OpenCV 如何使用 XML 和 YAML 文件的文件输入和输出
返回:OpenCV系列文章目录(持续更新中......)
上一篇:如何利用OpenCV4.9离散傅里叶变换
下一篇:

目标
本文内容主要介绍:
- 如何使用 YAML 或 XML 文件打印和读取文件和 OpenCV 的文本条目?
- 如何对 OpenCV 数据结构做同样的事情?
- 如何为您的数据结构执行此操作?
- 使用 OpenCV 数据结构,例如 cv::FileStorage , cv::FileNode or cv::FileNodeIterator .
源代码
需要源码的朋友可以前往官网下载:
下面是一个示例代码,说明如何实现目标列表中列举的所有内容。
#include <opencv2/core.hpp>
#include <iostream>
#include <string>
using namespace cv;
using namespace std;
static void help(char** av)
{cout << endl<< av[0] << " shows the usage of the OpenCV serialization functionality." << endl<< "usage: " << endl<< av[0] << " outputfile.yml.gz" << endl<< "The output file may be either XML (xml) or YAML (yml/yaml). You can even compress it by "<< "specifying this in its extension like xml.gz yaml.gz etc... " << endl<< "With FileStorage you can serialize objects in OpenCV by using the << and >> operators" << endl<< "For example: - create a class and have it serialized" << endl<< " - use it to read and write matrices." << endl;
}
class MyData
{
public:MyData() : A(0), X(0), id(){}explicit MyData(int) : A(97), X(CV_PI), id("mydata1234") // explicit to avoid implicit conversion{}void write(FileStorage& fs) const //Write serialization for this class{fs << "{" << "A" << A << "X" << X << "id" << id << "}";}void read(const FileNode& node) //Read serialization for this class{A = (int)node["A"];X = (double)node["X"];id = (string)node["id"];}
public: // Data Membersint A;double X;string id;
};
//These write and read functions must be defined for the serialization in FileStorage to work
static void write(FileStorage& fs, const std::string&, const MyData& x)
{x.write(fs);
}
static void read(const FileNode& node, MyData& x, const MyData& default_value = MyData()){if(node.empty())x = default_value;elsex.read(node);
}
// This function will print our custom class to the console
static ostream& operator<<(ostream& out, const MyData& m)
{out << "{ id = " << m.id << ", ";out << "X = " << m.X << ", ";out << "A = " << m.A << "}";return out;
}
int main(int ac, char** av)
{if (ac != 2){help(av);return 1;} string filename = av[1];{ //writeMat R = Mat_<uchar>::eye(3, 3),T = Mat_<double>::zeros(3, 1);MyData m(1); FileStorage fs(filename, FileStorage::WRITE);// or:// FileStorage fs;// fs.open(filename, FileStorage::WRITE); fs << "iterationNr" << 100;fs << "strings" << "["; // text - string sequencefs << "image1.jpg" << "Awesomeness" << "../data/baboon.jpg";fs << "]"; // close sequence fs << "Mapping"; // text - mappingfs << "{" << "One" << 1;fs << "Two" << 2 << "}"; fs << "R" << R; // cv::Matfs << "T" << T; fs << "MyData" << m; // your own data structures fs.release(); // explicit closecout << "Write Done." << endl;} {//readcout << endl << "Reading: " << endl;FileStorage fs;fs.open(filename, FileStorage::READ); int itNr;//fs["iterationNr"] >> itNr;itNr = (int) fs["iterationNr"];cout << itNr;if (!fs.isOpened()){cerr << "Failed to open " << filename << endl;help(av);return 1;} FileNode n = fs["strings"]; // Read string sequence - Get nodeif (n.type() != FileNode::SEQ){cerr << "strings is not a sequence! FAIL" << endl;return 1;} FileNodeIterator it = n.begin(), it_end = n.end(); // Go through the nodefor (; it != it_end; ++it)cout << (string)*it << endl; n = fs["Mapping"]; // Read mappings from a sequencecout << "Two " << (int)(n["Two"]) << "; ";cout << "One " << (int)(n["One"]) << endl << endl; MyData m;Mat R, T; fs["R"] >> R; // Read cv::Matfs["T"] >> T;fs["MyData"] >> m; // Read your own structure_ cout << endl<< "R = " << R << endl;cout << "T = " << T << endl << endl;cout << "MyData = " << endl << m << endl << endl; //Show default behavior for non existing nodescout << "Attempt to read NonExisting (should initialize the data structure with its default).";fs["NonExisting"] >> m;cout << endl << "NonExisting = " << endl << m << endl;} cout << endl<< "Tip: Open up " << filename << " with a text editor to see the serialized data." << endl; return 0;
}C++Python
from __future__ import print_function
import numpy as np
import cv2 as cv
import sys
def help(filename):print ('''{0} shows the usage of the OpenCV serialization functionality. \n\nusage:\npython3 {0} outputfile.yml.gz\n\nThe output file may be either in XML, YAML or JSON. You can even compress it\nby specifying this in its extension like xml.gz yaml.gz etc... With\nFileStorage you can serialize objects in OpenCV.\n\nFor example: - create a class and have it serialized\n- use it to read and write matrices.\n'''.format(filename))
class MyData:A = 97X = np.piname = 'mydata1234' def __repr__(self):s = '{ name = ' + self.name + ', X = ' + str(self.X)s = s + ', A = ' + str(self.A) + '}'return s def write(self, fs, name):fs.startWriteStruct(name, cv.FileNode_MAP|cv.FileNode_FLOW)fs.write('A', self.A)fs.write('X', self.X)fs.write('name', self.name)fs.endWriteStruct() def read(self, node):if (not node.empty()):self.A = int(node.getNode('A').real())self.X = node.getNode('X').real()self.name = node.getNode('name').string()else:self.A = self.X = 0self.name = ''
def main(argv):if len(argv) != 2:help(argv[0])exit(1) # write R = np.eye(3,3)T = np.zeros((3,1)) m = MyData() filename = argv[1] s = cv.FileStorage(filename, cv.FileStorage_WRITE)# or:# s = cv.FileStorage()# s.open(filename, cv.FileStorage_WRITE) s.write('iterationNr', 100) s.startWriteStruct('strings', cv.FileNode_SEQ)for elem in ['image1.jpg', 'Awesomeness', '../data/baboon.jpg']:s.write('', elem)s.endWriteStruct() s.startWriteStruct('Mapping', cv.FileNode_MAP)s.write('One', 1)s.write('Two', 2)s.endWriteStruct() s.write('R_MAT', R)s.write('T_MAT', T) m.write(s, 'MyData') s.release() print ('Write Done.') # readprint ('\nReading: ')s = cv.FileStorage()s.open(filename, cv.FileStorage_READ) n = s.getNode('iterationNr')itNr = int(n.real()) print (itNr) if (not s.isOpened()):print ('Failed to open ', filename, file=sys.stderr)help(argv[0])exit(1) n = s.getNode('strings')if (not n.isSeq()):print ('strings is not a sequence! FAIL', file=sys.stderr)exit(1) for i in range(n.size()):print (n.at(i).string()) n = s.getNode('Mapping')print ('Two',int(n.getNode('Two').real()),'; ')print ('One',int(n.getNode('One').real()),'\n') R = s.getNode('R_MAT').mat()T = s.getNode('T_MAT').mat() m.read(s.getNode('MyData')) print ('\nR =',R)print ('T =',T,'\n')print ('MyData =','\n',m,'\n') print ('Attempt to read NonExisting (should initialize the data structure','with its default).')m.read(s.getNode('NonExisting'))print ('\nNonExisting =','\n',m) print ('\nTip: Open up',filename,'with a text editor to see the serialized data.')
if __name__ == '__main__':main(sys.argv)解释
这里我们只讨论 XML 和 YAML 文件输入。您的输出(及其各自的输入)文件可能只有这些扩展名之一,并且结构来自此。它们是可以序列化的两种数据结构:映射(如 STL 映射和 Python 字典)和元素序列(如 STL 向量)。它们之间的区别在于,在地图中,每个元素都有一个唯一的名称,您可以通过访问它的内容。对于序列,您需要遍历它们以查询特定项目。
XML/YAML 文件打开和关闭:
在将任何内容写入此类文件之前,您需要打开它,最后关闭它。OpenCV 中的 XML/YAML 数据结构是 cv::FileStorage 。要指定文件绑定到硬盘上的此结构,您可以使用其构造函数或以下函数的 open() 函数:
C++:
FileStorage fs(filename, FileStorage::WRITE);// or:// FileStorage fs;// fs.open(filename, FileStorage::WRITE);Python:
s = cv.FileStorage(filename, cv.FileStorage_WRITE)# or:# s = cv.FileStorage()# s.open(filename, cv.FileStorage_WRITE)您使用的第二个参数中的任何一个都是一个常量,指定您可以对它们执行的操作类型:WRITE、READ 或 APPEND。文件名中指定的扩展名还决定了将使用的输出格式。如果指定扩展名(如 *.xml.gz*),输出甚至可能会被压缩。
当 cv::FileStorage 对象被销毁时,该文件将自动关闭。但是,您可以使用 release 函数显式调用此函数:
C++:
fs.release(); // explicit closePython:
s.release()文本和数字的输入和输出:
在C++中,数据结构使用 STL 库中的<<输出运算符。在 Python 中,改用 cv::FileStorage::write()。要输出任何类型的数据结构,我们首先需要指定其名称。我们只需将它的名称推送到 C++ 中的流即可做到这一点。在 Python 中,写函数的第一个参数是名称。对于基本类型,您可以按照以下值打印:
C++:
fs << "iterationNr" << 100;Python:
s.write('iterationNr', 100)读入是一个简单的寻址(通过 [] 运算符)和强制转换操作,或者通过 >> 运算符读取。在 Python 中,我们使用 getNode() 进行寻址并使用 real()
C++:
int itNr;//fs["iterationNr"] >> itNr;itNr = (int) fs["iterationNr"];Python:
int itNr;//fs["iterationNr"] >> itNr;itNr = (int) fs["iterationNr"];OpenCV 数据结构的输入/输出:
好吧,它们的行为与基本的 C++ 和 Python 类型完全相同:
c++:
Mat R = Mat_<uchar>::eye(3, 3),T = Mat_<double>::zeros(3, 1);fs << "R" << R; // cv::Matfs << "T" << T;fs["R"] >> R; // Read cv::Matfs["T"] >> T;Python:
R = np.eye(3,3)T = np.zeros((3,1))s.write('R_MAT', R)s.write('T_MAT', T)R = s.getNode('R_MAT').mat()T = s.getNode('T_MAT').mat()向量(数组)和关联映射的输入/输出:
如我之前提到的,我们也可以输出映射和序列(数组、向量)。同样,我们首先打印变量的名称,然后我们必须指定我们的输出是序列还是映射。
对于第一个元素之前的序列,请打印“[”字符,在最后一个元素之后打印“]”字符。使用 Python 时,调用 where is 或开始编写结构。调用以完成结构:
FileStorage.startWriteStruct(structure_name, struct_type)struct_typecv2.FileNode_MAPcv2.FileNode_SEQFileStorage.endWriteStruct()
c++:
fs << "strings" << "["; // text - string sequencefs << "image1.jpg" << "Awesomeness" << "../data/baboon.jpg";fs << "]"; // close sequencePython:
s.startWriteStruct('strings', cv.FileNode_SEQ)for elem in ['image1.jpg', 'Awesomeness', '../data/baboon.jpg']:s.write('', elem)s.endWriteStruct()对于映射,键值是相同的,但是现在我们使用“{”和“}”分隔符:
c++:
fs << "Mapping"; // text - mappingfs << "{" << "One" << 1;fs << "Two" << 2 << "}";Python:
s.startWriteStruct('Mapping', cv.FileNode_MAP)s.write('One', 1)s.write('Two', 2)s.endWriteStruct()为了从这些中读取数据,我们使用 cv::FileNode 和 cv::FileNodeIterator 数据结构。cv::FileStorage 类(或 Python 中的 getNode()函数)的 [] 运算符返回 cv::FileNode 数据类型。如果节点是顺序的,则可以使用 cv::FileNodeIterator 循环访问项。在 Python 中,at()函数可用于寻址序列的元素,size()函数返回序列的长度:
c++:
FileNode n = fs["strings"]; // Read string sequence - Get nodeif (n.type() != FileNode::SEQ){cerr << "strings is not a sequence! FAIL" << endl;return 1;} FileNodeIterator it = n.begin(), it_end = n.end(); // Go through the nodefor (; it != it_end; ++it)cout << (string)*it << endl;Python:
n = s.getNode('strings')if (not n.isSeq()):print ('strings is not a sequence! FAIL', file=sys.stderr)exit(1) for i in range(n.size()):print (n.at(i).string())对于映射,您可以再次使用 [] 运算符(Python 中的 at()函数)来访问给定的项目(或 >> 运算符):
c++:
n = fs["Mapping"]; // Read mappings from a sequencecout << "Two " << (int)(n["Two"]) << "; ";cout << "One " << (int)(n["One"]) << endl << endl;Python:
n = s.getNode('Mapping')print ('Two',int(n.getNode('Two').real()),'; ')print ('One',int(n.getNode('One').real()),'\n')读取和写入您自己的数据结构。假设您有一个数据结构,例如:
C++:
class MyData
{
public:MyData() : A(0), X(0), id() {}
public: // Data Membersint A;double X;string id;
};Python:
class MyData:def __init__(self):self.A = self.X = 0self.name = ''在 C++ 中,可以通过 OpenCV I/O XML/YAML 接口(就像 OpenCV 数据结构一样)通过在类内外添加读取和写入函数来序列化它。在 Python 中,您可以通过在类中实现读写函数来接近这一点。对于内部部分:
c++:
void write(FileStorage& fs) const //Write serialization for this class{fs << "{" << "A" << A << "X" << X << "id" << id << "}";}void read(const FileNode& node) //Read serialization for this class{A = (int)node["A"];X = (double)node["X"];id = (string)node["id"];}Python:
def write(self, fs, name):fs.startWriteStruct(name, cv.FileNode_MAP|cv.FileNode_FLOW)fs.write('A', self.A)fs.write('X', self.X)fs.write('name', self.name)fs.endWriteStruct() def read(self, node):if (not node.empty()):self.A = int(node.getNode('A').real())self.X = node.getNode('X').real()self.name = node.getNode('name').string()else:self.A = self.X = 0self.name = ''在 C++ 和python中,需要在类之外添加以下函数定义:
C++:
static void write(FileStorage& fs, const std::string&, const MyData& x)
{x.write(fs);
}
static void read(const FileNode& node, MyData& x, const MyData& default_value = MyData()){if(node.empty())x = default_value;elsex.read(node);
}在这里,您可以观察到,在读取部分中,我们定义了如果用户尝试读取不存在的节点会发生什么。在这种情况下,我们只返回默认的初始化值,但是更详细的解决方案是返回一个对象 ID 的减 1 值。
添加这四个函数后,使用 >> 运算符进行写入,使用 << 运算符进行读取(或为 Python 定义的输入/输出函数):
C++:
MyData m(1);fs << "MyData" << m; // your own data structuresfs["MyData"] >> m; // Read your own structure_Python:
m = MyData()m.write(s, 'MyData')m.read(s.getNode('MyData'))或者尝试阅读不存在的读取:
c++:
cout << "Attempt to read NonExisting (should initialize the data structure with its default).";fs["NonExisting"] >> m;cout << endl << "NonExisting = " << endl << m << endl;Python:
print ('Attempt to read NonExisting (should initialize the data structure','with its default).')m.read(s.getNode('NonExisting'))print ('\nNonExisting =','\n',m)我们可以看到结果:
大多数情况下,我们只是打印出定义的数字。在主机的屏幕上,您可以看到:
Write Done.
Reading:
100image1.jpg
Awesomeness
baboon.jpg
Two 2; One 1
R = [1, 0, 0;0, 1, 0;0, 0, 1]
T = [0; 0; 0]
MyData =
{ id = mydata1234, X = 3.14159, A = 97}Attempt to read NonExisting (should initialize the data structure with its default).
NonExisting =
{ id = , X = 0, A = 0}
Tip: Open up output.xml with a text editor to see the serialized data.在输出 xml 文件中可能看到的内容更有趣:
<?xml version="1.0"?>
<opencv_storage>
<iterationNr>100</iterationNr>
<strings>image1.jpg Awesomeness baboon.jpg</strings>
<Mapping><One>1</One><Two>2</Two></Mapping>
<R type_id="opencv-matrix"><rows>3</rows><cols>3</cols><dt>u</dt><data>1 0 0 0 1 0 0 0 1</data></R>
<T type_id="opencv-matrix"><rows>3</rows><cols>1</cols><dt>d</dt><data>0. 0. 0.</data></T>
<MyData><A>97</A><X>3.1415926535897931e+000</X><id>mydata1234</id></MyData>
</opencv_storage>或者 YAML 文件:
%YAML:1.0
iterationNr: 100
strings:- "image1.jpg"- Awesomeness- "baboon.jpg"
Mapping:One: 1Two: 2
R: !!opencv-matrixrows: 3cols: 3dt: udata: [ 1, 0, 0, 0, 1, 0, 0, 0, 1 ]
T: !!opencv-matrixrows: 3cols: 1dt: ddata: [ 0., 0., 0. ]
MyData:A: 97X: 3.1415926535897931e+000id: mydata1234You may observe a runtime instance of this on the YouTube here .
参考文章:
1、《File Input and Output using XML and YAML files》----Bernát Gábor
相关文章:
OpenCV 如何使用 XML 和 YAML 文件的文件输入和输出
返回:OpenCV系列文章目录(持续更新中......) 上一篇:如何利用OpenCV4.9离散傅里叶变换 下一篇: 目标 本文内容主要介绍: 如何使用 YAML 或 XML 文件打印和读取文件和 OpenCV 的文本条目?如何对 OpenCV …...

playbook的介绍、应用与实施
playbook的介绍、应用与实施 文章目录 playbook的介绍、应用与实施1. 实施playbook1.1 Ansible Playbook与临时命令1.2 格式化Ansible Playbook1.3 运行playbook1.4 提高输出的详细程度1.5 语法验证1.6 执行空运行 2. 实施多个play2.1 缩写多个play2.2 play中的远程用户和特权升…...

uniApp使用XR-Frame创建3D场景(5)材质贴图的运用
上一篇讲解了如何在uniApp中创建xr-frame子组件并创建简单的3D场景。 这篇我们讲解在xr-frame中如何给几何体赋予贴图材质。 先看源码 <xr-scene render-system"alpha:true" bind:ready"handleReady"><xr-node><xr-assets><xr-asse…...
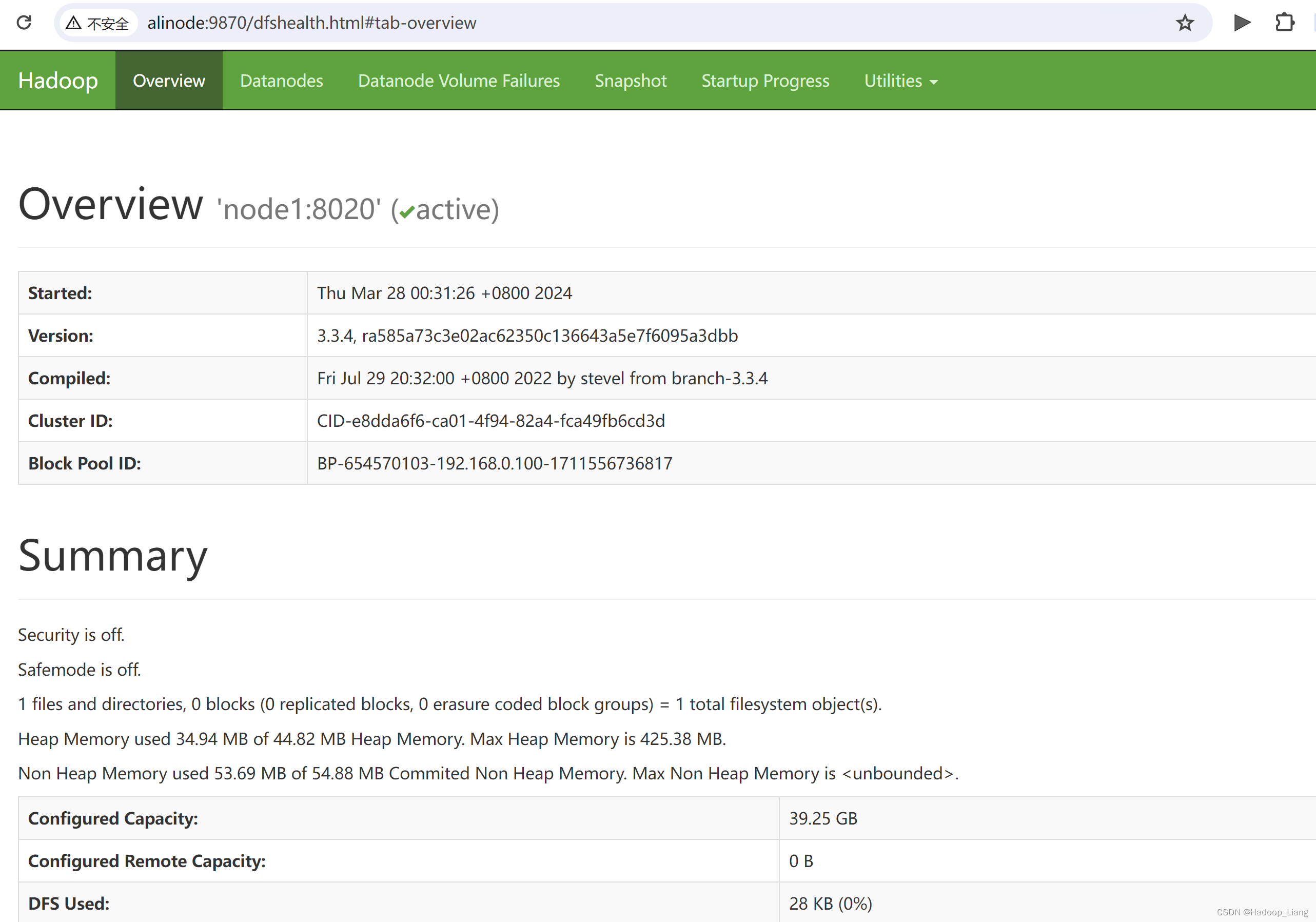
阿里云CentOS7安装Hadoop3伪分布式
ECS准备 开通阿里云ECS 略 控制台设置密码 连接ECS 远程连接工具连接阿里云ECS实例,这里远程连接工具使用xshell 根据提示接受密钥 根据提示写用户名和密码 用户名:root 密码:在控制台设置的密码 修改主机名 将主机名从localhost改为需要…...

78.子集90.子集2
78.子集 思路 又回到了组合的模板中来,这道题相比于前面的题省去了递归终止条件。大差不差。 代码 class Solution {List<List<Integer>> result new ArrayList<>();LinkedList<Integer> listnew LinkedList<>();public List<…...

基于Ubuntu的Linux系统安装jsoncpp开发包过程
执行以下命令: sudo apt update sudo apt install libjsoncpp-dev有可能出现的问题: 1.如果在执行sudo apt update时出现以下信息 Hit:1 http://mirrors.aliyun.com/ubuntu bionic InRelease Hit:2 http://mirrors.aliyun.com/ubuntu bionic-security…...

葵花卫星影像应用场景及数据获取
一、卫星参数 葵花卫星是由中国航天科技集团公司研制的一颗光学遥感卫星,代号CAS-03。该卫星于2016年11月9日成功发射,位于地球同步轨道,轨道高度约为35786公里,倾角为0。卫星设计寿命为5年,搭载了高分辨率光学相机和多…...
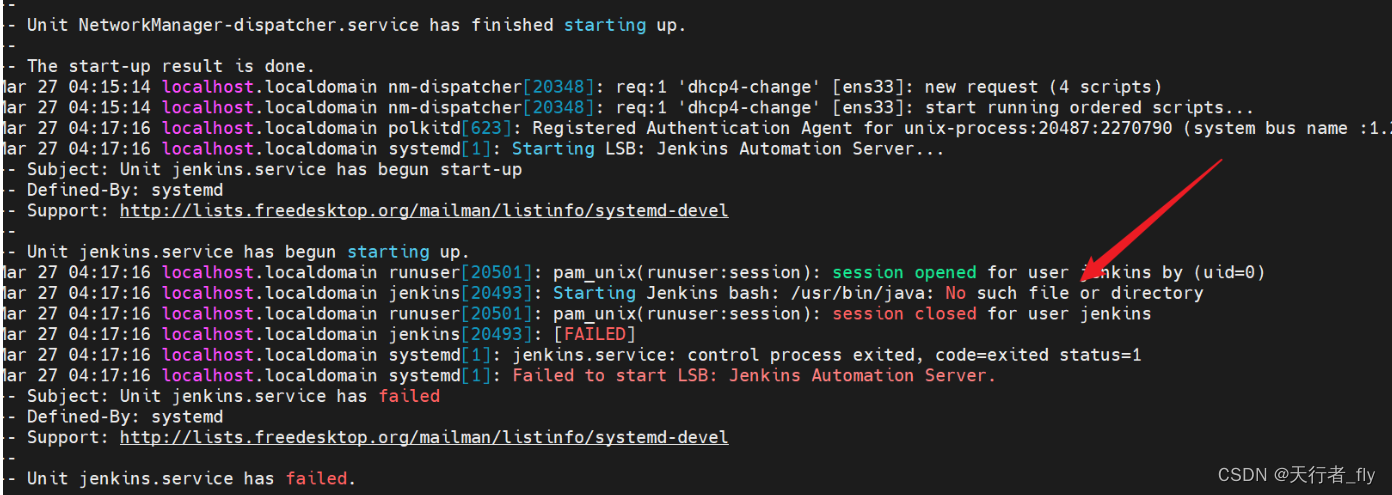
Jenkins升级中的小问题
文章目录 使用固定版本安装根据jenkins页面下载war包升级jenkins重启jenkins报错问题解决 K8s部署过程中的一些小问题 ##### Jenkins版本小插曲 在Jenkins环境进行插件安装时全部清一色飘红,发现是因为Jenkins版本过低导致,报错的位置可以找到更新je…...
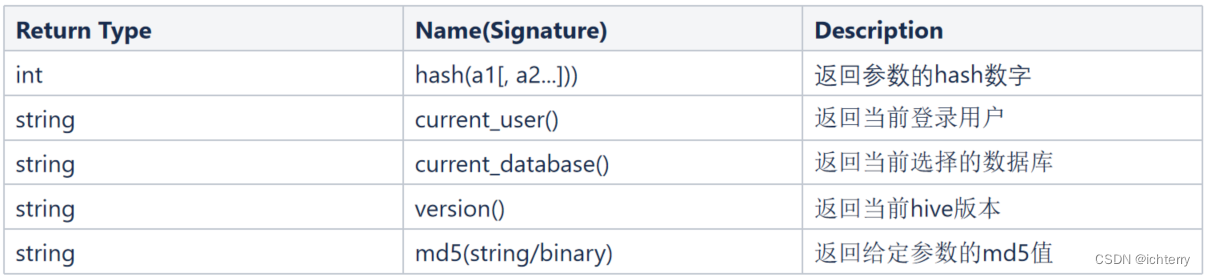
Apache Hive的基本使用语法(二)
Hive SQL操作 7、修改表 表重命名 alter table score4 rename to score5;修改表属性值 # 修改内外表属性 ALTER TABLE table_name SET TBLPROPERTIES("EXTERNAL""TRUE"); # 修改表注释 ALTER TABLE table_name SET TBLPROPERTIES (comment new_commen…...

基于单片机16位智能抢答器设计
**单片机设计介绍,基于单片机16位智能抢答器设计 文章目录 一 概要二、功能设计设计思路 三、 软件设计原理图 五、 程序六、 文章目录 一 概要 基于单片机16位智能抢答器设计是一个结合了单片机技术、显示技术、按键输入技术以及声音提示技术的综合性项目。其设计…...

idea默认代码生成脚本修改
修改了下idea自带的代码生成脚本,增加了脚本代码的注释,生成了controller,service,impl,mapper,里面都是空的,具体可以根据自己的代码习惯增加 代码生成脚本的使用可以看下使用 idea 生成实体类…...
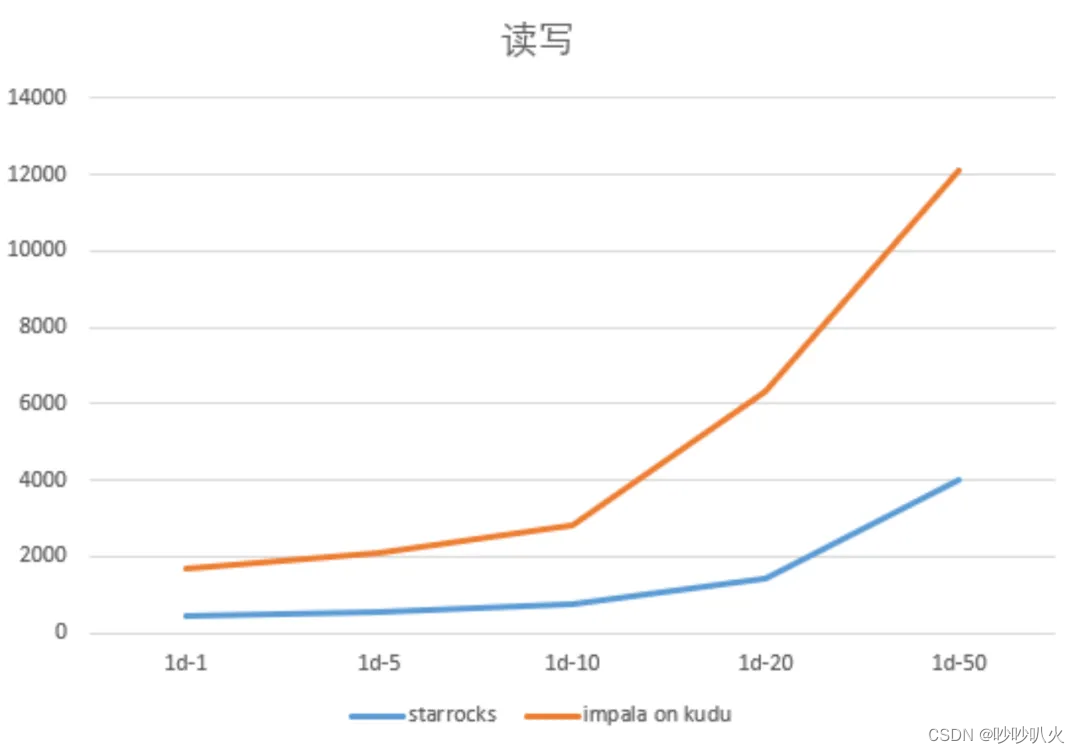
StarRocks实战——多点大数据数仓构建
目录 前言 一、背景介绍 二、原有架构的痛点 2.1 技术成本 2.2 开发成本 2.2.1 离线 T1 更新的分析场景 2.2.2 实时更新分析场景 2.2.3 固定维度分析场景 2.2.4 运维成本 三、选择StarRocks的原因 3.1 引擎收敛 3.2 “大宽表”模型替换 3.3 简化Lambda架构 3.4 模…...

jmeter总结之:Regular Expression Extractor元件
Regular Expression Extractor是一个后处理器元件,使用正则从服务器的响应中提取数据,并将这些数据保存到JMeter变量中,以便在后续的请求或断言中使用。在处理动态数据或验证响应中的特定信息时很有用。 添加Regular Expression Extractor元…...

快速上手Spring Cloud 七:事件驱动架构与Spring Cloud
快速上手Spring Cloud 一:Spring Cloud 简介 快速上手Spring Cloud 二:核心组件解析 快速上手Spring Cloud 三:API网关深入探索与实战应用 快速上手Spring Cloud 四:微服务治理与安全 快速上手Spring Cloud 五:Spring …...

leetcode 1997.访问完所有房间的第一天
思路:动态规划前缀和 这道题还是很难的,因为你如果需要推出状态方程是很难想的。 在题中我们其实可以发现,这里在访问nextVisit数组的过程中,其实就是对于当前访问的房子之前的房子进行了回访。 怎么说呢?比如你现在…...
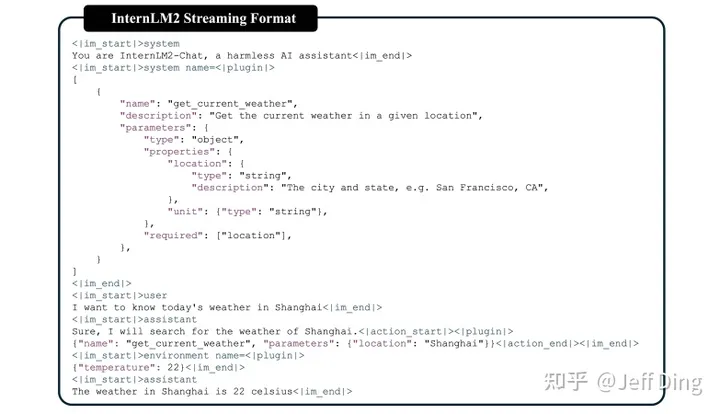
【InternLM 实战营第二期笔记】书生·浦语大模型全链路开源体系及InternLM2技术报告笔记
大模型 大模型成为发展通用人工智能的重要途径 专用模型:针对特定任务,一个模型解决一个问题 通用大模型:一个模型应对多种任务、多种模态 书生浦语大模型开源历程 2023.6.7:InternLM千亿参数语言大模型发布 2023.7.6&#…...
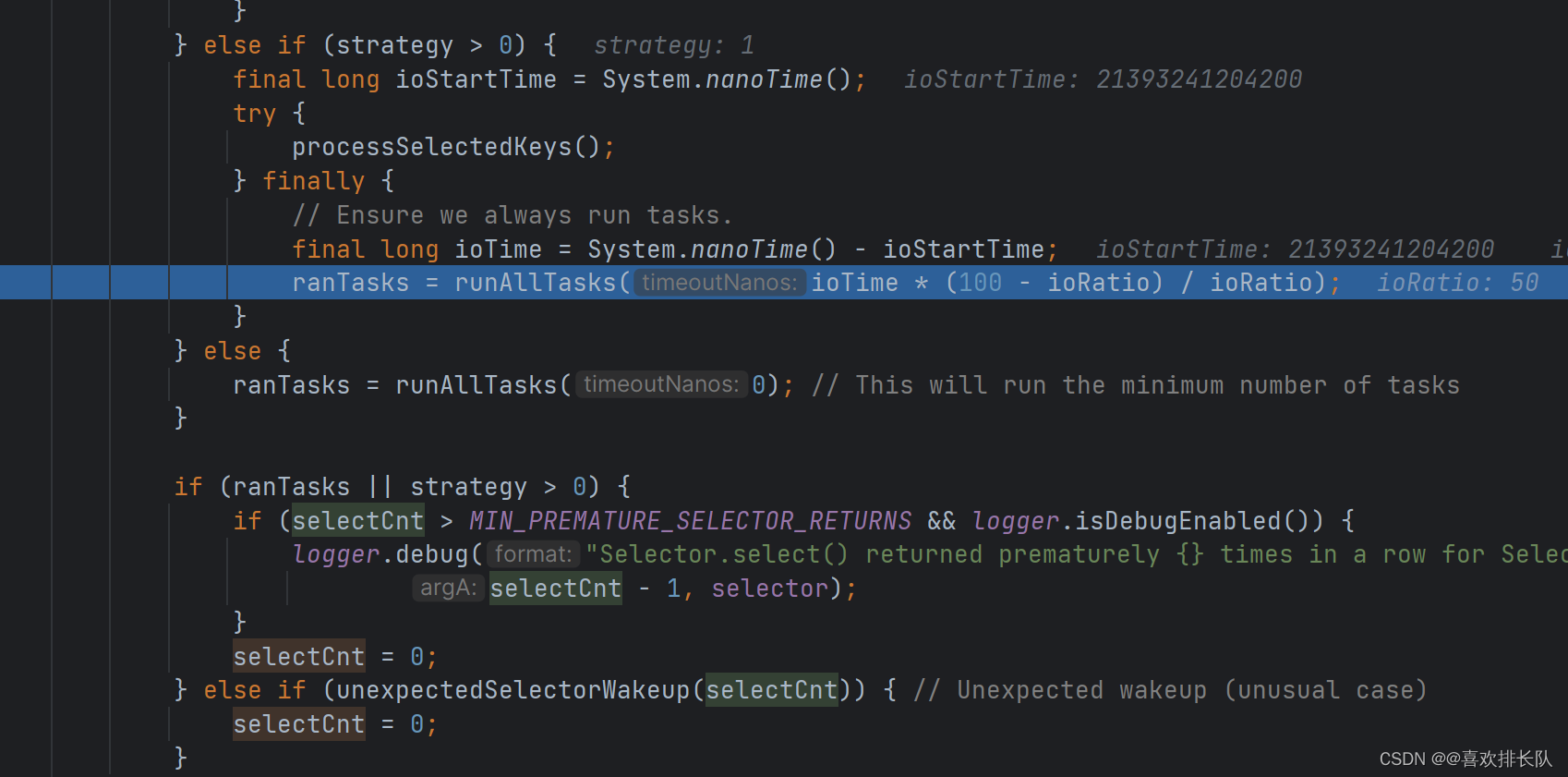
Netty对Channel事件的处理以及空轮询Bug的解决
继续上一篇Netty文章,这篇文章主要分析Netty对Channel事件的处理以及空轮询Bug的解决 当Netty中采用循环处理事件和提交的任务时 由于此时我在客户端建立连接,此时服务端没有提交任何任务 此时select方法让Selector进入无休止的阻塞等待 此时selectCnt进…...

【PostgreSQL】- 1.1 在 Debian 12 上安装 PostgreSQL 15
官方说明参考 (原文 PostgreSQL:Linux 下载 (Debian)) 默认情况下,PostgreSQL 在所有 Debian 版本中都可用。但是, Debians 的稳定版本“快照”了特定版本的 PostgreSQL 然后在该 Debian 版本的…...

第4章.精通标准提示,引领ChatGPT精准输出
标准提示 标准提示,是引导ChatGPT输出的一个简单方法,它提供了一个具体的任务让模型完成。 如果你要生成一篇新闻摘要。你只要发送指示词:汇总这篇新闻 : …… 提示公式:生成[任务] 生成新闻文章的摘要: 任务&#x…...
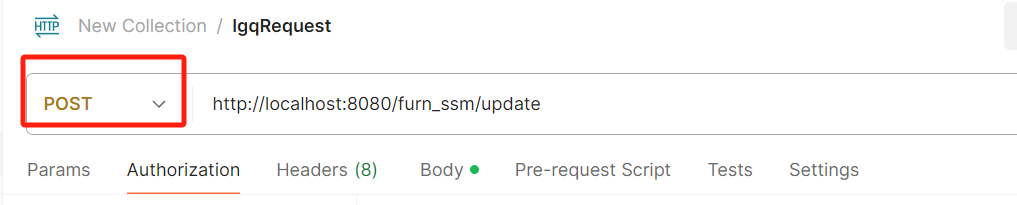
HTTP状态 405 - 方法不允许
方法有问题。 用Post发的请求,然后用Put接收的。 大家也可以看看是不是有这种问题 <body><h1>HTTP状态 405 - 方法不允许</h1><hr class"line" /><p><b>类型</b> 状态报告</p><p><b>消息…...
实战复盘:从外网突破到域控的完整攻击链剖析)
红日靶场(vulnstack)实战复盘:从外网突破到域控的完整攻击链剖析
1. 红日靶场环境搭建与拓扑解析 红日靶场(vulnstack)是国内知名的渗透测试实战平台,模拟了真实企业网络环境中常见的漏洞场景。这个靶场特别适合想要系统学习内网渗透技术的新手,我自己第一次接触时就被它贴近实战的设计惊艳到了。…...

昆仑芯天池256卡超节点上个月点亮,将于6月正式上市
雷递网 乐天 5月13日5月13日,在Create2026百度AI开发者大会上,百度创始人李彦宏首次提出AI时代的“度量衡”——日活智能体数(DAA)。他认为,进入智能体时代,衡量一个平台和生态的繁荣,更应该关注…...

Chrome网页批量替换神器:3分钟掌握高效文本编辑技巧
Chrome网页批量替换神器:3分钟掌握高效文本编辑技巧 【免费下载链接】chrome-extensions-searchReplace 项目地址: https://gitcode.com/gh_mirrors/ch/chrome-extensions-searchReplace 你是否曾为网页上重复的文本修改而烦恼?面对需要批量替换…...

Kubernetes部署MeiliSearch:从概念到生产级实践指南
1. 项目概述:当MeiliSearch遇见Kubernetes 如果你正在寻找一个轻量级、高性能的开源搜索引擎,并且你的应用恰好运行在Kubernetes上,那么 meilisearch/meilisearch-kubernetes 这个项目就是你一直在等的“官方说明书”。简单来说,…...

【信息科学与工程学】计算机科学与自动化——第一百五十一篇 云计算操作系统函数说明02
威胁情报与狩猎模块(361-370) 编号 模块/组件类型 模块中的函数名称和函数的参数列表和函数的实现方式 函数的详细功能和计算机科学的所有性能【含参数列表】和功能说明 关联的其他函数【含上下文关系】 和对应模块【含上下文关系】 关联的软件/硬件核心知识点【需要涵…...

AI智能体编排框架实战:构建具备记忆与协作能力的智能系统
1. 项目概述:当AI智能体需要“记忆”与“协作”在AI智能体开发领域,我们常常面临一个核心挑战:如何让智能体不仅能在单次对话中表现出色,还能记住历史、规划未来,并与其他智能体协同工作?这就像组建一支足球…...
技术:原理、优化与应用)
光学邻近校正(OPC)技术:原理、优化与应用
1. 光学邻近校正技术概述在半导体制造的光刻工艺中,光学邻近效应(Optical Proximity Effect)是影响图案转移精度的主要挑战之一。当特征尺寸缩小到45nm及以下节点时,光衍射和光阻化学反应导致的图案失真变得尤为显著。具体表现为&…...

从FinFET到ESD设计:2013年半导体产业技术演进与工程实践启示
1. 行业动态聚焦:2013年4月,EDA/IP领域的那些关键信号作为一名在芯片设计行业摸爬滚打了十几年的老兵,我习惯每周花点时间翻翻行业新闻,不是为了追热点,而是想从那些看似零散的公告里,嗅出技术演进和产业协…...
)
新手避坑指南:Unity工程里这6个文件夹,一个都别乱动(含ProjectSettings详解)
Unity工程目录安全手册:新手必须掌握的6个核心文件夹管理法则 刚接触Unity开发时,面对工程目录里那些神秘的文件夹,你是否曾犹豫过"这个能删吗?那个能改吗?"——我完全理解这种困惑。三年前接手第一个商业项…...

如何用DownKyi实现B站视频自由:5个实用场景与解决方案
如何用DownKyi实现B站视频自由:5个实用场景与解决方案 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等&#…...