睿尔曼超轻量仿人机械臂之复合机器人底盘介绍及接口调用
机器人移动平台是一个包含完整成熟的感知、认知和定位导航能力的轮式机器人底盘产品级平台,产品致力于为各行业细分市场的商用轮式服务机器人提供一站式移动机器人解决方案,让合作伙伴专注在核心业务/人机交互的实现。以下是我司产品双臂机器人以及复合升降机器人,都搭载了移动底盘。


底盘参数
- 轮对
- 六轮(2个驱动轮+4个万向轮)
- 差速驱动+主动悬挂 250W轮毂伺服电机x2个
- 重量
- 50Kg
- 承重能力
- 承重60Kg(过坎能力8mm,爬坡角度5°)
- 承重40Kg(过坎能力12mm,爬坡角度5°)
- 空载(过坎能力20mm,爬坡角度10°)
- 尺寸
- 高:280mm 直径:505mm
- 电源
- 18650锂离子电池组: 25.2V 20Ah(21V-29.4V) 4A适配器
- 可选25.2V 35Ah 6A适配器
- 满电工作时长
- 20Ah电池: 静止(0m/s)可运行20小时, 无负载运行(0.7m/s)可运行11小时

Web示教器界面的进入以及在示教器里面禁行移动测试
连接底盘进入底盘web示教器的方式可以有两种,一种是有线连接然后在浏览器输入对应的ip地址我这里的IP地址为192.168.10.10:9001。一种是通过无线的方式连接底盘的ip,无线连接的WiFi是以admin开头,密码默认为12345678,再在了浏览器输入对应的IP地址即可进入web界面。我这里使用有线连接的方式进入(不用输入密码)web界面如下:
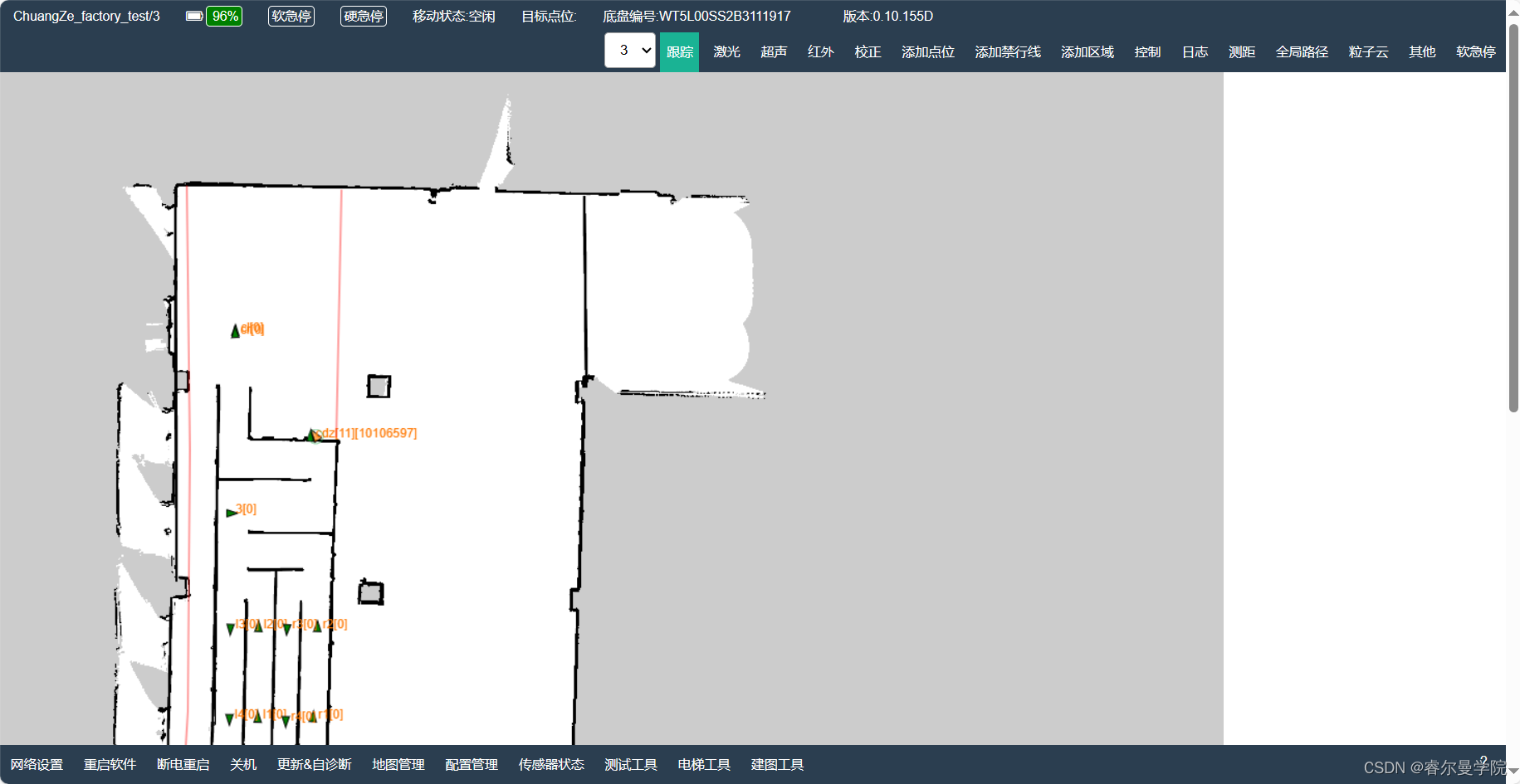
值得注意的是,当我们从新打开地图后,我们进入后先矫正底盘的位置然后再进行操作,矫正完成后再进行所需点位的建立,建立好点所需要的的点位后,我们进入以下的测试工具。
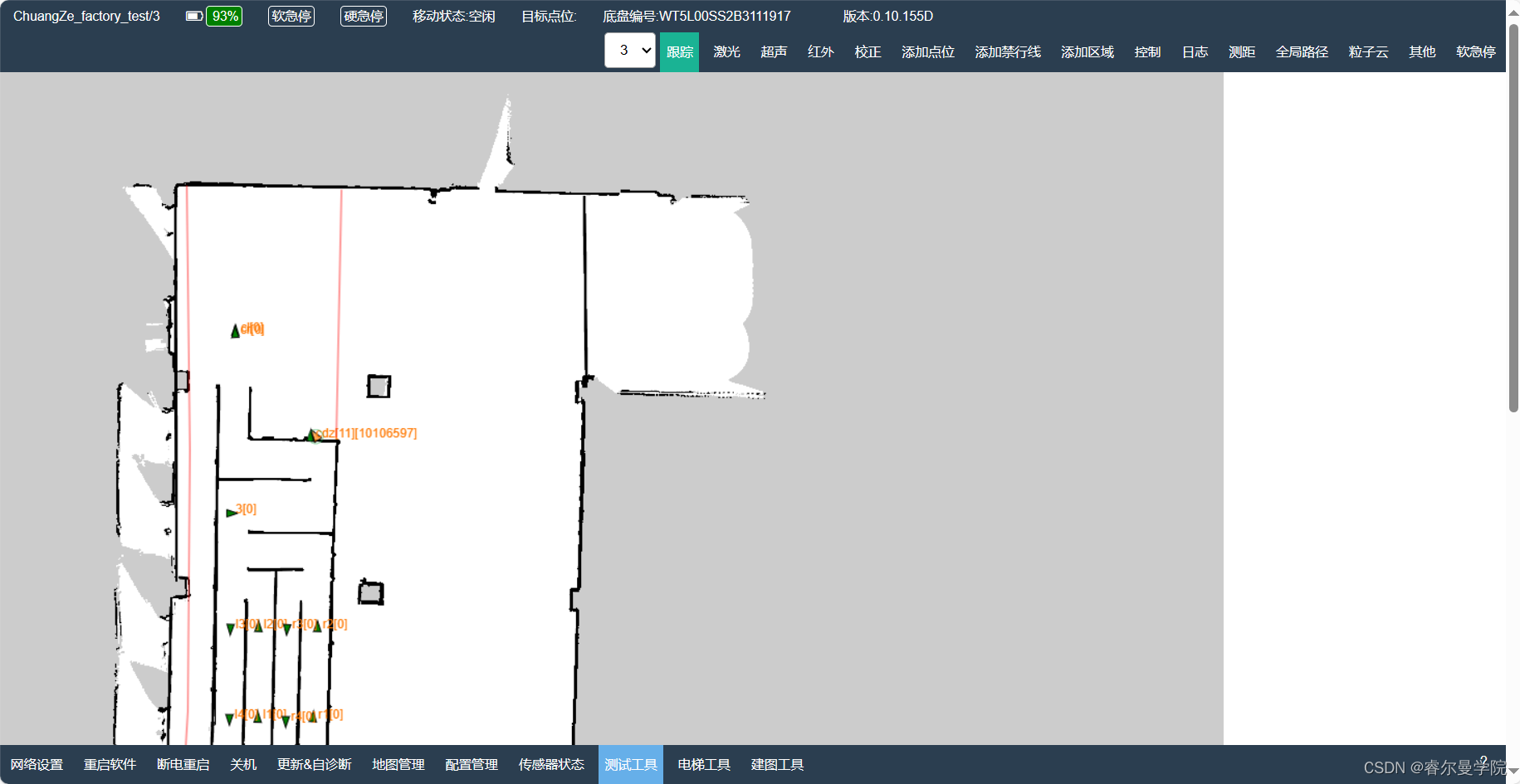
随即会进行url的跳转进入到如下的界面

我们可以进行点位的选取以及循环次数的设置,点击开始执行确保机器人的急停处于打开状态机器人就可以按照点位来进行运动。
调用Api来进行底盘根据点位的运动
首先我们需要提前了解移动底盘的api接口文档,此次demo以两点之间的移动举例
指令: /api/move
参数:
| 名称 | 说明 | 是否必选 | 备注 | 从以下版本开始 |
| marker | 目标点位代号 | 与location 必选其一 | 优先级低于location | |
| location | x<地图中x轴坐标>,y<地图 中y轴坐标>,theta<地图中相对theta值> | 与marker 必选其一 | ||
| max_continuous_retries | 原地最大连续重试次数(机器人原地不动时,重试次数超过此值则任务失败) | 可选 | 默认30 次 | 0.7.11 |
| distance_tolerance | 距离容差,类型float,单位米。 (当目标位置被占据等原因无法到达时,机器人移动到目标此距离之内也算任务成功。) | 可选 | 默认值跟机器人型号相关 | 0.7.12 |
| theta_tolerance | 角度容差,类型float,单位弧度。(到达目标点位后,角度小于此值后任务成功) | 可选 | 默认值跟机器人型号相关 | 0.7.12 |
| angle_offset | 到达位置后的角度偏移, 例如使用marker=m1发送任务时, 会以m1的角度 +angle_offset的角度作为最终方向执行任务. | 可选 | 单位弧度, 范围[-3.14, 3.14], 默认0 | 0.8.2 |
| yaw_goal_reverse_allowed | 双向停靠控制参数,取值1或 0或-1。对于双向行走的机器人,此参数用于机器人停靠到点位时,是否允许尾部跟点位方向一致。 | 可选 | 1:允许; 0:不允许; 其他: 使用默认 | 0.8.7 |
| occupied_tolerance | 让步停靠距离参数,单位米。当目标点位被占用时,设置此参数机器人会直接在点位附近停靠以完成任务,而不再尝试移动到点位上。距离以占用物边缘至机器人中心计算。 | 可选 | [0.1, ) | 0.8.7 |
接下来我们在程序当中进行调用:
# demo9
def move_chassis(client, marker):move_command = f'/api/move?marker={marker}'client.send(move_command.encode('utf-8'))chassis_receive_data = client.recv(1024)print("++++++++")response = client.recv(1024).decode()print("Response:", response)data = json.loads(response)move_code = data.get("code")# time.sleep(10)while True:response = client.recv(1024).decode()print("Response:", response)data = json.loads(response)move_code = data.get("code")if move_code == "01002":print("Move completed successfully.")time.sleep(1)break
这段代码主要是与底盘建立连接以及参数的的编写,循环监听返回的状态码来进行到位信息的判断。
在主函数当中调用的代码如下:
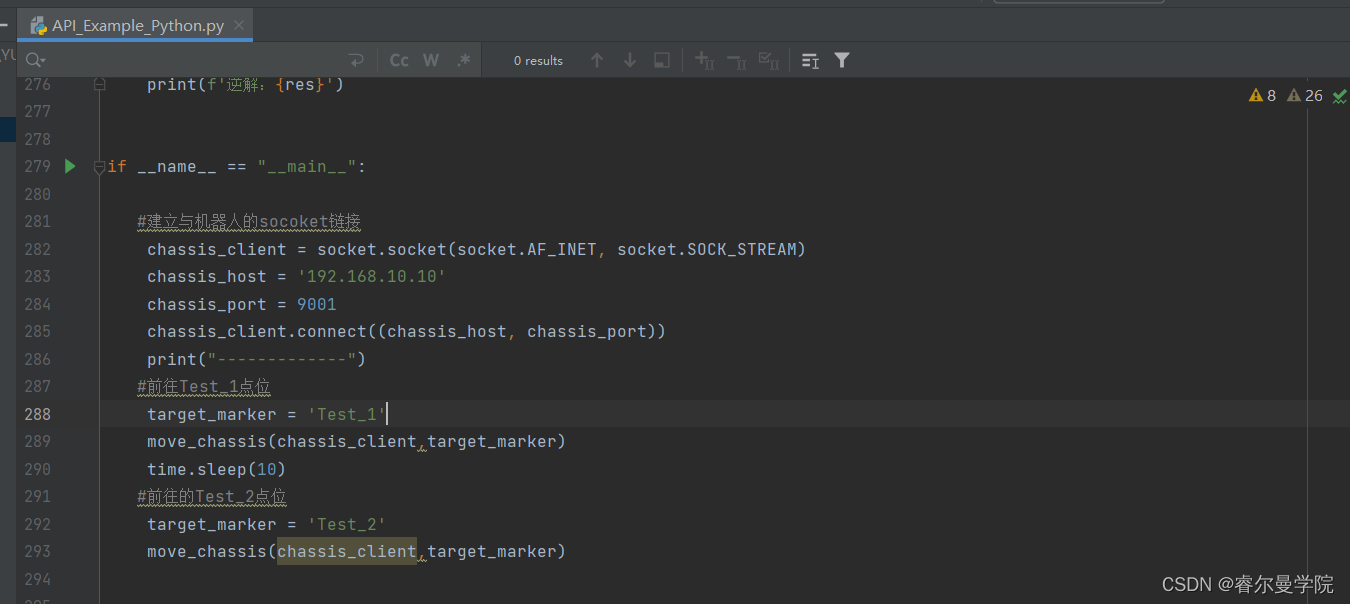
#建立与机器人的socoket链接chassis_client = socket.socket(socket.AF_INET, socket.SOCK_STREAM)chassis_host = '192.168.10.10'chassis_port = 9001chassis_client.connect((chassis_host, chassis_port))print("-------------")#前往Test_1点位target_marker = 'Test_1'move_chassis(chassis_client,target_marker)time.sleep(10)#前往的Test_2点位target_marker = 'Test_2'move_chassis(chassis_client,target_marker)
这里,我们建立了与底盘的链接以及调用了两个点位具体内容如上程序所示。
相关文章:
睿尔曼超轻量仿人机械臂之复合机器人底盘介绍及接口调用
机器人移动平台是一个包含完整成熟的感知、认知和定位导航能力的轮式机器人底盘产品级平台,产品致力于为各行业细分市场的商用轮式服务机器人提供一站式移动机器人解决方案,让合作伙伴专注在核心业务/人机交互的实现。以下是我司产品双臂机器人以及复合升…...

用JSch实现远程传输文件并打包成jar
本文将简单介绍一下 JSch 这个Java的第三方库的一个简单用法,并以此为实例,讲解 IntelliJ 中打包成 jar 包的2种方式。 实现目标 我们的目标是,做出一个jar包,它能够实现类似于 scp 命令的远程传输文件的功能。用法如下…...

2023年第十四届蓝桥杯大赛软件类省赛C/C++研究生组真题(代码完整题解)
C题-翻转⭐ 标签:贪心 简述:如果 S 中存在子串 101 或者 010,就可以将其分别变为 111 和 000,操作可以无限重复。最少翻转多少次可以把 S 变成和 T 一样。 链接: 翻转 思路:要求步骤最少->S每个位置最多修改一次->从头开始遍历不匹配就翻转->翻转不了就-1 …...
力扣刷题Days28-第二题-11.盛水最多的容器(js)
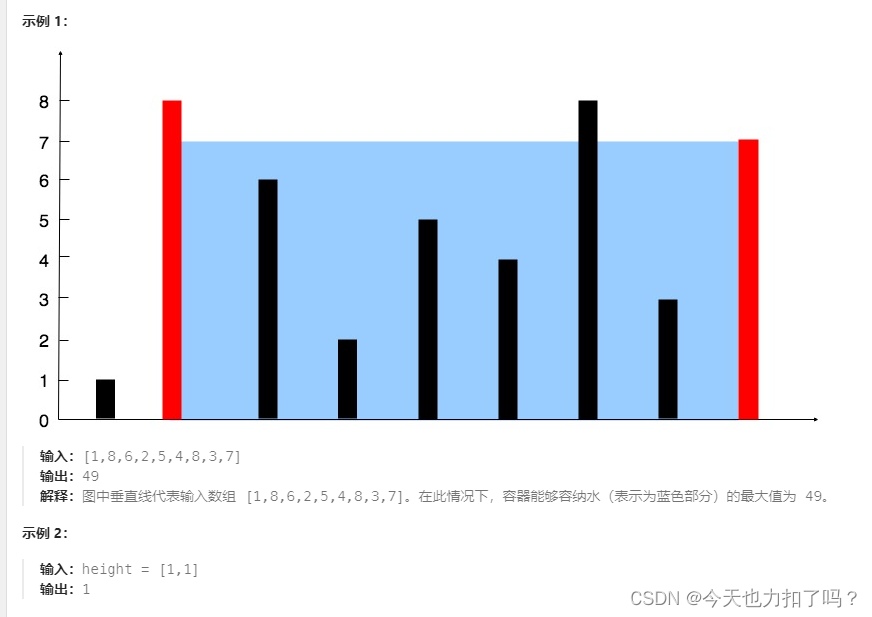
目录 1,题目 2,代码 3,学习与总结 3.1思路回顾 1,如何遍历 2,算法流程 3.2剖析问题 1,题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, h…...
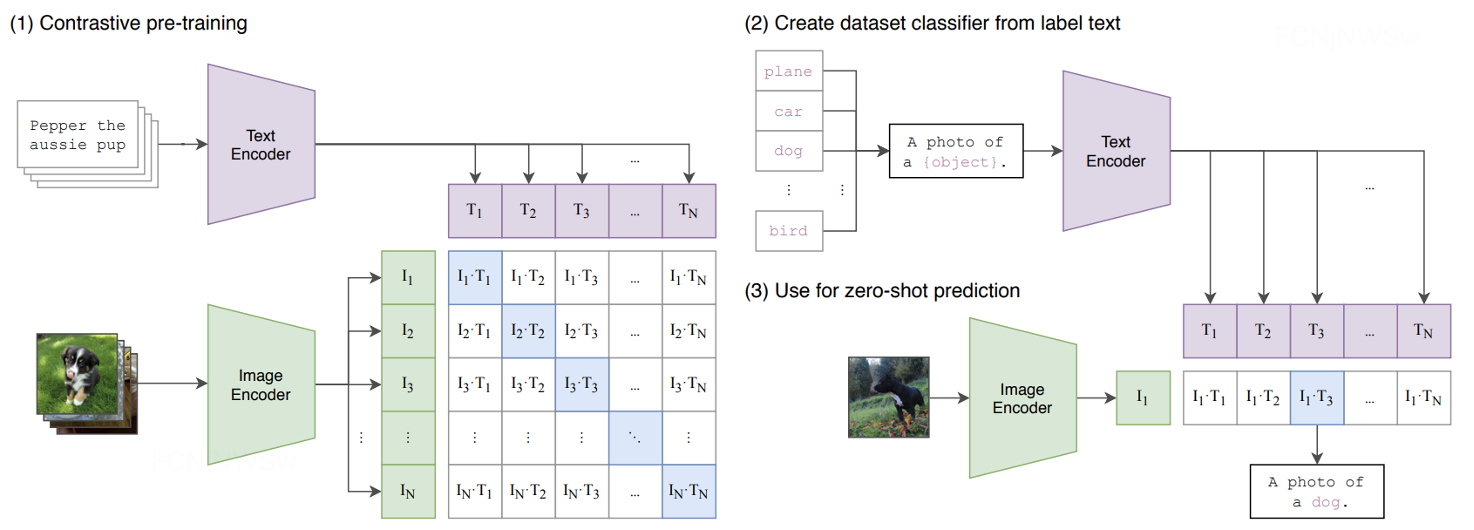
文生图大模型三部曲:DDPM、LDM、SD 详细讲解!
1、引言 跨模态大模型是指能够在不同感官模态(如视觉、语言、音频等)之间进行信息转换的大规模语言模型。当前图文跨模态大模型主要有: 文生图大模型:如 Stable Diffusion系列、DALL-E系列、Imagen等 图文匹配大模型:如CLIP、Chinese CLIP、…...
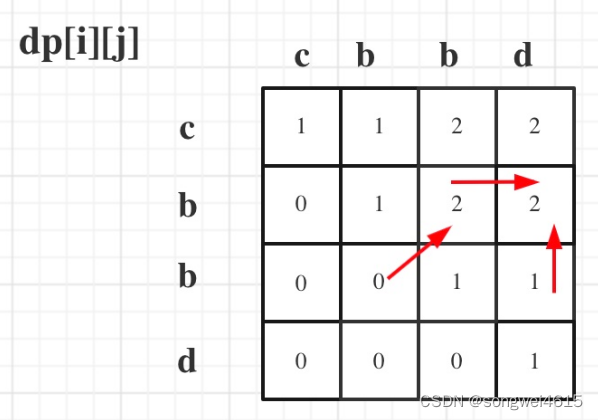
算法学习——LeetCode力扣动态规划篇10(583. 两个字符串的删除操作、72. 编辑距离、647. 回文子串、516. 最长回文子序列)
算法学习——LeetCode力扣动态规划篇10 583. 两个字符串的删除操作 583. 两个字符串的删除操作 - 力扣(LeetCode) 描述 给定两个单词 word1 和 word2 ,返回使得 word1 和 word2 相同所需的最小步数。 每步 可以删除任意一个字符串中的一个…...
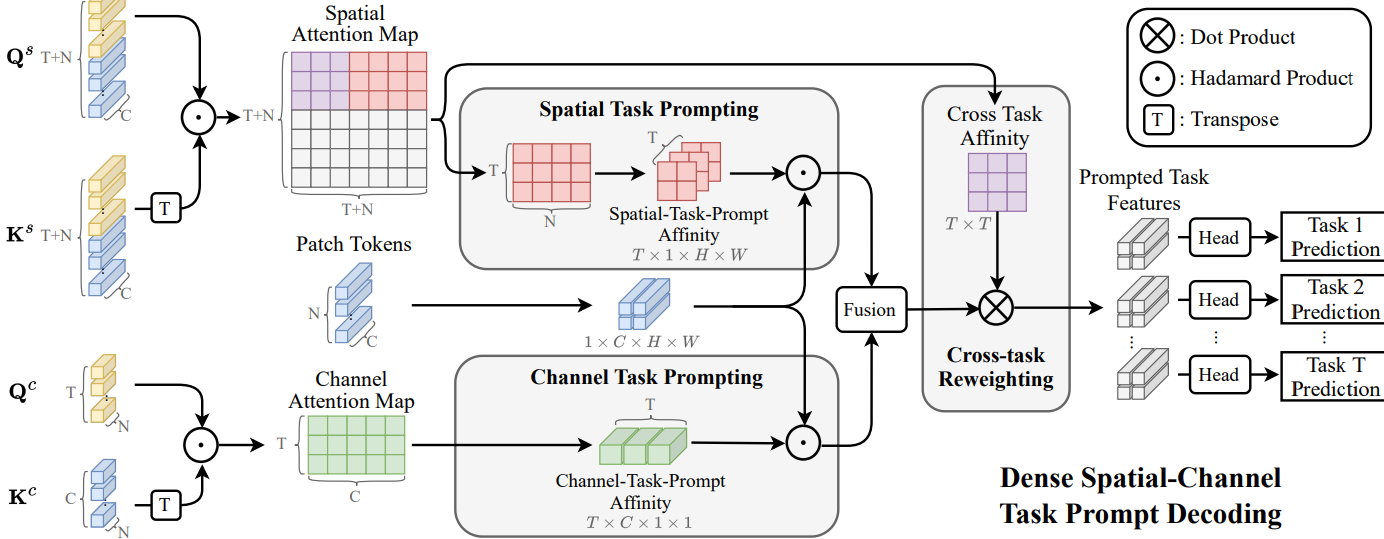
TASKPROMPTER
baseline模型的预训练权重就有1.6G! 多吓人呐,当时我就暂停下载了,不建议复现...

C之易错注意点转义字符,sizeof,scanf,printf
目录 前言 一:转义字符 1.转义字符顾名思义就是转换原来意思的字符 2.常见的转义字符 1.特殊\b 2. 特殊\ddd和\xdd 3.转义字符常错点----计算字符串长度 注意 : 如果出现\890,\921这些的不是属于\ddd类型的,,不是一个字符…...
)
等级保护测评无补偿因素的高风险安全问题判例(共23项需整改)
层面 控制点 要求项 安全问题 适用范围 充分条件 整改建议简要 安全物理环境 基础设施位置 应保证云计算基础设施位于中国境内 1.云计算基础设施物理位置不当 二级及以上 相关基础设施不在中国境内 云平台相关基础设施在中国境内部署 安全通信网络 网络架构 应…...

JavaScript笔记 09
目录 01 DOM操作事件的体验 02 获取元素对象的五种方式 03 事件中this指向问题 04循环绑定事件 05 DOM节点对象的常用操作 06 点亮盒子的案例 07 节点访问关系 08 设置和获取节点内容的属性 09 以上内容的小总结 01 DOM操作事件的体验 js本身是受事件驱动的脚本语言 什…...

操作教程|在MeterSphere中通过SSH登录服务器的两种方法
MeterSphere开源持续测试平台拥有非常强大的插件集成机制,用户可以通过插件实现平台能力的拓展,借助插件或脚本实现多种功能。在测试过程中,测试人员有时需要通过SSH协议登录至服务器,以获取某些配置文件和日志文件,或…...

Swashbuckle.AspNetCore介绍
使用 ASP.NET Core 构建的 API 的 Swagger 工具。直接从您的路由、控制器和模型生成精美的 API 文档,包括用于探索和测试操作的 UI。 除了 Swagger 2.0 和 OpenAPI 3.0 生成器外,Swashbuckle 还提供了由生成的 Swagger JSON 提供支持的令人敬畏的 swagg…...

【Spring】通过Spring收集自定义注解标识的方法
文章目录 前言1. 声明注解2. 使用 Spring 的工厂拓展3. 收集策略4. 完整的代码后记 前言 需求: 用key找到对应的方法实现。使用注解的形式增量开发。 MyComponent public class Sample1 {MyMethod(key "key1")public String test2() {return "She…...

基于深度学习的图书管理推荐系统(python版)
基于深度学习的图书管理推荐系统 1、效果图 1/1 [] - 0s 270ms/step [13 11 4 19 16 18 8 6 9 0] [0.1780757 0.17474999 0.17390694 0.17207369 0.17157653 0.168248440.1668652 0.16665359 0.16656876 0.16519257] keras_recommended_book_ids深度学习推荐列表 [9137…...
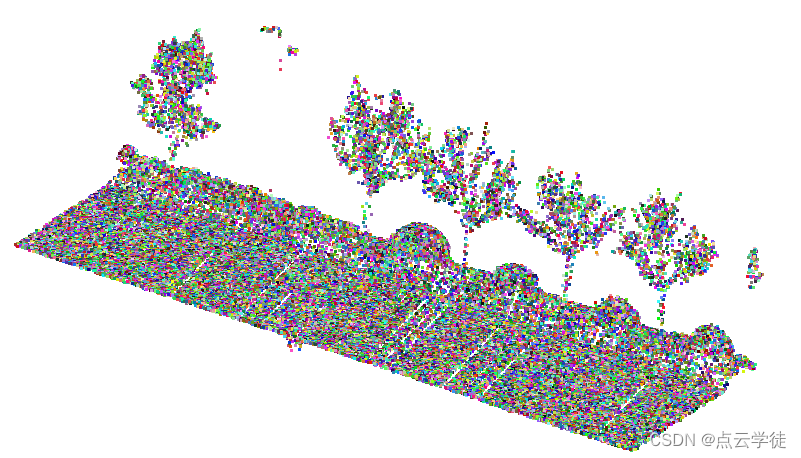
MATLAB 点云随机渲染赋色(51)
MATLAB 点云随机渲染赋色(51) 一、算法介绍二、算法实现1.代码2.效果总结一、算法介绍 为点云中的每个点随机赋予一种颜色,步骤和效果如图: 1、读取点云 (ply格式) 2、随机为每个点的RGB颜色字段赋值 3、保存结果 (ply格式) 二、算法实现 1.代码 代码如下(示例):…...

通过一篇文章让你完全掌握VS和电脑常用快捷键的使用方法
VS常用快捷键 前言一、 VS常用快捷键常用VS运行调试程序快捷键常用VS编辑程序快捷键 二、常用windows系统操作快捷键 前言 VS(Visual Studio)是一款强大的开发工具,提供了许多常用快捷键,以提高开发效率。这些快捷键包括文件操作…...

ChatGPT指引:借助ChatGPT撰写学术论文的技巧
ChatGPT无限次数:点击直达 ChatGPT指引:借助ChatGPT撰写学术论文的技巧 在当今信息技术高度发达的时代,人工智能技术的不断发展为学术研究者提供了更多的便利和可能。其中,自然语言处理技术中的ChatGPT无疑是一种强大的工具,它能…...
魔改一个过游戏保护的CE
csdn审核不通过 网易云课堂有配套的免费视频 int0x3 - 主页 文章都传到github了 Notes/外挂/魔改CE at master MrXiao7/Notes GitHub 为什么要编译自己的CE 在游戏逆向的过程中,很多游戏有保护,我们运行原版CE的时候会被检测到 比如我们开着CE运…...

rust嵌入式开发之await
嵌入式经常有类似通过串口发送指令然后等待响应再做出进一步反应的需求。比如,通过串口以AT命令来操作蓝牙模块执行扫描、连接,需要根据实际情况进行操作,复杂的可能需要执行7、8条指令才能完成连接。 对于这样的需求,如果用异步…...

UE4_碰撞_碰撞蓝图节点——Line Trace For Objects(对象的线条检测)
一、Line Trace For Objects(对象的线条检测):沿给定线条执行碰撞检测并返回遭遇的首个命中,这只会找到由Object types指定类型的对象。注意他与Line Trace By Channel(由通道检测线条)的区别,一个通过Obje…...

Azure流分析快速入门:构建实时数据处理管道的完整指南 [特殊字符]
Azure流分析快速入门:构建实时数据处理管道的完整指南 🚀 【免费下载链接】azure-quickstart-templates Azure Quickstart Templates 项目地址: https://gitcode.com/gh_mirrors/az/azure-quickstart-templates Azure流分析是微软提供的实时数据分…...

Perplexity无法解析Springer LaTeX公式?2024.06最新MathJax兼容补丁+3类数学文献精准摘要生成术
更多请点击: https://intelliparadigm.com 第一章:Perplexity解析Springer文献的底层机制与失效归因 Perplexity 作为衡量语言模型预测能力的关键指标,在学术文献解析场景中常被误用为“质量代理”,尤其在处理 Springer 出版集团…...

VSCode写Verilog效率翻倍:除了语法检查,再教你用Python插件自动生成模块例化
VSCode写Verilog效率翻倍:Python插件自动化实战指南 在FPGA开发中,Verilog代码的重复性劳动往往消耗工程师大量时间。我曾在一个图像处理项目中被模块例化折磨得焦头烂额——手动编写30多个相同结构的FIFO例化代码,不仅容易出错,后…...

数据中台下半场比的是治理:六家主流厂商四维度横向测评
一、数据治理:决定数据中台价值兑现的关键变量2026年,一个行业的共识正在变得清晰:数据中台的上限由计算架构决定,但下限由数据治理决定。过去数年,大量企业投入资源搭建了数据中台的基础设施——数据湖、数仓、调度引…...

如何将Claude Code的配置无缝迁移至Taotoken平台以解决封号困扰
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何将Claude Code的配置无缝迁移至Taotoken平台以解决封号困扰 Claude Code 作为一款高效的编程助手,其核心能力依赖于…...

别再被FFmpeg里的12bpp搞懵了!手把手教你理解YUV420sp与BPP的关系
别再被FFmpeg里的12bpp搞懵了!手把手教你理解YUV420sp与BPP的关系 第一次在FFmpeg文档里看到"12bpp"这个描述时,我盯着屏幕愣了半天——RGB24格式不是8bpp吗?YUV420不是应该更节省空间吗?怎么反而变成了12bpp࿱…...

基于大语言模型的银行对账单自动化分析与财务预测实战
1. 项目概述:当大语言模型遇上个人财务分析最近在GitHub上看到一个挺有意思的项目,叫“AI银行对账单文档自动化与个人财务分析预测”。光看这个标题,就能感觉到一股浓浓的“技术赋能生活”的味道。简单来说,这个项目想干的事儿&am…...

3分钟掌握Word转HTML:Mammoth.js让你的文档转换变得如此简单
3分钟掌握Word转HTML:Mammoth.js让你的文档转换变得如此简单 【免费下载链接】mammoth.js Convert Word documents (.docx files) to HTML 项目地址: https://gitcode.com/gh_mirrors/ma/mammoth.js 在现代办公和内容管理中,Word转HTML的需求无处…...

那些“假装很忙”的员工,正成为中小企业老板最大的管理黑洞
作为一名常年给企业做数字化诊断的顾问,我发现很多老板都有一个共同的“心病”:走进办公室,满屋子都是噼里啪啦的打字声,每个人看起来都在埋头苦干,但一到交付节点,进度总是莫名其妙地卡壳。这种“办公室伪…...

如何快速搭建AI聊天前端:SillyTavern完整教程与角色扮演系统指南
如何快速搭建AI聊天前端:SillyTavern完整教程与角色扮演系统指南 【免费下载链接】SillyTavern LLM Frontend for Power Users. 项目地址: https://gitcode.com/GitHub_Trending/si/SillyTavern 想象一下,你能够与任何AI角色进行沉浸式对话&#…...