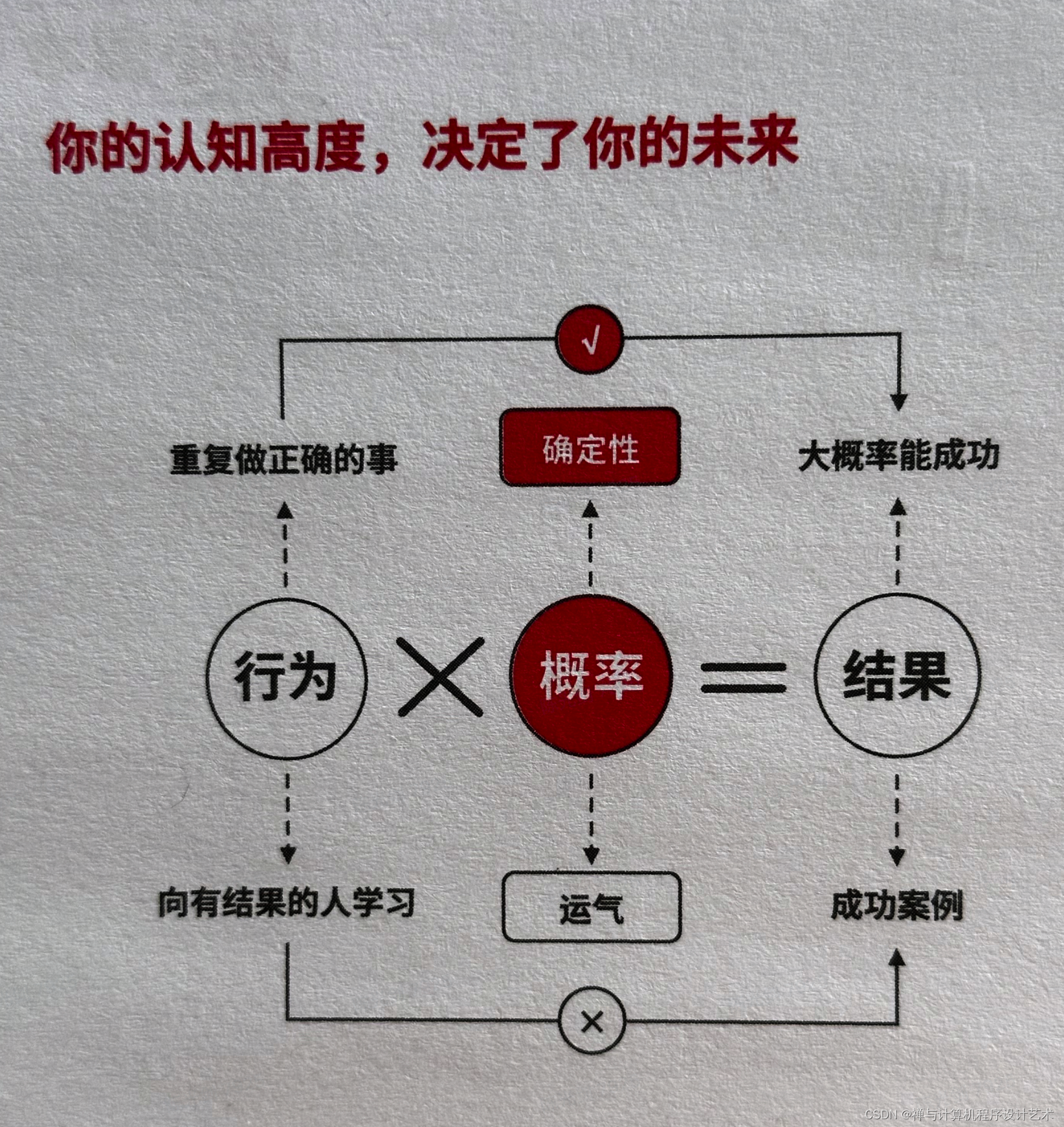
【思维模型】概率思维的价值:找到你的人生算法,实现阶级跃迁!
把同样公平的机会放在放在很多人面前,不同的人生算法,会得到迥然不同的结果。 概率思维是什么? 【ChatGPT】概率思维是一种通过使用数学模型来思考和评估不确定性事件的方法。它通过计算不同可能性的概率来预测事件的结果,并评估风险和机会。 概率思维的价值在于它可以帮…...
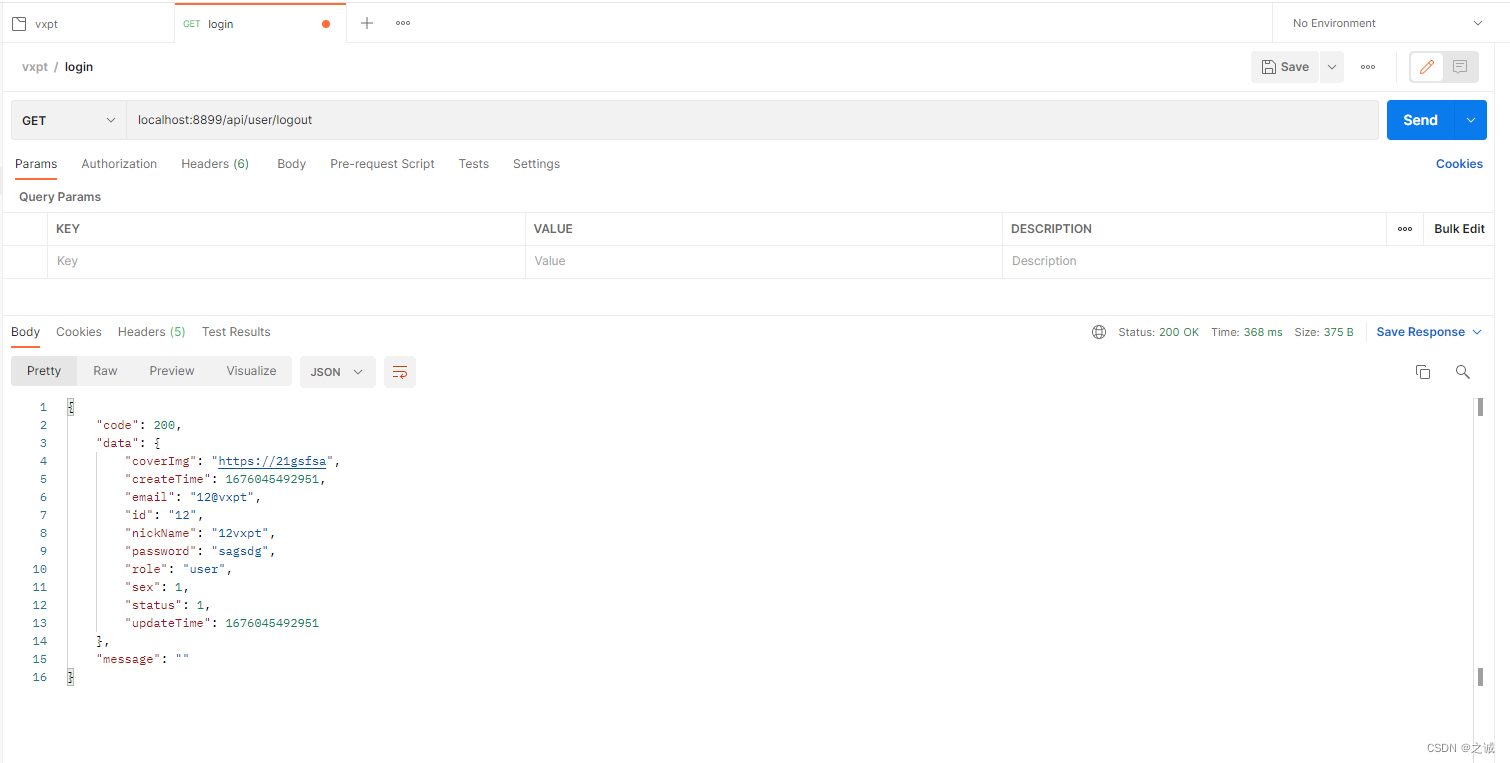
SpringBoot + kotlin/java + Mybatis-Plus +Sqlite + Gradle多模块项目
前言 我自己的业务项目,先用kotlinspringboot 搭建, 发现gradle支持kts脚本,于是我就搭建试试。我就选用了最流行的Sqlite内嵌数据库,虽然H2也不错,但是Sqlite才是最流行的。orm框架我还是选择了Mybatis-Plus ,为此中…...

Docker 容器与容器云读书笔记(一)
最近都没时间看书,闲暇之余看看书,写写笔记,记录一下这难得的时光。 docker容器的出现 2013年初, 一个名字从云计算领域横空出世,并在整个IT行业激起千层浪,这就是Docker。Docker选择容器作为核心和基础&…...
软件设计(九)
软件设计(八)https://blog.csdn.net/ke1ying/article/details/128954569?spm1001.2014.3001.5501 81、模块A将学生信息,即学生姓名、学号、手机等放到一个结构体系中,传递给模块B,模块A和B之间的耦合类型为 什么耦合…...
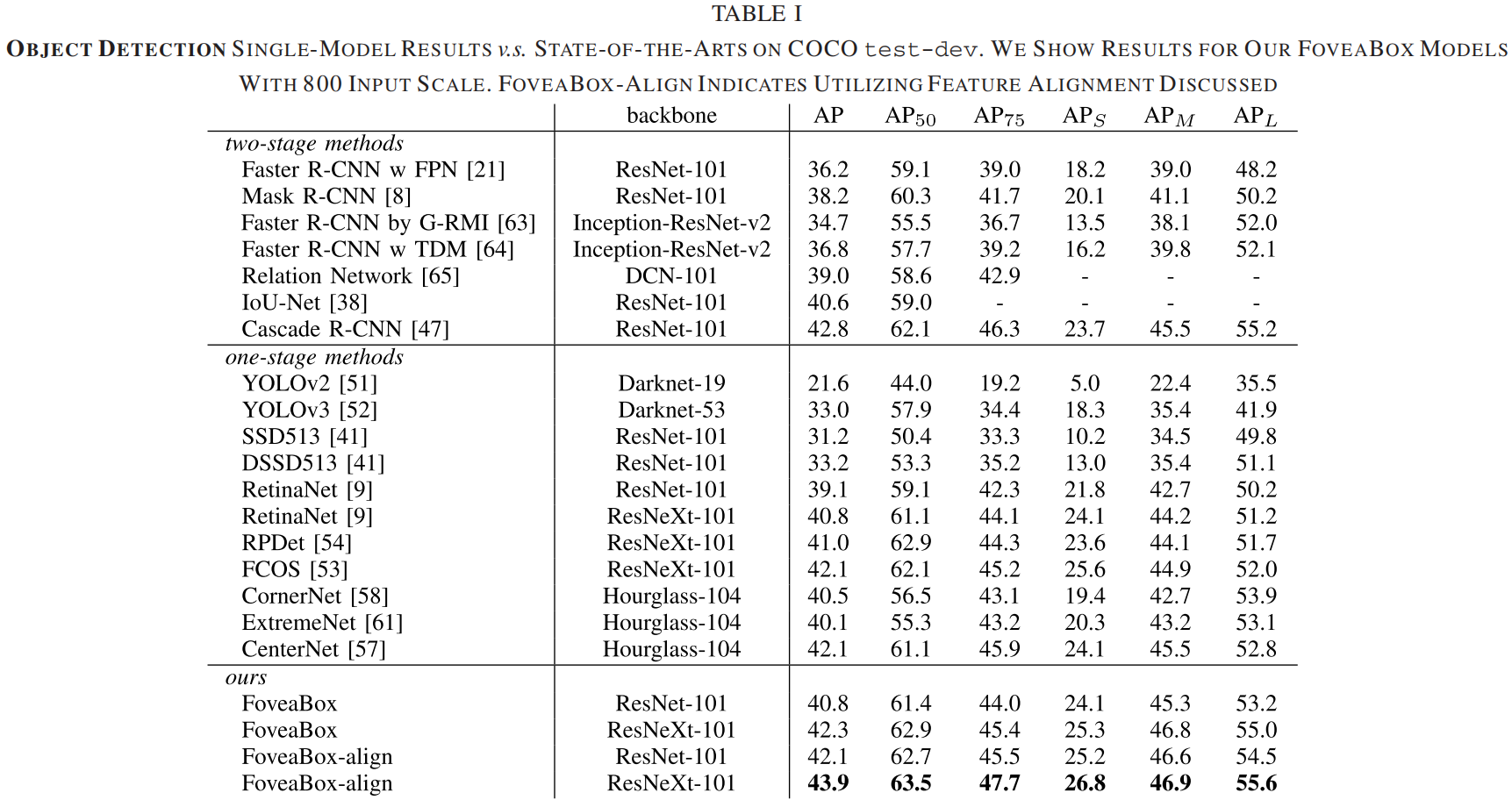
FoveaBox原理与代码解析
paper:FoveaBox: Beyond Anchor-based Object Detectorcode:https://github.com/taokong/FoveaBox背景基于anchor的检测模型需要仔细设计anchor,常用方法之一是根据特定数据集的统计结果确定anchor的number、scale、ratio等,但这种…...
启动BIOS与加载内核)
Linux内核启动(1,0.11版本)启动BIOS与加载内核
从电源到启动BIOS 从我们按下启动电源到BIOS,按下电源–>主板会向电源组发出信号–> 接受到信号后,当主板收到电源正常启动信号后,主板会启动CPU(CPU重置所有寄存器数据,并且初始化数据),比如32位系统ÿ…...

python制作贪吃蛇小游戏,畅玩无限制
前言 大家早好、午好、晚好吖 ❤ ~ 现在这年头,无论玩个什么游戏都有健康机制, 这让我们愉悦玩游戏得步伐变得承重起来, 于是无聊之下我写了个贪吃蛇小游戏,来玩个快乐 代码展示 导入模块 import random import sys import …...
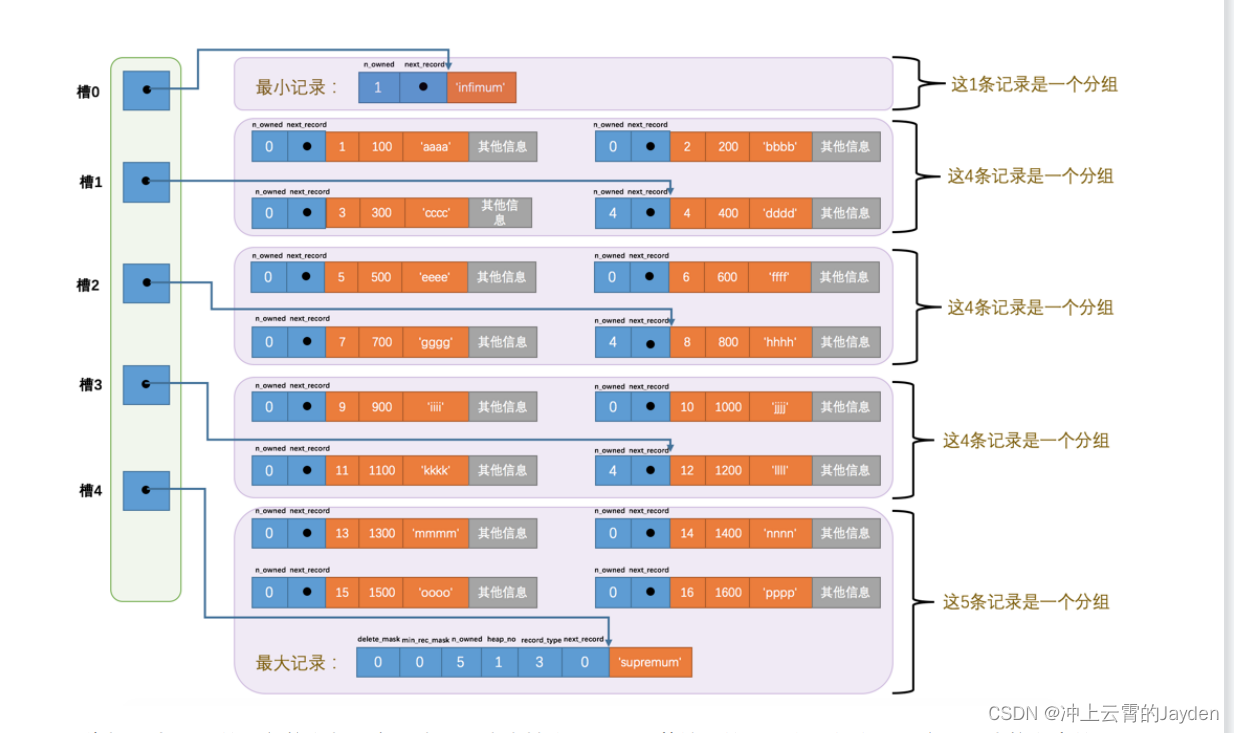
MySQL-InnoDB数据页结构浅析
在MySQL-InnoDB行格式浅析中,们简单提了一下 页 的概念,它是 InnoDB 管理存储空间的基本单位,一个页的大小一般是 16KB 。 InnoDB 为了不同的目的而设计了许多种不同类型的 页: 存放表空间头部信息的页存放 Insert Buffer信息的…...
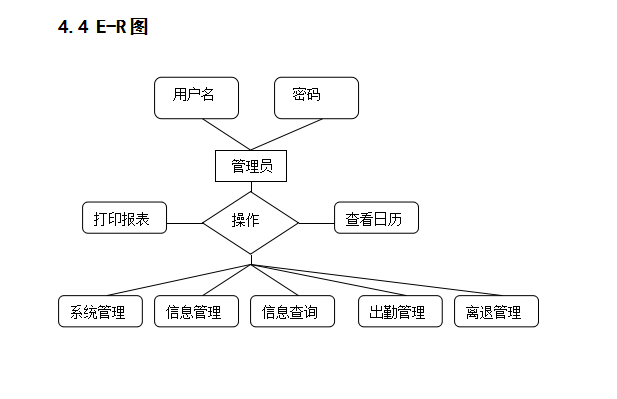
Java、JSP职工人事管理系统设计与实现
技术:Java、JSP等摘要:现在随着我们这个社会的计算机技术的快速发展,计算机在企业管理中得到普遍的应用,现在我们利用计算机在实现企业职工的管理越来越重要。当今社会是快速发展的信息社会,自动化信息的作用也变得越来…...
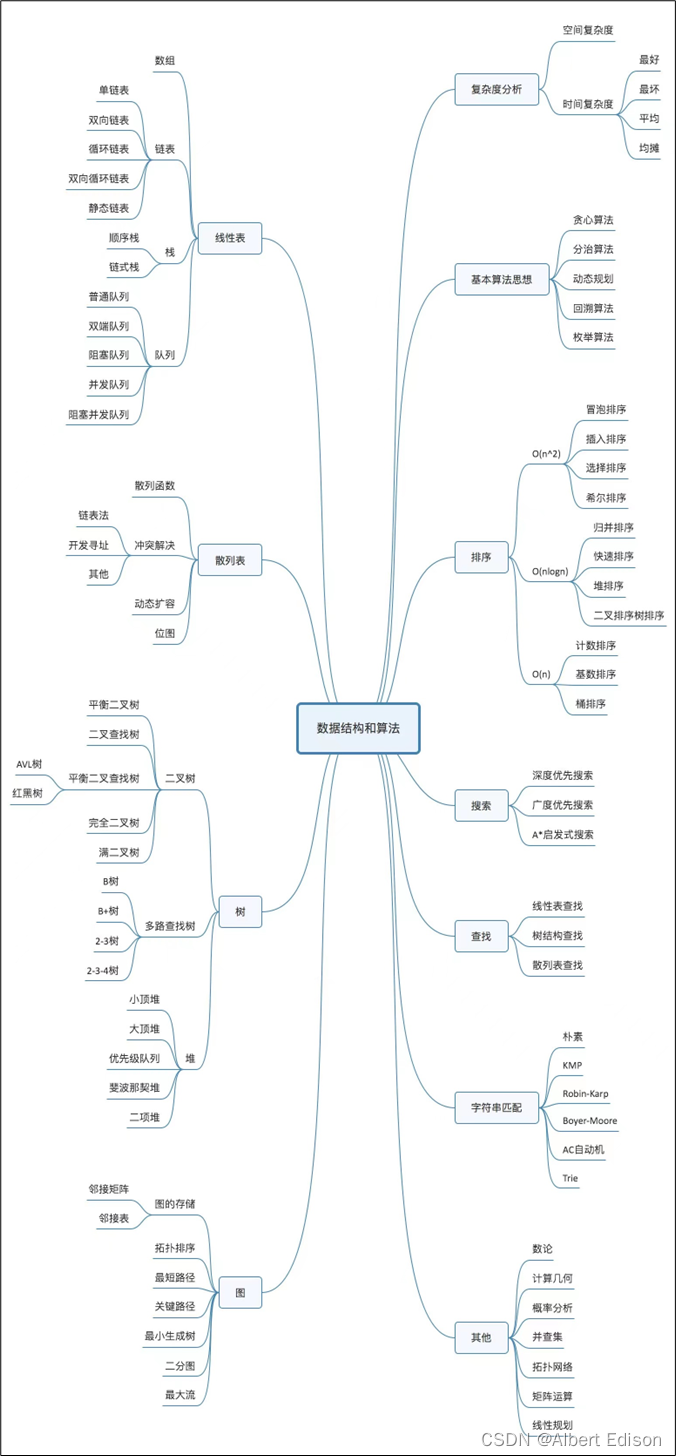
数据结构与算法这么难,为什么我们还要学习?
文章目录前言1. 数据结构与算法是什么?2. 为什么数据结构与算法很难?3. 如何系统学习数据结构与算法?🍑 复杂度🍑 线性表🍑 树形结构🍑 图🍑 排序🍑 字符串🍑…...
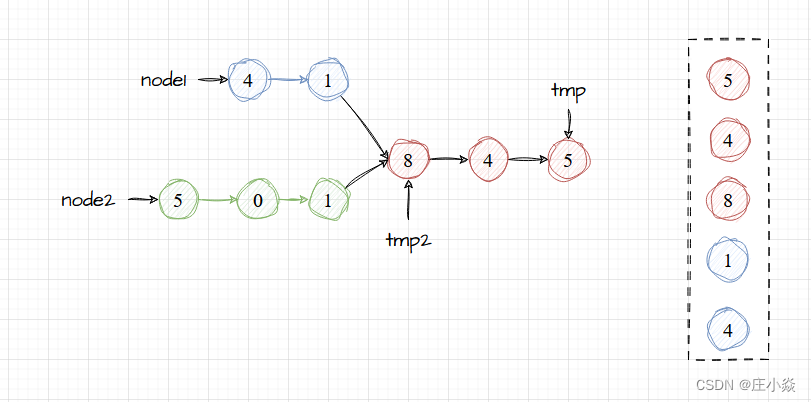
剑指 Offer 52. 两个链表的第一个公共节点
摘要 剑指 Offer 52. 两个链表的第一个公共节点 一、双指针解法 使用双指针的方法,可以将空间复杂度降至 O(1)。只有当链表 headA headB都不为空时,两个链表才可能相交。因此首先判断链表 headA和 headB是否为空,如果其中至少有一个链表为…...
可以写进简历的软件测试电商项目,不进来get一下?
前言 说实话,在找项目的过程中,我下载过(甚至付费下载过)N多个项目、联系过很多项目的作者,但是绝大部分项目,在我看来,并不适合你拿来练习,它们或多或少都存在着“问题”ÿ…...

蓝桥杯-算法-印章问题
这个题真的顶啊!思路:n种图案,m张印章,每一个图案的概率是1/n,这个概率以后用P表示首先我们定义dp[i][j]是买了i张印章(对应于上面的m),凑齐j种图案的概率(对应于上面的n…...

戴尔游匣G16电脑U盘安装系统操作教程分享
戴尔游匣G16电脑U盘安装系统操作教程分享。有用户在使用戴尔游匣G16电脑的时候遇到了系统问题,比如电脑蓝屏、自动关机重启、驱动不兼容等问题。遇到这些问题如果无法进行彻底解决,我们可以通过U盘重新安装系统的方法来解决,因为这些问题一般…...

2023数学建模美赛赛题思路分析 2023美赛 美国大学生数学建模数模
将在本帖更新2023美国大学生数学建模数模美赛各个赛题思路,大家可以点赞收藏! 一、参赛报名 组队参赛(每队人数3人,专业不限)。 二、赛题思路及资料 会在本帖更新思路分析,Q群可领取模型代码/赛题思路资料…...

ClawGuard:为Clawdbot AI智能体打造的安全监控与熔断防护系统
1. 项目概述:ClawGuard 是什么,以及为什么你需要它如果你正在使用或开发基于 Clawdbot 框架的 AI 智能体,那么“安全”和“可控”这两个词,大概率已经在你脑海里盘旋过无数次了。我接触过不少团队,从最初的兴奋于 AI 智…...

告别TwinCAT:手把手教你用LinuxCNC+IGH搭建开源EtherCAT运动控制平台
告别商业软件束缚:LinuxCNCIGH开源运动控制平台实战指南 在工业自动化和运动控制领域,商业软件长期占据主导地位,但高昂的授权费用和封闭的生态系统让许多工程师和创客望而却步。开源运动控制平台的出现打破了这一局面,为追求灵活…...

从一次内部渗透测试说起:我是如何利用SSRF漏洞,通过Gopher协议拿下Redis的
渗透测试实战:SSRF漏洞到Redis未授权访问的完整攻击链剖析 在一次常规的企业内部渗透测试中,我发现了一个看似普通的SSRF漏洞,却意外打开了通往内网核心系统的大门。这个故事不是教科书式的漏洞复现,而是一个真实攻击者视角下的完…...

Taotoken官方价折扣活动对于高频用户的实际成本影响分析
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken官方价折扣活动对于高频用户的实际成本影响分析 1. 理解Taotoken的计费模式 Taotoken平台采用按Token消耗量计费的模式。…...

高海拔环境下的硬件设计挑战与GPS定位故障分析
1. 从数据记录到真实体验:高海拔环境下的技术挑战作为一名电子工程师,我习惯了在实验室里与精密的仪器和数据打交道,一切都在可控范围内。但当你带着自己设计的设备,踏上非洲之巅乞力马扎罗的征途时,现实会给你上一堂生…...

自用便捷图床 API 分享|支持 Token 鉴权、图片上传、删除,稳定可用
在日常写博客、做笔记、开发项目时,经常需要上传图片获取在线链接,支持获取上传凭证、图片上传、图片删除全套接口,开箱即用,下面完整分享接口文档与调用示例。 图床主页:https://imgbeduser.hlytools.top/ 一、整体…...

如何在30秒内获取国家中小学智慧教育平台电子课本:终极解析工具指南
如何在30秒内获取国家中小学智慧教育平台电子课本:终极解析工具指南 【免费下载链接】tchMaterial-parser 国家中小学智慧教育平台 电子课本下载工具,帮助您从智慧教育平台中获取电子课本的 PDF 文件网址并进行下载,让您更方便地获取课本内容…...
)
别再只会点灯了!用51单片机和继电器模块,做个智能插座控制台灯(附完整代码)
从点灯到智能家居:51单片机与继电器模块的实战进阶指南 当你已经能够熟练地用51单片机点亮LED灯时,是否想过将这些基础技能转化为实际生活中的实用工具?本文将带你跨越实验板与真实世界的鸿沟,用最常见的51单片机和继电器模块&…...

对比按量计费与Token Plan套餐,哪种方式更适合你的项目
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比按量计费与Token Plan套餐,哪种方式更适合你的项目 在接入大模型服务时,成本控制是每个开发者和团队都…...

开源物联网平台SiteWhere:微服务架构下的设备管理与数据流实战
1. 项目概述:一个开源的物联网应用平台如果你正在寻找一个能帮你快速搭建、管理和扩展物联网应用的核心平台,而不是从零开始造轮子,那么SiteWhere这个开源项目绝对值得你花时间深入了解。它不是一个简单的设备连接网关,而是一个功…...