yolov8直接调用zed相机实现三维测距(python)
yolov8直接调用zed相机实现三维测距(python)
- 1. 相关配置
- 2. 版本一
- 2.1 相关代码
- 2.2 实验结果
- 3. 版本二
- 3.1 相关代码
- 3.2 实验结果
相关链接
此项目直接调用zed相机实现三维测距,无需标定,相关内容如下:
1.yolov5直接调用zed相机实现三维测距(python)
2. yolov4直接调用zed相机实现三维测距
3. Windows+YOLOV8环境配置
4.具体实现效果已在哔哩哔哩发布,点击此链接跳转
本篇博文工程源码下载(麻烦github给个星星)
下载链接:https://github.com/up-up-up-up/zed-yolov8
附:Zed调用YOLOv7测距也已经实现,但是3060笔记本6G显存带不动,在大现存服务器上可以运行,可能是由于YOLOv7网络结构导致的,由于不具备普适性,就不再写相关文章了,有需要的可以仿照这个代码去改写
1. 相关配置
python==3.7
Windows-pycharm
zed api 具体配置见 (zed api 配置步骤)
由于我电脑之前python版本为3.7,yolov8要求python最低为3.8,所以本次实验直接在虚拟环境里进行,未配置gpu,可能看着卡卡的,有需要的可以配置一下,原理是一样的
2. 版本一
2.1 相关代码
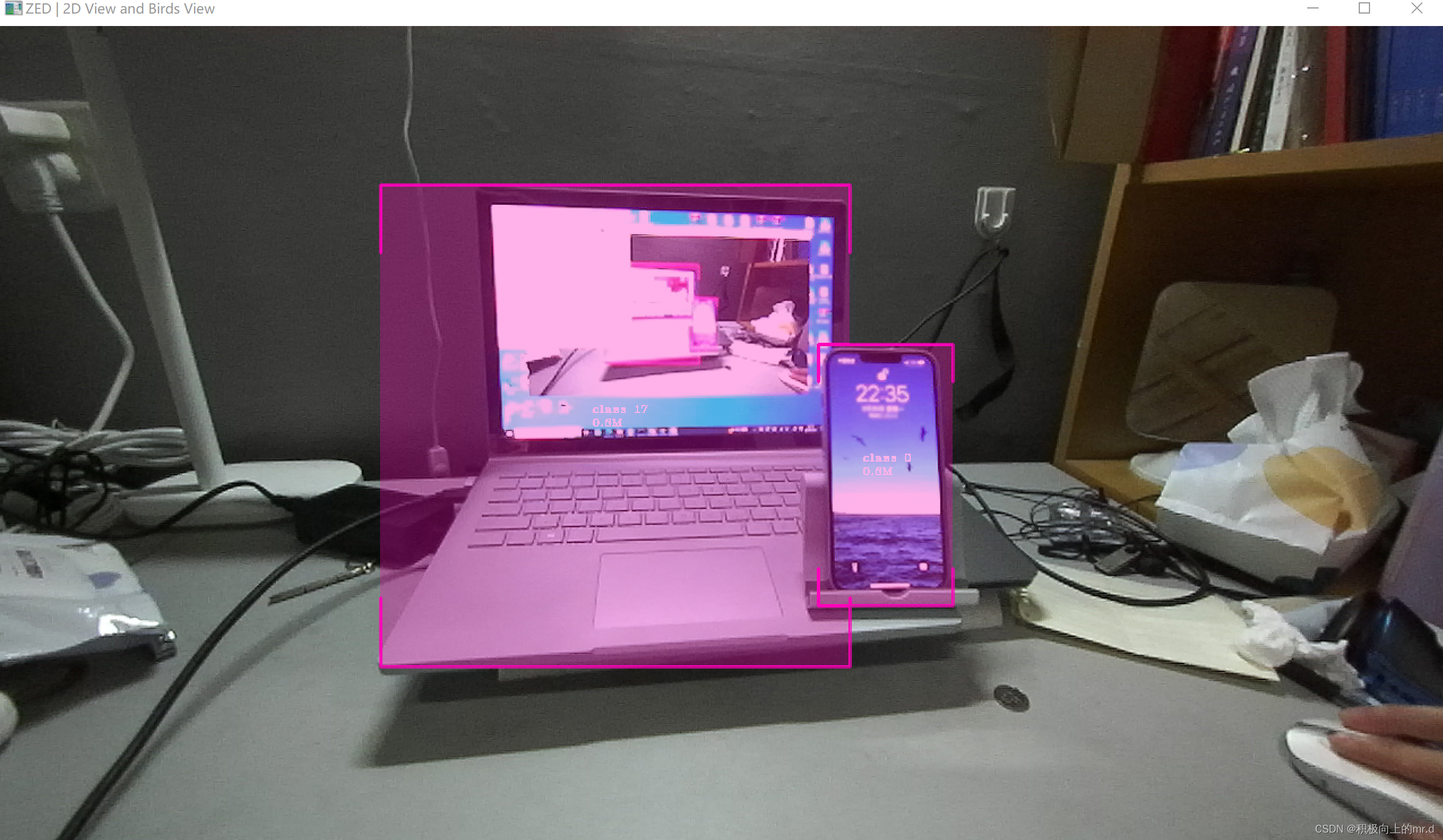
主代码 zed-yolo.py,具体放置在yolov8主目录下,盒子形式展现,可实现测距+跟踪
#!/usr/bin/env python3import sys
import numpy as npimport argparse
import torch
import cv2
import pyzed.sl as sl
from ultralytics import YOLOfrom threading import Lock, Thread
from time import sleepimport ogl_viewer.viewer as gl
import cv_viewer.tracking_viewer as cv_viewerlock = Lock()
run_signal = False
exit_signal = Falsedef xywh2abcd(xywh, im_shape):output = np.zeros((4, 2))# Center / Width / Height -> BBox corners coordinatesx_min = (xywh[0] - 0.5*xywh[2]) #* im_shape[1]x_max = (xywh[0] + 0.5*xywh[2]) #* im_shape[1]y_min = (xywh[1] - 0.5*xywh[3]) #* im_shape[0]y_max = (xywh[1] + 0.5*xywh[3]) #* im_shape[0]# A ------ B# | Object |# D ------ Coutput[0][0] = x_minoutput[0][1] = y_minoutput[1][0] = x_maxoutput[1][1] = y_minoutput[2][0] = x_maxoutput[2][1] = y_maxoutput[3][0] = x_minoutput[3][1] = y_maxreturn outputdef detections_to_custom_box(detections, im0):output = []for i, det in enumerate(detections):xywh = det.xywh[0]# Creating ingestable objects for the ZED SDKobj = sl.CustomBoxObjectData()obj.bounding_box_2d = xywh2abcd(xywh, im0.shape)obj.label = det.clsobj.probability = det.confobj.is_grounded = Falseoutput.append(obj)return outputdef torch_thread(weights, img_size, conf_thres=0.2, iou_thres=0.45):global image_net, exit_signal, run_signal, detectionsprint("Intializing Network...")model = YOLO(weights)while not exit_signal:if run_signal:lock.acquire()img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2RGB)# https://docs.ultralytics.com/modes/predict/#video-suffixesdet = model.predict(img, save=False, imgsz=img_size, conf=conf_thres, iou=iou_thres)[0].cpu().numpy().boxes# ZED CustomBox format (with inverse letterboxing tf applied)detections = detections_to_custom_box(det, image_net)lock.release()run_signal = Falsesleep(0.01)def main():global image_net, exit_signal, run_signal, detectionscapture_thread = Thread(target=torch_thread, kwargs={'weights': opt.weights, 'img_size': opt.img_size, "conf_thres": opt.conf_thres})capture_thread.start()print("Initializing Camera...")zed = sl.Camera()input_type = sl.InputType()if opt.svo is not None:input_type.set_from_svo_file(opt.svo)# Create a InitParameters object and set configuration parametersinit_params = sl.InitParameters(input_t=input_type, svo_real_time_mode=True)init_params.coordinate_units = sl.UNIT.METERinit_params.depth_mode = sl.DEPTH_MODE.ULTRA # QUALITYinit_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UPinit_params.depth_maximum_distance = 50runtime_params = sl.RuntimeParameters()status = zed.open(init_params)if status != sl.ERROR_CODE.SUCCESS:print(repr(status))exit()image_left_tmp = sl.Mat()print("Initialized Camera")positional_tracking_parameters = sl.PositionalTrackingParameters()# If the camera is static, uncomment the following line to have better performances and boxes sticked to the ground.# positional_tracking_parameters.set_as_static = Truezed.enable_positional_tracking(positional_tracking_parameters)obj_param = sl.ObjectDetectionParameters()
# obj_param.detection_model = sl.OBJECT_DETECTION_MODEL.CUSTOM_BOX_OBJECTSobj_param.enable_tracking = Truezed.enable_object_detection(obj_param)objects = sl.Objects()obj_runtime_param = sl.ObjectDetectionRuntimeParameters()# Displaycamera_infos = zed.get_camera_information()camera_res = camera_infos.camera_resolution# Create OpenGL viewerviewer = gl.GLViewer()point_cloud_res = sl.Resolution(min(camera_res.width, 720), min(camera_res.height, 404))point_cloud_render = sl.Mat()viewer.init(camera_infos.camera_model, point_cloud_res, obj_param.enable_tracking)point_cloud = sl.Mat(point_cloud_res.width, point_cloud_res.height, sl.MAT_TYPE.F32_C4, sl.MEM.CPU)image_left = sl.Mat()# Utilities for 2D displaydisplay_resolution = sl.Resolution(min(camera_res.width, 1280), min(camera_res.height, 720))image_scale = [display_resolution.width / camera_res.width, display_resolution.height / camera_res.height]image_left_ocv = np.full((display_resolution.height, display_resolution.width, 4), [245, 239, 239, 255], np.uint8)# # Utilities for tracks view# camera_config = camera_infos.camera_configuration# tracks_resolution = sl.Resolution(400, display_resolution.height)# track_view_generator = cv_viewer.TrackingViewer(tracks_resolution, camera_config.fps, init_params.depth_maximum_distance)# track_view_generator.set_camera_calibration(camera_config.calibration_parameters)# image_track_ocv = np.zeros((tracks_resolution.height, tracks_resolution.width, 4), np.uint8)# Camera posecam_w_pose = sl.Pose()while viewer.is_available() and not exit_signal:if zed.grab(runtime_params) == sl.ERROR_CODE.SUCCESS:# -- Get the imagelock.acquire()zed.retrieve_image(image_left_tmp, sl.VIEW.LEFT)image_net = image_left_tmp.get_data()lock.release()run_signal = True# -- Detection running on the other threadwhile run_signal:sleep(0.001)# Wait for detectionslock.acquire()# -- Ingest detectionszed.ingest_custom_box_objects(detections)lock.release()zed.retrieve_objects(objects, obj_runtime_param)# -- Display# Retrieve display datazed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA, sl.MEM.CPU, point_cloud_res)point_cloud.copy_to(point_cloud_render)zed.retrieve_image(image_left, sl.VIEW.LEFT, sl.MEM.CPU, display_resolution)zed.get_position(cam_w_pose, sl.REFERENCE_FRAME.WORLD)# 3D renderingviewer.updateData(point_cloud_render, objects)# 2D renderingnp.copyto(image_left_ocv, image_left.get_data())cv_viewer.render_2D(image_left_ocv, image_scale, objects, obj_param.enable_tracking)global_image = image_left_ocv# global_image = cv2.hconcat([image_left_ocv, image_track_ocv])# # Tracking view# track_view_generator.generate_view(objects, cam_w_pose, image_track_ocv, objects.is_tracked)cv2.imshow("ZED | 2D View and Birds View", global_image)key = cv2.waitKey(10)if key == 27:exit_signal = Trueelse:exit_signal = Trueviewer.exit()exit_signal = Truezed.close()if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--weights', type=str, default='yolov8n.pt', help='model.pt path(s)')parser.add_argument('--svo', type=str, default=None, help='optional svo file')parser.add_argument('--img_size', type=int, default=416, help='inference size (pixels)')parser.add_argument('--conf_thres', type=float, default=0.4, help='object confidence threshold')opt = parser.parse_args()with torch.no_grad():main()2.2 实验结果
测距图(感觉挺精准的)
视频展示:
Zed相机+YOLOv8目标检测跟踪
3. 版本二
3.1 相关代码
主代码 zed.py,具体放置在yolov8主目录下,可实现测距+跟踪+分割
#!/usr/bin/env python3
import math
import sys
import numpy as np
from PIL import Image
import argparse
import torch
import cv2
import pyzed.sl as sl
from ultralytics.utils.plotting import Annotator, colors, save_one_box
from ultralytics import YOLO
from threading import Lock, Thread
from time import sleepimport ogl_viewer.viewer as gl
import cv_viewer.tracking_viewer as cv_viewerzed = sl.Camera()# Create a InitParameters object and set configuration parameters
init_params = sl.InitParameters()
init_params.camera_resolution = sl.RESOLUTION.HD720
init_params.coordinate_units = sl.UNIT.METER
init_params.depth_mode = sl.DEPTH_MODE.ULTRA # QUALITY
init_params.coordinate_system = sl.COORDINATE_SYSTEM.RIGHT_HANDED_Y_UP
init_params.depth_maximum_distance = 20 # 设置最远距离runtime_params = sl.RuntimeParameters()
status = zed.open(init_params)if status != sl.ERROR_CODE.SUCCESS:print(repr(status))exit()image_left_tmp = sl.Mat()
print("Initialized Camera")
positional_tracking_parameters = sl.PositionalTrackingParameters()
zed.enable_positional_tracking(positional_tracking_parameters)obj_param = sl.ObjectDetectionParameters()
obj_param.detection_model = sl.DETECTION_MODEL.CUSTOM_BOX_OBJECTS
obj_param.enable_tracking = True
zed.enable_object_detection(obj_param)
objects = sl.Objects()
obj_runtime_param = sl.ObjectDetectionRuntimeParameters()point_cloud_render = sl.Mat()
point_cloud = sl.Mat()
image_left = sl.Mat()
depth = sl.Mat()
# Utilities for 2D display
if __name__ == '__main__':model = YOLO("./yolov8n.pt")while True:if zed.grab(runtime_params) == sl.ERROR_CODE.SUCCESS:# -- Get the imagezed.retrieve_image(image_left_tmp, sl.VIEW.LEFT)image_net = image_left_tmp.get_data()zed.retrieve_measure(depth, sl.MEASURE.DEPTH)zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA)img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2BGR)result = model.predict(img, conf=0.5)annotated_frame = result[0].plot()boxes = result[0].boxes.xywhfor i, box in enumerate(boxes):x_center, y_center, width, height = box.tolist()point_cloud_value = point_cloud.get_value(x_center, y_center)[1]point_cloud_value = point_cloud_value * -1000.00if point_cloud_value[2] > 0.00:try:point_cloud_value[0] = round(point_cloud_value[0])point_cloud_value[1] = round(point_cloud_value[1])point_cloud_value[2] = round(point_cloud_value[2])distance = math.sqrt(point_cloud_value[0] * point_cloud_value[0] + point_cloud_value[1] *point_cloud_value[1] +point_cloud_value[2] * point_cloud_value[2])print(distance)dis = []dis.append(distance)text = "dis:%0.2fm" % distancecv2.putText(annotated_frame, text, (int(x_center), int(y_center)),cv2.FONT_ITALIC, 1.0, (0, 0, 255), 2)except:passcv2.imshow('00', annotated_frame)key = cv2.waitKey(1)if key == 'q':breakzed.retrieve_objects(objects, obj_runtime_param)zed.retrieve_image(image_left, sl.VIEW.LEFT)zed.close()
3.2 实验结果
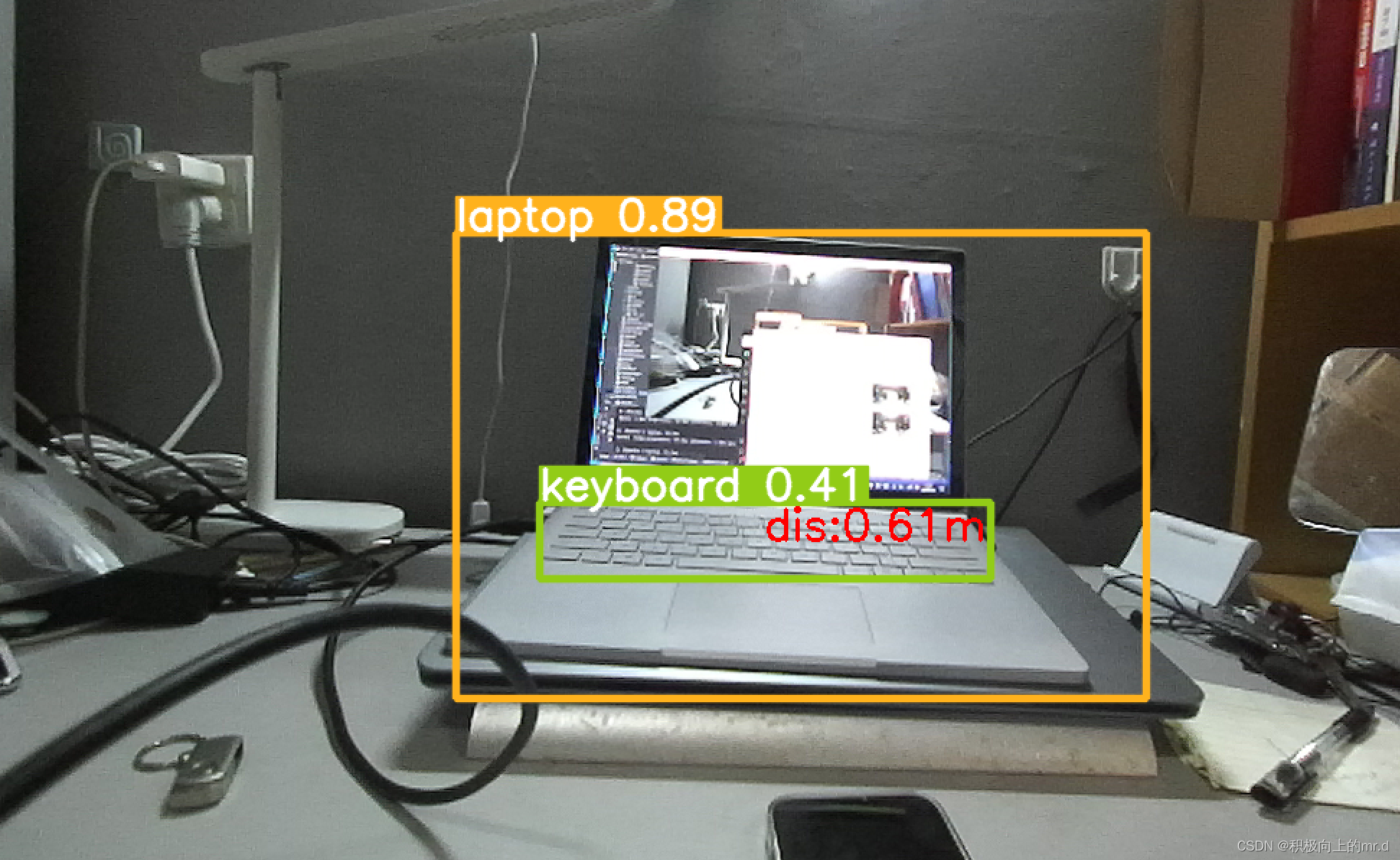
可实现测距、跟踪和分割功能,这个代码没有加多线程,速度够用懒得写了,对速率要求高的可以自己写一下,实现不同功能仅需修改以下代码,具体见 此篇文章
model = YOLO("./yolov8n.pt")img = cv2.cvtColor(image_net, cv2.COLOR_BGRA2BGR)result = model.predict(img, conf=0.5)
测距功能
跟踪功能

分割功能

视频展示
相关文章:
yolov8直接调用zed相机实现三维测距(python)
yolov8直接调用zed相机实现三维测距(python) 1. 相关配置2. 版本一2.1 相关代码2.2 实验结果 3. 版本二3.1 相关代码3.2 实验结果 相关链接 此项目直接调用zed相机实现三维测距,无需标定,相关内容如下: 1.yolov5直接调…...

element跑马灯/轮播图,第一页隐藏左边按钮,最后一页隐藏右边按钮(vue 开箱即用)
图示: 第一步: <el-carousel :class"changeIndex0?leftBtnNone:changeIndeximgDataList.length-1? rightBtnNone:" height"546px" :autoplay"false" change"changeNext"><el-carousel-item v-for…...

下载及安装PHP,composer,phpstudy,thinkPHP6.0框架
文章目录 目录 文章目录 前言 一、下载PHP 二、下载composer 三、下载PHPstudy 四、下载think PHP 1.下载 2.多应用开发 前言 thinkPHP是一款开源的PHP框架,它是基于MVC(Model-View-Controller)设计模式构建的。thinkPHP提供了丰富的…...

volatile使用场景总结
volatile关键字在Java中用于确保变量的可见性以及防止指令重排序,特别是在没有使用锁定机制时对变量进行读写的多线程环境中。以下是需要使用volatile修饰的一些场景: 确保变量的可见性 当一个变量被多个线程访问,且至少有一个线程在写&…...

AcWing 1413. 矩形牛棚(每日一题)
原题链接:1413. 矩形牛棚 - AcWing题库 作为一个资本家,农夫约翰希望通过购买更多的奶牛来扩大他的牛奶业务。 因此,他需要找地方建立一个新的牛棚。 约翰购买了一大块土地,这个土地可以看作是一个 R 行(编号 1∼R&…...

macOS Sonoma 14.4.1 (23E224) 正式版发布,ISO、IPSW、PKG 下载
macOS Sonoma 14.4.1 (23E224) 正式版发布,ISO、IPSW、PKG 下载 2024 年 3 月 26 日凌晨,macOS Sonoma 14.4.1 更新修复了一个可能导致连接到外部显示器的 USB 集线器无法被识别的问题。它还解决了可能导致 Java 应用程序意外退出的问题,并修…...
WPF使用外部字体,思源黑体,为例子
1.在工程中新建文件夹,命名为“Font"。 2.将下载好的字体文件复制到Font文件夹。 3.在工程中,加入静态资源 <Window.Resources><FontFamily x:Key"SYBold">/AnalyzeImage;Component/Font/#思源黑体 CN Bold</FontFamily…...
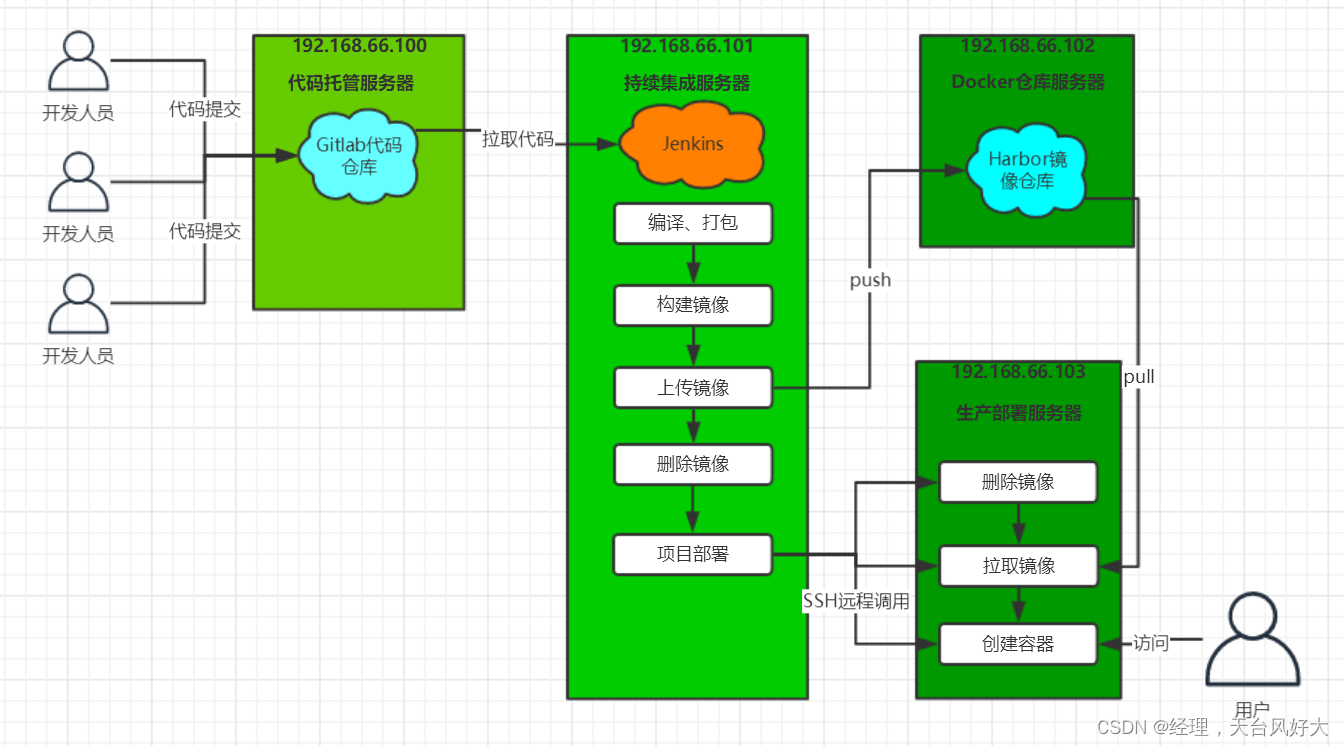
9、jenkins微服务持续集成(一)
文章目录 一、流程说明二、源码概述三、本地部署3.1 SpringCloud微服务部署本地运行微服务本地部署微服务3.2 静态Web前端部署四、Docker快速入门一、流程说明 Jenkins+Docker+SpringCloud持续集成流程说明 大致流程说明: 开发人员每天把代码提交到Gitlab代码仓库Jenkins从G…...

VOC(客户之声)赋能智能家居:打造个性化、交互式的未来生活体验
随着科技的飞速发展,智能家居已成为现代家庭不可或缺的一部分。然而,如何让智能家居更好地满足用户需求,提供更贴心、更智能的服务,一直是行业关注的焦点。在这个背景下,VOC(客户之声)作为一种用…...

时序预测 | Matlab实现GWO-BP灰狼算法优化BP神经网络时间序列预测
时序预测 | Matlab实现GWO-BP灰狼算法优化BP神经网络时间序列预测 目录 时序预测 | Matlab实现GWO-BP灰狼算法优化BP神经网络时间序列预测预测效果基本介绍程序设计参考资料 预测效果 基本介绍 1.Matlab实现GWO-BP灰狼算法优化BP神经网络时间序列预测(完整源码和数据…...

node.js学习(2)
版权声明 以下文章为尚硅谷PDF资料,B站视频链接:【尚硅谷Node.js零基础视频教程,nodejs新手到高手】仅供个人学习交流使用。如涉及侵权问题,请立即与本人联系,本人将积极配合删除相关内容。感谢理解和支持,…...

【pytest】测试数据存储在 Excel 或 TXT 文件中,如何参数化
如果测试数据存储在 Excel 或 TXT 文件中,你可以使用外部库来读取这些数据,并将其转化为参数化测试所需的格式。下面我将分别展示如何从这两种文件中读取数据,并用于参数化测试。 从 Excel 文件中读取测试数据 你可以使用 pandas 库来读取 …...
ubuntu22.04@Jetson Orin Nano安装配置VNC服务端
ubuntu22.04Jetson Orin Nano安装&配置VNC服务端 1. 源由2. 环境3. VNC安装Step 1: update and install xserver-xorg-video-dummyStep 2: Create config for dummy virtual displayStep3: Add the following contents in xorg.conf.dummyStep 4: Update /etc/X11/xorg.con…...
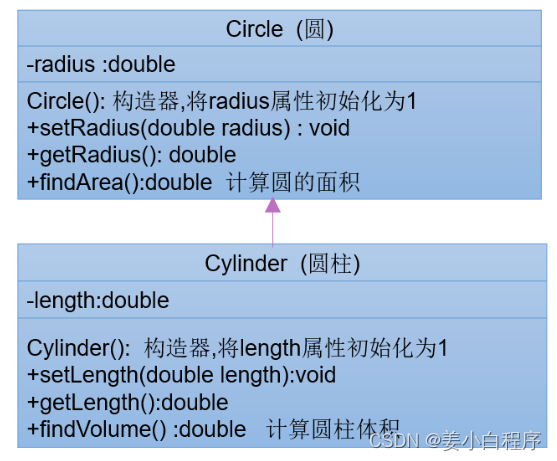
面向对象特征二:继承
继承的概述 生活中的继承 财产继承: 绿化:前人栽树,后人乘凉 “绿水青山,就是金山银山” 样貌: 继承之外,是不是还可以"进化": 继承有延续(下一代延续上一代的基因、财…...

宝塔面板CentOS Stream 8 x86 下如何安装openlitespeed
宝塔自带的软件商店里如果没办法安装,那么我们可以通过指令来手动安装: 第一步: yum install epel-release Package epel-release-8-19.el8.noarch is already installed. Dependencies resolved. Nothing to do. Complete! 第二步&#…...
)
LeetCode 2952.需要添加的硬币的最小数量:贪心(排序)
【LetMeFly】2952.需要添加的硬币的最小数量:贪心(排序) 力扣题目链接:https://leetcode.cn/problems/minimum-number-of-coins-to-be-added/ 给你一个下标从 0 开始的整数数组 coins,表示可用的硬币的面值ÿ…...
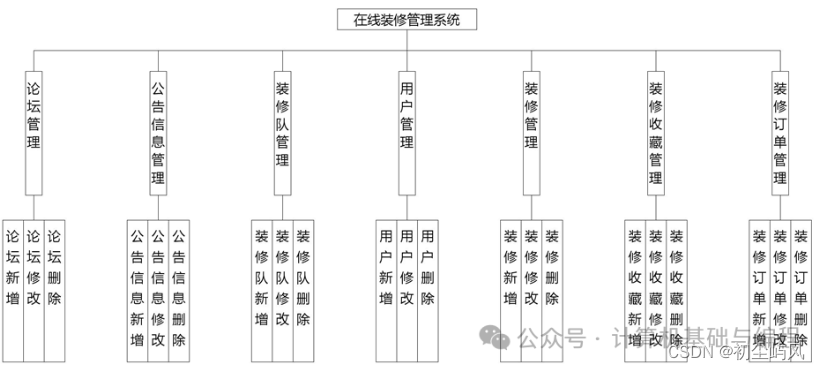
基于SpringBoot + Vue实现的在线装修管理系统设计与实现+毕业论文
介绍 系统包含用户、装修队、管理员三个角色 管理员: 管理员管理:管理其他管理员的账号和权限,确保系统管理的层次化和安全性。 装修队管理:审核装修队的资质,管理装修队的人员信息,监控工程进度ÿ…...

阿里云安全产品简介,Web应用防火墙与云防火墙产品各自作用介绍
在阿里云的安全类云产品中,Web应用防火墙与云防火墙是用户比较关注的安全类云产品,二则在作用上并不是完全一样的,Web应用防火墙是一款网站Web应用安全的防护产品,云防火墙是一款公共云环境下的SaaS化防火墙,本文为大家…...

作业 二维数组-定位问题
图形相似度 描述 给出两幅相同大小的黑白图像(用0-1矩阵)表示,求它们的相似度。 说明:若两幅图像在相同位置上的像素点颜色相同,则称它们在该位置具有相同的像素点。 两幅图像的相似度定义为相同像素点数占总像素点数…...
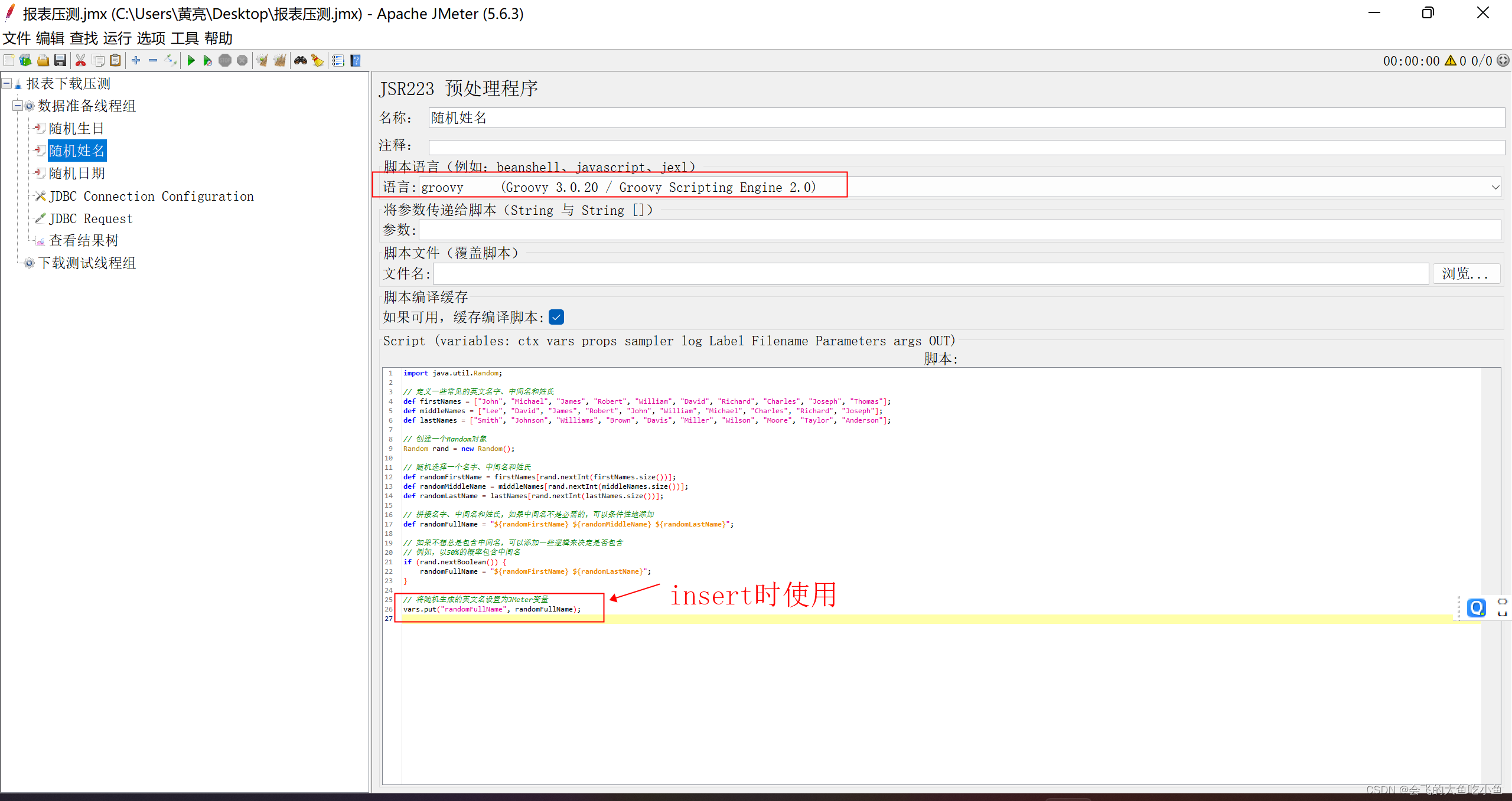
通过Jmeter准备压测数据-mysql示例
1、新建线程组 总共30万条数据 2、创建jdbc链接 创建jdbc连接配置 配置mysql连接 需要在jmeter安装的路径\apache-jmeter-5.6.3\lib\ext 目录下添加mysql 驱动 3、创建jdbc请求 jdbc链接名称需要与上一步中的保持一致,同时添加insert语句 例如 INSERT INTO test…...

家庭影院系统构建指南:从流媒体技术到硬件选型
1. 疫情下的娱乐变局:从影院到客厅的深度迁移作为一名长期关注消费电子与家庭娱乐领域的从业者,我亲历了过去几年行业最剧烈的震荡。疫情像一只无形的手,强行按下了社会运行的暂停键,却又为另一个赛道按下了加速键。当电影院的大门…...

AI智能体审批系统设计:从规则到价值网络的动态决策引擎
1. 项目概述:为什么AI需要“举手提问”?在AI智能体(Agent)日益深入业务流程自动化的今天,一个核心的、却常被忽视的问题浮出水面:这个拥有一定自主决策能力的“数字员工”,在什么情况下应该停下…...

稀疏结式与动作矩阵:视觉几何求解器中的等价性证明
1. 项目概述:从视觉几何到代数求解的桥梁 在计算机视觉领域,尤其是三维重建、相机标定、姿态估计这些核心任务中,我们常常会遇到一个看似简单、实则棘手的问题:求解一个由多个多项式方程构成的方程组。比如,从两幅图像…...

深度学习在系外行星探测中的应用:ExoDNN框架解析与实践
1. 项目概述:当深度学习遇见星空系外行星探测,这个听起来就充满科幻感的领域,在过去二十年里彻底改变了我们对宇宙的认知。从最初通过“凌星法”和“径向速度法”发现几颗气态巨行星,到如今TESS、开普勒等太空望远镜的海量数据中&…...

当1000A牵引电流遇上微安级信号:高铁轨道电路中扼流变压器的‘抗干扰’实战解析
高铁轨道电路中扼流变压器的抗干扰设计与工程实践 电气化铁路的轨道电路系统面临着前所未有的电磁兼容挑战——如何在承载1000A级牵引电流的钢轨上,同时可靠传输微安级的信号电流?这个看似矛盾的需求,正是现代高铁信号系统设计的核心难题之一…...

【信息科学与工程学】【通信工程】第五十九篇 面向SDN城域网网络的算法工程02
条目:SDN-Metro-0065 (IPoE入L3VPN业务) 字段 内容 1. 编号 SDN-Metro-0065 2. 类别 业务领域 / 接入与VPN 3. 领域 基于动态策略的IPoE用户接入L3VPN业务 4. 模型配方 IPoE(IP over Ethernet)用户通过以太网接入,并直接进入运营商的L3VPN网络,访问企业内…...

多渠道订单数据处理自动化,落地步骤与ERP打通方案 | 2026企业级智能体实战手册
在2026年的数字化转型深水区,企业面临的不再是“是否要自动化”的问题, 而是如何在高并发、多维度的全渠道业务压力下, 实现订单流、资金流与信息流的绝对同步。 传统的OMS(订单管理系统)与ERP(企业资源计划…...
)
告别信号失真!手把手教你理解5G基站RRU里的DPD黑科技(附FPGA实现思路)
告别信号失真!手把手教你理解5G基站RRU里的DPD黑科技(附FPGA实现思路) 在5G基站射频单元(RRU)的调试现场,工程师们最常遇到的"拦路虎"之一就是功率放大器(PA)的非线性失真…...

从仿真结果到科研图表:手把手教你用Tonyplot处理Silvaco TCAD数据
从仿真结果到科研图表:手把手教你用Tonyplot处理Silvaco TCAD数据 在半导体器件研究中,TCAD仿真数据的可视化呈现往往决定着研究成果的传达效果。许多研究者花费大量时间完成Silvaco仿真后,却苦于无法将原始数据转化为符合学术出版要求的专业…...

AzurLaneAutoScript:如何用智能自动化脚本彻底解放你的碧蓝航线时间?
AzurLaneAutoScript:如何用智能自动化脚本彻底解放你的碧蓝航线时间? 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLane…...