【Python】FANUC机器人OPC UA通信并记录数据
目录
- 引言
- 机器人仿真
- 环境准备
- 代码实现
- 1. 导入库
- 2. 设置参数
- 3. 日志配置
- 4. OPC UA通信
- 5. 备份旧CSV文件
- 6. 主函数
- 总结
引言
OPC UA(Open Platform Communications Unified Architecture)是一种跨平台的、开放的数据交换标准,常用于工业自动化领域。Python因其易用性和丰富的库支持,成为实现OPC UA通信的不错选择。本文将介绍如何使用Python进行OPC UA通信,并实时记录从FANUC机器人获取的数据。
机器人仿真
FANUC机器人可以使用官方软件RoboGuide进行机器人仿真,启动后默认OPC UA地址为127.0.0.1:4880/FANUC/NanoUaServer。

环境准备
- Python 3.5+
- opcua库:用于实现OPC UA通信
- logging库:用于记录日志
安装opcua库:
pip install opcua
代码实现
1. 导入库
import csv
from datetime import datetime
import logging
import os
import shutil
import time
from typing import List
from opcua.common.node import Node
from opcua import Client, ua
2. 设置参数
SERVER_URL = "opc.tcp://127.0.0.1:4880/FANUC/NanoUaServer"
CSV_FILENAME = 'fanuc_opcua_data.csv'
FAUNC_LOG = 'fanuc.log'
LOG_DIR = 'log'
BACKUP_DIR = 'backup'
3. 日志配置
def getLogger(filename: str):if not os.path.exists(LOG_DIR):os.makedirs(LOG_DIR)logger = logging.Logger(filename[:-4].upper(), logging.INFO)formatter = logging.Formatter("%(asctime)s - %(name)s - %(levelname)s %(message)s")fh = logging.FileHandler(LOG_DIR + "/" + filename, encoding="utf-8", mode="a")fh.setFormatter(formatter)ch = logging.StreamHandler()ch.setFormatter(formatter)logger.addHandler(fh)logger.addHandler(ch)return loggerLOGGER = getLogger(FAUNC_LOG)
4. OPC UA通信
- 连接到服务器
def connect_to_server(url):client = Client(url)client.connect()return client
- 获取根节点和对象节点
def get_root_node(client: Client):return client.get_root_node()
def get_objects_node(client: Client):return client.get_objects_node()
- 遍历所有子节点并返回变量节点的路径和数值
def get_variables(node: Node, path=""):variables = {}children: List[Node] = node.get_children()for child in children:try:name: ua.QualifiedName = child.get_browse_name()new_path = f"{path}/{name.Name}"if child.get_node_class() == ua.NodeClass.Variable:value = child.get_value()if isinstance(value, list):value = ','.join(str(x) for x in value)if isinstance(value, str):value = value.replace('\n', '\\n').replace(',', ' ')variables[new_path] = valueelse:variables.update(get_variables(child, new_path))except Exception as e:LOGGER.error(f"Error fetching variable: {new_path}, Error: {e}")return variables
5. 备份旧CSV文件
def backup_csv_file(filename):if not os.path.exists(BACKUP_DIR):os.makedirs(BACKUP_DIR)if os.path.exists(filename):modification_time = os.path.getmtime(filename)modification_time_str = datetime.fromtimestamp(modification_time).strftime('%Y%m%d%H%M%S')new_filename = f"{BACKUP_DIR}/{filename}_{modification_time_str}"try:shutil.move(filename, new_filename)LOGGER.info(f"文件已移动到 {new_filename}")except Exception as e:LOGGER.error(f"移动文件出错: {new_filename}, Error: {e})
6. 主函数
if __name__ == "__main__":try:client = connect_to_server(SERVER_URL)root_node = get_root_node(client)objects_node = get_objects_node(client)backup_csv_file(CSV_FILENAME)with open(CSV_FILENAME, mode='w', newline='') as csvfile:num = 0while True:variables = get_variables(objects_node)if num == 1:writer = csv.DictWriter(csvfile, fieldnames=variables.keys())writer.writeheader()writer.writerow(variables)csvfile.flush()num += 1LOGGER.info("数据记录:" + str(num))time.sleep(1)except KeyboardInterrupt:print("程序被用户中断")finally:client.disconnect()
记录数据预览:

总结
本文介绍了如何使用Python进行OPC UA通信,并实时记录从FANUC机器人获取的数据。通过使用opcua库,我们可以轻松地连接到OPC UA
完整代码:
import csv
from datetime import datetime
import logging
import os
import shutil
import time
from typing import List
from opcua.common.node import Node
from opcua import Client, ua# OPC UA服务器的URL
SERVER_URL = "opc.tcp://127.0.0.1:4880/FANUC/NanoUaServer"
# CSV文件名
CSV_FILENAME = 'fanuc_opcua_data.csv'
# 日志文件
FAUNC_LOG = 'fanuc.log'
# 文件夹
LOG_DIR = 'log'
BACKUP_DIR = 'backup'def getLogger(filename: str):if not os.path.exists(LOG_DIR):os.makedirs(LOG_DIR)logger = logging.Logger(filename[:-4].upper(), logging.INFO)formatter = logging.Formatter("%(asctime)s - %(name)s - %(levelname)s %(message)s")fh = logging.FileHandler(LOG_DIR + "/" + filename, encoding="utf-8", mode="a")fh.setFormatter(formatter)ch = logging.StreamHandler()ch.setFormatter(formatter)logger.addHandler(fh)logger.addHandler(ch)return loggerLOGGER = getLogger(FAUNC_LOG)
def connect_to_server(url):"""创建客户端实例并连接到服务端"""client = Client(url)client.connect()return clientdef get_root_node(client: Client):"""获取服务器命名空间中的根节点"""return client.get_root_node()def get_objects_node(client: Client):"""获取服务器的对象节点"""return client.get_objects_node()def get_variables(node: Node, path=""):"""遍历所有子节点并返回变量节点的路径和数值"""variables = {}children: List[Node] = node.get_children()for child in children:try:name: ua.QualifiedName = child.get_browse_name()new_path = f"{path}/{name.Name}"if child.get_node_class() == ua.NodeClass.Variable:value = child.get_value()if isinstance(value, list):value = ','.join(str(x) for x in value)if isinstance(value, str):value = value.replace('\n', '\\n').replace(',', ' ')variables[new_path] = valueelse:variables.update(get_variables(child, new_path))except Exception as e:LOGGER.error(f"Error fetching variable: {new_path}, Error: {e}")return variablesdef backup_csv_file(filename):"""如果CSV文件已存在则备份"""if not os.path.exists(BACKUP_DIR):os.makedirs(BACKUP_DIR)if os.path.exists(filename):modification_time = os.path.getmtime(filename)modification_time_str = datetime.fromtimestamp(modification_time).strftime('%Y%m%d%H%M%S')new_filename = f"{BACKUP_DIR}/{filename}_{modification_time_str}"try:shutil.move(filename, new_filename)LOGGER.info(f"文件已移动到 {new_filename}")except Exception as e:LOGGER.error(f"移动文件出错: {new_filename}, Error: {e}")if __name__ == "__main__":try:client = connect_to_server(SERVER_URL)root_node = get_root_node(client)objects_node = get_objects_node(client)backup_csv_file(CSV_FILENAME)with open(CSV_FILENAME, mode='w', newline='') as csvfile:num = 0while True:variables = get_variables(objects_node)if num == 1:writer = csv.DictWriter(csvfile, fieldnames=variables.keys())writer.writeheader()writer.writerow(variables)csvfile.flush()num += 1LOGGER.info("数据记录:" + str(num))time.sleep(1)except KeyboardInterrupt:print("程序被用户中断")finally:client.disconnect()相关文章:
【Python】FANUC机器人OPC UA通信并记录数据
目录 引言机器人仿真环境准备代码实现1. 导入库2. 设置参数3. 日志配置4. OPC UA通信5. 备份旧CSV文件6. 主函数 总结 引言 OPC UA(Open Platform Communications Unified Architecture)是一种跨平台的、开放的数据交换标准,常用于工业自动化…...

Linux 中断处理
一、基本概念 1、中断及中断上下文 中断是一种由硬件设备产生的信号,不同设备产生的中断通过中断号来区分。CPU在接收到中断信号后,根据中断号执行对应的中断处理程序(Interrupt Service Routine) 内核对异常和中断的处理类似&a…...

人大金昌netcore适配,调用oracle模式下存储过程\包,返回参数游标
using KdbndpConnection conn new KdbndpConnection("Host192.168.133.221;Port54321;Databasedb1;Poolingtrue;User IDsystem;Password123");conn.Open();//存储过程调用也是类似using var cmd conn.CreateCommand();cmd.CommandText "模式.包名称.存储过程…...

pandas常用的一些操作
EXCLE操作 读取Excel data1 pd.read_excel(excle_dir) 读Excel取跳过前几行: data1 pd.read_excel(excle_dir,skiprows1) 获取总行数 data1.shape[0] 获取总列数 data1.shape[1] 指定某列数据类型 data1 pd.read_excel("C:数据导入.xlsx",dtype…...
【鸿蒙开发】系统组件Row
Row组件 Row沿水平方向布局容器 接口: Row(value?:{space?: number | string }) 参数: 参数名 参数类型 必填 参数描述 space string | number 否 横向布局元素间距。 从API version 9开始,space为负数或者justifyContent设置为…...
Hadoop和zookeeper集群相关执行脚本(未完,持续更新中~)
1、Hadoop集群查看状态 搭建Hadoop数据集群时,按以下路径操作即可生成脚本 [test_1analysis01 bin]$ pwd /home/test_1/hadoop/bin [test_01analysis01 bin]$ vim jpsall #!/bin/bash for host in analysis01 analysis02 analysis03 do echo $host s…...
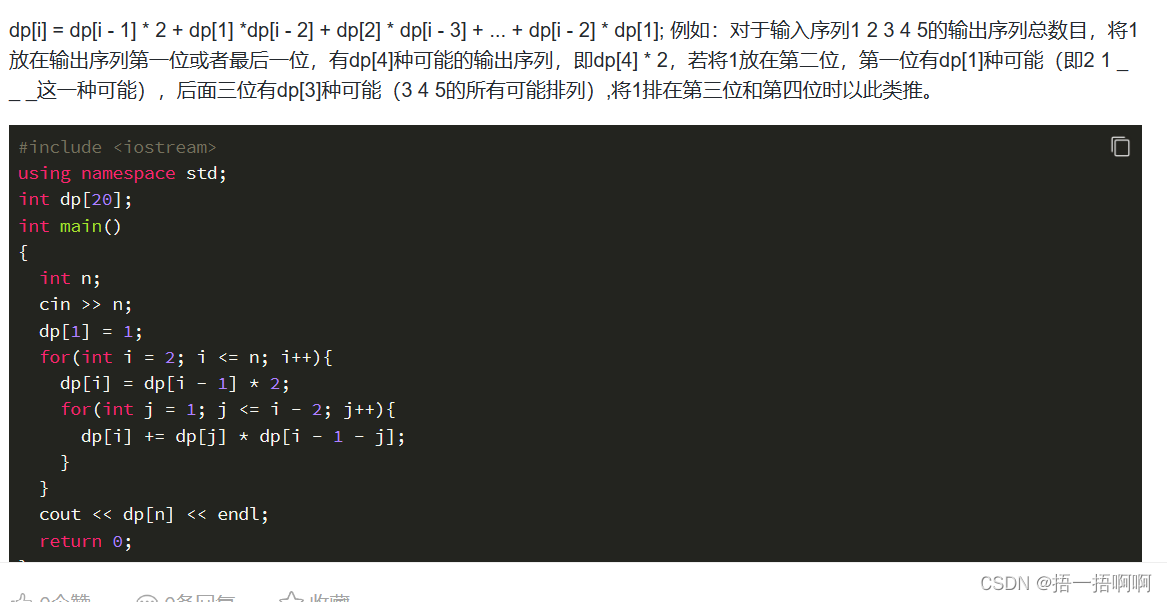
蓝桥杯算法题:栈(Stack)
这道题考的是递推动态规划,可能不是很难,不过这是自己第一次靠自己想出状态转移方程,所以纪念一下: 要做这些题目,首先要把题目中会出现什么状态给找出来,然后想想他们的状态可以通过什么操作转移…...

JavaWeb-监听器
文章目录 1.基本介绍2.ServletContextListener1.基本介绍2.创建maven项目,导入依赖3.代码演示1.实现ServletContextListener接口2.配置web.xml3.结果 3.ServletContextAttributeListener监听器1.基本介绍2.代码实例1.ServletContextAttributeListener.java2.配置web…...

系统架构设计基础知识
一. 系统架构概述系统架构的定义 系统架构(System Architecture)是系统的一种整体的高层次的结构表示,是系统的骨架和根基,支撑和链接各个部分,包括构件、连接件、约束规范以及指导这些内容设计与演化的原理࿰…...

Vue自定义指令介绍及使用方法
介绍 除了 Vue 内置的一系列指令 (比如 v-model 或 v-show) 之外,Vue 还允许你注册自定义的指令 (Custom Directives)。 之前已经介绍了两种在 Vue 中重用代码的方式:组件 和 组合式函数。组件是主要的构建模块,而组合式函数则侧重于有状态…...

React 组件生命周期函数的用法和示例代码
React 中的生命周期函数可以分为三个阶段:Mounting(挂载),Updating(更新)和 Unmounting(卸载)。每个阶段都有不同的函数,用于执行不同的操作。 Mounting(挂载…...
 to 0.0.0.0:80 failed (98: Address already in use))
【nginx运维】[emerg]: bind() to 0.0.0.0:80 failed (98: Address already in use)
关于nginx端口被占用的问题: If you get following error, when you try to start nginx… [emerg]: bind() to 0.0.0.0:80 failed (98: Address already in use) Then it means nginx or some other process is already using port 80. You can kill it using: su…...
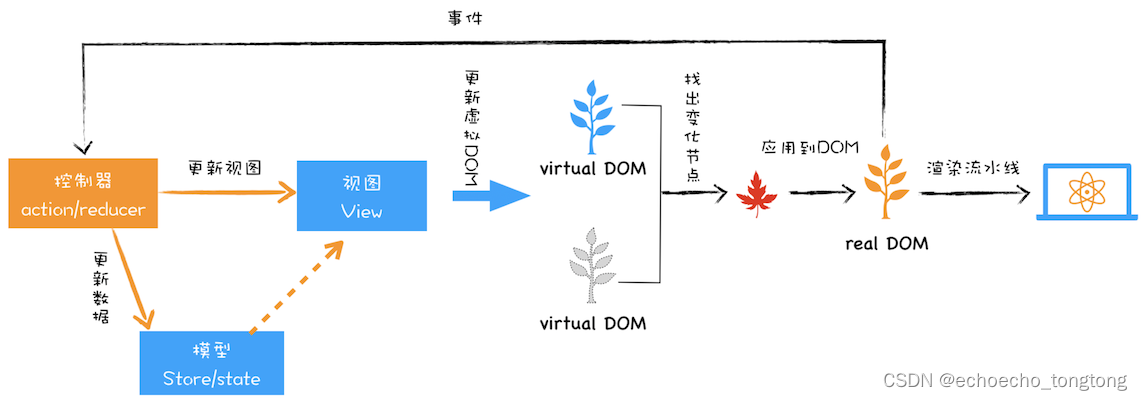
浏览器工作原理与实践--虚拟DOM:虚拟DOM和实际的DOM有何不同
虚拟DOM是最近非常火的技术,两大著名前端框架React和Vue都使用了虚拟DOM,所以我觉得非常有必要结合浏览器的工作机制对虚拟DOM进行一次分析。当然了,React和Vue框架本身所蕴含的知识点非常多,而且也不是我们专栏的重点,…...

arm工作模式、arm9通用寄存器、异常向量表中irq的异常向量、cpsr中的哪几位是用来设置工作模式以及r13,r14,15别名是什么?有什么作用?
ARM 首先先介绍一下ARM公司。 ARM成立于1990年11月,前身为Acorn计算机公司 主要设计ARM系列RISC处理器内核 授权ARM内核给生产和销售半导体的合作伙伴ARM公司不生产芯片 提供基于ARM架构的开发设计技术软件工具评估版调试工具应用软件总线架构外围设备单元等等CPU中…...
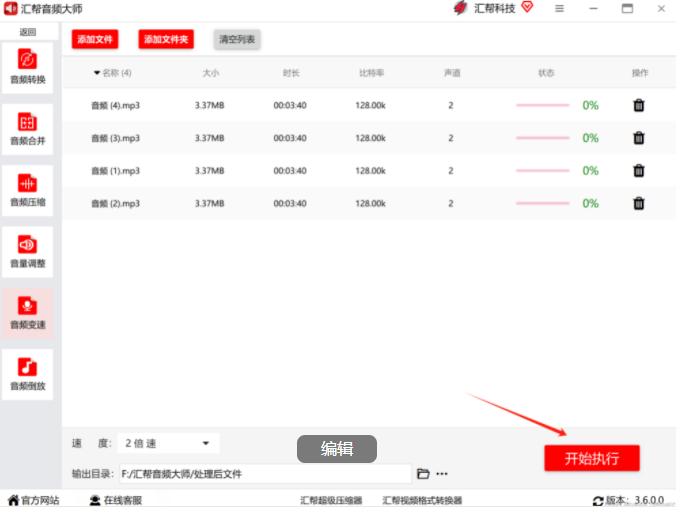
电脑上音频太多,播放速度又不一致,如何批量调节音频播放速度?
批量调节音频速度是现代音频处理中的一个重要环节,尤其在音乐制作、电影剪辑、有声书制作等领域,它能够帮助制作者快速高效地调整音频的播放速度,从而满足特定的制作需求。本文将详细介绍批量调节音频速度的方法、技巧和注意事项,…...
-扩展最后一个节)
pe格式从入门到图形化显示(十)-扩展最后一个节
文章目录 前言一、怎么扩展最后一个节?二、扩大节1.扩展节2.保存文件 前言 通过分析和解析Windows PE格式,并使用qt进行图形化显示 一、怎么扩展最后一个节? 在PE文件中,扩大最后一个节通常是通过修改PE文件头中的节表来实现的。…...

设计模式之创建型模式---建造者模式
文章目录 建造者模式概述经典的建造者模式建造者模式的变种总结 建造者模式概述 建造者模式是一种广泛使用的设计模式,在三方开源库和各种SDK中经常见到。建造者设计模式在四人帮的经典著作《设计模式:可复用面向对象软件基础》中被提及,它的…...

如何从零开始训练一个语言模型
如何从零开始训练一个语言模型 #mermaid-svg-gtUlIrFtNPw1oV5a {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-gtUlIrFtNPw1oV5a .error-icon{fill:#552222;}#mermaid-svg-gtUlIrFtNPw1oV5a .error-text{fill:#5522…...

Python 设计一个监督自己的软件1
基本要求:每做一件事,软件就会按照事情权重加相应的分数,总分数也会增加,要可视化页面 使用Python编写的一个简单的日常任务记录和评分系统,包括可视化页面。 首先,我们定义一个任务字典,其中包含各种日常任务及其对应的权重分数…...
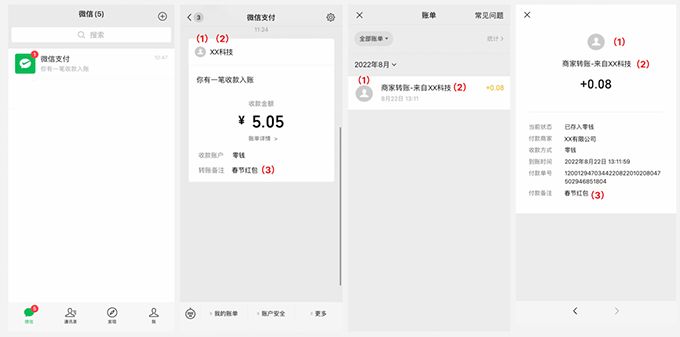
商家转账到零钱权限开通操作攻略
商家转账到零钱是什么? 商家转账到零钱是微信商户号里的一个功能,很早以前叫企业付款到零钱。 从2022年5月18日,原“企业付款到零钱”升级为“商家转账到零钱”,已开通商户的功能使用暂不受影响,新开通商户可前往「产…...

知识竞赛代表队分组方法详解
🎲 知识竞赛代表队分组方法详解公平 均衡 策略 让每一支队伍都在合适的起点🎯 引言知识竞赛中,代表队的合理分组是赛事公平与精彩的基础。无论是学校比赛、企业活动还是大型公开赛,组织者都需要根据队伍数量和赛制选择合适的分…...

路由器市场新机遇:从硬件到场景化解决方案的演进
1. 项目概述:一个被低估的“家门口”战场聊到路由器,很多人的第一反应可能是“运营商送的”、“能用就行”。确实,在过去很长一段时间里,家用Wi-Fi设备是一个典型的“黑盒”产品,用户对其性能、功能和体验的感知非常模…...

微软MOS认证-Word专家级|超全报考指南
不管是大学生还是职场人,Word 都是绕不开的工具。但多数人只会基础打字排版,面对长文档、规范报告时常常手忙脚乱。MOSWord 专家级认证,正是帮你把 “普通 Word” 变成 “高-效办公武器” 的实用路径。#微软mos认证 #大学生考证 #mos认证考试…...

C++二叉树控制台可视化:从递归布局到层序遍历的图形化实现
1. 项目概述:为什么我们需要“看见”二叉树?在C的学习和数据结构实践中,二叉树是一个绕不开的核心概念。我们经常需要实现它的插入、删除、遍历等操作。然而,无论是调试一个复杂的平衡算法,还是向他人展示你的数据结构…...

Linux服务器安全加固第一步:用好chattr隐藏权限和umask默认值
Linux服务器安全加固实战:chattr与umask的防御艺术 当一台裸机Linux服务器首次上线时,大多数管理员会立即部署防火墙、更新补丁和配置SSH密钥登录——这些确实是安全基础。但真正经历过服务器入侵事件的老手都知道,攻击者往往从最不起眼的文件…...

repomix:智能代码库混合工具,为AI编程与项目分析提供结构化输入
1. 项目概述:当代码库成为“黑盒”,我们需要一把钥匙 在软件开发的日常中,我们常常会面对一个既熟悉又头疼的场景:接手一个全新的、或者许久未碰的代码仓库。面对动辄几十上百个文件、错综复杂的目录结构,以及那些命名…...

2025届最火的十大AI写作平台实际效果
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 在这个信息呈现爆炸态势的时代当中,内容创作已然变成了个人以及企业所具备的核心…...

【大白话说Java面试题 第55题】【JVM篇】第15题:JVM有哪些垃圾收集算法?
📌 PDF:大白话说Java面试题 — 02-JVM篇 第15题:JVM有哪些垃圾收集算法 📚 回答: 核心概念: JVM 的垃圾收集算法是垃圾回收的核心机制,决定了如何高效地标记和回收内存中的垃圾对象。常见的垃…...
)
接口请求状态码 / 错误 极简速查表(前端自用版,好记够用)
一、HTTP 状态码4xx 客户端错误(前端自查)404:接口地址写错、路径不对、后端没这个接口400:请求参数格式错、少参、参数类型不对、传参名不匹配401:未登录 / Token 过期 / Token 没带403:有权限,…...

基于RAG与智能体技术构建法律领域AI应用实战指南
1. 项目概述:一个法律智能体的诞生最近在GitHub上看到一个挺有意思的项目,叫mileson/moticlaw。光看这个名字,可能有点摸不着头脑,但稍微拆解一下就能明白它的野心:“motic” 很可能是 “motion”(动议、提…...