基于深度学习的钢材表面缺陷检测系统(网页版+YOLOv8/v7/v6/v5代码+训练数据集)
摘要:本文深入研究了基于YOLOv8/v7/v6/v5的钢材表面缺陷检测系统,核心采用YOLOv8并整合了YOLOv7、YOLOv6、YOLOv5算法,进行性能指标对比;详述了国内外研究现状、数据集处理、算法原理、模型构建与训练代码,及基于Streamlit的交互式Web应用界面设计。在Web网页中可以支持图像、视频和实时摄像头进行钢材表面缺陷检测,可上传不同训练模型(YOLOv8/v7/v6/v5)进行推理预测,界面可方便修改。本文附带了完整的网页设计、深度学习模型代码和训练数据集的下载链接。
文章目录
- 1. 网页功能与效果
- 2. 绪论
- 2.1 研究背景及意义
- 2.2 国内外研究现状
- 2.3 要解决的问题及其方案
- 2.3.1 要解决的问题
- 2.3.2 解决方案
- 2.4 博文贡献与组织结构
- 3. 数据集处理
- 4. 原理与代码介绍
- 4.1 YOLOv8算法原理
- 4.2 模型构建
- 4.3 训练代码
- 5. 实验结果与分析
- 5.1 训练曲线
- 5.2 PR曲线图
- 5.3 YOLOv8/v7/v6/v5对比实验
- 6. 系统设计与实现
- 6.1 系统架构概览
- 1. **数据处理模块**
- 2. **模型加载与配置模块**
- 3. **检测执行模块**
- 4. **检测结果处理模块**
- 5. **用户界面(UI)模块**
- 6.2 系统流程
- 代码下载链接
- 7. 结论与未来工作
➷点击跳转至文末所有涉及的完整代码文件下载页☇
网页版-基于深度学习的钢材表面缺陷检测系统(YOLOv8/v7/v6/v5+实现代码+训练数据集)
1. 网页功能与效果
(1)开启摄像头实时检测:本系统允许用户通过网页直接开启摄像头,实现对实时视频流中钢材表面缺陷的检测。系统将自动识别并分析画面中的钢材表面缺陷,并将检测结果实时显示在用户界面上,为用户提供即时的反馈。

(2)选择图片检测:用户可以上传本地的图片文件到系统中进行钢材表面缺陷检测。系统会分析上传的图片,识别出图片中的钢材表面缺陷,并在界面上展示带有钢材表面缺陷标签和置信度的检测结果,让用户能够清晰地了解到每个钢材表面缺陷状态。

(3)选择视频文件检测:系统支持用户上传视频文件进行钢材表面缺陷检测。上传的视频将被系统逐帧分析,以识别和标记视频中每一帧的钢材表面缺陷。用户可以观看带有钢材表面缺陷检测标记的视频,了解视频中钢材表面缺陷的变化。

(4)选择不同训练好的模型文件:系统集成了多个版本的YOLO模型(如YOLOv8/v7/v6/v5),用户可以根据自己的需求选择不同的模型进行钢材表面缺陷检测。这一功能使得用户能够灵活地比较不同模型的表现,以选择最适合当前任务的模型。

在我们的系统中,实时摄像头检测功能允许用户简单点击一个按钮即可开启摄像头进行实时的钢材表面缺陷检测,系统将实时分析捕获的画面,并即时显示检测结果,使得用户能够在无需预处理的情况下快速获得结果。
接下来,我们提供了选择图片进行检测和选择视频文件检测的功能,用户可以上传本地的图片或视频文件至系统中,系统将逐帧分析这些媒体内容,并展示每一帧的钢材表面缺陷检测结果。这一功能不仅提高了系统的灵活性,也让用户能够对存档的媒体文件进行后期分析。为了进一步提升系统的适应性和灵活性,我们还引入了模型文件的选择功能,支持用户上传不同的训练好的模型文件(YOLOv8/v7/v6/v5)进行推理预测。这一功能使得用户能够根据自己的需求选择最适合的模型,以获得最佳的检测效果。
我们的系统还特别设计了多种画面显示模式,通过检测画面与原始画面的显示模式功能,用户可以选择同时显示检测画面和原始画面或者单独显示某一种,这增加了用户对检测过程和结果的掌控感。此外,特定目标的标记与结果显示功能通过下拉框让用户可以选择特定目标进行标记,并单独显示这些目标的检测结果,进一步提升了用户体验。为了方便用户对检测结果进行分析和记录,我们的系统提供了将检测结果整理显示在网页上的表格中的功能,并允许用户动态调整检测算法的置信度阈值和IOU阈值,以优化检测结果。用户还可以通过点击按钮将页面表格中的检测结果导出到CSV文件,或将标记后的图片、视频、摄像头画面结果导出为AVI图像文件,这些功能不仅提高了系统的实用性,也极大地方便了用户的后续使用和分析。
通过这些精心设计的功能和直观易用的系统界面,我们的系统不仅展现了其在钢材表面缺陷检测方面的强大能力,还提供了高效、灵活且用户友好的检测体验,满足了用户在不同场景下的多样化需求。
2. 绪论
2.1 研究背景及意义
在现代工业生产过程中,钢材作为基础建材,广泛应用于建筑、机械、汽车及船舶制造等领域。钢材的质量直接影响到成品的质量和安全性能,其中钢材表面缺陷是评估钢材质量的重要指标之一。钢材表面缺陷的类型多样,包括裂纹、划痕、凹陷、锈蚀等,这些缺陷可能源于生产过程中的各种因素,如原材料质量、加工工艺、储运环境等。因此,钢材表面缺陷检测对于保障产品质量、降低生产成本、提高生产效率具有至关重要的意义。
传统的钢材表面缺陷检测主要依赖于人工视觉检查,不仅效率低下,而且易受主观因素影响,检测结果缺乏稳定性和可靠性。随着计算机视觉和深度学习技术的快速发展,基于这些先进技术的自动化检测方法逐渐成为研究热点,其中YOLO(You Only Look Once)系列算法以其出色的实时检测性能和高准确率,在钢材表面缺陷检测领域得到了广泛应用。
YOLO算法自提出以来已经经历了多次迭代更新,从YOLOv1到最新的YOLOv8,每个版本都在性能、速度和准确性上有所改进。这些改进包括网络架构的优化、损失函数的调整、多尺度训练策略的应用等,使得YOLO系列算法能够更好地适应不同的检测任务,包括复杂多变的钢材表面缺陷检测。除了YOLO系列之外,还有其他基于深度学习的检测算法如SSD、Faster R-CNN等也被应用于此领域,但是由于YOLO算法在速度和效率上的显著优势,使其成为更适合实时检测应用的选择。
为了进一步提升钢材表面缺陷检测的准确性和效率,研究者们还致力于开发更高效的数据预处理方法、更精确的缺陷分类策略以及更强大的后处理技术。此外,随着数据集的不断更新和扩充,包含更多样化的缺陷类型和更复杂场景的数据集成为算法训练和测试的宝贵资源,有助于模型的优化和泛化能力的提升。
综上所述,钢材表面缺陷检测不仅在工业生产中具有重要的实际应用价值,同时也是计算机视觉和深度学习领域中的重要研究方向。通过持续的技术创新和方法改进,以及算法性能的不断优化,将大大推动钢材表面缺陷检测向着更高精度、更高效率的方向发展,为保障工业产品质量和生产安全提供有力支持。
2.2 国内外研究现状
在钢材表面缺陷检测领域,近年来基于深度学习的方法已经取得了显著的进展。特别是卷积神经网络(CNN)在图像识别和处理方面的强大能力,为提高缺陷检测的准确性和效率提供了新的技术手段。伴随着硬件计算能力的提升和算法的不断优化,一系列基于深度学习的新型算法被提出并应用于钢材表面缺陷检测。
YOLO系列作为典型的实时对象检测系统,以其快速高效的特点,在钢材表面缺陷检测中被广泛研究和应用。自从YOLOv11首次提出以来,其后续版本如YOLOv32、YOLOv43、YOLOv54以及最新的YOLOv85等,都在原有基础上进行了改进和优化。例如,YOLOv4通过引入CSPDarknet53作为骨干网络、使用路径聚合网络(PANet)和空间金字塔池化(SPP)等技术,大幅度提高了检测速度和准确率。YOLOv5则通过简化网络结构、优化训练策略等手段,在保持高效性能的同时进一步降低了模型的复杂度。最新的YOLOv8则在前几代的基础上,进一步优化了网络结构和训练机制,以适应更多样化的检测需求。
除了YOLO系列之外,其他基于深度学习的算法如Faster R-CNN、SSD等也被应用于钢材表面缺陷检测。Faster R-CNN通过引入区域建议网络(RPN),实现了对目标区域的高效预测,大幅提高了检测的准确性。而SSD算法则通过直接预测图像中的目标类别和位置信息,简化了检测流程,提高了处理速度。
此外,一些研究团队还在探索使用生成对抗网络(GAN)来提高钢材表面缺陷检测的性能。通过GAN生成的高质量合成图像,可以有效扩充训练数据集,提高模型对少见缺陷类型的检测能力。还有研究利用迁移学习和多任务学习等策略,将预训练模型应用于钢材表面缺陷检测,以减少对大量标注数据的依赖,同时提高模型的泛化能力和检测性能[^6]。
总的来说,随着深度学习技术的不断发展和完善,钢材表面缺陷检测的研究正朝着更高准确度、更快检测速度以及更好的泛化能力方向发展。未来,结合更先进的算法、更丰富的数据集以及更有效的训练策略,钢材表面缺陷检测的性能将会得到进一步的提升。

YOLO系列算法因其快速和准确的特性,在实时钢材表面缺陷检测中得到了广泛应用。自YOLO初版以来,该算法经历了多次迭代,YOLOv4和YOLOv55,通过引入更深的网络结构、改进的损失函数和更精细的特征提取机制,显著提高了检测的精度和速度。Bochkovskiy等人在YOLOv4中引入了Mish激活函数,提高了模型对小物体的识别能力,这对于检测大小不一的水果特别重要。而Redmon和Farhadi则通过在YOLOv3中引入多尺度预测,改进了模型对不同尺寸目标的检测性能。
总的来说,随着深度学习技术的不断发展和完善,钢材表面缺陷检测的研究正朝着更高准确度、更快检测速度以及更好的泛化能力方向发展。未来,结合更先进的算法、更丰富的数据集以及更有效的训练策略,钢材表面缺陷检测的性能将会得到进一步的提升。
2.3 要解决的问题及其方案
2.3.1 要解决的问题
在构建基于YOLOv8/v7/v6/v5的钢材表面缺陷检测系统中,我们面临多项挑战,这些挑战需要通过深度学习模型的精准训练和推理检测、算法性能的细致对比、以及用户友好的Web界面设计来克服。
-
缺陷检测的准确性和速度:钢材表面缺陷的类型多样且复杂,如裂纹、划痕、凹坑等,对检测算法的准确性和泛化能力提出了高要求。此外,考虑到实际生产线的需求,系统必须能够实时处理并检测出表面缺陷。为此,我们采用了基于YOLOv8/v7/v6/v5的深度学习模型,这些模型以其高效的检测速度和良好的准确率,在实时图像处理领域表现出色。通过在PyTorch框架下进行模型训练和优化,我们能够有效地提高缺陷检测的准确性和处理速度。
-
模型泛化能力和适应性:钢材生产环境的多变性(如光照变化、背景复杂度)要求检测模型具备出色的泛化能力和环境适应性。为解决这一问题,我们不仅使用了大量多样化的数据集进行模型训练,还利用了数据增强技术来模拟不同的环境条件,从而提高模型的鲁棒性。
-
用户交互界面的直观性和功能性:为了让用户能够便捷地使用系统进行钢材表面缺陷检测,我们基于streamlit开发了交互式的Web应用界面。该界面支持图片、视频以及实时摄像头数据的上传和检测,并允许用户轻松切换不同的模型文件进行推理预测。通过CSS美化界面设计,我们确保了界面的直观性和吸引力,同时,功能布局的合理性也使用户能够快速访问所需功能。
-
数据处理能力和系统性能:考虑到系统将处理大量的图像和视频数据,我们优化了数据处理流程和存储机制,确保了检测的实时性和数据的有效管理。利用PyTorch的高效计算能力和优化的数据加载器,大幅提升了系统的数据处理速度和性能。
-
系统的可扩展性和维护性:在系统设计时,我们充分考虑了未来可能的扩展需求和技术更新。通过模块化设计和良好的代码组织结构,我们的系统能够方便地集成新的算法模型或升级现有功能。使用PyCharm作为开发工具,进一步提高了代码的可维护性和开发效率。
通过上述解决方案的实施,我们的系统不仅能够高效准确地完成钢材表面缺陷的检测任务,还提供了良好的用户体验和强大的数据处理能力。这一系统的开发,对于推动钢材生产自动化和智能化水平的提升具有重要意义。
2.3.2 解决方案
为了有效应对钢材表面缺陷检测系统面临的挑战,我们将采用一系列精心设计的方法和技术策略。这些方法不仅聚焦于提升检测模型的准确性和速度,还涵盖了用户交互体验的优化和系统的可扩展性。
-
深度学习模型的选择和优化:
- 模型架构:选择基于YOLOv8/v7/v6/v5系列的深度学习模型作为核心检测算法。这些模型以其高效的检测速度和优异的准确性著称,非常适合于实时的钢材表面缺陷检测任务。通过比较这些版本在不同场景下的表现,我们可以选择最适合本系统需求的模型。
- 数据增强:使用多种数据增强技术,如随机裁剪、缩放、旋转、色彩调整等,以提高模型对不同环境条件(如光照变化、角度变化等)下缺陷的识别能力。
- 迁移学习:利用在大规模数据集上预训练的模型作为起点,通过迁移学习对特定的钢材表面缺陷数据集进行微调,从而加速训练过程并提升模型性能。
-
技术框架和开发工具:
- PyTorch框架:选用PyTorch作为主要的深度学习框架,其提供了灵活且强大的编程环境,支持快速的原型开发和深度学习模型的高效训练。
- Streamlit网页设计:基于Streamlit构建用户友好的Web应用界面,支持图像、视频及实时摄像头数据的上传和检测,同时提供模型文件切换等功能,增加系统的交互性和灵活性。
- CSS美化:利用CSS对Web应用界面进行美化和个性化设计,提高用户界面的美观度和用户体验。
- PyCharm IDE:使用PyCharm作为开发工具,其强大的代码编辑、调试和项目管理功能能够提高开发效率和代码质量。
-
功能实现和系统设计:
- 多输入源支持:设计系统以支持多种输入源,包括图像文件、视频流和实时摄像头捕获,以适应不同的检测需求和使用场景。
- 模型切换功能:实现模型动态切换功能,允许用户根据不同的检测需求选择适合的预训练模型,增强系统的适用性和灵活性。
-
数据处理和存储策略:
- 高效数据处理:通过优化PyTorch的数据预处理和加载机制,实现高效的数据处理流程,确保模型训练和检测的实时性。
- 智能数据存储:设计有效的数据存储方案,对检测结果和历史数据进行有效管理,支持快速查询和分析。
-
性能优化和系统测试:
- 性能调优:定期对模型和系统进行性能评估,通过模型压缩、精简网络结构、调整算法参数等方式进行针对性的优化,以提升检测速度和准确性。
- 全面测试:执行全面的系统测试,包括功能测试、性能测试和用户
2.4 博文贡献与组织结构
本文的主要贡献体现在以下几个方面:
-
文献综述:本文提供了关于钢材表面缺陷检测的深入文献综述,概述了当前领域内的研究进展、挑战以及各种解决方案,为读者建立了扎实的研究背景和理论基础。
-
数据集处理:详细介绍了钢材表面缺陷检测所使用的数据集的处理方法,包括数据的预处理、增强以及分割策略,确保了模型训练的高效性和准确性。
-
算法选择与优化:深入探讨了基于YOLOv8/v7/v6/v5的深度学习模型的选择和优化过程,强调了模型架构的重要性以及针对具体任务的定制化调整,提升了钢材表面缺陷检测的性能。
-
用户界面设计:采用Streamlit设计并实现了一个美观友好的网页用户界面,使得非技术用户也能轻松地使用本系统进行钢材表面缺陷检测,大大提高了系统的可用性。
-
算法效果对比:通过实验详细比较了YOLOv7/v6/v5等不同版本的性能表现,为读者提供了各算法在钢材表面缺陷检测任务上的直观对比,帮助用户选择最合适的模型。
-
资源分享:文章附带了完整的数据集和代码资源包的下载链接,使得读者能够轻松复现实验结果,甚至在此基础上进行进一步的研究和开发。
后续章节的组织结构如下:
- 绪论:介绍研究背景、意义以及主要挑战,为整个文献奠定基础。
- 算法原理:详细解析YOLOv8/v7/v6/v5等算法的工作原理和关键技术点,为后续的实验设计和结果分析提供理论支持。
- 数据集处理:描述数据集的来源、特点以及处理流程,包括数据清洗、增强和标注等步骤,确保了训练数据的质量和多样性。
- 代码介绍(模型预测与训练代码):提供模型训练和预测的详细代码说明,包括环境配置、参数设置和执行步骤等,使得读者能够快速理解和应用。
- 实验结果与分析:展示不同模型在钢材表面缺陷检测任务上的性能表现,包括准确率、检测速度等指标的对比分析,为模型选择提供依据。
- 系统设计与实现:介绍基于Streamlit的网页界面设计过程,包括界面布局、功能实现和用户交互设计等。
- 结论与未来工作:总结本文的主要贡献和成果,讨论存在的不足,并展望未来研究方向和改进空间。
通过这一系列的章节安排,本文旨在为钢材表面缺陷检测领域的研究者和开发者提供一个全面、深入且实用的参考资源。
3. 数据集处理
在本研究中,我们精心构建并使用了一个专门用于钢材表面缺陷检测的数据集,该数据集包含3037张图像,细分为1862张训练图像、592张测试图像以及583张验证图像。此数据集经过严格的筛选和预处理,以确保模型训练和验证的质量。为了适配深度学习模型的输入需求,我们对每张图像应用了一系列预处理步骤。首先,我们自动调整了每张图像的像素方向,并去除了EXIF方向信息,以统一图像的朝向。随后,所有图像被统一缩放至640x640像素的尺寸,采用拉伸的方式以保持统一输入规格,这对于保持算法处理速度至关重要。通过这三个数据子集,我们确保了模型训练的充分性,验证过程的准确性,以及测试结果的可信度。博主使用的类别如下:
Chinese_name = {'Cacat_Korosi': "腐蚀缺陷", 'Cacat_Las': "焊接缺陷", 'Cacat_Lubang': "孔洞缺陷", 'Cacat_Retak': "裂纹缺陷"}
针对数据集的缺陷标注,我们定义了四种类别的标签:腐蚀缺陷(Cacat_Korosi)、焊接缺陷(Cacat_Las)、孔洞缺陷(Cacat_Lubang)和裂纹缺陷(Cacat_Retak),并赋予它们中文名称以提高标签的可读性和理解性。这些类别不仅涵盖了钢材表面最常见的缺陷类型,也为算法提供了明确的分类任务。

分布分析图表揭示了数据集的具体情况。从数量分布的柱状图中可以看出,焊接缺陷类别(Cacat_Las)的样本数量最多,其次是腐蚀缺陷(Cacat_Korosi),而裂纹缺陷(Cacat_Retak)的样本数最少。这种不均衡分布可能会影响模型训练,因此我们可能需要考虑采用数据重采样或加权损失函数来缓解类别不平衡的问题。

通通过缺陷位置分布的热力图,我们发现大部分缺陷集中在图像的中央区域。这可能与钢材生产过程中缺陷出现的物理规律有关,也为我们在进行缺陷检测时提供了有价值的先验知识。此外,缺陷大小的分布图表显示,大多数缺陷在图像中占据的宽度和高度比例较小,这提示我们在设计检测算法时需要特别关注小目标的检测能力。
总体来说,我们的数据集经过了精心设计和预处理,旨在为钢材表面缺陷检测任务提供一个全面、平衡的数据基础。详细的类别标注和丰富的样本分布确保了算法训练的有效性,以及后续模型评估的广泛性和可靠性。通过这些准备工作,我们为开发出能够在各种工业环境中准确执行任务的高效算法打下了坚实的基础。
4. 原理与代码介绍
4.1 YOLOv8算法原理
YOLOv8 是最新的最先进的 YOLO 模型,它在以前成功的 YOLO版本基础上,引入了新的功能和改进,进一步提升了其性能和灵活性,能够更好得适应各种目标检测任务。
首先,YOLOv8在输入处理上采用了Mosaic数据增强方法,该方法通过将四张训练图像拼接成一张大图像,并在这个大图像上执行随机裁剪,有效地增加了模型训练时的背景复杂性和目标尺度变化。这种数据增强技术不仅提高了模型对不同尺寸目标的识别能力,而且增强了模型对多样化背景的适应性。此外,与YOLOv4时代相比,现在的YOLOv8能够处理更大的图像输入,这意味着更多的细节可以被捕捉,从而提高了模型在复杂场景下的精确度。
YOLOv8的网络结构是它的核心创新之一。它构建在YOLOv7的基础上,继承并改进了ELAN(Enhanced Layer Aggregation Network)的设计理念,同时引入了新的特征聚合机制来增强特征的表达能力。YOLOv8的网络结构优化了特征传递路径,减少了信息损失,并增强了不同尺度特征的融合能力,这对于提升模型对小目标的检测性能尤为重要。
在主干网络设计方面,YOLOv8采用了CBS(Cross-Stage-Partial connections)技术,这是一种改进的特征传递方式,通过跨阶段连接提高信息流的效率。此外,YOLOv8的C2F(Coarse-to-Fine)结构进一步优化了细粒度特征的利用。与YOLOv5的C3模块相比,YOLOv8的C2F模块通过精细化的特征处理策略,能够更有效地捕捉到细小目标的特征,这对于识别水果这类小型或远距离目标尤为重要。SPPF(Spatial Pyramid Pooling-Fast)模块是对YOLOv5中的SPP模块的改进,它能够通过池化操作快速提取不同尺度的上下文信息,而BottleneckCSP则是一种高效的特征聚合模块,用于增强网络的学习能力和特征表达。

在Neck部分,YOLOv8延续并优化了YOLOv5采用的特征金字塔网络(Feature Pyramid Network, FPN)和路径聚合网络(Path Aggregation Network, PAN)的设计。FPN和PAN的结合增强了模型在不同尺度上的特征提取能力,使得网络不仅能够检测大尺寸目标,还能敏锐捕捉到小尺寸目标。FPN通过从低到高的层级结构融合不同分辨率的特征信息,增强了模型在多尺度检测能力,而PAN则反向进行特征聚合,确保了从高分辨率层传递的细节信息不会丢失。这种结构设计充分利用了YOLOv8在深层网络和浅层网络中学到的信息,使得模型在处理复杂背景和不同大小目标时更为精确。
Head部分是YOLOv8进行目标分类和定位的核心,这一部分对检测的准确性起着决定性作用。YOLOv8采用了解耦头部(Decoupled Head)的设计,这意味着分类和定位任务被分开处理,以提高网络在处理这两个不同任务时的专注度和效率。在实际应用中,这种设计允许模型更灵活地调整分类和定位的特征提取策略,提高了检测的准确度。YOLOv8也继续使用Anchor-Based的方法,即预定义的锚点框帮助模型预测物体的位置,但是在YOLOv8中,这一机制被进一步优化,以适应更多样化的目标形状和尺寸。
总的来说,YOLOv8算法的Neck和Head部分的设计体现了在现有算法基础上的深度优化和创新。这些优化不仅增强了模型的特征提取能力,也提升了模型在不同任务中的专注度和精确度,从而确保了在各种复杂环境下对目标进行有效检测的能力。这样的技术进步为我们在钢材表面缺陷检测等具体应用中提供了强大的技术支持,使得YOLOv8能够在众多目标检测算法中脱颖而出。
4.2 模型构建
在本文的"代码介绍"部分,我们深入探讨了为钢材表面缺陷检测系统设计的关键代码组件。该系统采用了前沿的YOLOv8/v7/v6/v5算法,结合PyTorch框架和OpenCV库,构建了一个高效、可靠的检测模型。下面是构建该模型的核心代码段,我们将逐一分析它们的功能和作用。
# -*- coding: utf-8 -*-
import cv2 # 导入OpenCV库,用于处理图像和视频
import torch
from QtFusion.models import Detector, HeatmapGenerator # 从QtFusion库中导入Detector抽象基类
from datasets.label_name import Chinese_name # 从datasets库中导入Chinese_name字典,用于获取类别的中文名称
from ultralytics import YOLO # 从ultralytics库中导入YOLO类,用于加载YOLO模型
from ultralytics.utils.torch_utils import select_device # 从ultralytics库中导入select_device函数,用于选择设备
这段代码首先导入了处理图像所需的库cv2和torch。QtFusion.models包含了Detector类,为我们提供了一个模型检测器的抽象基础,而HeatmapGenerator用于生成热图,这对于可视化模型预测是非常有用的。Chinese_name字典提供了从类别ID到中文名称的映射,便于理解和展示结果。YOLO类是用于加载YOLO模型的关键组件,而select_device函数允许模型在CPU或GPU上运行。
device = "cuda:0" if torch.cuda.is_available() else "cpu"
上述代码行检查了系统是否支持CUDA,这对于加速模型训练和推理至关重要。如果CUDA可用,代码将使用GPU;否则,它将回退到CPU。
ini_params = {'device': device, # 设备类型'conf': 0.25, # 物体置信度阈值'iou': 0.5, # 非极大值抑制的IOU阈值'classes': None, # 类别过滤器'verbose': False
}
ini_params字典存储了模型推理的初始化参数。这里设置了设备类型、置信度阈值、IOU阈值等。这些参数在模型推理时使用,影响检测结果的质量和输出。接下来的函数count_classes是一个统计工具,它计算检测结果中每个类别的实例数量。这对于分析模型在不同类别上的表现和偏置是很有帮助的。
class YOLOv8v5Detector(Detector):
YOLOv8v5Detector类继承自Detector,专门为YOLOv8/v7/v6/v5模型的加载和运行提供支持。这个类是我们自定义检测器的核心,将前述导入的工具和模块整合到一起。
def load_model(self, model_path):
load_model方法负责加载预训练的YOLO模型。此方法将模型初始化为指定路径下的模型权重,并进行设备分配。加载模型后,我们通过self.model.names将类别名称从英文转换为中文。
def preprocess(self, img):
在preprocess方法中,我们可以实现多种图像处理技术,比如尺寸调整、归一化等,以符合模型的输入要求。当前,此方法只保存了原始图像。
def predict(self, img):
predict方法利用预处理后的图像进行推理。它使用初始化
4.3 训练代码
在深入探究构建深度学习模型的代码时,理解每一行代码的目的及其在整个训练流程中的作用至关重要。本博客将详细分析用于钢材表面缺陷检测的YOLO模型的训练过程。以下表格详细介绍了YOLOv8模型训练中使用的一些重要超参数及其设置:
| 超参数 | 设置 | 说明 |
|---|---|---|
学习率(lr0) | 0.01 | 决定了模型权重调整的步长大小,在训练初期有助于快速收敛。 |
学习率衰减(lrf) | 0.01 | 控制训练过程中学习率的降低速度,有助于模型在训练后期细致调整。 |
动量(momentum) | 0.937 | 加速模型在正确方向上的学习,并减少震荡,加快收敛速度。 |
权重衰减(weight_decay) | 0.0005 | 防止过拟合,通过在损失函数中添加正则项减少模型复杂度。 |
热身训练周期(warmup_epochs) | 3.0 | 初始几个周期内以较低的学习率开始训练,逐渐增加到预定学习率。 |
批量大小(batch) | 16 | 每次迭代训练中输入模型的样本数,影响GPU内存使用和模型性能。 |
输入图像大小(imgsz) | 640 | 模型接受的输入图像的尺寸,影响模型的识别能力和计算负担。 |
本博客章节旨在详细介绍如何利用YOLOv8模型进行钢材表面缺陷检测模型的训练过程。训练一个深度学习模型是一个多步骤的过程,涉及到设置环境、处理数据、配置模型参数、执行训练循环等多个环节。下面我们将一步步解析训练过程中的核心代码段,并说明其功能和作用。
首先,我们引入了进行深度学习所需的库和模块,包括os模块用于路径操作,torch用于构建和训练深度学习模型。ultralytics库提供了访问YOLO模型的接口,而QtFusion.path则用于生成数据集的路径。
import os
import torch
import yaml
from ultralytics import YOLO # 导入YOLO模型
from QtFusion.path import abs_path
device = "0" if torch.cuda.is_available() else "cpu"
首先,我们确定训练模型将使用的设备。如果GPU可用,我们将使用GPU来加速训练过程;否则,我们将使用CPU。使用GPU进行训练通常会大大减少所需时间。
workers = 1
batch = 8
这里,我们设置了用于数据加载的workers数量和训练过程中的batch大小。workers表示用于加载数据的子进程数,而batch大小决定了每次迭代中将处理多少图像数据。在拥有更强计算能力的机器上,你可以提高这两个参数以提升数据加载和处理速度。
data_name = "EmotionData"
data_path = abs_path(f'datasets/{data_name}/{data_name}.yaml', path_type='current')
unix_style_path = data_path.replace(os.sep, '/')
我们定义了数据集的名称,并构造了YAML配置文件的路径。这个YAML文件包含了训练所需的各种参数,包括类别、图像路径和验证集分割等。使用os.sep确保路径分隔符在不同操作系统中能够正确处理。
directory_path = os.path.dirname(unix_style_path)
with open(data_path, 'r') as file:data = yaml.load(file, Loader=yaml.FullLoader)
if 'path' in data:data['path'] = directory_path
with open(data_path, 'w') as file:yaml.safe_dump(data, file, sort_keys=False)
此处读取YAML文件内容,并在必要时更新path键值。这确保了无论数据集放置在何处,YOLO模型都可以正确地访问数据集的路径。
model = YOLO(abs_path('./weights/yolov8n.pt'), task='detect')
results2 = model.train(data=data_path,device=device,workers=workers,imgsz=640,epochs=120,batch=batch,name='train_v8_' + data_name
)
最后,我们加载YOLOv8预训练模型,并启动训练过程。YOLO类的train方法被用来执行实际的训练,其中指定了多个参数,如图像尺寸、训练周期数、批次大小和训练任务的名称。图像尺寸设置为640x640,这是YOLO模型常用的尺寸之一,它平衡了速度和准确性。我们计划训练模型120个周期(epochs),每个周期模型将遍历一次整个数据集。
通过以上步骤,我们成功地将YOLOv8模型应用于我们的数据集,并进行了训练。训练完成后,我们将获得一个能够识别钢材表面缺陷的模型,它将有助于在实际应用中提高检测速度和准确性。这个过程不仅体现了深度学习在工业视觉领域的应用,也展示了如何有效地利用现有的技术资源来解决实际问题。
5. 实验结果与分析
5.1 训练曲线
在深入分析YOLOv8在钢材表面缺陷检测任务上的训练过程时,我们主要关注损失函数的变化以及模型性能的评价指标。训练模型的目标是最小化损失函数,同时提高精度、召回率和平均精度(mAP)。损失函数和性能指标的图像提供了模型训练动态的丰富信息。

在深度学习模型的训练过程中,损失函数的变化和评估指标的表现是我们评价模型性能的关键。上图展示了一个基于YOLOv8算法的钢材表面缺陷检测模型在训练过程中的各项指标变化,包括损失函数和精度指标。
从损失函数的角度分析,模型有三种类型的损失:定位框损失(box_loss)、类别损失(cls_loss)和置信度损失(obj_loss)。在训练集和验证集上,这三种损失随着训练周期的增加而稳步下降,表明模型在逐步学习并改善其对钢材表面缺陷的检测能力。特别是定位框损失的下降,直接反映了模型在定位缺陷方面的性能提升。不过,值得注意的是,验证集上的损失下降速度略慢于训练集,这可能是由于模型对训练数据过拟合,或者验证集中存在更多复杂样本的结果。
在精度指标方面,我们可以看到Precision(精确率)、Recall(召回率)以及mAP(平均精度均值)指标。在训练过程中,这些指标存在波动,但总体趋势向好。精确率的波动表明模型对正样本的预测在稳定性上还有提升的空间,可能是因为正负样本比例不平衡或某些缺陷类别较难识别造成的。召回率相对平稳的上升表明模型对实际缺陷的识别能力在增强,这对于缺陷检测来说是至关重要的。
mAP是评估检测模型性能的重要指标之一,它考虑了各种阈值下的精确率和召回率。从图中我们可以看到,在不同的IoU阈值(如0.5和0.5-0.95范围)下,mAP指标随着训练的进行有所提高,说明模型对于不同大小和形状的缺陷都有了更好的检测能力。但mAP的波动也提示我们,模型可能在某些特定阶段对于特定类别的缺陷检测效果不稳定,需要进一步分析和调优。
综合以上分析,我们可以得出模型整体上是在有效学习的,损失函数的下降趋势和mAP的提高都证明了这点。然而,各项指标的波动也暗示我们可能需要对模型的训练过程做进一步的细化和优化,比如调整学习率策略、增加数据增强方法或采用更精细的类别平衡策略等,以提高模型在验证集上的泛化能力和稳定性。通过这样的分析,我们不仅能够评估模型当前的性能,还能够为模型的进一步开发提供有价值的指导。
5.2 PR曲线图
精确率-召回率(Precision-Recall, PR)曲线是机器学习中评价分类器性能的重要工具,尤其在数据集类别不平衡时比接收者操作特征曲线(Receiver Operating Characteristic, ROC)曲线更为有效。PR曲线描述了精确率(Precision)与召回率(Recall)之间的关系,理想状态下,这两者的值越接近1越好。

从提供的PR曲线图可以看出,我们的模型在不同类别上的表现存在显著差异。对于腐蚀缺陷(Cacat_Korosi)类别,模型的表现最好,其曲线下面积(Area Under Curve, AUC)达到了0.670,这表明在检测腐蚀缺陷方面,模型具有较高的精确率和召回率。对于焊接缺陷(Cacat_Las)类别,模型的AUC为0.554,表现次之,说明模型在检测此类缺陷时,识别的准确性和完整性略低。
另一方面,孔洞缺陷(Cacat_Lubang)的检测性能较差,AUC仅为0.030,这可能是由于数据集中此类样本数量较少,或者孔洞缺陷的特征在模型中没有被有效学习。裂纹缺陷(Cacat_Retak)的AUC为0.200,虽然优于孔洞缺陷,但仍然表明在检测此类缺陷时有很大的提升空间。整体来看,所有类别的平均精度均值(mean Average Precision, mAP)为0.364,表现出了模型在整体检测性能上还有较大的提升潜力。
这些数据指出,尽管模型在某些缺陷类型上表现不错,但在其他类型上还需进一步优化。对于孔洞缺陷的检测问题,我们可能需要收集更多的数据,或者探索更高级的特征提取技术,以提高模型的泛化能力。此外,针对模型整体性能的提升,我们可以考虑更复杂的模型架构,或者尝试不同的训练策略,如改变损失函数的权重,以增加对少数类别的关注。总之,通过PR曲线分析,我们不仅可以发现模型在不同类别上的性能差异,而且可以针对性地调整训练策略。
5.3 YOLOv8/v7/v6/v5对比实验
(1)实验设计:
本实验旨在评估和比较YOLOv5、YOLOv6、YOLOv7和YOLOv8几种模型在钢材表面缺陷目标检测任务上的性能。为了实现这一目标,博主分别使用使用相同的数据集训练和测试了这四个模型,从而可以进行直接的性能比较。该数据集包含钢材表面缺陷的图像。本文将比较分析四种模型,旨在揭示每种模型的优缺点,探讨它们在工业环境中实际应用的场景选择。
| 模型 | 图像大小 (像素) | mAPval 50-95 | CPU ONNX 速度 (毫秒) | A100 TensorRT 速度 (毫秒) | 参数数量 (百万) | FLOPs (十亿) |
|---|---|---|---|---|---|---|
| YOLOv5nu | 640 | 34.3 | 73.6 | 1.06 | 2.6 | 7.7 |
| YOLOv8n | 640 | 37.3 | 80.4 | 0.99 | 3.2 | 8.7 |
| YOLOv6N | 640 | 37.5 | - | - | 4.7 | 11.4 |
| YOLOv7-tiny | 640 | 37.4 | - | - | 6.01 | 13.1 |
(2)度量指标:
- F1-Score:F1-Score 作为衡量模型性能的重要指标,尤其在处理类别分布不均的数据集时显得尤为关键。它通过结合精确率与召回率,提供了一个单一的度量标准,能够全面评价模型的效能。精确率衡量的是模型在所有被标记为正例中真正属于正例的比例,而召回率则关注于模型能够识别出的真正正例占所有实际正例的比例。F1-Score通过两者的调和平均,确保了只有当精确率和召回率同时高时,模型的性能评估才会高,从而确保了模型对于正例的预测既准确又完整。
- mAP(Mean Average Precision):在目标检测任务中,Mean Average Precision(mAP)是评估模型性能的重要标准。它不仅反映了模型对单个类别的识别精度,而且还考虑了所有类别的平均表现,因此提供了一个全局的性能度量。在计算mAP时,模型对于每个类别的预测被单独考虑,然后计算每个类别的平均精度(AP),最后这些AP值的平均数形成了mAP。
| 名称 | YOLOv5nu | YOLOv6n | YOLOv7-tiny | YOLOv8n |
|---|---|---|---|---|
| mAP | 0.634 | 0.632 | 0.515 | 0.664 |
| F1-Score | 0.66 | 0.68 | 0.55 | 0.740 |
(3)实验结果分析:
本研究的目的是对YOLO系列中几种不同版本的性能进行对比分析,具体来说,是评估这些模型在布手势目标检测任务上的有效性。实验设计严谨,确保在相同条件下,对YOLOv5nu、YOLOv6n、YOLOv7-tiny和YOLOv8n四个模型进行评估,保证结果的可比性。我们选择了mAP和F1-Score作为度量指标,前者反映了模型在不同阈值下的平均精确度,后者则平衡考量了精确度和召回率。
通过实验得出的数据显示,YOLOv8n在mAP指标上取得了0.664的成绩,相比于其他三个版本,性能最佳。其次是YOLOv5nu和YOLOv6n,mAP分别为0.634和0.632,表现相当。而YOLOv7-tiny的表现则较为落后,mAP为0.515。在F1-Score指标上,YOLOv8n以0.740的结果遥遥领先,再次证明了其优越性。YOLOv6n以0.68的F1-Score紧随其后,YOLOv5nu的0.66也显示了良好的性能。同样地,YOLOv7-tiny的F1-Score为0.55,仍是四个模型中最低的。
YOLOv8n在这两个指标上表现最佳,可能是因为该版本在网络架构和优化算法上的进步,例如更高级的特征提取网络、更有效的损失函数和更精细的标签赋予策略。此外,YOLOv8n可能在处理数据集中布手势的特定特征上更为精准,如边缘、纹理和形状特征,这使得其在定位和识别手势时更加准确。

相对而言,YOLOv7-tiny在性能上落后于其他模型,这可能是由于其“tiny”版本的网络结构被设计为更小、更快,但以牺牲了一定的精度为代价。因此,在具有复杂背景和细微特征的数据集上,该模型可能难以捕捉到所有必要的信息,从而导致了较低的mAP和F1-Score。
这些发现对于未来在特定工业领域部署目标检测模型具有重要指导意义。它强调了在模型选择时需要综合考虑检测性能和计算资源。例如,对于需要高精度检测的应用场景,YOLOv8n可能是最佳选择;而在计算资源受限的情况下,YOLOv7-tiny尽管性能有所降低,但仍然是一个可行的轻量级方案。这也提示了未来的研究方向,即如何在保持高性能的同时减少模型的计算资源需求。
6. 系统设计与实现
6.1 系统架构概览
在设计基于YOLOv8/v7/v6/v5的钢材表面缺陷检测系统时,我们采用了一个模块化的系统架构设计,确保系统既高效又易于维护。以下是系统架构的关键组成部分:

1. 数据处理模块
这一模块负责处理输入数据,包括图像的加载、预处理、标准化等。在我们的代码中,这部分功能主要通过YOLOv8v5Detector类的preprocess方法实现。它确保输入图像被适当地转换和标准化,以满足模型的输入要求。
2. 模型加载与配置模块
模型加载与配置是系统的核心,决定了检测性能的上限。YOLOv8v5Detector类承担了这一角色,负责加载预训练的YOLO模型,并通过load_model方法加载指定路径下的模型权重。此外,我们还可以通过该类配置模型的关键参数,如置信度阈值(conf_threshold)和IOU阈值(iou_threshold),以适应不同的检测需求。
3. 检测执行模块
检测执行模块直接关联到实时检测功能的实现。在我们的系统中,Detection_UI类的process_camera_or_file方法充当这一模块的核心,它根据用户输入(摄像头实时流或上传的文件)执行检测任务。该方法内部调用frame_process进行单帧图像的检测,并集成了处理摄像头输入和文件输入的逻辑。
4. 检测结果处理模块
一旦检测完成,我们需要对结果进行处理和展示。Detection_UI类中的frame_process方法不仅执行检测,还处理检测结果,包括绘制检测框、标注类别和置信度。同时,该方法还负责生成选择信息列表(select_info),便于用户在界面上进行交互式的结果筛选。
5. 用户界面(UI)模块
为了让用户能够轻松地与系统交互,我们设计了一个直观的用户界面。Detection_UI类的setup_sidebar和setupMainWindow方法负责初始化和布局用户界面,包括侧边栏的配置选项和主窗口的显示模式。用户可以通过UI选择摄像头、上传文件、调整检测参数,并查看检测结果和日志信息。
6.2 系统流程
在基于YOLOv8/v7/v6/v5的钢材表面缺陷检测系统中,系统流程是实现高效、准确检测的关键。下面以程序流程图的形式,详细介绍系统的工作流程:

- 初始化系统
系统启动时,首先进行初始化操作,包括加载模型、配置参数和设置用户界面。具体步骤包括:
- 加载模型:
YOLOv8v5Detector类的实例化过程中调用load_model方法,加载指定的模型权重文件。 - 配置检测参数:在
Detection_UI类的构造函数中,根据用户的选择或默认设置,初始化检测参数,如置信度阈值(conf_threshold)、IOU阈值(iou_threshold)等。 - 设置用户界面:通过
Detection_UI类的setup_sidebar和setupMainWindow方法,初始化侧边栏和主窗口,提供用户配置和操作的界面。
-
用户配置
用户通过侧边栏进行配置,包括选择模型类型、调整检测参数、选择摄像头或上传文件。系统根据用户的配置更新相应的参数。 -
处理输入
根据用户的选择,系统处理摄像头输入或文件上传: 摄像头输入:如果用户选择了摄像头,系统将实时捕捉摄像头数据流进行检测。
文件上传:如果用户上传了图片或视频文件,系统将加载文件内容准备进行检测。 -
执行检测
对于捕捉到的每一帧图像,系统通过Detection_UI类中的frame_process方法进行处理:
- 调用
YOLOv8v5Detector类的preprocess方法对图像进行预处理。 - 使用
predict方法对预处理后的图像执行检测,获取检测结果。 - 根据检测结果,调用
postprocess方法进行结果的后处理,如绘制检测框、标注类别和置信度。
- 结果展示和日志记录
- 系统将检测结果实时展示在用户界面上,包括绘制的检测框和标注信息。
- 对于检测到的每个对象,系统通过
LogTable类记录详细的检测日志,并提供接口供用户导出日志信息。
- 用户交互
用户可以通过界面与系统交互,如重新配置检测参数、筛选特定检测结果等。系统将根据用户的操作实时更新界面和检测结果。
通过以上流程,我们的系统能够实现从输入处理到检测执行,再到结果展示和日志记录的完整工作流程,为用户提供一个高效且友好的钢材表面缺陷检测服务。
代码下载链接
如果您希望获取博客中提及的完整资源包,包含测试图片、视频、Python文件(*.py)、网页配置文件、训练数据集、代码及界面设计等,可访问博主在面包多平台的上传内容。相关的博客和视频资料提供了所有必要文件的下载链接,以便一键运行。完整资源的预览如下图所示:

资源包中涵盖了你需要的训练测试数据集、训练测试代码、UI界面代码等完整资源,完整项目文件的下载链接可在下面的视频简介中找到➷➷➷
演示及项目介绍视频:https://www.bilibili.com/video/BV1rx421D71g/

完整安装运行教程:
这个项目的运行需要用到Anaconda和Pycharm两个软件,下载到资源代码后,您可以按照以下链接提供的详细安装教程操作即可运行成功,如仍有运行问题可私信博主解决:
- Pycharm和Anaconda的安装教程:https://deepcode.blog.csdn.net/article/details/136639378;
软件安装好后需要为本项目新建Python环境、安装依赖库,并在Pycharm中设置环境,这几步采用下面的教程可选在线安装(pip install直接在线下载包)或离线依赖包(博主提供的离线包直接装)安装两种方式之一:
- Python环境配置教程:https://deepcode.blog.csdn.net/article/details/136639396(2,3方法可选一种);
- 离线依赖包的安装指南:https://deepcode.blog.csdn.net/article/details/136650641(2,3方法可选一种);
如使用离线包方式安装,请下载离线依赖库,下载地址:https://pan.baidu.com/s/1uHbU9YzSqN0YP_dTHBgpFw?pwd=mt8u (提取码:mt8u)。
7. 结论与未来工作
本研究针对工业领域中的钢材表面缺陷检测问题,开展了一系列基于YOLOv8/v7/v6/v5算法的深入研究与实践,最终构建了一个高效的缺陷检测系统。系统整合了多版本的YOLO算法,不仅在精确度和实时性方面得到了显著提升,还通过Streamlit实现了一个交互式的Web界面,显著降低了用户操作的复杂度,便于在工业生产中广泛应用。
通过实验结果证明,该系统在钢材表面缺陷识别的准确率和处理速度方面表现出色,为工业质量控制提供了有力的技术支持。同时,本文还详细展示了数据处理、模型训练和预测的完整过程,并且提供了一套完善的代码实现,便于其他研究者和工程师参考和进一步开发。
虽然当前的系统已经具备了实用价值,但钢材表面缺陷检测的任务仍然充满挑战。未来的研究和开发将围绕以下方向展开:
-
模型优化:我们计划通过实施更先进的网络结构优化,例如采用神经网络架构搜索(NAS)等技术,进一步提高模型的识别性能和计算效率。
-
算法创新:考虑到实际应用中钢材表面的多样性和复杂性,我们将探索更加创新的算法来处理钢材缺陷检测的特殊要求,以期在更复杂的场景下仍保持高准确率。
-
系统集成:未来工作还将包括将该检测系统与其他工业自动化组件相集成,以实现整个生产线的智能监控。
-
跨域适应性:将考虑如何提高模型在不同类型钢材、不同生产环境下的适用性和鲁棒性。
-
用户体验优化:进一步改善Web界面的用户体验,包括界面设计、交互逻辑等,使系统更易于使用,更符合工业现场操作人员的习惯。
-
应用拓展:探讨该检测系统在其他相关工业领域的应用,比如铝材、复合材料等其他金属材料的表面缺陷检测,充分挖掘该技术的潜力。
总结来说,本研究不仅提升了钢材表面缺陷检测技术的科研水平,也为工业生产提供了具有实际应用价值的解决方案。随着深度学习技术的不断进步和工业需求的不断提升,我们相信该技术在未来将在工业自动化和智能制造领域扮演更加关键的角色。
Han, Kai, et al. “Transformer in transformer.” Advances in neural information processing systems 34 (2021): 15908-15919. ↩︎
Tan, Mingxing, Ruoming Pang, and Quoc V. Le. “Efficientdet: Scalable and efficient object detection.” Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2020. ↩︎
Chadwick, Andrew J., et al. “Transferability of a Mask R–CNN model for the delineation and classification of two species of regenerating tree crowns to untrained sites.” Science of Remote Sensing 9 (2024): 100109. ↩︎
Liang, Weigang, et al. “Prediction of freshwater ecotoxicological hazardous concentrations of major surfactants using the QSAR–ICE–SSD method.” Environment International (2024): 108472. ↩︎
Zubkov, O. V., et al. “INVESTIGATION OF THE YOLOv5 ALGORITHM EFFICIENCY FOR DRONE RECOGNIZATION.” Telecommunications and Radio Engineering 83.1 (2024). ↩︎ ↩︎
相关文章:
基于深度学习的钢材表面缺陷检测系统(网页版+YOLOv8/v7/v6/v5代码+训练数据集)
摘要:本文深入研究了基于YOLOv8/v7/v6/v5的钢材表面缺陷检测系统,核心采用YOLOv8并整合了YOLOv7、YOLOv6、YOLOv5算法,进行性能指标对比;详述了国内外研究现状、数据集处理、算法原理、模型构建与训练代码,及基于Strea…...
计算机网络:数据链路层 - 点对点协议PPP
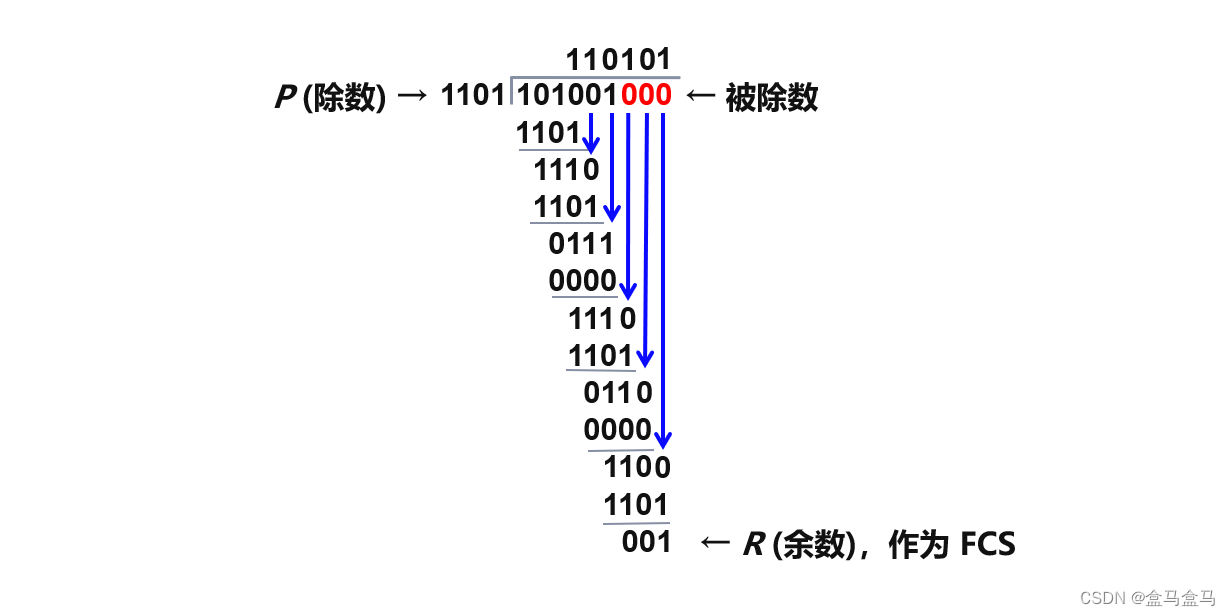
计算机网络:数据链路层 - 点对点协议PPP PPP协议的帧格式透明传输字节填充法零比特填充法 差错检测循环冗余校验 对于点对点链路,PPP协议是目前使用最广泛的数据链路层协议。比如说,当用户想要接入互联网,就需要通过因特网服务提供…...

Springboot集成token认证
一、引出session问题以及token、鉴权 session都是保存在内存中,认证用户增多,服务端开销明显增大。若是认证的记录保存在某台服务器内存中时,意味着用户的下次请求只能够在该服务器内存中进行认证。CSRF跨站攻击 token的鉴权机制࿱…...
计算机网络_工具
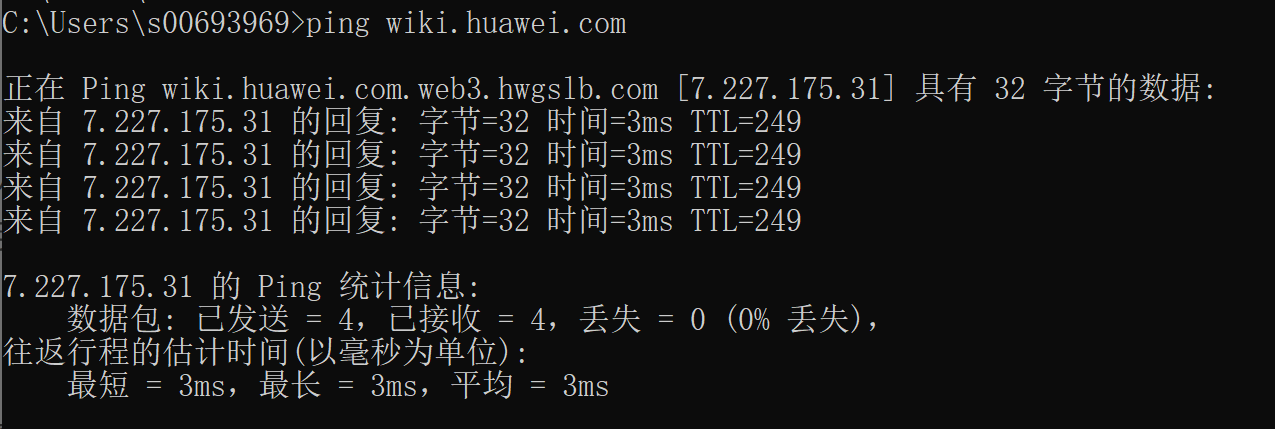
从你的电脑到指定ip网站,用时3ms ttl TTL Time To Live 数据包存活时间 指一个数据包在经过一个路由器时,可传递的最长距离(跃点数)。每当数据包经过一个路由器时,其存活次数就会被减一 256 - 249 7&…...

如何实现一个Java的@注解?
先看一段代码: ControllerAdvice public class GlobalExceptionHandler {ExceptionHandler(value Exception.class)public ResponseEntity defaultErrorHandler(Exception e) {// 将错误信息转成字符串String errorMessage ExceptionUtils.getStackTrace(e);// 创…...
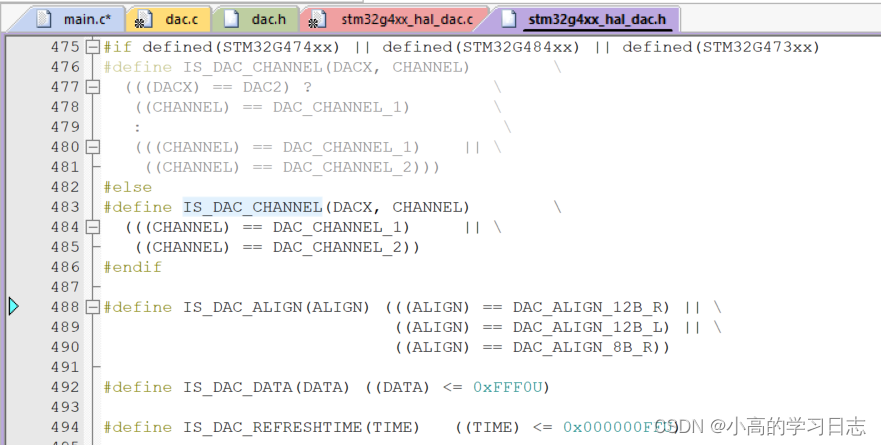
嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记12:DAC数模转换
系列文章目录 嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记01:赛事介绍与硬件平台 嵌入式|蓝桥杯STM32G431(HAL库开发)——CT117E学习笔记02:开发环境安装 嵌入式|蓝桥杯STM32G431(…...

迅饶科技 X2Modbus 网关 GetUser 信息泄露漏洞复现
0x01 产品简介 X2Modbus是上海迅饶自动化科技有限公司Q开发的一款功能很强大的协议转换网关, 这里的X代表各家不同的通信协议, 2是T0的谐音表示转换, Modbus就是最终支持的标准协议是Modbus协议。用户可以根据现场设备的通信协议进行配置,转成标准的Modbus协议。在PC端仿真…...

修改亚马逊云科技账户的密码和MFA
要使用AWS CLI删除当前账户的多因素认证(MFA)设备并修改密码,你需要先确保已安装并配置了AWS CLI,并且你的账户有足够的权限执行这些操作。下面是如何分步进行的指导: 1. 删除MFA设备 首先,你需要找出MFA设备的序列号或ARN。可以…...

提升性能与精准追踪:SkyWalking自定义跟踪忽略插件
前言 当使用分布式追踪系统时,有时需要排除某些端点或路径,以减轻追踪系统的负载或减少不必要的数据收集。为了满足这种需求,SkyWalking 提供了一个可选的插件,即 apm-trace-ignore-plugin,它允许自定义需要跳过的路径…...

第十三届蓝桥杯大赛软件赛省赛CC++大学B组
第十三届蓝桥杯大赛软件赛省赛CC 大学 B 组 文章目录 第十三届蓝桥杯大赛软件赛省赛CC 大学 B 组1、九进制转十进制2、顺子日期3、刷题统计4、修建灌木5、x进制减法6、统计子矩阵7、积木画8、扫雷9、李白打酒加强版10、砍竹子 1、九进制转十进制 计算器计算即可。2999292。 2、…...
zookeeper监听集群节点的实现zkclient组件实现方案(Java版)
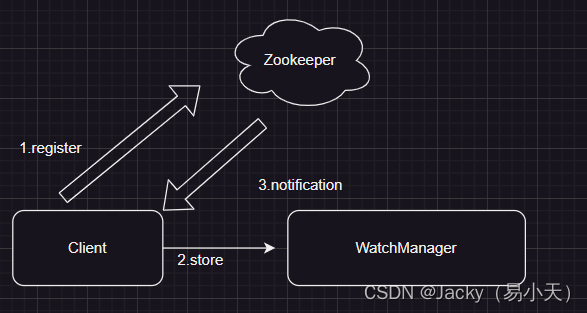
ZooKeeper Watcher 机制 client 向zookeeper 注册监听client注册的同时会存储一个WatchManager对象向zookeeper发生改变则notification client 并发送一个WatchManager对象,然后client再更新该对象 package com.jacky.zk.demo;import org.I0Itec.zkclient.IZkChildListener;…...
【ArduinoQuartus】在小脚丫STEP CYC10上安装PulseRain Reindeer并在软核上运行基础功能
【Arduino&Quartus】在小脚丫STEP CYC10上安装PulseRain Reindeer并在软核上运行基础功能 一、将Reindeer软核下载到STEP CYC10(一)下载PulseRain Reindeer软核(二)配置Reindeer软核到开发板1.将sof文件转换为jic文件2.将jic文…...

【电路笔记】-逻辑与门
逻辑与门 文章目录 逻辑与门1、概述2、2 输入晶体管与门3、数字与门类型4、7408 四路 2 输入与门逻辑与门是一种数字逻辑电路,仅当其所有输入均为高电平时,其输出才会变为高电平至逻辑电平 1。 1、概述 数字逻辑与门的输出状态仅在其任何输入处于逻辑电平“0”时再次返回“低…...
蓝桥杯练习——拼出一个未来
选中 index.html 右键启动 Web Server 服务(Open with Live Server),让项目运行起来。接着,打开环境右侧的【Web 服务】,就可以在浏览器中看到如下效果: 目标 完善 js/index.js 的 TODO 部分,实…...
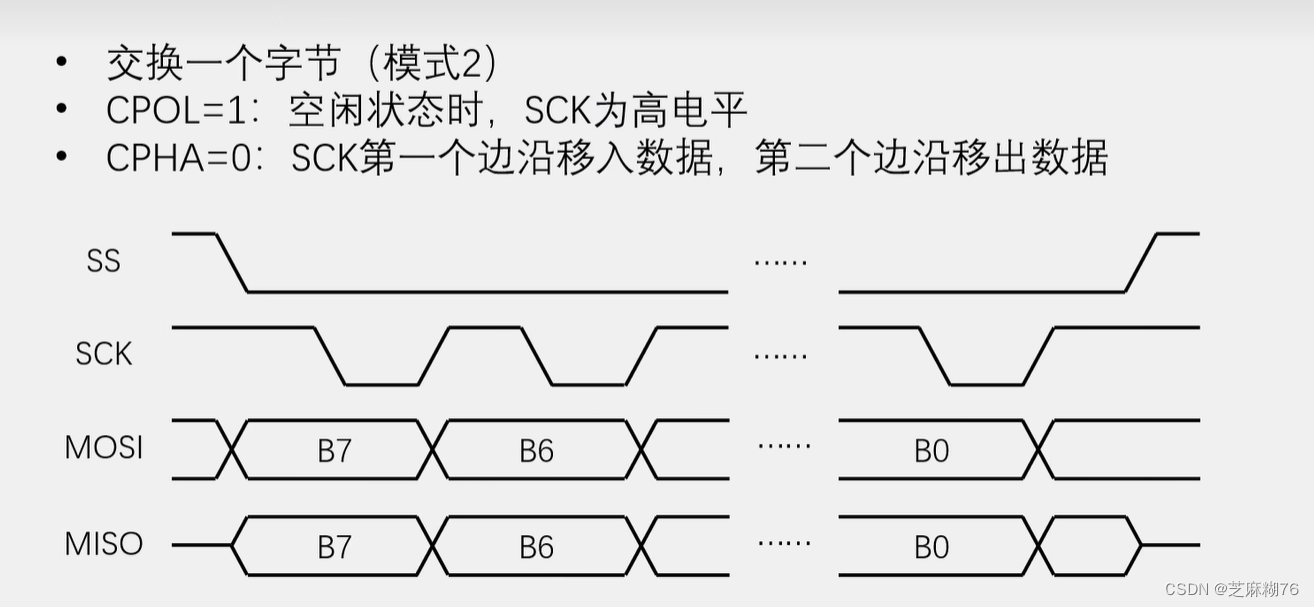
stm32f103c8t6学习笔记(学习B站up江科大自化协)-SPI
SPI通信 SPI,(serial peripheral interface),字面翻译是串行外设接口,是一种通用的数据总线,适用于主控和外挂芯片之间的通信,与IIC应用领域非常相似。 IIC无论是在硬件电路还是在软件时序设计…...

云计算的安全需求
目录 一、概述 二、云安全服务基本能力要求 三、信息安全服务(云计算安全类)资质要求 3.1 概述 3.2 资质要求内容 3.2.1 组织与管理要求 3.2.2 技术能力要求 四、云安全主要合规要求 4.1 安全管理机构部门的建立 4.2 安全管理规范计划的编制 4…...

【C++】编程规范之表达式原则
表达式中变量的位置 在编写表达式时,将变量放置在右边,可以提高代码的可读性和可理解性。这种做法符合自然语言的阅读习惯,使得代码更易于理解。 // Good if (5 x) {// do something }// Avoid if (x 5) {// do something }不变量和资源申…...

Python人工智能基础知识:理解神经网络与机器学习的基本概念
人工智能(Artificial Intelligence,AI)是当今科技领域的热门话题之一,而神经网络和机器学习作为AI的两个重要分支,在解决各种问题中发挥着重要作用。本文将详细介绍神经网络和机器学习的基本概念,帮助读者更…...
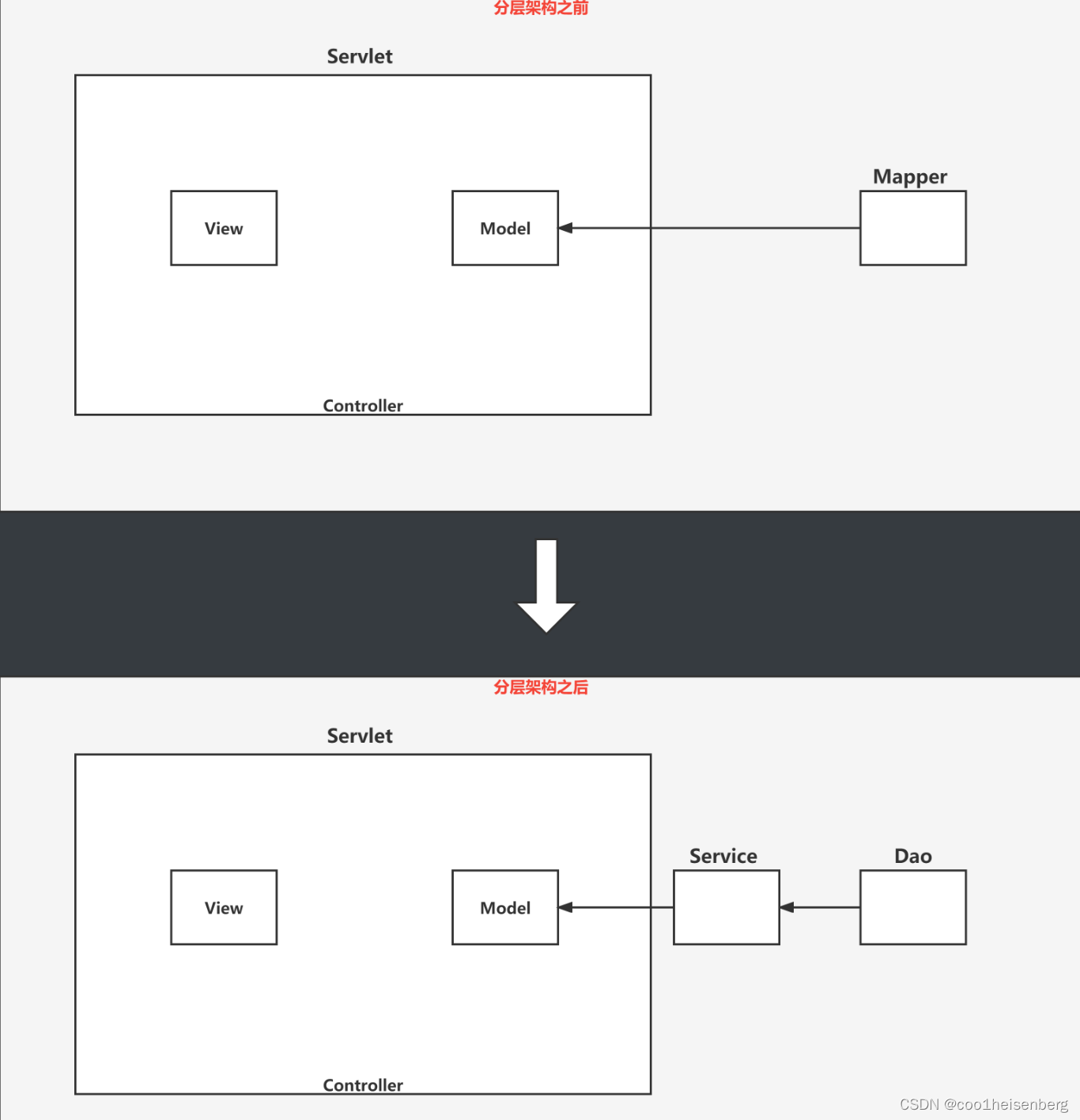
10_MVC
文章目录 JSON常用的JSON解析Jackson的常规使用指定日期格式 MVC设计模式MVC介绍前后端分离案例(开发与Json相关接口) 三层架构三层架构介绍 JSON JSON(JavaScript Object Notation) 是一种轻量级的数据交换格式,是存…...
【Java多线程(4)】案例:设计模式
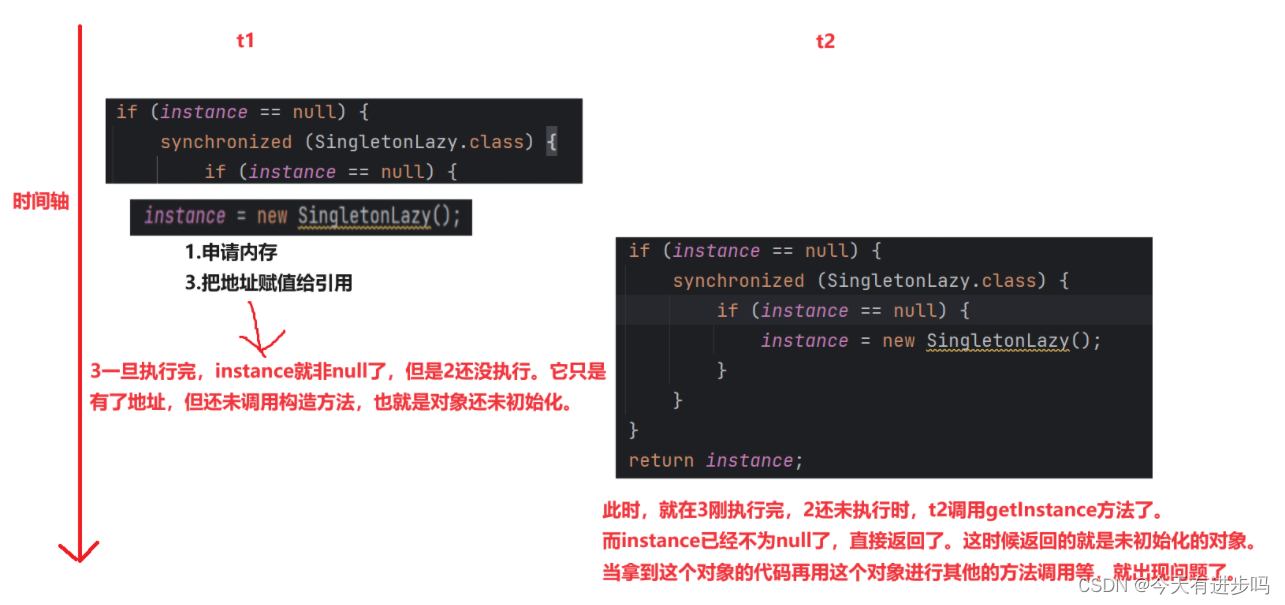
目录 一、什么是设计模式? 二、单例模式 1. 饿汉模式 2. 懒汉模式 懒汉模式-第一次改进 懒汉模式-第二次改进 懒汉模式-第三次改进 一、什么是设计模式? 设计模式是针对软件设计中常见问题的通用解决方案。它们提供了一种被广泛接受的方法来解决…...

【管理科学】【财务领域】第四十九篇 企业资本通过金融工具获取资本与通过制造舆论冲突吸引注意力01
企业资本运作与注意力经济融合模型分析 本模型旨在揭示企业如何将金融资本杠杆与注意力经济策略相结合,以实现资本扩张与用户习惯的深度绑定。 编号 类型 企业资本注意力经济和长期购买/消费习惯培养模型 逐步推理思考的方程式 时序数学方程式 交互周期和交互流程的数学…...

Android Studio中文界面完整指南:3分钟实现全中文开发环境
Android Studio中文界面完整指南:3分钟实现全中文开发环境 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack Android St…...

思源宋体7种字重免费商用字体:从零开始打造专业中文排版系统
思源宋体7种字重免费商用字体:从零开始打造专业中文排版系统 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 还在为中文排版设计而烦恼吗?想要一款既专业又完全…...

使用Python快速编写第一个调用Taotoken大模型的脚本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Python快速编写第一个调用Taotoken大模型的脚本 对于希望快速体验大模型能力的Python开发者而言,直接对接多个厂商…...

Java源码学习:深入剖析Java的concurrent包源码之`ReadWriteLock` 的并发哲学与云原生演进
引言:读写分离的并发智慧 在多线程编程的世界里,对共享数据的访问是永恒的主题。最朴素的解决方案是使用互斥锁(如 synchronized 或 ReentrantLock),它简单、安全,但代价高昂——任何时刻只允许一个线程访问…...

通过Taotoken管理API Key实现团队成员的访问控制与操作审计
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken管理API Key实现团队成员的访问控制与操作审计 在多人协作的开发场景中,如何安全、高效地管理大模型API的…...
)
用Python和STC单片机搞定AD7606八通道数据采集(附完整代码和避坑指南)
Python与STC单片机驱动AD7606八通道数据采集实战指南 AD7606作为一款16位精度的八通道模数转换器,在工业测量、医疗设备、科研实验等领域有着广泛应用。本文将带您从零开始,通过Python与STC8G系列单片机搭建完整的AD7606数据采集系统,涵盖硬件…...

全球仅200个开发者通行证配额,SITS 2026闭门实验舱议程首曝——你还在等什么?
更多请点击: https://intelliparadigm.com 第一章:2026奇点智能技术大会完整议程曝光:SITS 2026四大看点抢先看 全球瞩目的奇点智能技术大会(Singularity Intelligence Technology Summit, SITS)将于2026年5月12–15日…...

音频标注新革命:免费开源工具Audio Annotator完整使用指南
音频标注新革命:免费开源工具Audio Annotator完整使用指南 【免费下载链接】audio-annotator A JavaScript interface for annotating and labeling audio files. 项目地址: https://gitcode.com/gh_mirrors/au/audio-annotator 你是否曾为处理海量音频数据而…...

如何为你的Nextjs应用快速添加Taotoken大模型对话功能
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何为你的Nextjs应用快速添加Taotoken大模型对话功能 1. 项目准备与环境变量配置 在开始集成之前,你需要一个可运行的…...