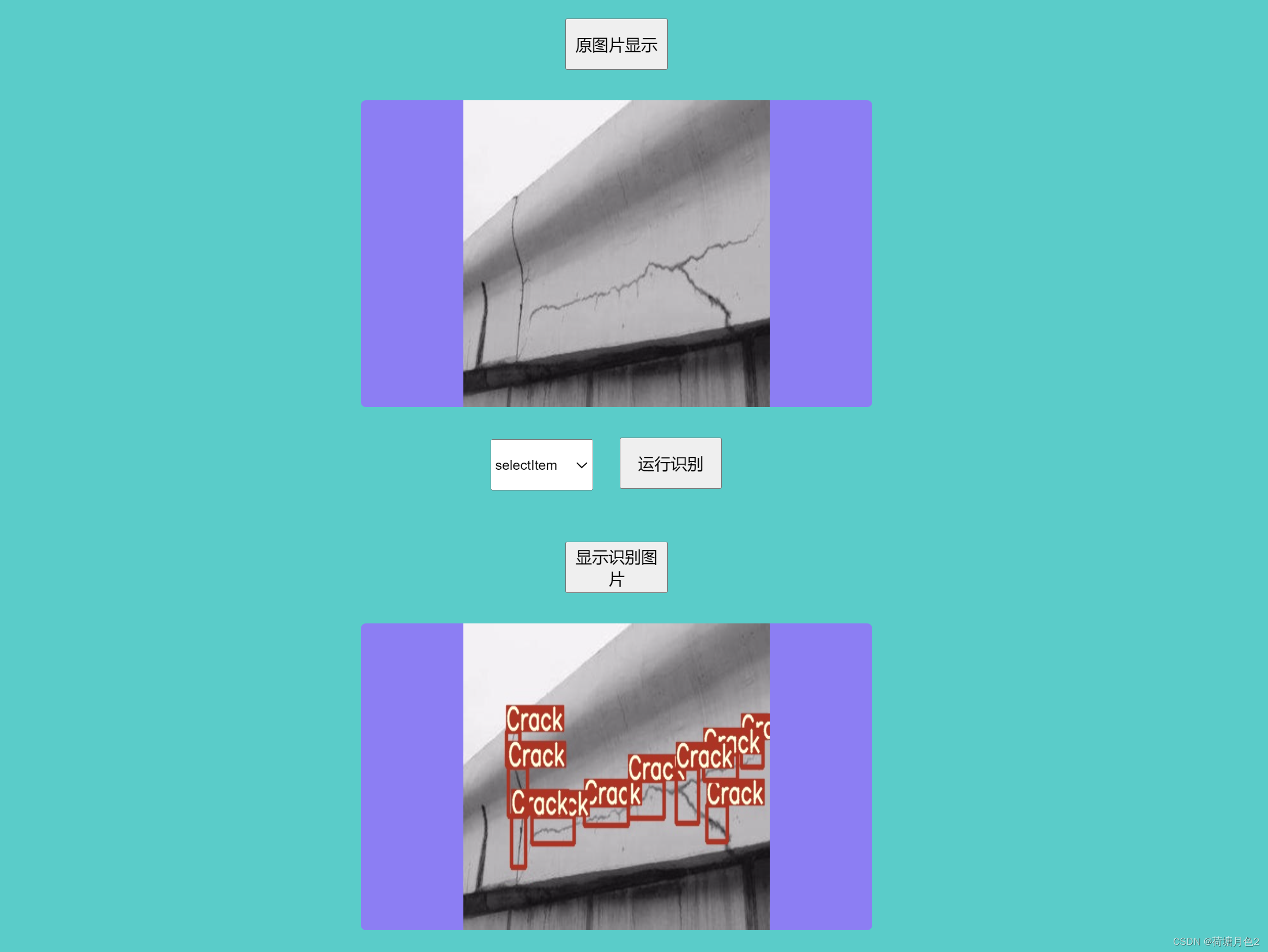
Python+Django+Yolov5路面墙体桥梁裂缝特征检测识别html网页前后端
程序示例精选
Python+Django+Yolov5路面墙体桥梁裂缝特征检测识别html网页前后端
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
前言
这篇博客针对《Python+Django+Yolov5路面墙体桥梁裂缝特征检测识别html网页前后端》编写代码,代码整洁,规则,易读。 学习与应用推荐首选。
运行结果
文章目录
一、所需工具软件
二、使用步骤
1. 主要代码
2. 运行结果
三、在线协助
一、所需工具软件
1. Python
2. Django, Yolov5, Pycharm
二、使用步骤
代码如下(示例):
def detect(save_img=False):source, weights, view_img, save_txt, imgsz = opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_sizewebcam = source.isnumeric() or source.endswith('.txt') or source.lower().startswith(('rtsp://', 'rtmp://', 'http://'))# Directoriessave_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run(save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir# Initializeset_logging()device = select_device(opt.device)half = device.type != 'cpu' # half precision only supported on CUDA# Load modelmodel = attempt_load(weights, map_location=device) # load FP32 modelstride = int(model.stride.max()) # model strideimgsz = check_img_size(imgsz, s=stride) # check img_sizeif half:model.half() # to FP16# Second-stage classifierclassify = Falseif classify:modelc = load_classifier(name='resnet101', n=2) # initializemodelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']).to(device).eval()# Set Dataloadervid_path, vid_writer = None, Noneif webcam:view_img = check_imshow()cudnn.benchmark = True # set True to speed up constant image size inferencedataset = LoadStreams(source, img_size=imgsz, stride=stride)else:save_img = Truedataset = LoadImages(source, img_size=imgsz, stride=stride)# Get names and colorsnames = model.module.names if hasattr(model, 'module') else model.namescolors = [[random.randint(0, 255) for _ in range(3)] for _ in names]# Run inferenceif device.type != 'cpu':model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run oncet0 = time.time()for path, img, im0s, vid_cap in dataset:img = torch.from_numpy(img).to(device)img = img.half() if half else img.float() # uint8 to fp16/32img /= 255.0 # 0 - 255 to 0.0 - 1.0if img.ndimension() == 3:img = img.unsqueeze(0)# Inferencet1 = time_synchronized()pred = model(img, augment=opt.augment)[0]# Apply NMSpred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)t2 = time_synchronized()# Apply Classifierif classify:pred = apply_classifier(pred, modelc, img, im0s)# Process detectionsfor i, det in enumerate(pred): # detections per imageif webcam: # batch_size >= 1p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.countelse:p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)p = Path(p) # to Pathsave_path = str(save_dir / p.name) # img.jpgtxt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # img.txts += '%gx%g ' % img.shape[2:] # print stringgn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwhif len(det):# Rescale boxes from img_size to im0 sizedet[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()# Write resultsfor *xyxy, conf, cls in reversed(det):if save_txt: # Write to filexywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywhline = (cls, *xywh, conf) if opt.save_conf else (cls, *xywh) # label formatwith open(txt_path + '.txt', 'a') as f:f.write(('%g ' * len(line)).rstrip() % line + '\n')if save_img or view_img: # Add bbox to imagelabel = f'{names[int(cls)]} {conf:.2f}'plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=3)# Print time (inference + NMS)print(f'{s}Done. ({t2 - t1:.3f}s)')# Save results (image with detections)if save_img:if dataset.mode == 'image':cv2.imwrite(save_path, im0)else: # 'video'if vid_path != save_path: # new videovid_path = save_pathif isinstance(vid_writer, cv2.VideoWriter):vid_writer.release() # release previous video writerfourcc = 'mp4v' # output video codecfps = vid_cap.get(cv2.CAP_PROP_FPS)w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*fourcc), fps, (w, h))vid_writer.write(im0)if save_txt or save_img:s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''print(f"Results saved to {save_dir}{s}")print(f'Done. ({time.time() - t0:.3f}s)')print(opt)check_requirements()with torch.no_grad():if opt.update: # update all models (to fix SourceChangeWarning)for opt.weights in ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt']:detect()strip_optimizer(opt.weights)else:detect()运行结果
三、在线协助:
如需安装运行环境或远程调试,见文章底部个人 QQ 名片,由专业技术人员远程协助!
{kind=link}
1)远程安装运行环境,代码调试
2)Visual Studio, Qt, C++, Python编程语言入门指导
3)界面美化
4)软件制作
5)云服务器申请
6)网站制作
当前文章连接:https://blog.csdn.net/alicema1111/article/details/132666851
个人博客主页:https://blog.csdn.net/alicema1111?type=blog
博主所有文章点这里:https://blog.csdn.net/alicema1111?type=blog
博主推荐:
Python人脸识别考勤打卡系统:
https://blog.csdn.net/alicema1111/article/details/133434445
Python果树水果识别:https://blog.csdn.net/alicema1111/article/details/130862842
Python+Yolov8+Deepsort入口人流量统计:https://blog.csdn.net/alicema1111/article/details/130454430
Python+Qt人脸识别门禁管理系统:https://blog.csdn.net/alicema1111/article/details/130353433
Python+Qt指纹录入识别考勤系统:https://blog.csdn.net/alicema1111/article/details/129338432
Python Yolov5火焰烟雾识别源码分享:https://blog.csdn.net/alicema1111/article/details/128420453
Python+Yolov8路面桥梁墙体裂缝识别:https://blog.csdn.net/alicema1111/article/details/133434445
相关文章:
Python+Django+Yolov5路面墙体桥梁裂缝特征检测识别html网页前后端
程序示例精选 PythonDjangoYolov5路面墙体桥梁裂缝特征检测识别html网页前后端 如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助! 前言 这篇博客针对《PythonDjangoYolov5路面墙体桥梁裂缝特征检测识别html网页前…...

uniApp使用XR-Frame创建3D场景(7)加入点击交互
上篇文章讲述了如何将XR-Frame作为子组件集成到uniApp中使用 这篇我们讲解如何与场景中的模型交互(点击识别) 先看源码 <xr-scene render-system"alpha:true" bind:ready"handleReady"><xr-node><xr-mesh id"…...

单元测试11213123231313131231231231
使用技术 junit Mockito s[romg 示例代码: SpringBootTest(classes启动类.class) public class AbstractTes{ MockBean protected A a; } AutoConfigureMockMvc(printOnlyOnFailure false) public abstract class AbstractWebTes extends AbstractTes imple…...
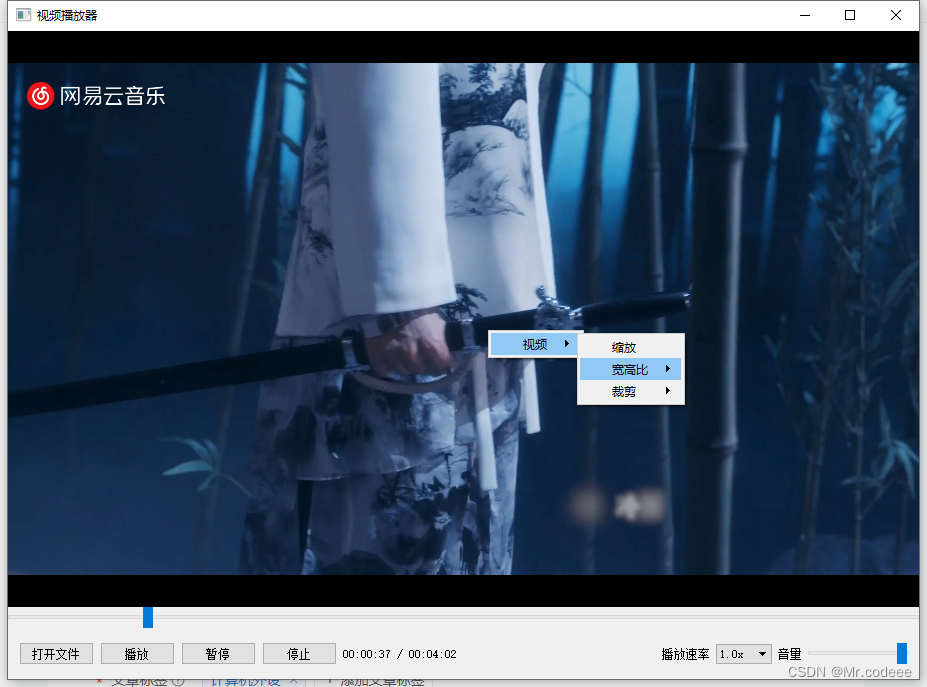
libVLC 捕获鼠标、键盘事件
在实现播放器的时候,我们需要捕获键盘、鼠标事件进行视频快进、快退,或者双击全屏/退出全屏窗口、鼠标右键弹出菜单栏。默认情况下,在使用libVLC库的时候,我们无法捕获这些事件,因为我们将Qt的视频窗口传递给了libVLC。…...

京东云0基础搭建帕鲁服务器_4核16G和8核32G幻兽帕鲁专用服务器
使用京东云服务器搭建幻兽帕鲁Palworld游戏联机服务器教程,非常简单,京东云推出幻兽帕鲁镜像系统,镜像直接选择幻兽帕鲁镜像即可一键自动部署,不需要手动操作,真正的新手0基础部署幻兽帕鲁,阿腾云atengyun.…...

OpenCV 如何使用 XML 和 YAML 文件的文件输入和输出
返回:OpenCV系列文章目录(持续更新中......) 上一篇:如何利用OpenCV4.9离散傅里叶变换 下一篇: 目标 本文内容主要介绍: 如何使用 YAML 或 XML 文件打印和读取文件和 OpenCV 的文本条目?如何对 OpenCV …...

playbook的介绍、应用与实施
playbook的介绍、应用与实施 文章目录 playbook的介绍、应用与实施1. 实施playbook1.1 Ansible Playbook与临时命令1.2 格式化Ansible Playbook1.3 运行playbook1.4 提高输出的详细程度1.5 语法验证1.6 执行空运行 2. 实施多个play2.1 缩写多个play2.2 play中的远程用户和特权升…...

uniApp使用XR-Frame创建3D场景(5)材质贴图的运用
上一篇讲解了如何在uniApp中创建xr-frame子组件并创建简单的3D场景。 这篇我们讲解在xr-frame中如何给几何体赋予贴图材质。 先看源码 <xr-scene render-system"alpha:true" bind:ready"handleReady"><xr-node><xr-assets><xr-asse…...
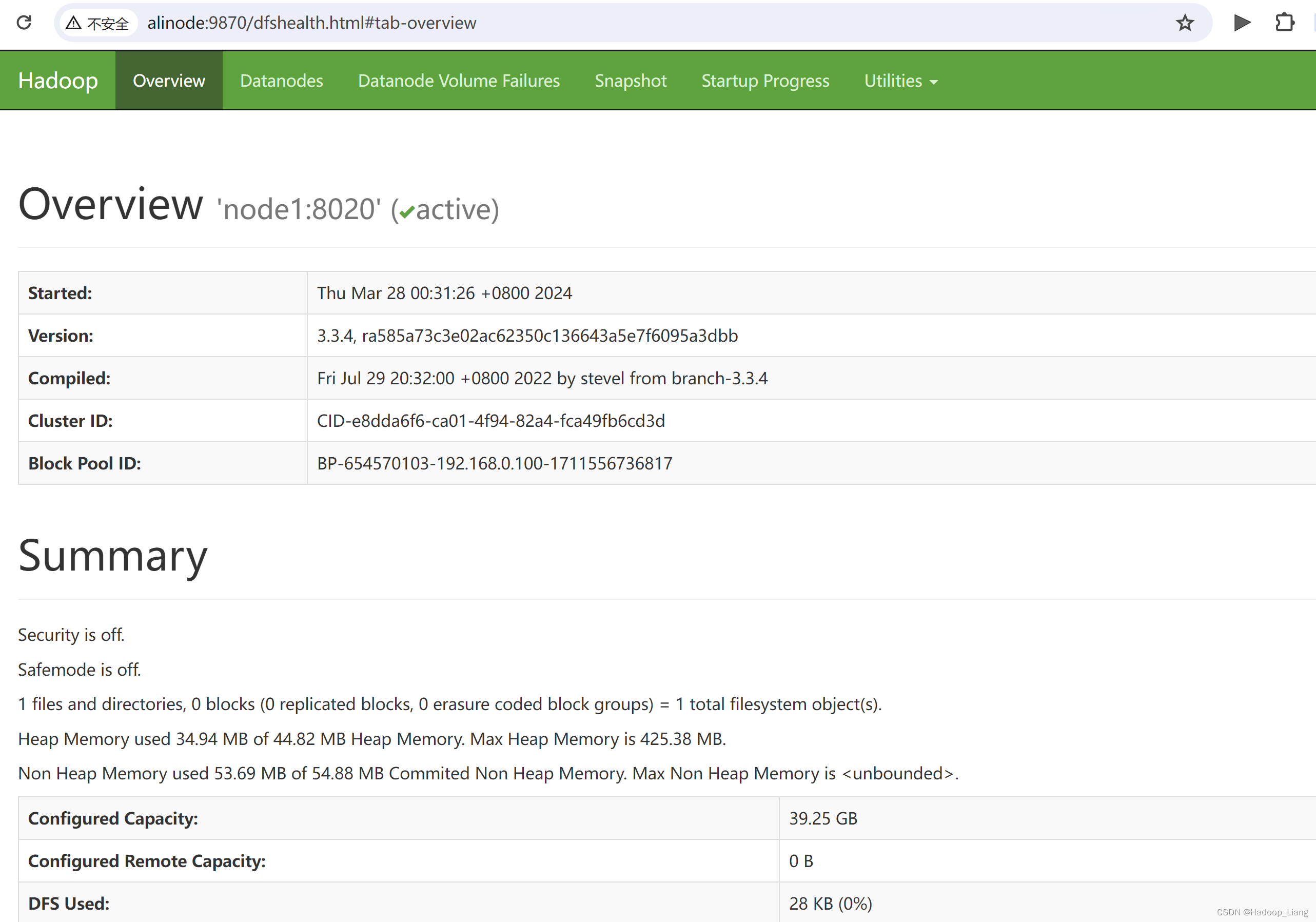
阿里云CentOS7安装Hadoop3伪分布式
ECS准备 开通阿里云ECS 略 控制台设置密码 连接ECS 远程连接工具连接阿里云ECS实例,这里远程连接工具使用xshell 根据提示接受密钥 根据提示写用户名和密码 用户名:root 密码:在控制台设置的密码 修改主机名 将主机名从localhost改为需要…...

78.子集90.子集2
78.子集 思路 又回到了组合的模板中来,这道题相比于前面的题省去了递归终止条件。大差不差。 代码 class Solution {List<List<Integer>> result new ArrayList<>();LinkedList<Integer> listnew LinkedList<>();public List<…...

基于Ubuntu的Linux系统安装jsoncpp开发包过程
执行以下命令: sudo apt update sudo apt install libjsoncpp-dev有可能出现的问题: 1.如果在执行sudo apt update时出现以下信息 Hit:1 http://mirrors.aliyun.com/ubuntu bionic InRelease Hit:2 http://mirrors.aliyun.com/ubuntu bionic-security…...

葵花卫星影像应用场景及数据获取
一、卫星参数 葵花卫星是由中国航天科技集团公司研制的一颗光学遥感卫星,代号CAS-03。该卫星于2016年11月9日成功发射,位于地球同步轨道,轨道高度约为35786公里,倾角为0。卫星设计寿命为5年,搭载了高分辨率光学相机和多…...
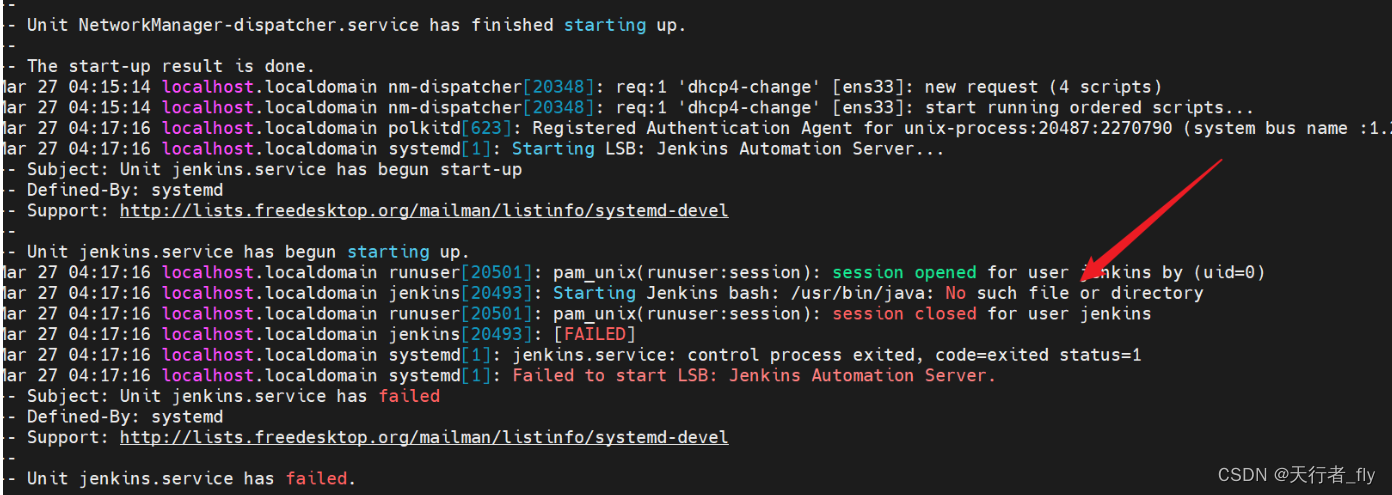
Jenkins升级中的小问题
文章目录 使用固定版本安装根据jenkins页面下载war包升级jenkins重启jenkins报错问题解决 K8s部署过程中的一些小问题 ##### Jenkins版本小插曲 在Jenkins环境进行插件安装时全部清一色飘红,发现是因为Jenkins版本过低导致,报错的位置可以找到更新je…...
Apache Hive的基本使用语法(二)
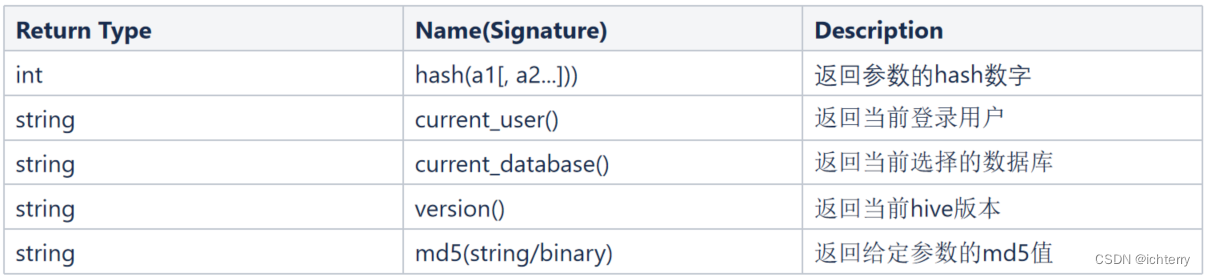
Hive SQL操作 7、修改表 表重命名 alter table score4 rename to score5;修改表属性值 # 修改内外表属性 ALTER TABLE table_name SET TBLPROPERTIES("EXTERNAL""TRUE"); # 修改表注释 ALTER TABLE table_name SET TBLPROPERTIES (comment new_commen…...

基于单片机16位智能抢答器设计
**单片机设计介绍,基于单片机16位智能抢答器设计 文章目录 一 概要二、功能设计设计思路 三、 软件设计原理图 五、 程序六、 文章目录 一 概要 基于单片机16位智能抢答器设计是一个结合了单片机技术、显示技术、按键输入技术以及声音提示技术的综合性项目。其设计…...

idea默认代码生成脚本修改
修改了下idea自带的代码生成脚本,增加了脚本代码的注释,生成了controller,service,impl,mapper,里面都是空的,具体可以根据自己的代码习惯增加 代码生成脚本的使用可以看下使用 idea 生成实体类…...
StarRocks实战——多点大数据数仓构建
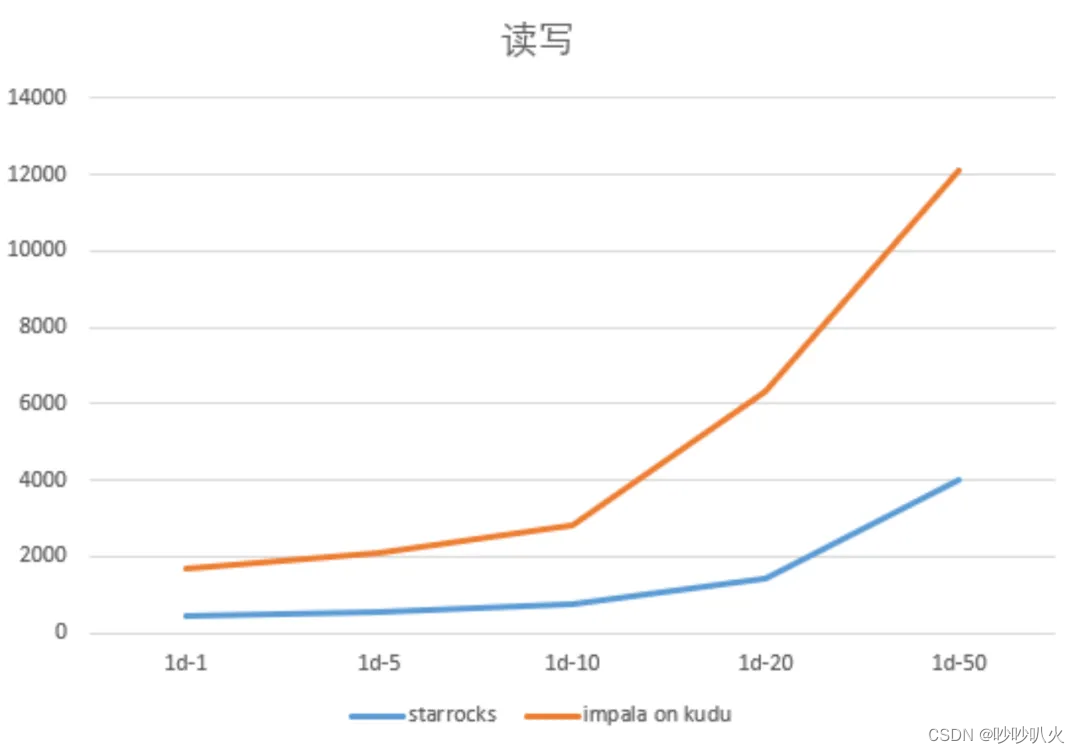
目录 前言 一、背景介绍 二、原有架构的痛点 2.1 技术成本 2.2 开发成本 2.2.1 离线 T1 更新的分析场景 2.2.2 实时更新分析场景 2.2.3 固定维度分析场景 2.2.4 运维成本 三、选择StarRocks的原因 3.1 引擎收敛 3.2 “大宽表”模型替换 3.3 简化Lambda架构 3.4 模…...

jmeter总结之:Regular Expression Extractor元件
Regular Expression Extractor是一个后处理器元件,使用正则从服务器的响应中提取数据,并将这些数据保存到JMeter变量中,以便在后续的请求或断言中使用。在处理动态数据或验证响应中的特定信息时很有用。 添加Regular Expression Extractor元…...

快速上手Spring Cloud 七:事件驱动架构与Spring Cloud
快速上手Spring Cloud 一:Spring Cloud 简介 快速上手Spring Cloud 二:核心组件解析 快速上手Spring Cloud 三:API网关深入探索与实战应用 快速上手Spring Cloud 四:微服务治理与安全 快速上手Spring Cloud 五:Spring …...

leetcode 1997.访问完所有房间的第一天
思路:动态规划前缀和 这道题还是很难的,因为你如果需要推出状态方程是很难想的。 在题中我们其实可以发现,这里在访问nextVisit数组的过程中,其实就是对于当前访问的房子之前的房子进行了回访。 怎么说呢?比如你现在…...

全球首款量产载人变形机甲,硬核科技颠覆出行想象
全球首款量产版载人变形机甲!2026 年 5 月 12 日,中国宇树科技正式发布 GD01,既能载人操控、又能双足 / 四足快速变形,定位民用交通工具,载人后总重约 500kg,直接拉满硬核科技期待感!一、GD01 核…...

现代软件工程样板项目:从设计到实践的全栈项目初始化指南
1. 项目概述:从仓库名到项目骨架的深度解构看到advhcghbot/sample-project-2026这个项目标题,很多人的第一反应可能是:“这看起来像是一个占位符或者模板项目。” 没错,从字面上看,“sample-project”直译就是“示例项…...

月薪3000和年薪百万,差距凭什么这么大?行业“薪资金字塔”大揭秘!
文章揭示了具身智能行业内部的巨大薪资差距,分为金字塔底层(机器人训练师)、中层(AI应用/AI Agent开发)和顶层(核心算法人才)三个层次。底层薪资约为19.5万元,主要依靠执行力和耐心&…...
一种新型傅里叶邻接Transformer用于脑电情绪识别
该片文章是频域先验 空间拓扑 Transformer在 EEG 情绪识别的里程碑,针对现有模型频域特征挖掘不足、Transformer 缺乏归纳偏置、跨被试泛化差三大核心痛点,提出傅里叶邻接 Transformer(FAT),在 SEED、DEAP 数据集上刷…...

魔兽争霸III终极优化指南:WarcraftHelper让你的游戏体验焕然一新
魔兽争霸III终极优化指南:WarcraftHelper让你的游戏体验焕然一新 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper是一款专为…...

QConf灰度发布策略详解:零风险配置变更的完整方案
QConf灰度发布策略详解:零风险配置变更的完整方案 【免费下载链接】QConf QConf是奇虎360开源的一款分布式配置管理平台,能够集中管理和分发应用程序的配置数据,并支持高可用性和水平扩展,尤其适用于大规模分布式系统的配置管理。…...

从零开始使用Taotoken为你的爬虫项目添加AI解析功能
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 从零开始使用Taotoken为你的爬虫项目添加AI解析功能 在数据采集项目中,我们常常会遇到非结构化或半结构化的网页内容。…...

工业传动避坑:3 个皮带张力调节技巧,杜绝早期失效
工业传动避坑:3 个皮带张力调节技巧,杜绝早期失效在工业传动系统运维中,盖茨同步带、工业皮带的早期失效是高频痛点——不少工程师频繁更换皮带,却始终无法解决根本问题,反而增加运维成本。事实上,90%以上的…...

Rust GraphQL实战:async-graphql深度解析
Rust GraphQL实战:async-graphql深度解析 引言 在Rust开发中,GraphQL是构建灵活API的重要技术。作为一名从Python转向Rust的后端开发者,我深刻体会到async-graphql在构建GraphQL服务方面的优势。async-graphql提供了类型安全的Schema定义和异…...

电子防盗扣用钢丝绳的抗拉强度与直径的关联规律
引言钢丝绳在现代工业领域中扮演着至关重要的角色。从大型机械设备到精细的电子防盗扣,钢丝绳凭借其独特的性能,保障着各类设备的稳定运行。在电子防盗扣的应用场景中,钢丝绳的抗拉强度直接关系到防盗扣的可靠性和安全性,而其直径…...