Yolov5封装detect.py面向对象
主要目标是适应摄像头rtsp流的检测
如果是普通文件夹或者图片,run中的while True去掉即可。
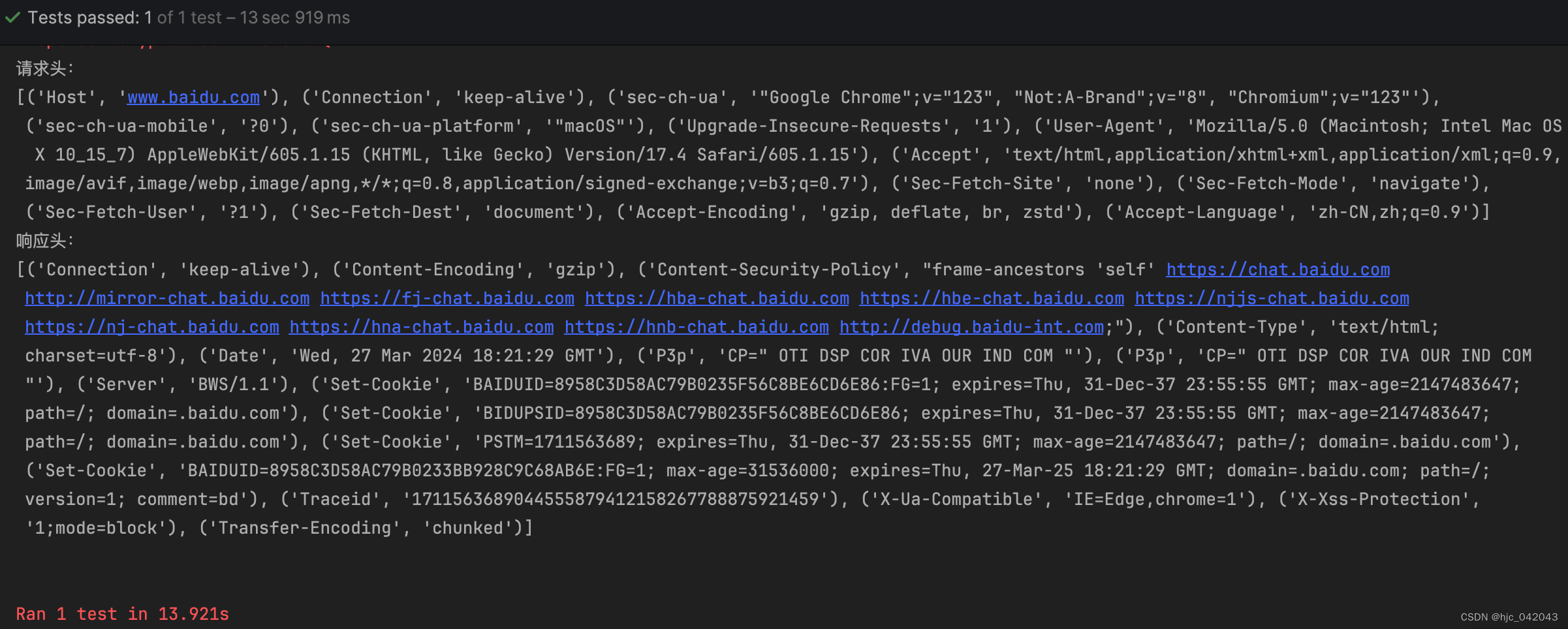
web_client是根据需求创建的客户端,将检测到的数据打包发送给服务器
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
"""
Run inference on images, videos, directories, streams, etc.Usage:$ python path/to/detect.py --source path/to/img.jpg --weights yolov5s.pt --img 640
"""import argparse
import json
import os
import sys
import time
import moment
from pathlib import Pathimport cv2
import numpy as np
import torch
import torch.backends.cudnn as cudnnFILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # YOLOv5 root directory
if str(ROOT) not in sys.path:sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relativefrom models.experimental import attempt_load
from utils.datasets import LoadImages, LoadStreams
from utils.general import apply_classifier, check_img_size, check_imshow, check_requirements, check_suffix, colorstr, \increment_path, non_max_suppression, print_args, save_one_box, scale_coords, set_logging, \strip_optimizer, xyxy2xywh
from utils.plots import Annotator, colors
from utils.torch_utils import load_classifier, select_device, time_syncfrom mytools import read_yaml_all, base64_encode_img
from message_base import MessageBase
from websocket_client import WebClientclass Detect:def __init__(self, config: dict, client: WebClient):self.config = configself.weights = self.config.get("weights") # weights pathself.source = self.config.get("source") # source self.imgsz = self.config.get("imgsz") # imgszself.conf_thres = self.config.get("conf_thres")self.iou_thres = self.config.get("iou_thres")self.max_det = self.config.get("max_det")self.device = self.config.get("device") # "cpu" or "0,1,2,3"self.view_img = self.config.get("view_img") # show resultsself.save_txt = self.config.get("save_txt") # save results to *.txtself.save_conf = self.config.get("save_conf") # save confidences in --save-txt labelsself.save_crop = self.config.get("save_crop") # save cropped prediction boxesself.nosave = self.config.get("nosave") # do not save images/videosself.classes = self.config.get("classes") # filter by class: --class 0, or --class 0 2 3self.agnostic_nms = self.config.get("agnostic_nms") # class-agnostic NMSself.augment = self.config.get("augment") # augmented inferenceself.visualize = self.config.get("visualize") # visualize featuresself.update = self.config.get("update") # update all modelsself.save_path = self.config.get("save_path") # save results to project/nameself.line_thickness = self.config.get("line_thickness") # bounding box thickness (pixels)self.hide_labels = self.config.get("hide_labels") # hide labelsself.hide_conf = self.config.get("hide_conf") # hide confidencesself.half = self.config.get("half") # use FP16 half-precision inferenceself.dnn = self.config.get("dnn") # use OpenCV DNN for ONNX inferenceself.func_device = self.config.get("func_device") # 对应功能的设备名字self.save_img = not self.nosave and not self.source.endswith('.txt') # save inference imagesself.webcam = self.source.isnumeric() or self.source.endswith('.txt') or self.source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://'))set_logging()self.device = select_device(self.device)self.half = self.device.type != 'cpu' # half precision only supported on CUDAself.model = attempt_load(self.weights, map_location=self.device)self.imgsz = check_img_size(self.imgsz, s=int(self.model.stride.max()))self.stride = int(self.model.stride.max())self.names = self.model.module.names if hasattr(self.model, 'module') else self.model.names# 获取数据if self.webcam:self.view_img = check_imshow()cudnn.benchmark = True # set True to speed up constant image size inferenceself.dataset = LoadStreams(self.source, img_size=self.imgsz, stride=self.stride, auto=True)self.bs = len(self.dataset) # batch_sizeelse:self.dataset = LoadImages(self.source, img_size=self.imgsz, stride=self.stride, auto=True)self.bs = 1 # batch_sizeself.client = client # 客户端self.last_time = moment.now()self.check_time_step = 5 # 每隔多少时间检测一次os.mkdir(self.save_path) if not os.path.exists(self.save_path) else Nonedef inference(self, img):img = torch.from_numpy(img).to(self.device)img = img.half() if self.half else img.float() # uint8 to fp16/32img /= 255.0 # 0 - 255 to 0.0 - 1.0if img.ndimension() == 3:img = img.unsqueeze(0)pred = self.model(img, augment=self.augment)[0]# NMSpred = non_max_suppression(pred, self.conf_thres, self.iou_thres,self.classes, self.agnostic_nms, max_det=self.max_det)return preddef process(self, im0s, img, pred, path):for i, det in enumerate(pred): # per imageif self.webcam: # batch_size >= 1p, s, im0, frame = path[i], f'{i}: ', im0s[i].copy(), self.dataset.countelse:p, s, im0, frame = path, '', im0s.copy(), getattr(self.dataset, 'frame', 0)p = Path(p) # to Pathtxt_path = str(self.save_path + "/" + 'labels' + "/" + p.stem) + ('' if self.dataset.mode == 'image' else f'_{frame}') # img.txts += '%gx%g ' % img.shape[2:] # print stringgn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwhimc = im0.copy() if self.save_crop else im0 # for save_cropannotator = Annotator(im0, line_width=self.line_thickness, example=str(self.names))if len(det):# Rescale boxes from img_size to im0 sizedet[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()# Print resultsfor c in det[:, -1].unique():n = (det[:, -1] == c).sum() # detections per classs += f"{n} {self.names[int(c)]}{'s' * (n > 1)}, " # add to string# Write resultsfor *xyxy, conf, cls in reversed(det):c = int(cls)label = self.names[c]# if label == "person":if label: # 根据对应标签做处理# annotator.box_label(xyxy, label, color=colors(c, True)) # 画框t = int(time.time())img_path = f"{self.save_path}/{self.func_device}_{label}_{t}.jpg"crop = save_one_box(xyxy, imc, img_path, BGR=True)x1, y1, x2, y2 = int(xyxy[0]), int(xyxy[1]), int(xyxy[2]), int(xyxy[3])data = {"device": self.func_device,"value": {"label": label,"time": t,"locate": (x1, y1, x2, y2),"crop": base64_encode_img(crop)}}data = json.dumps(data) # 打包数据try:self.client.send(data) # 客户端发送数据passexcept Exception as err:print("发送失败:", err)self.client.connect()self.client.send(data)print("重连成功!")print(data)# if self.save_txt: # Write to file# xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(# -1).tolist() # normalized xywh# line = (cls, *xywh, conf) if self.save_conf else (cls, *xywh) # label format# with open(txt_path + '.txt', 'a') as f:# f.write(('%g ' * len(line)).rstrip() % line + '\n')# 画框# if self.save_img or self.save_crop or self.view_img: # Add bbox to image# c = int(cls) # integer class# label = None if self.hide_labels else (self.names[c] if self.hide_conf else# f'{self.names[c]} {conf:.2f}')# annotator.box_label(xyxy, label, color=colors(c, True))def run(self):self.client.connect()while True:for path, img, im0s, vid_cap in self.dataset:if self.last_time.__lt__(moment.now()):self.last_time = moment.now().add(seconds=self.check_time_step)try:pred = self.inference(img)self.process(im0s, img, pred, path) except Exception as err:print(err)if self.save_txt or self.save_img:s = f"\n{len(list(self.save_path.glob('labels/*.txt')))} labels saved to {self.save_path / 'labels'}" if self.save_txt else ''print(f"Results saved to {colorstr('bold', self.save_path)}{s}")if self.update:strip_optimizer(self.weights) # update model (to fix SourceChangeWarning)if __name__ == "__main__":message_base = MessageBase()wc = WebClient("192.168.6.28", 8000)configs = read_yaml_all("yolo_configs.yaml")config = read_yaml_all("configs.yaml")device_name = config.get("DEVICE_LIST")[0]device_source = config.get("RTSP_URLS").get(device_name)configs["source"] = device_sourceconfigs["func_device"] = device_nameprint(configs)detect = Detect(configs, wc)detect.run()
相关文章:

Yolov5封装detect.py面向对象
主要目标是适应摄像头rtsp流的检测 如果是普通文件夹或者图片,run中的while True去掉即可。 web_client是根据需求创建的客户端,将检测到的数据打包发送给服务器 # YOLOv5 🚀 by Ultralytics, GPL-3.0 license """ Run inf…...

入门级深度学习主机组装过程
一 配置 先附上电脑配置图,如下: 利用公司的办公电脑对配置进行升级改造完成。除了显卡和电源,其他硬件都是公司电脑原装。 二 显卡 有钱直接上 RTX4090,也不能复用公司的电脑,其他配置跟不上。 进行深度学习&…...
python爬虫之selenium4使用(万字讲解)
文章目录 一、前言二、selenium的介绍1、优点:2、缺点: 三、selenium环境搭建1、安装python模块2、selenium4新特性3、安装驱动WebDriver驱动选择驱动安装和测试 基础操作1、属性和方法2、单个元素定位通过id定位通过class_name定位一个元素通过xpath定位…...

【ARM 嵌入式 C 头文件系列 22 -- 头文件 stdint.h 介绍】
请阅读【嵌入式开发学习必备专栏 】 文章目录 C 头文件 stdint.h定长整数类型最小宽度整数类型最快最小宽度整数类型整数指针类型最大整数类型 C 头文件 stdint.h 在 C 语言中,头文件 <stdint.h> 是 C99 标准的一部分,旨在提供一组明确的整数类型…...
LabVIEW专栏三、探针和断点
探针和断点是LabVIEW调试的常用手段,该节以上一节的"测试耗时"为例 探针可以打在有线条的任何地方,打上后,经过这条线的所有最后一次的数值都会显示在探针窗口。断点可以打在程序框图的所有G代码对象,包括结构…...
Transformer模型-softmax的简明介绍
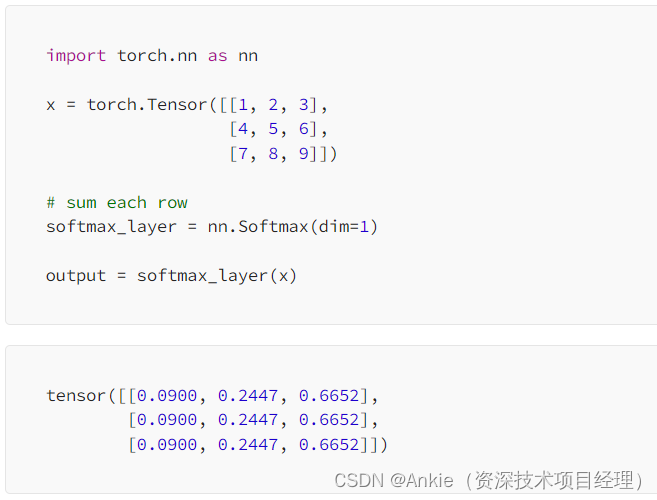
今天介绍transformer模型的softmax softmax的定义和目的: softmax:常用于神经网络的输出层,以将原始的输出值转化为概率分布,从而使得每个类别的概率值在0到1之间,并且所有类别的概率之和为1。这使得Softmax函数特别适…...

记录一下做工厂的打印pdf程序
功能:在网页点击按钮调起本地的打印程序 本人想到的就是直接调起方式,网上大佬们说用注册表的形式来进行。 后面想到一种,在电脑开机时就开启,并在后台运行,等到有人去网页里面进行触发,这时候就有个问题&a…...
Linux网络编程一(协议、TCP协议、UDP、socket编程、TCP服务器端及客户端)
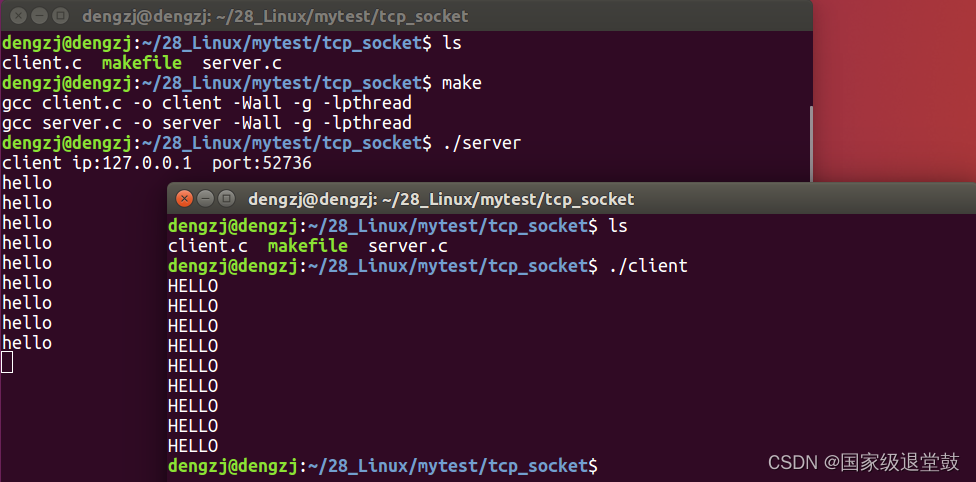
文章目录 协议1、分层模型结构2、网络应用程序设计模式3、ARP协议4、IP协议5、UDP协议6、TCP协议 Socket编程1、网络套接字(socket)2、网络字节序3、IP地址转换4、一系列函数5、TCP通信流程分析 第二次更新,自己再重新梳理一遍… 协议 协议:指一组规则&…...
Python读取Excel根据每行信息生成一个PDF——并自定义添加文本,可用于制作准考证
文章目录 有点小bug的:最终代码(无换行):有换行最终代码无bug根据Excel自动生成PDF,目录结构如上 有点小bug的: # coding=utf-8 import pandas as pd from reportlab.pdfgen import canvas from reportlab.lib.pagesizes import letter from reportlab.pdfbase import pdf…...

http: server gave HTTP response to HTTPS client 分析一下这个问题如何解决中文告诉我详细的解决方案
这个错误信息表明 Docker 客户端在尝试通过 HTTPS 协议连接到 Docker 仓库时,但是服务器却返回了一个 HTTP 响应。这通常意味着 Docker 仓库没有正确配置为使用 HTTPS,或者客户端没有正确配置以信任仓库的 SSL 证书。以下是几种可能的解决方案࿱…...
Flume学习笔记
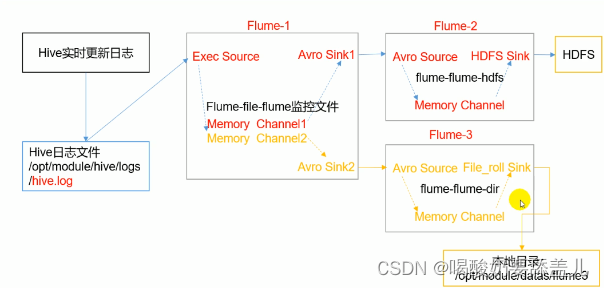
视频地址:https://www.bilibili.com/video/BV1wf4y1G7EQ/ 定义 Flume是一个高可用的、高可靠的、分布式的海量日志采集、聚合和传输的系统。 Flume高最要的作用就是实时读取服务器本地磁盘的数据,将数据写入HDFS。 官网:https://flume.apache.org/releases/content/1.9.0/…...
数据库系统概论(超详解!!!) 第三节 关系数据库标准语言SQL(Ⅳ)
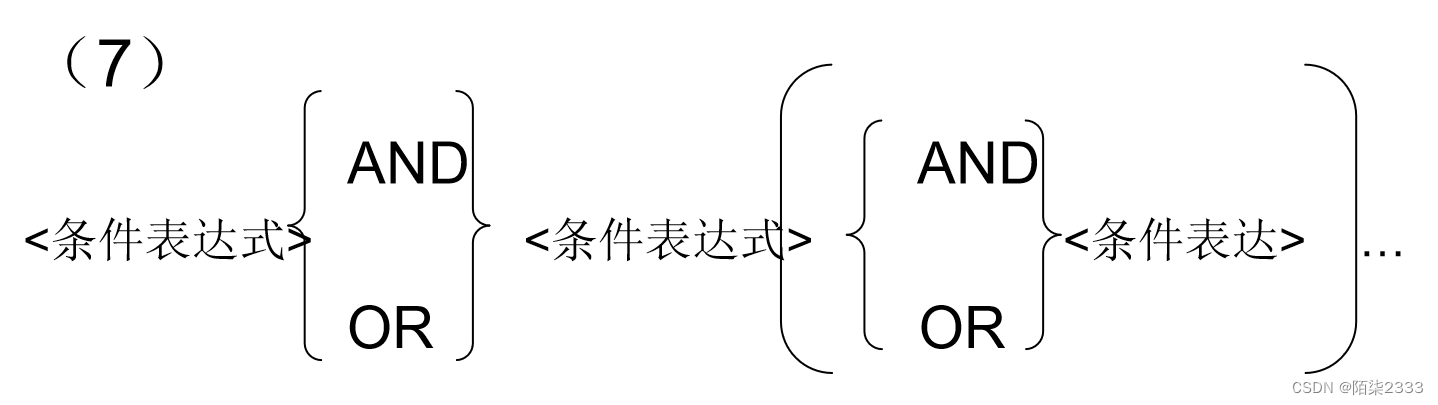
1.集合查询 集合操作的种类 并操作UNION 交操作INTERSECT 差操作EXCEPT 参加集合操作的各查询结果的列数必须相同;对应项的数据类型也必须相同 查询计算机科学系的学生及年龄不大于19岁的学生。SELECT *FROM StudentWHERE Sdept CSUNIONSELECT *FROM StudentWHERE Sage&l…...

与谷歌“分家”两年后,SandboxAQ推出统一加密管理平台
3月27日,SandboxAQ宣布其AQtive Guard平台现已全面可用(GA),适用于所有行业,以防范人工智能驱动和量子攻击的威胁。前者是在两年前3月从谷歌母公司Alphabet分拆出来的初创公司,并在当时获得了“九位数”的融…...
【卫星家族】 | 高分六号卫星影像及获取
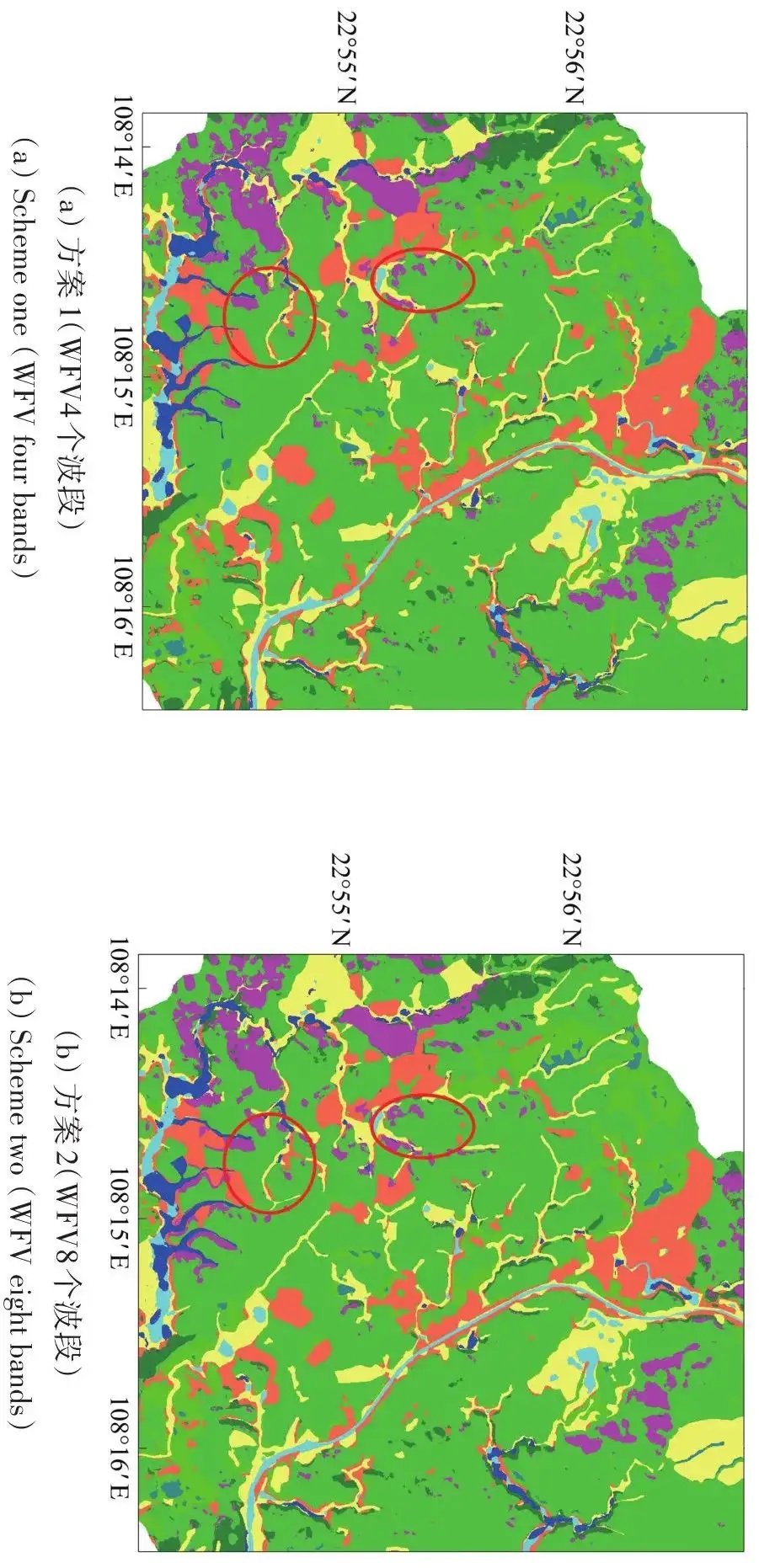
1. 卫星简介 高分六号卫星(GF-6)于2018年6月2日在酒泉卫星发射中心成功发射,是高分专项中的一颗低轨光学遥感卫星,也是我国首颗精准农业观测的高分卫星,具有高分辨率、宽覆盖、高质量成像、高效能成像、国产化率高等特…...

XML与Xpath
XML与Xpath XML是一种具有某种层次结构的文件,Xpath则是解析这种文件的工具 接下来将会解释XML文件的结构和Xpath的基本使用,并且用Java语言进行操作展示。 XML结构 XML(可扩展标记语言)文件具有一种层次结构,由标签…...

【c++20】CPP-20-STL-Cookbook 学习笔记
Cpp20-STL-Cookbook-src简单的阅读笔记。c++20更好用了,比如STL 包含了一些这样的辅助函数,比如 make_pair() 和make_tuple() 等。 这些代码现在已经过时了,但是为了与旧代码兼容,会保留这些代码。比如 可以声明是一个std的string:Sum s1 {1u, 2.0, 3, 4.0f }?...

Python 之 Flask 框架学习
毕业那会使用过这个轻量级的框架,最近再来回看一下,依赖相关的就不多说了,直接从例子开始。下面示例中的 html 模板,千万记得要放到 templates 目录下。 Flask基础示例 hello world from flask import Flask, jsonify, url_fora…...
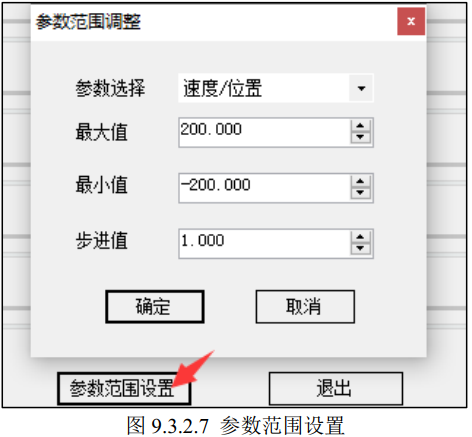
精品丨PowerBI负载测试和容量规划
当选择Power BI作为业务报表平台时,如何判断许可证的选择是否符合业务需求,价格占了主导因素。 Power BI的定价是基于SKU和服务器内核决定的,但是很多IT的负责人都不确定自己公司业务具体需要多少。 不幸的是,Power BI的容量和预期…...
【算法-PID】
算法-PID ■ PID■ 闭环原理■ PID 控制流程■ PID 比例环节(Proportion)■ PID 积分环节(Integral)■ PID 微分环节(Differential) ■ 位置式PID,增量式PID介绍■ 位置式 PID 公式■ 增量式 PI…...
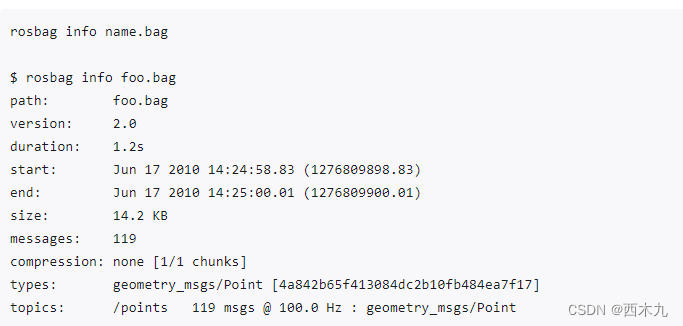
ros rosbag使用记录
rosbag: 1. rosbag record -a 记录当前所有消息(较少用)2. rosbag record -O bag_name.bag /topic 记录指定消息3. rosbag info 查阅bag文件信息4. rosbag play 播放bag文件内容5. python script 查看bag文件内容参考: 1. rosbag record -a 记…...

Skill Library:AI智能体技能库的模块化设计与工程实践
1. 项目概述:一个为AI智能体打造的“技能武器库”如果你和我一样,每天都在和Claude、ChatGPT、Cursor这些AI工具打交道,那你肯定也经历过这样的时刻:想让AI帮你写个复杂的SQL查询、设计一个微服务架构,或者起草一份产品…...

Zotero茉莉花插件:3大功能轻松管理中文文献,科研效率翻倍提升
Zotero茉莉花插件:3大功能轻松管理中文文献,科研效率翻倍提升 【免费下载链接】jasminum A Zotero add-on to retrive CNKI meta data. 一个简单的Zotero 插件,用于识别中文元数据 项目地址: https://gitcode.com/gh_mirrors/ja/jasminum …...
)
003-VXLAN集中式网关实验(命令详解版)
VXLAN集中式网关实验1(命令详解版)最近有读者私信说刚开始学习VXLAN,实战技巧薄弱、部分命令不是很理解,想循序渐进通过实验过渡到真实项目案例。下面从一个简单的集中式网关实验开始,通过2个基础实验和1个项目实验完成…...

Gemini实时字幕在Google Meet中延迟超800ms?揭秘谷歌内部SRE监控数据与3步毫秒级调优法
更多请点击: https://intelliparadigm.com 第一章:Gemini实时字幕在Google Meet中延迟超800ms?揭秘谷歌内部SRE监控数据与3步毫秒级调优法 谷歌内部SRE团队近期公开的一组匿名化监控数据显示:在高并发(>500人&…...

Cesium三维地形剖切与开挖:从原理到可复用组件封装
1. 为什么需要地形剖切与开挖功能? 在三维地理信息系统中,地形剖切与开挖是最常用的分析功能之一。想象一下,你正在规划一条地下隧道,或者需要分析某处地质构造,这时候如果能把地表"切开"查看内部情况&#…...
:支持128K上下文+动态摘要锚点+引用溯源追踪)
大模型长文档理解新拐点已至(2026年Claude专项能力解密):支持128K上下文+动态摘要锚点+引用溯源追踪
更多请点击: https://intelliparadigm.com 第一章:大模型长文档理解新拐点已至:Claude 2026能力演进全景图 随着长上下文窗口突破200万token、原生支持跨页语义锚定与结构化元数据感知,Claude 2026标志着大模型对长文档的理解正式…...

Windows 11系统优化深度指南:使用Win11Debloat实现高效系统清理与性能提升
Windows 11系统优化深度指南:使用Win11Debloat实现高效系统清理与性能提升 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes …...

Modbus文件读写功能码0x14与0x15:从协议解析到批量数据操作实战
1. Modbus文件读写功能码0x14与0x15基础解析 在工业自动化领域,Modbus协议就像设备之间的"普通话",而0x14和0x15这两个功能码则是专门用于文件读写的"方言"。想象一下,你需要从PLC读取生产配方,或者将设备配置…...

CATIA二次开发—API高效查询与架构解析
1. CATIA二次开发入门:从V5到V6的跨越挑战 如果你是从CATIA V5转向V6开发的工程师,可能会遇到这样的困惑:为什么在V5中得心应手的API调用方式,到了V6就完全不管用了?这就像突然从手动挡汽车换成了自动驾驶电动车&#…...

终极指南:League-Toolkit 如何彻底解决极地大乱斗抢英雄难题
终极指南:League-Toolkit 如何彻底解决极地大乱斗抢英雄难题 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit League-Toolkit 是一款…...