wheeltec轮趣ROS教育机器人的网络连接
一、术语解析
宿主机:宿主机是指物理主机,比如用于开发测试的笔记本电脑和台式机电脑。
虚拟机:虚拟机是指安装在宿主机的VMware,推荐在宿主机上安装虚拟机,官方提供虚拟机的镜像以及配套的开发环境。
ROS主机:是指ROS小车上的主机;
二、相关介绍
0. ROS教育机器人-树莓派4B版(麦克纳姆轮)


1. 虚拟机信息
| 配置项 | 配置信息 |
|---|---|
| 主机名 | ubuntu |
| 账户名 | wheeltec_client |
| 登录密码 | dongguan |
| 静态IP | 192.168.0.136 |
| Ubuntu版本 | 18.04.6 LTS |

2. ROS主机信息
软件配置信息
| 配置项 | 配置信息 |
|---|---|
| 主机名 | wheeltec |
| 账户名 | wheeltec |
| 密码 | dongguan |
| 静态IP | 192.168.0.100 |
| WiFi名称 | WHEELTEC_RASPBERRY_NOETIC |
| WiFi密码 | dongguan |
| WIFI协议 | Wi-Fi 4 (802.11n) |
| 网络频带 | 2.4 GHz |
| OS版本 | Ubuntu 20.04.4 LTS |
| ROS版本 | Melodic |
硬件配置信息
| 配置项 | 配置信息 |
|---|---|
| 主控名称 | 树莓派 |
| CPU型号 | 四核Cortex-A72@1.8GHz |
| 系统架构 | aarch64 |
| 内存 | 4GB |
| 内存卡 | 32G(MicroSD卡) |
CPU信息
wheeltec@wheeltec:~$ lscpu
Architecture: aarch64
CPU op-mode(s): 32-bit, 64-bit
Byte Order: Little Endian
CPU(s): 4
On-line CPU(s) list: 0-3
Thread(s) per core: 1
Core(s) per socket: 4
Socket(s): 1
Vendor ID: ARM
Model: 3
Model name: Cortex-A72
Stepping: r0p3
CPU max MHz: 1800.0000
CPU min MHz: 600.0000
BogoMIPS: 108.00
Vulnerability Itlb multihit: Not affected
Vulnerability L1tf: Not affected
Vulnerability Mds: Not affected
Vulnerability Meltdown: Not affected
Vulnerability Mmio stale data: Not affected
Vulnerability Spec store bypass: Vulnerable
Vulnerability Spectre v1: Mitigation; __user pointer sanitization
Vulnerability Spectre v2: Vulnerable
Vulnerability Srbds: Not affected
Vulnerability Tsx async abort: Not affected
Flags: fp asimd evtstrm crc32 cpuid
内存信息
内存资源信息
wheeltec@wheeltec:~$ free -htotal used free shared buff/cache available
Mem: 3.7Gi 465Mi 550Mi 4.0Mi 2.7Gi 3.1Gi
Swap: 0B 0B 0B
内存卡读取速度
wheeltec@wheeltec:~$ sudo hdparm -t /dev/mmcblk0p2
[sudo] password for wheeltec:/dev/mmcblk0p2:HDIO_DRIVE_CMD(identify) failed: Invalid argumentTiming buffered disk reads: 144 MB in 3.03 seconds = 47.56 MB/sec
micro SD卡信息
wheeltec@wheeltec:~$ df -h
Filesystem Size Used Avail Use% Mounted on
udev 1.9G 0 1.9G 0% /dev
tmpfs 380M 4.4M 375M 2% /run
/dev/mmcblk0p2 29G 21G 7.6G 73% /
tmpfs 1.9G 0 1.9G 0% /dev/shm
tmpfs 5.0M 4.0K 5.0M 1% /run/lock
tmpfs 1.9G 0 1.9G 0% /sys/fs/cgroup
/dev/loop2 62M 62M 0 100% /snap/lxd/22761
/dev/loop0 60M 60M 0 100% /snap/core20/1627
/dev/loop1 60M 60M 0 100% /snap/core20/1977
/dev/loop4 47M 47M 0 100% /snap/snapd/19459
/dev/loop3 92M 92M 0 100% /snap/lxd/24065
/dev/mmcblk0p1 253M 129M 124M 52% /boot/firmware
tmpfs 380M 8.0K 380M 1% /run/user/1001
tmpfs 380M 32K 380M 1% /run/user/128
系统信息
wheeltec@wheeltec:~$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 20.04.4 LTS
Release: 20.04
Codename: focal
三、常用操作
1. 宿主机ssh连接ROS小车
1.1 连接WiFi
在宿主机上连接ROS小车自带的WiFi。

连接成功后,查看WiFi信息:

1.2 ping测试网络
ROS小车的静态IP是:192.168.0.100,在宿主机上ping ROS小车的iP是否连通。

能ping通,说明宿主机与ROS小车的网络连通。
1.3 ssh登录
| IP | 192.168.0.100 |
|---|---|
| 用户名 | wheeltec |
| 密码 | dongguan |
ssh wheeltec@192.168.0.100

2. 虚拟机与ROS小车通信
ROS小车发出WiFi,虚拟机连接该WiFi,即可实现虚拟机与ROS小车的通信。
默认情况下,ROS小车的静态IP为 192.168.0.100。只有当虚拟机与ROS小车在同一个网络才能进行通信,因此需要设置虚拟机为静态IP。关于设置虚拟机的静态IP的方法,请参见下文【 设置虚拟机的静态IP】。
| ip | |
|---|---|
| ROS小车 | 192.168.0.100 |
| 虚拟机 | 192.168.0.136 |
| 宿主机 | 192.168.0.190 |
3. 设置虚拟机的静态IP
默认情况下,虚拟机使用的是动态分配的IP地址,使用的过程中可能会出现IP地址不停变化的情况,因此设置静态IP地址可以为后续减少很多麻烦。
3.1 设置网络适配器
关闭虚拟机,设置网络适配器,将网络连接设置为“桥接模式”。

3.2 设置虚拟网络
设置虚拟网络,将网络连接模式为“桥接模式”。

特别注意,如果使用windows系统在连通网线的同时又使用无线网卡(WiFi),可能会出现网络配置修改之后虚拟机的网络无法使用的情况,因此官方建议只使用无线网卡。
3.3 设置静态IP
新配置一个“有线配置”。为了区分其他有线配置,需要自定义“新配置名称”
| 新配置名称 | Static IP |
|---|---|
| 地址 | 192.168.0.136 |
| 子网掩码 | 225.225.225.0 |
| 网关 | 192.168.0.1 |

配置完成后,查看配置信息。

3.4 ping ROS小车
在虚拟机上ping ROS小车的ip。

四、FAQ
1. ping ROS小车不通
wheeltec-client@ubuntu:~$ ping 192.168.0.100
PING 192.168.0.100 (192.168.0.100) 56(84) bytes of data.
From 192.168.0.136 icmp_seq=1 Destination Host Unreachable
From 192.168.0.136 icmp_seq=2 Destination Host Unreachable
From 192.168.0.136 icmp_seq=3 Destination Host Unreachable
From 192.168.0.136 icmp_seq=4 Destination Host Unreachable
From 192.168.0.136 icmp_seq=5 Destination Host Unreachable
# 错误原因
虚拟机与ROS小车不在同一个网段,导致无法通信# 解决办法
参考上文的【设置虚拟机的静态IP】
2. 虚拟机ssh连接ROS小车失败
wheeltec-client@ubuntu:~$ ssh wheeltec@192.168.0.100
@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@
@ WARNING: REMOTE HOST IDENTIFICATION HAS CHANGED! @
@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@
IT IS POSSIBLE THAT SOMEONE IS DOING SOMETHING NASTY!
Someone could be eavesdropping on you right now (man-in-the-middle attack)!
It is also possible that a host key has just been changed.
The fingerprint for the ECDSA key sent by the remote host is
SHA256:U0UQNK4E3/QW4/AT4Zt3SaBUqz1f/dkQA3edjdmg2x4.
Please contact your system administrator.
Add correct host key in /home/wheeltec-client/.ssh/known_hosts to get rid of this message.
Offending ECDSA key in /home/wheeltec-client/.ssh/known_hosts:1remove with:ssh-keygen -f "/home/wheeltec-client/.ssh/known_hosts" -R "192.168.0.100"
ECDSA host key for 192.168.0.100 has changed and you have requested strict checking.
Host key verification failed.
# 解决办法
ssh-keygen -f "/home/wheeltec-client/.ssh/known_hosts" -R "192.168.0.100"
输出结果
wheeltec-client@ubuntu:~$ ssh-keygen -f "/home/wheeltec-client/.ssh/known_hosts" -R "192.168.0.100"
# Host 192.168.0.100 found: line 1
/home/wheeltec-client/.ssh/known_hosts updated.
Original contents retained as /home/wheeltec-client/.ssh/known_hosts.old
wheeltec-client@ubuntu:~$ ssh wheeltec@192.168.0.100
The authenticity of host '192.168.0.100 (192.168.0.100)' can't be established.
ECDSA key fingerprint is SHA256:U0UQNK4E3/QW4/AT4Zt3SaBUqz1f/dkQA3edjdmg2x4.
Are you sure you want to continue connecting (yes/no)? yes
Warning: Permanently added '192.168.0.100' (ECDSA) to the list of known hosts.
wheeltec@192.168.0.100's password:
Welcome to Ubuntu 20.04.4 LTS (GNU/Linux 5.4.0-1069-raspi aarch64)* Documentation: https://help.ubuntu.com* Management: https://landscape.canonical.com* Support: https://ubuntu.com/advantageSystem information as of Sun Jul 16 09:37:46 UTC 2023System load: 2.85 Processes: 265Usage of /: 70.0% of 28.94GB Users logged in: 1Memory usage: 14% IPv4 address for docker0: 172.17.0.1Swap usage: 0% IPv4 address for wlan0: 192.168.0.100Temperature: 39.4 C673 updates can be applied immediately.
299 of these updates are standard security updates.
To see these additional updates run: apt list --upgradableNew release '22.04.2 LTS' available.
Run 'do-release-upgrade' to upgrade to it.Last login: Sun Jul 16 08:53:50 2023 from 192.168.0.190
相关文章:
wheeltec轮趣ROS教育机器人的网络连接
一、术语解析 宿主机:宿主机是指物理主机,比如用于开发测试的笔记本电脑和台式机电脑。 虚拟机:虚拟机是指安装在宿主机的VMware,推荐在宿主机上安装虚拟机,官方提供虚拟机的镜像以及配套的开发环境。 ROS主机&…...
【Linux ARM 裸机】开发环境搭建
1、Ubuntu 和 Windows 文件互传 使用过程中,要频繁进行 Ubuntu 和 Windows 的文件互传,需要使用 FTP 服务; 1.1、开启 Ubuntu 下的 FTP 服务 //安装 FTP 服务 sudo apt-get install vsftpd //修改配置文件 sudo vi /etc/vsftpd.conf//重启…...

怎么保证缓存与数据库的最终一致性?
目录 零.读数据的标准操作 一.Cache aside Patten--旁路模式 二.Read/Write Through Pattern--读写穿透 三.Write Back Pattern--写回 四.运用canal监听mysql的binlog实现缓存同步 零.读数据的标准操作 这里想说的是不管哪种模式读操作都是一样的,这是一种统一…...
免费SSL通配符证书/SSL泛域名证书获取教程
我们先基本了解什么是SSL证书以及其作用。SSL证书是一种数字证书,它通过为网站提供身份验证和数据加密服务,从而保护网站的用户信息安全。当我们在浏览器的地址栏看到“https”和绿色锁标志时,就表示该网站使用了SSL证书。 那么什么又是通配…...
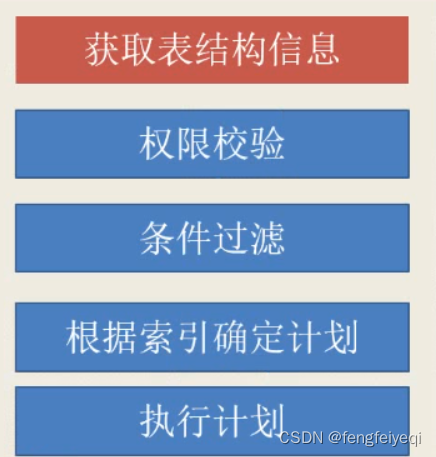
mysql结构与sql执行流程
Mysql的大体结构 客户端:用于链接mysql的软件 连接池: sql接口: 查询解析器: MySQL连接层 连接层: 应用程序通过接口(如odbc,jdbc)来连接mysql,最先连接处理的是连接层。 连接层…...

vue快速入门(十二)v-key索引标志
注释很详细,直接上代码 新增内容 v-key的使用场景数组筛选器的使用 源码 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-…...

智能网联汽车自动驾驶数据记录系统DSSAD数据配置
目录 第一章 数据配置一般要求 第二章 数据配置文件中的文件描述 第三章 数据配置文件中的数据描述 第四章 数据配置文件中的数据字典 表A.1 数据字典格式定义 第一章 数据配置一般要求 数据配置文件数据内容应为可读的十进制数据。 数据配置文件应以文件的形式存储在自动驾驶…...

linux知识点
绝对路径用什么符号表示?当前目录、上层目录用什么表示?主目录用什么表示? 切换目录用什么命令 绝对路径: 如/etc/init.d当前目录和上层目录: ./ …/主目录: ~/切换目录: cd 怎么查看当前进程?…...

微信小程序实现滚动标签
使用scroll-view标签可实现组件滚动标签 1、list中 list.wxml代码如下: <!--pages/list/list.wxml--> <navigation-bartitle"小程序" back"{{false}}"color"black" background"#FFF"></navigation-bar><scroll-…...

大语言模型上下文窗口初探(下)
由于篇幅原因,本文分为上下两篇,上篇主要讲解上下文窗口的概念、在LLM中的重要性,下篇主要讲解长文本能否成为LLM的护城河、国外大厂对长文本的态度。 3、长文本是护城河吗? 毫无疑问,Kimi从一开始就用“长文本”占领…...

Java整合ElasticSearch8.13
1、引入Jar包 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-data-elasticsearch</artifactId> </dependency> 2、配置ES连接信息 spring:elasticsearch:# 地址uris: http://xxx:9200# 用户…...
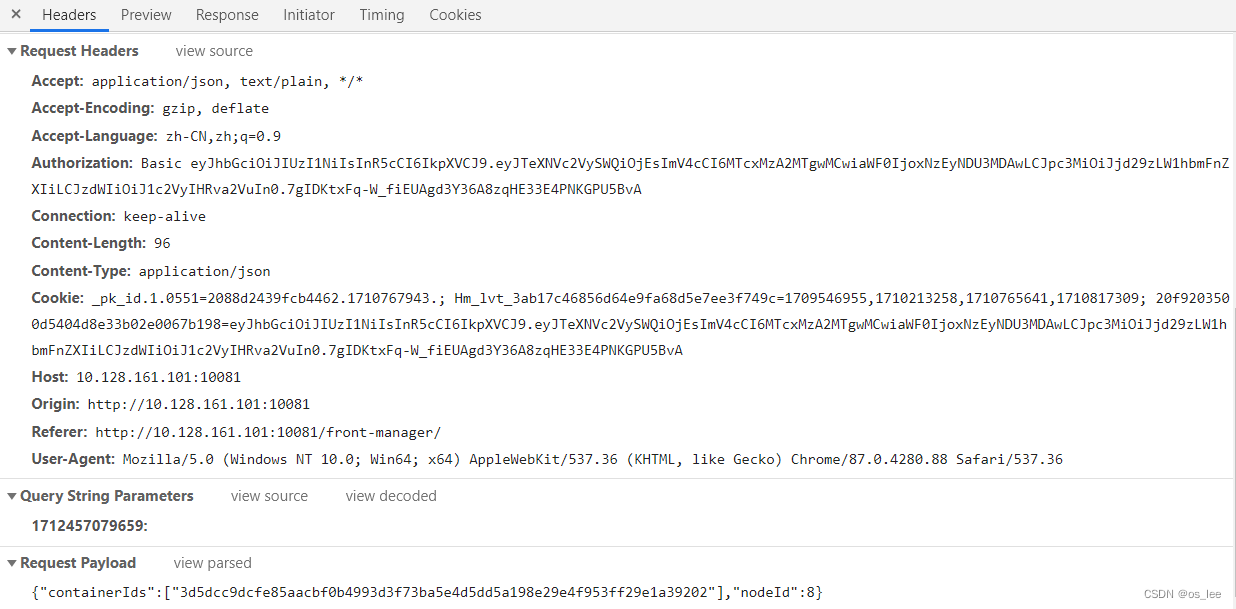
2.网络编程-HTTP和HTTPS
目录 HTTP介绍 HTTP协议主要组成部分 GET 和 POST有什么区别 常见的 HTTP 状态码有哪些 http状态码100 HTTP1.1 和 HTTP1.0 的区别有哪些 HTTPS 和 HTTP 的区别是什么 HTTP2 和 HTTP1.1 的区别是什么 HTTP3 和 HTTP2 的区别是什么 HTTPS的请求过程 对称加密和非对称…...
MTK i500p AIoT解决方案
一、方案概述 i500p是一款强大而高效的AIoT平台,专为便携式、家用或商用物联网应用而设计,这些应用通常需要大量的边缘计算,需要强大的多媒体功能和多任务操作系统。该平台集成了Arm Cortex-A73 和 Cortex-A53 的四核集群,工作频…...
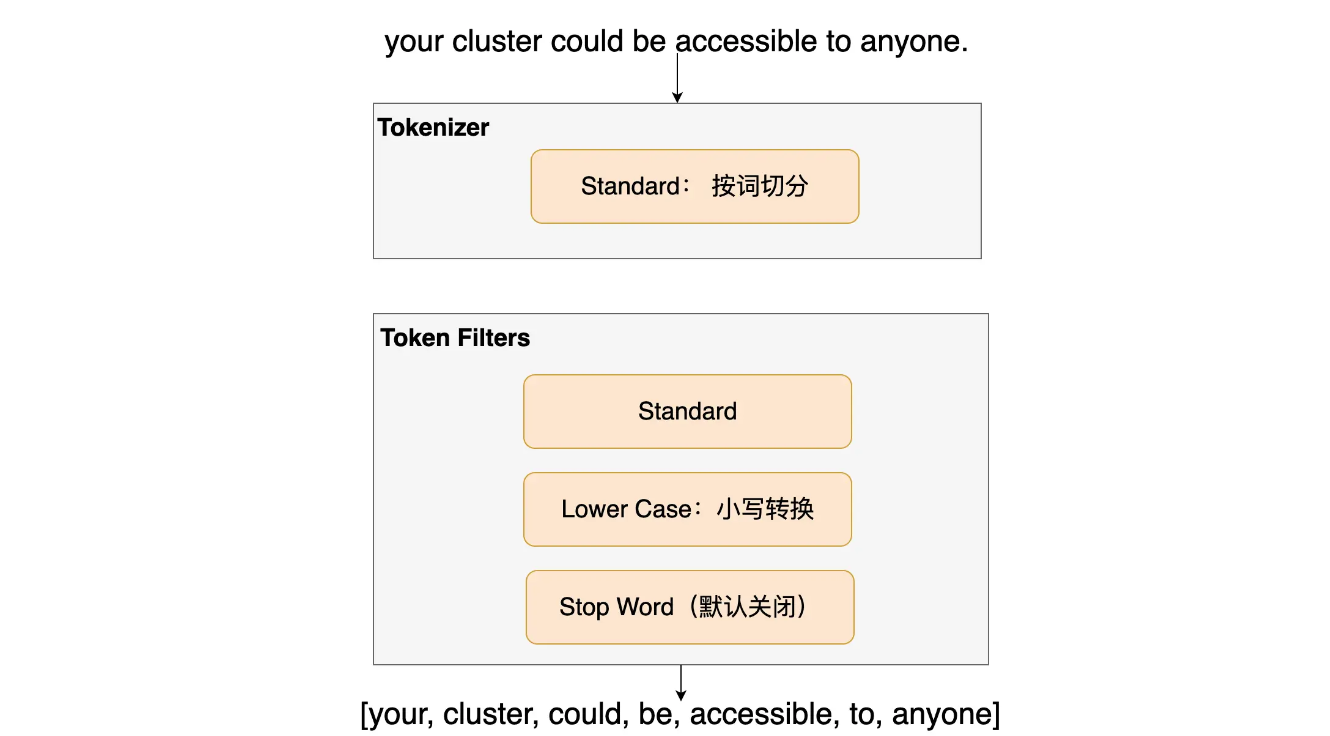
ES入门十四:分词器
我们存储到ES中数据大致分为以下两种: 全文本,例如文章内容、通知内容精确值,如实体Id 在对这两类值进行查询的时候,精确值类型会比较它们的二进制,其结果只有相等或者不想等。而对全文本类型进行等值比较是不太实现…...

汇编——SSE打包整数
SSE也可以进行整数向量的加法,示例如下: ;sse_integer.asm extern printfsection .datadummy db 13 align 16pdivector1 dd 1dd 2dd 3dd 4pdivector2 dd 5dd 6dd 7dd 8fmt1 db "Packed Integer Vector 1: %d, %d, %d, %d",…...
)
动态规划(2)
动态规划(2) 文章目录 动态规划(2)1、聪明的寻宝人2、基因检测3、药剂稀释4、找相似串 1、聪明的寻宝人 #include <iostream> using namespace std; void MaxValue(int values[], int weights[], int n, int m) {int dp[21…...

JetBrains IDE 2024.1 发布 - 开发者工具
JetBrains IDE 2024.1 (macOS, Linux, Windows) - 开发者工具 CLion, DataGrip, DataSpell, Fleet, GoLand, IntelliJ IDEA, PhpStorm, PyCharm, Rider, RubyMine, WebStorm 请访问原文链接:JetBrains IDE 2024.1 (macOS, Linux, Windows) - 开发者工具࿰…...

C++ 构造函数中的参数顺序
描述: 未初始化的参数必须在初始化参数之前 正确 ✓ 写法: mother(const char* food, const char* lastName"无姓", const char* firstName "无名" ); 错误❌写法: mother(const char* lastName"无姓", …...

Git Flow困境逃脱指南
本来来自极狐GitLab 资源中心,原文链接:https://resources.gitlab.cn/articles/020183ba-cfc0-4917-b901-248acdcfc92f。 GitLab 是一个全球知名的一体化 DevOps 平台,很多人都通过私有化部署 GitLab 来进行源代码托管。极狐GitLab ÿ…...

MySQL的sql_mode模式简介
前言 今天同事使用数据库时报错,排查问题时发现配置文件里的sql_mode配置被人注释了,所以通过查询资料对这个配置进行了下了解。 介绍 mysql为了支持在不同的环境下运行,允许我们给它设置不同的运行模式(sql_mode)。 不同的运行模式&#…...

微软:小模型替代大模型执行终端任务
📖标题:Terminus-4B: Can a Smaller Model Replace Frontier LLMs at Agentic Execution Tasks? 🌐来源:arXiv, 2605.03195v1 🛎️文章简介 🔸研究问题:在代码智能体的终端执行子任务中&#x…...

从逻辑实体到系统工程:深度解析软件危机的起源与软件工程的三大支柱
从逻辑实体到系统工程:深度解析软件危机的起源与软件工程的三大支柱 摘要:在计算机科学的浩瀚星图中,“软件”无疑是那颗最耀眼却也最神秘的恒星。它无形无质,却驱动着现代文明的运转。然而,正是这种“无形”ÿ…...

【USB3.0协议探秘】实战篇·三种复位事件的触发机制与链路状态变迁
1. 认识USB3.0的三种复位机制 刚接触USB3.0协议时,很多人会被各种复位类型绕晕。在实际开发中,我就遇到过因为混淆PowerOn Reset和Warm Reset导致设备无法正常初始化的情况。今天我们就来彻底搞懂这三种复位机制的区别和应用场景。 USB3.0协议定义了三种…...

别再手动导数据了!用PostgreSQL FDW把ClickHouse和MongoDB变成你的“超级外挂”数据仓库
异构数据联邦实战:用PostgreSQL FDW构建零延迟数据枢纽 当业务数据散落在多个异构数据库中时,传统ETL方案就像用卡车在不同仓库之间搬运货物——不仅耗时耗力,数据新鲜度也难以保证。想象一下:用户画像在PostgreSQL,行…...

植物树枝叶片果实检测数据集7220张VOC+YOLO格式
植物树枝叶片果实检测数据集7220张VOCYOLO格式数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):7220 标注数量(xml文件个数):7220…...

4 款主流论文降 AI 软件实测对比!谁能 5 分钟把 AI 率降到 10% 以下
4 款主流论文降 AI 软件实测对比!谁能 5 分钟把 AI 率降到 10% 以下 毕业季最焦虑的事——答辩前剩 3 天、AI 率还有 70%、想找一款 5 分钟就能搞定的工具。 市面上很多工具宣称"几分钟出结果"——但实测下来快的快、慢的慢、效果差距更大。这篇文章实测对…...

共享内存概述
共享内存,就是在内存里开辟一块公共空间,多个进程可以同时映射到自己的虚拟地址空间,大家直接读写同一块物理内存。是 Linux 进程间通信 IPC 最快 的一种方式。1️⃣创建共享内存空间2️⃣映射到自己的进程3️⃣strcpy写数据4️⃣断开与共享内…...

gptree:为AI生成项目结构报告,提升代码分析与协作效率
1. 项目概述与核心价值最近在整理个人项目和代码库时,我遇到了一个几乎所有开发者都会头疼的问题:项目越做越多,文件夹嵌套越来越深,README写得再好,时间一久也记不清某个具体功能的实现细节藏在哪个文件的哪个角落里。…...

你的Type-C设备为什么容易坏?可能是静电防护没做对!从手机到笔记本的防护方案拆解
Type-C设备静电防护全指南:从原理到实战的完整解决方案 每次插拔Type-C数据线时,那个微小的火花可能正在悄悄摧毁你的设备。我拆解过上百台因静电损坏的电子产品,发现90%的Type-C接口故障都始于那个看似无害的瞬间放电现象。这种现象在干燥季…...

开源轻量CRM系统skill-twenty-crm技术解析与全栈部署指南
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫devchaudhary24k/skill-twenty-crm。光看这个名字,你可能会有点懵,这“Skill Twenty CRM”到底是个啥?作为一个在软件开发和团队协作领域摸爬滚打多年的老手&#x…...