【STM32】【HAL库】遥控关灯1主机
相关连接
【STM32】【HAL库】遥控关灯0 概述
【STM32】【HAL库】遥控关灯1主机
【STM32】【HAL库】遥控关灯2 分机
【STM32】【HAL库】遥控关灯3 遥控器
需求
主机需要以下功能:
- 接收来自物联网平台的命令
- 发送RF433信号给从机
- 接收RF433信号和红外信号
- 驱动舵机动作
方案设计
使用双MCU方案,ESP32C3负责物联网相关通信,STM32负责发送信号给从机和接收RF433的信号,还有舵机控制
本单使用ESP32即可,但手头的RF433的遥控器的协议不是常见的,没找到相关的解码库
而ESP32本人不算熟悉,经过测试没法成功解码,因此使用双MCU方案,后续可能会改进
ESP32与STM32直接使用串口通信
使用巴法云平台作为物联网平台,使用MQTT协议连接
硬件设计
433接收
使用XL700芯片(淘宝)(单价0.52)
电路是数据手册的参考电路,天线使用弹簧天线
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-YYm9ZLzX-1676130327907)(picture/1.png)]](https://img-blog.csdnimg.cn/4a2ba296a6044f93b59eb274c7d91344.png)
433发射
使用XL4456(淘宝)(单价0.47)
电路是数据手册的参考电路,天线使用弹簧天线
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-F40M8GrJ-1676130327908)(picture/2.png)]](https://img-blog.csdnimg.cn/a97d148593a749f9ba3d1d292cafebe9.png)
esp32
使用ESP32C3(单价10)(也可以使用esp8266模块,但手头无货,故使用这个芯片)
烧录时同时按下两个按键,先松开EN按键 2s以上后在松开Io9按键
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-z0vMwBYL-1676130327910)(picture/3.png)]](https://img-blog.csdnimg.cn/fe85ab88d2d7463ab8ea190375a82946.png)
stm32
最小系统设计
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-1lQqcCy7-1676130327912)(picture/4.png)]](https://img-blog.csdnimg.cn/7b774afb5e1a4264ac23d2bc821a2dc8.png)
电源
使用5v电源适配器
只需要在这里转3,3v即可
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-iWvjBAGo-1676130327912)(picture/5.png)]](https://img-blog.csdnimg.cn/48fc394552754caa8924f33f2b6fd03a.png)
其余接口
包括控制舵机的接口和红外接口
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ePYwmzg1-1676130327913)(picture/6.png)]](https://img-blog.csdnimg.cn/be631d18b7aa495299ee0215494dc3ae.png)
软件设计
协议
| 功能 | esp32串口输出代码 | 物联网平台代码 | stm32动作 |
|---|---|---|---|
| 主屋开 | 0xac0000 | H_ON | 操作舵机开灯 |
| 主屋关 | 0xac00ff | H_OFF | 操作舵机关灯 |
| 北屋开 | 0xac1100 | N_ON | 将串口代码通过RF433发射 |
| 北屋关 | 0xac11ff | N_OFF | 将串口代码通过RF433发射 |
| 南屋开 | 0xac2200 | S_ON | 将串口代码通过RF433发射 |
| 南屋关 | 0xac22ff | S_OFF | 将串口代码通过RF433发射 |
| 西屋开 | 0xac3300 | W_ON | 将串口代码通过RF433发射 |
| 西屋关 | 0xac33ff | W_OFF | 将串口代码通过RF433发射 |
| 全开 | 0xacff00 | ALL_ON | 分别发送各屋开灯代码 |
| 全关 | 0xacffff | ALL_OFF | 分别发送各屋关灯代码 |
esp32
环境
这里使用Arduino框架
请自行查询arduino的环境搭建
这里使用了一个第三方库(PubSubClient)来建立MQTT连接
这里提供zip文件(成品的github连接中),自行导入即可
如下图选择添加zip库,添加即可
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-1oUTd77Z-1676130327914)(picture/7.png)]](https://img-blog.csdnimg.cn/f2edb70d0f44447ba1813121a1e85979.png)
wifi连接
将esp32设置为sta模式,接入其他wifi
根据wifi的ssid和password接入
如下所示
const char *ssid = "";
const char *password = "";
void setupWifi() {WiFi.mode(WIFI_STA);esp_wifi_set_mac(WIFI_IF_STA, newMACAddress);Serial.println(WiFi.macAddress());Serial.print("Connecting to ");Serial.println(ssid);WiFi.begin(ssid, password);while (WiFi.status() != WL_CONNECTED) {delay(500);Serial.print(".");}Serial.println("");Serial.println("WiFi connected.");Serial.println("IP address: ");Serial.println(WiFi.localIP());
}
MQTT
云平台设置
使用的是巴法云的mqtt服务
巴法云设置,传送门
一般的MQTT有这么几个要素
设备id(mqtt_devid),产品id(mqtt_pubid),密钥信息(mqtt_password),主题名(mqtt_topic)
在巴法云中只用了设备ID和主题名(产品ID和密钥为空即可)
#define mqtt_devid "********" //设备ID
#define mqtt_pubid " " //产品ID
#define mqtt_password " " //鉴权信息
const char *mqtt_topic = "ESP32HomeRFLight2";设备ID是巴法云控制台中的这个红圈里的私钥
主题则是自己建立的主题名
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-BxBbVn7e-1676130327915)(picture/8.png)]](https://img-blog.csdnimg.cn/77888e7a09064cb4ac10171eabaf1995.png)
程序
连接函数
巴法云的MQTT连接地址是(bemfa.com),端口号是 9501
MQTT连接,传入链接地址端口,在传入设备信息,主题信息即可
注意设置回调函数(接收到信息时触发)(client.setCallback(callback)😉
void clientReconnect() {while (!client.connected()) //再重连客户端{delay(3000);client.setServer(mqtt_server, 9501); //设置客户端连接的服务器client.connect(mqtt_devid, mqtt_pubid, mqtt_password); //客户端连接到指定的产品的指定设备.同时输入鉴权信息client.subscribe(mqtt_topic);client.setCallback(callback); //设置好客户端收到信息是的回调Serial.println("reconnect MQTT...");if (client.connect(mqtt_devid, mqtt_pubid, mqtt_password)) {Serial.println("connected");} else {Serial.println("failed");Serial.println(client.state());}}
}
//收到主题下发的回调, 注意这个回调要实现三个形参 1:topic 主题, 2: payload: 传递过来的信息 3: length: 长度
void callback(char *topic, byte *payload, unsigned int length)
{}
在回调函数中需要对信息处理
首先把主题信息和数据信息提取出来,转化成string格式(可以用内置函数比较)
String topic_zj = "";String data_zj = "";for (size_t i = 0; i < strlen(topic); i++) {topic_zj += (char)topic[i];}for (size_t i = 0; i < length; i++) {data_zj += (char)payload[i];}
之后根据协议做比较即可
if (!topic_zj.compareTo(mqtt_topic)) {Serial.write(0xac);if (!data_zj.compareTo("H_ON")) {Serial.write(0x00);Serial.write(0x00);} else if (!data_zj.compareTo("H_OFF")) {Serial.write(0x00);Serial.write(0xFF);} else if (!data_zj.compareTo("N_ON")) {Serial.write(0x11);Serial.write(0x00);} else if (!data_zj.compareTo("N_OFF")) {Serial.write(0x11);Serial.write(0xFF);} else if (!data_zj.compareTo("S_ON")) {Serial.write(0x22);Serial.write(0x00);} else if (!data_zj.compareTo("S_OFF")) {Serial.write(0x22);Serial.write(0xFF);} else if (!data_zj.compareTo("W_ON")) {Serial.write(0x33);Serial.write(0x00);} else if (!data_zj.compareTo("W_OFF")) {Serial.write(0x33);Serial.write(0xFF);} else if (!data_zj.compareTo("ALL_ON")) {Serial.write(0xFF);Serial.write(0x00);} else if (!data_zj.compareTo("ALL_OFF")) {Serial.write(0xFF);Serial.write(0xFF);}}
esp32总程序
#include <PubSubClient.h>
#include <WiFi.h>
#include <esp_wifi.h>uint8_t newMACAddress[] = { 0xaa, 0xab, 0xac, 0xad, 0xae, 0xaf };
const char *ssid = "K2FeO4";
const char *password = "lxz123ac";
const char *mqtt_server = "bemfa.com"; //onenet 的 IP地址#define mqtt_devid "858e79b6f49d47fb90f2bd9f9ca2d331" //设备ID
#define mqtt_pubid " " //产品ID
#define mqtt_password " " //鉴权信息
const char *mqtt_topic = "ESP32HomeRFLight2";
WiFiClient espClient; //创建一个WIFI连接客户端
PubSubClient client(espClient); // 创建一个PubSub客户端, 传入创建的WIFI客户端char msg_buf[200]; //发送信息缓冲区void setupWifi() {WiFi.mode(WIFI_STA);esp_wifi_set_mac(WIFI_IF_STA, newMACAddress);Serial.println(WiFi.macAddress());Serial.print("Connecting to ");Serial.println(ssid);WiFi.begin(ssid, password);while (WiFi.status() != WL_CONNECTED) {delay(500);Serial.print(".");}Serial.println("");Serial.println("WiFi connected.");Serial.println("IP address: ");Serial.println(WiFi.localIP());
}//收到主题下发的回调, 注意这个回调要实现三个形参 1:topic 主题, 2: payload: 传递过来的信息 3: length: 长度
void callback(char *topic, byte *payload, unsigned int length) {String topic_zj = "";String data_zj = "";for (size_t i = 0; i < strlen(topic); i++) {topic_zj += (char)topic[i];}for (size_t i = 0; i < length; i++) {data_zj += (char)payload[i];}if (!topic_zj.compareTo(mqtt_topic)) {Serial.write(0xac);if (!data_zj.compareTo("H_ON")) {Serial.write(0x00);Serial.write(0x00);} else if (!data_zj.compareTo("H_OFF")) {Serial.write(0x00);Serial.write(0xFF);} else if (!data_zj.compareTo("N_ON")) {Serial.write(0x11);Serial.write(0x00);} else if (!data_zj.compareTo("N_OFF")) {Serial.write(0x11);Serial.write(0xFF);} else if (!data_zj.compareTo("S_ON")) {Serial.write(0x22);Serial.write(0x00);} else if (!data_zj.compareTo("S_OFF")) {Serial.write(0x22);Serial.write(0xFF);} else if (!data_zj.compareTo("W_ON")) {Serial.write(0x33);Serial.write(0x00);} else if (!data_zj.compareTo("W_OFF")) {Serial.write(0x33);Serial.write(0xFF);} else if (!data_zj.compareTo("ALL_ON")) {Serial.write(0xFF);Serial.write(0x00);} else if (!data_zj.compareTo("ALL_OFF")) {Serial.write(0xFF);Serial.write(0xFF);}}
}void sendTempAndHumi() {if (client.connected()) {Serial.print("public message:");client.publish("$dp", (uint8_t *)msg_buf, 3); //发送数据到主题$dp}
}//重连函数, 如果客户端断线,可以通过此函数重连
void clientReconnect() {while (!client.connected()) //再重连客户端{delay(3000);client.setServer(mqtt_server, 9501); //设置客户端连接的服务器client.connect(mqtt_devid, mqtt_pubid, mqtt_password); //客户端连接到指定的产品的指定设备.同时输入鉴权信息client.subscribe(mqtt_topic);client.setCallback(callback); //设置好客户端收到信息是的回调Serial.println("reconnect MQTT...");if (client.connect(mqtt_devid, mqtt_pubid, mqtt_password)) {Serial.println("connected");} else {Serial.println("failed");Serial.println(client.state());}}
}void setup() {// put your setup code here, to run once:// rtc_wdt_protect_off();// rtc_wdt_enable();// rtc_wdt_feed();// rtc_wdt_set_time(RTC_WDT_STAGE0, 8000);Serial.begin(115200);setupWifi(); //调用函数连接WIFIdelay(2000);clientReconnect();
}void loop() {// put your main code here, to run repeatedly:if (!WiFi.isConnected()) //先看WIFI是否还在连接{setupWifi();}if (!client.connected()) //如果客户端没连接ONENET, 重新连接{clientReconnect();}client.loop(); //客户端循环检测
}stm32
相关链接
用到了之前写的几个库
舵机驱动
NEC
RF433
舵机关灯思路
设计思路
需要:
接收RF433信号/红外,根据解码的信号控制舵机
接收来自串口信号,根据信号发送RF433或控制舵机
需要用到的外设及功能
定时器(3个)(红外433解码,合用一个,舵机控制一个,RF433发送的时序控制一个)
串口1个(与esp32通信)
GPIO(5个,后续详细说)
硬件看门狗
HAL初始化
定时器1
用作 红外和RF433解码的计时
需要分频后1us为周期,最大计数无需改变,开启溢出中断
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-LkSXEQuo-1676130327915)(picture/9.png)]](https://img-blog.csdnimg.cn/38781d424ff94d48ab3c86ca26e6ffcd.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rM7t2myC-1676130327916)(picture/10.png)]](https://img-blog.csdnimg.cn/dbd1cbe821024a7e944a2648a2280042.png)
定时器2
用作舵机控制的PWM生成
每隔20us触发一次中断
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-L6fP0vkC-1676130327916)(picture/11.png)]](https://img-blog.csdnimg.cn/2a6e1be87ab04fa3acecbf42ceaf6085.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-U7e4YdhY-1676130327917)(picture/12.png)]](https://img-blog.csdnimg.cn/7300a5118af64d21a5095655cd94556f.png)
定时器3
用作RF433信号发射时的计时
分频1us,计数值默认最大即可,开中断
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-NK734OrN-1676130327917)(picture/13.png)]](https://img-blog.csdnimg.cn/081e9a8c63984acbbaf98d438635fb98.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WaVZdcEq-1676130327918)(picture/14.png)]](https://img-blog.csdnimg.cn/2c96074b635743dd994ad309a5374a6d.png)
GPIO
LED:用作指示灯,推挽输出即可
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Wu93asXP-1676130327918)(picture/15.png)]](https://img-blog.csdnimg.cn/7ed899dbbbc0483ab7d675d5ff22d147.png)
GPIO
RF433输出
需要配置为推挽输出(开漏不行)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-vxdzvUSG-1676130327919)(picture/16.png)]](https://img-blog.csdnimg.cn/a2aeb50e54e94affbc8b10dc485a8988.png)
GPIO
舵机控制信号
配置为开漏浮空(外部接上拉电阻到5V),配置为最高等级(避免复位时让电机出现误动作)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tne6j7oG-1676130327919)(picture/17.png)]](https://img-blog.csdnimg.cn/4d5832624ea54d91b07b0052112feec9.png)
GPIO
RF433输入
配置为边沿中断模式
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-uTchpMON-1676130327920)(picture/18.png)]](https://img-blog.csdnimg.cn/03d95ca3240046b683aeb6701159a1f7.png)
GPIO
红外输入
配置为下降沿中断模式
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-l63PeSdI-1676130327921)(picture/19.png)]](https://img-blog.csdnimg.cn/44c5db1ac7944d4fa6a33d4b7eb57ebc.png)
注意开两个外部中断的中断设置
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Uu169nDs-1676130327921)(picture/20.png)]](https://img-blog.csdnimg.cn/9a196a7322284d28941637a915ce6648.png)
串口
开启中断,后面使用空闲中断来接收数据
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FTWQvzDw-1676130327921)(picture/21.png)]](https://img-blog.csdnimg.cn/08be4e2e6e8d47fc9d74758bfe2ab8fb.png)
硬件看门狗
32分频,溢出值4000
每(32/40k*4000=3.2s)触发一次
本程序目的是让程序每3.2s重启一次,因此只在需要操作舵机时喂狗,主循环无喂狗
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-LljvVjOh-1676130327922)(picture/22.png)]](https://img-blog.csdnimg.cn/017d023990a74206a93a0c6c6fa0c3c9.png)
程序
分为
- 红外和RF433的解码共用了一个定时器,需要做时序控制,让红外有输入时屏蔽RF433,避免出现问题(RF会有幻听,会阶段性输入高低电平)
- 接收来自RF433,串口,红外的数据,在主循环里根据不同的指令做发射信号/控制舵机的动作
中断回调函数(舵机/红外/RF433的驱动)
保存串口数据
调用之前的库文件
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if (htim == &htim1){}else if (htim == &htim2){if (M_EN == 1)Steering_Engine_Action();elseHAL_GPIO_WritePin(Steering_Engine_GPIOx, Steering_Engine_GPIO_Pin, GPIO_PIN_SET);}else if (htim == &htim3){}
}
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if (GPIO_Pin == GPIO_PIN_2) // 433{if (Input_EN == 1)if (IR_NEC_Read_ins == 0)if (RF_READ_OK == 0)RF_Read_Decode();}else if (GPIO_Pin == GPIO_PIN_3) // IR{if (Input_EN == 1)if (IR_NEC_Read_OK == 0)IR_NEC_Read_Decode(air);}
}
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{if (huart == &huart1){Uart1_OK = 1;HAL_UART_Transmit(&huart2, Uart1_Buf, Size, 0xfff);}
}
开关灯控制
详情原理见,传送门
void OPEN()
{M_EN = 1;HAL_IWDG_Refresh(&hiwdg);Steering_Engine_360(0, 30);HAL_Delay(500);HAL_IWDG_Refresh(&hiwdg);Steering_Engine_360(1, 40);HAL_Delay(80);HAL_IWDG_Refresh(&hiwdg);Steering_Engine_Stop();M_EN = 0;
}
void CLOSE()
{M_EN = 1;HAL_IWDG_Refresh(&hiwdg);Steering_Engine_360(1, 30);HAL_Delay(500);HAL_IWDG_Refresh(&hiwdg);Steering_Engine_360(0, 30);HAL_Delay(80);HAL_IWDG_Refresh(&hiwdg);Steering_Engine_Stop();M_EN = 0;
}
主循环内容,根据传入的信息判断
if (RF_READ_OK == 1){HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET);Input_EN = 0;if (RF_READ_data[0] == 0xac && RF_READ_data[1] == 0x01 && RF_READ_data[2] == 0x00)OPEN();else if (RF_READ_data[0] == 0xac && RF_READ_data[1] == 0x01 && RF_READ_data[2] == 0xff)CLOSE();HAL_IWDG_Refresh(&hiwdg);RF_READ_data[0] = 0;RF_READ_data[1] = 0;RF_READ_data[2] = 0;RF_READ_OK = 0;Input_EN = 1;HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET);}if (IR_NEC_Read_OK == 1){HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET);Input_EN = 0;// printf("%02X%02X%02X\r\n", RF_READ_data[0], RF_READ_data[1], RF_READ_data[2]);if (IR_NEC_Read_Dat[0] == 0x4D && IR_NEC_Read_Dat[1] == 0xb2 && IR_NEC_Read_Dat[2] == 0xa3 && IR_NEC_Read_Dat[3] == 0x5C)OPEN();else if (IR_NEC_Read_Dat[0] == 0x4D && IR_NEC_Read_Dat[1] == 0xb2 && IR_NEC_Read_Dat[2] == 0x59 && IR_NEC_Read_Dat[3] == 0xa6)CLOSE();if (IR_NEC_Read_Dat[0] == 0x84 && IR_NEC_Read_Dat[1] == 0xff && IR_NEC_Read_Dat[2] == 0x81 && IR_NEC_Read_Dat[3] == 0x7e)OPEN();else if (IR_NEC_Read_Dat[0] == 0x84 && IR_NEC_Read_Dat[1] == 0xff && IR_NEC_Read_Dat[2] == 0x01 && IR_NEC_Read_Dat[3] == 0xfe)CLOSE();HAL_IWDG_Refresh(&hiwdg);IR_NEC_Read_Dat[0] = 0;IR_NEC_Read_Dat[1] = 0;IR_NEC_Read_Dat[2] = 0;IR_NEC_Read_Dat[3] = 0;IR_NEC_Read_OK = 0;Input_EN = 1;HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET);}if (Uart1_OK == 1){Input_EN = 0;HAL_IWDG_Refresh(&hiwdg);HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET);if (Uart1_Buf[0] == 0xac && Uart1_Buf[1] != 0x00 && Uart1_Buf[1] != 0xFF){for (int i = 0; i < 3; i++)RF433_Buf[i] = Uart1_Buf[i];RF_Write_Send(RF433_Buf);}else if (Uart1_Buf[0] == 0xac && Uart1_Buf[1] == 0x00){if (Uart1_Buf[2] == 0x00)OPEN();else if (Uart1_Buf[2] == 0xff)CLOSE();}if (Uart1_Buf[0] == 0xac && Uart1_Buf[1] == 0xff){// HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET);if (Uart1_Buf[2] == 0x00){RF_Write_Send(Data_N_Open);HAL_IWDG_Refresh(&hiwdg);HAL_Delay(300);HAL_IWDG_Refresh(&hiwdg);RF_Write_Send(Data_S_Open);OPEN();}else if (Uart1_Buf[2] == 0xff){RF_Write_Send(Data_N_Close);HAL_IWDG_Refresh(&hiwdg);HAL_Delay(300);HAL_IWDG_Refresh(&hiwdg);RF_Write_Send(Data_S_Close);HAL_IWDG_Refresh(&hiwdg);CLOSE();}}HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET);Input_EN = 1;Uart1_OK = 0;HAL_UARTEx_ReceiveToIdle_IT(&huart1, Uart1_Buf, 20);}
注意,串口使用了空闲中断模式,鉴别不同数据帧
成品
另外app开发很简单,百度凑凑就行了,源码同样在GitHub上,请自行查看即可
GitHub
相关文章:
【STM32】【HAL库】遥控关灯1主机
相关连接 【STM32】【HAL库】遥控关灯0 概述 【STM32】【HAL库】遥控关灯1主机 【STM32】【HAL库】遥控关灯2 分机 【STM32】【HAL库】遥控关灯3 遥控器 需求 主机需要以下功能: 接收来自物联网平台的命令发送RF433信号给从机接收RF433信号和红外信号驱动舵机动作 方案设计…...

Java 初始化块
文章目录1、初识初始化块2、实例初始化块和构造器3、类初始化块1、初识初始化块 Java 使用构造器来对单个对象进行初始化操作,使用构造器先完成对整个 Java 对象的状态初始化,然后将 Java 对象返回给程序,从而让该 Java 对象的信息更加完整。…...
超详细讲解长度受限制的字符串函数(保姆级教程!!!)
超详细讲解长度受限制的字符串函数(保姆级教程!!!)长度受限制的字符串函数strncpy函数strncpy函数的使用strncpy函数的模拟实现strncat函数strncat函数的使用strncat函数的模拟实现strncmp函数strncmp函数的使用strncm…...
——cmd命令提示符,c#调用cmd)
【c#】c#常用小技巧方法整理(4)——cmd命令提示符,c#调用cmd
CMD命令是一种命令提示符,CMD是command的缩写,位于系统System32的目录下,是大多数Windows操作系统中可用的命令行解释器应用程序。用于执行输入的命令。其中大多数命令通过脚本和批处理文件自动执行任务,执行高级管理功能…...
在项目中遇到的关于form表单的问题
前言 以下内容都是基于element Plus 和 vue3 一个form-item校验两个下拉框 有时候不可避免会遇到需要一个form-item校验两个下拉框的情况,比如: 这种情况下传统的校验已经无法实现,需要通过form表单提供的自定义校验来实现。以上面的必填…...
德国奔驰、博世和保时捷的员工年薪有多少?
点击 欧盟IT那些事 关注我们公告:因企鹅审核规定,本公众号从《德国IT那些事》更名为《欧盟IT那些事》。从职场新人到总裁,一个个盘。位于德国斯图加特的梅赛德斯-奔驰集团及其子公司梅赛德斯-奔驰是世界最知名的汽车制造商之一。奔驰车代表着…...
Mybatis与微服务注册
目录 一,Springboot整合MybatisPlus 创建商品微服务子模块 二,SpringBoot整合Freeamarker 三、SpringBoot整合微服务 &gateway&nginx 整合微服务之商品服务zmall-product 创建并配置网关gateway服务 安装配置SwitchHosts 安装配置Windo…...

JAVA练习47-合并两个有序数组
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 目录 前言 一、题目-合并两个有序数组 1.题目描述 2.思路与代码 2.1 思路 2.2 代码 总结 前言 提示:这里可以添加本文要记录的大概内容: 2月11日练习…...
右键菜单管理 - Win系统
右键菜单管理 - Win系统前言软件工具管理右键菜单360右键管理右键管家前言 Windows系统可以借助软件工具对右键菜单进行管理,可对指定的右键菜单进行删除和恢复。下面以Win10系统为例介绍管理方法。 注意:使用本文提及的工具将某软件的右键菜单删除后&…...
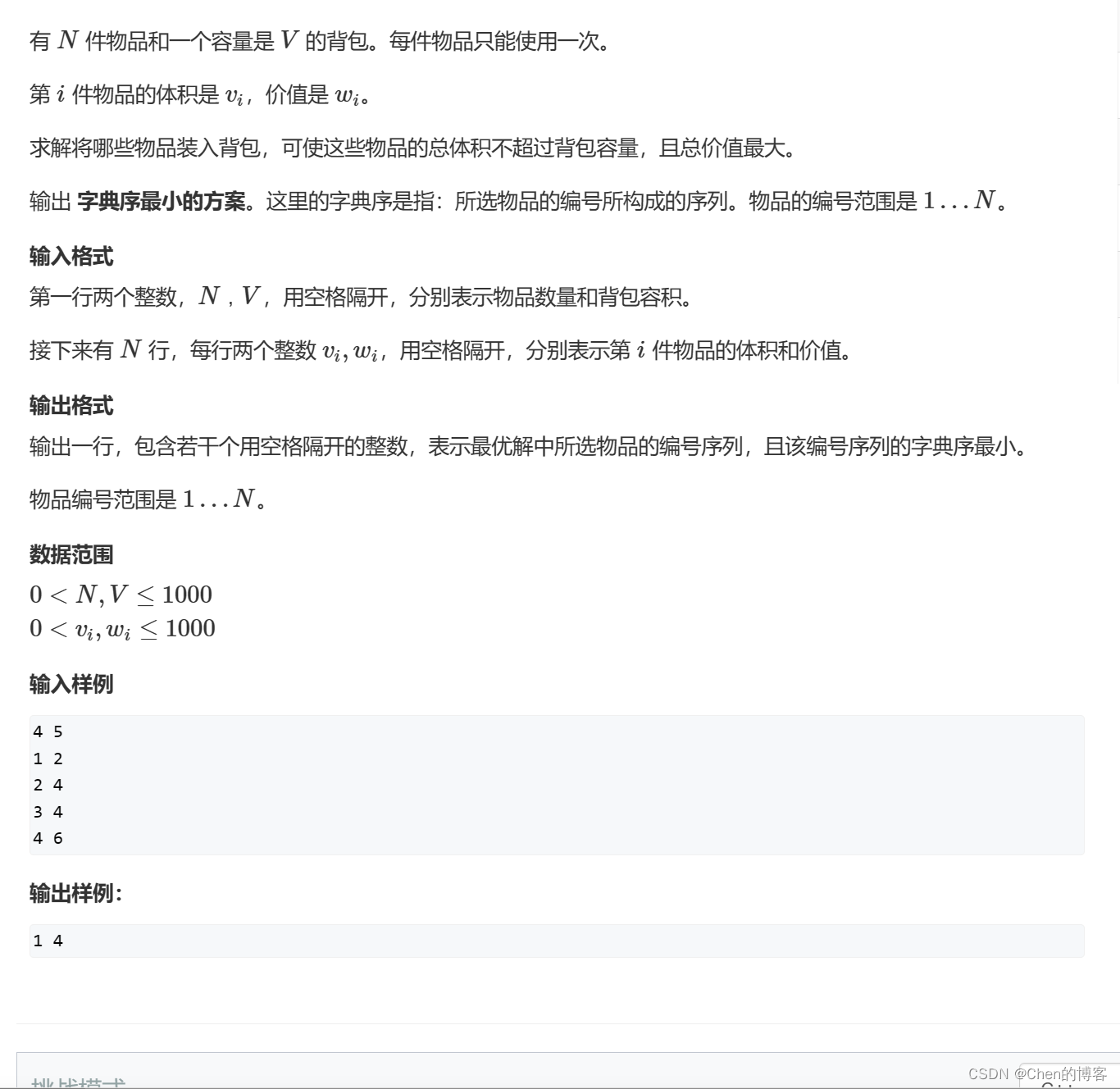
背包问题求方案数、具体方案
背包问题求方案数、具体方案01背包问题求体积恰好等于V的方案数完全背包问题求体积恰好等于V的方案数01背包问题求最优选法的方案数完全背包问题求最优选法的方案数01背包问题求具体方案01背包问题求体积恰好等于V的方案数 原题链接AcWing278. 数字组合 考虑状态表示&#x…...

电商导购CPS,淘宝联盟如何跟单实现用户和订单绑定
前言 大家好,我是小悟 做过自媒体的小伙伴都知道,不管是发图文还是发短视频,直播也好,可以带货。在你的内容里面挂上商品,你自己都不需要囤货,如果用户通过这个商品下单成交了,自媒体平台就会…...
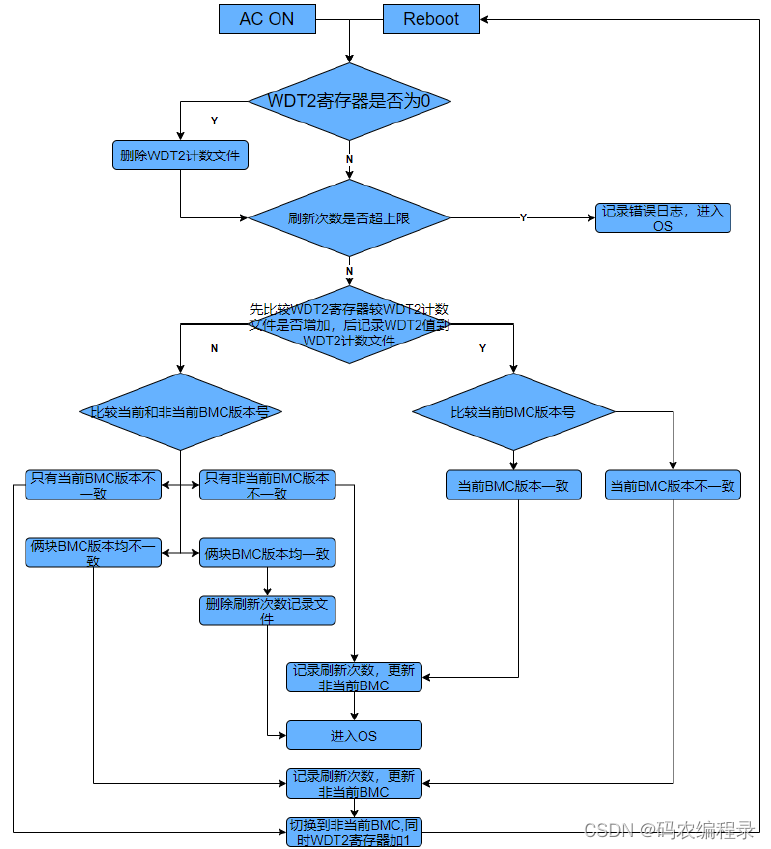
【Shell1】shell语法,ssh/build/scp/upgrade,环境变量,自动升级bmc,bmc_wtd,
文章目录1.shell语法:Shell是用C语言编写的程序,它是用户使用Linux的桥梁,硬件>内核(os)>shell>文件系统1.1 变量:readonly定义只读变量,unset删除变量1.2 函数:shell脚本传递的参数中包含空格&am…...

刷题记录:牛客NC208250牛牛的最美味和最不美味的零食
传送门:牛客 题目描述: 牛牛为了减(吃)肥(好),希望对他的零食序列有更深刻的了解,所以他把他的零食排成一列,然后对每一 个零食的美味程度都打了分,现在他有可能执行两种操作&…...
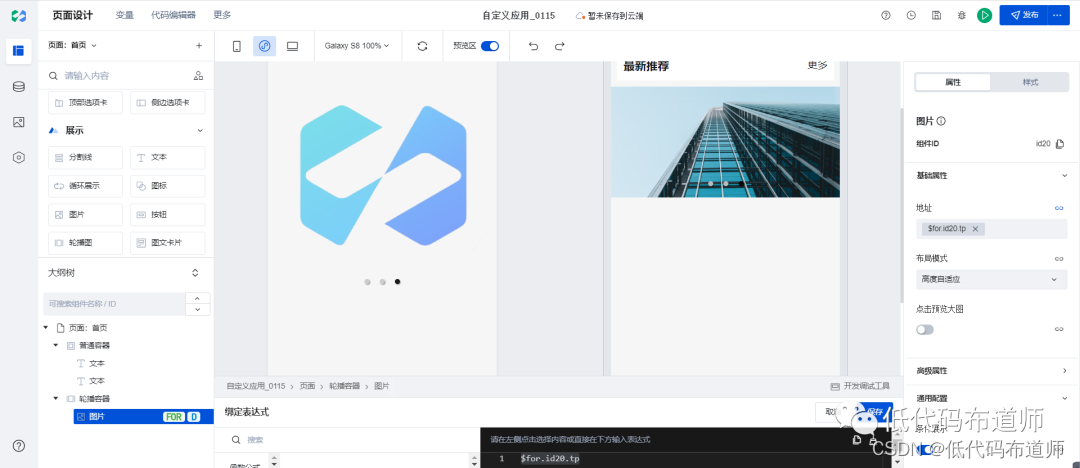
微搭低代码从入门到精通08-轮播容器
我们上一篇讲解了基础布局组件,讲解了普通容器和文本组件的用法,本篇我们继续介绍布局组件。 小程序中经常会有个功能是轮播图展示的功能,多张图片可以顺序进行切换。我们学习使用轮播容器的时候,先考虑切换的图片从哪来…...
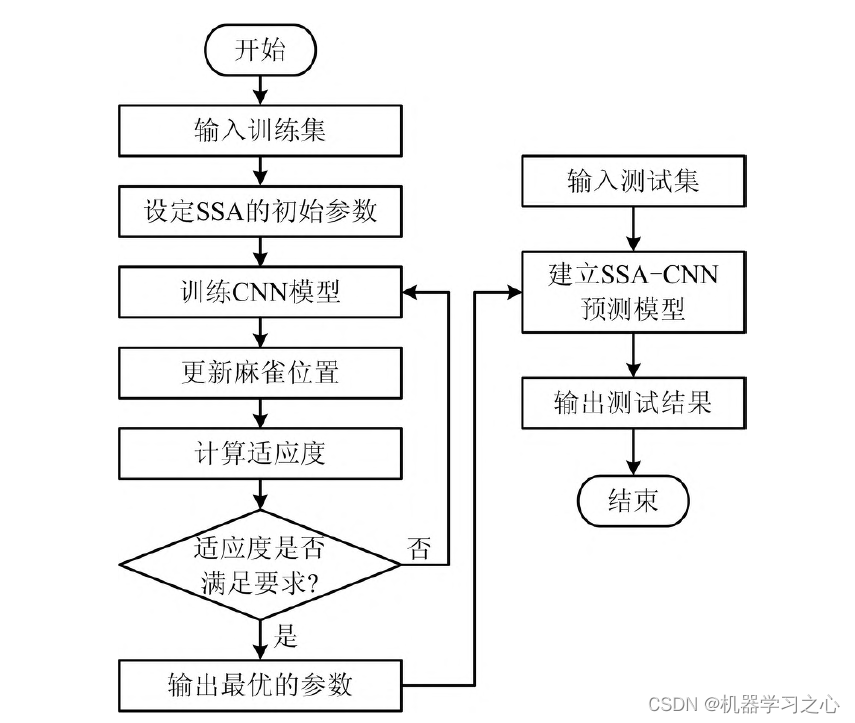
分类预测 | MATLAB实现SSA-CNN麻雀算法优化卷积神经网络多特征分类预测
分类预测 | MATLAB实现SSA-CNN麻雀算法优化卷积神经网络多特征分类预测 目录分类预测 | MATLAB实现SSA-CNN麻雀算法优化卷积神经网络多特征分类预测分类效果基本介绍模型描述程序设计参考文献分类效果 基本介绍 1.Matlab实现SSA-CNN麻雀算法优化卷积神经网络多特征分类预测&…...
华为10年经验测试工程师,整理出来的python自动化测试实战
前言 全书共分11章,第一章是基础,了selenium家谱,各种组件之间的关系以及一些必备知识。第二章告诉如何开始用python IDLE写程序以及自动化测试环境的搭建。第三章是webdriver API,我花了相当多时间对原先的文档,冗余…...

OpenCV杂谈 - 如何导出图像到内存中其他结构
前言 最近在net环境使用OpenCV,记录些疑难杂点. 一、OpenCV主要结构 Mat 二、Cols,Rows 和 Width,Hight 三、导入\导出到内存中其他结构 四、按矩形 在Mat之间复制 总结 一、OpenCV主要结构 Mat Mat是OpenCV中的主要结构. 主要有两个用途. 1 存储图片信息,2 存…...
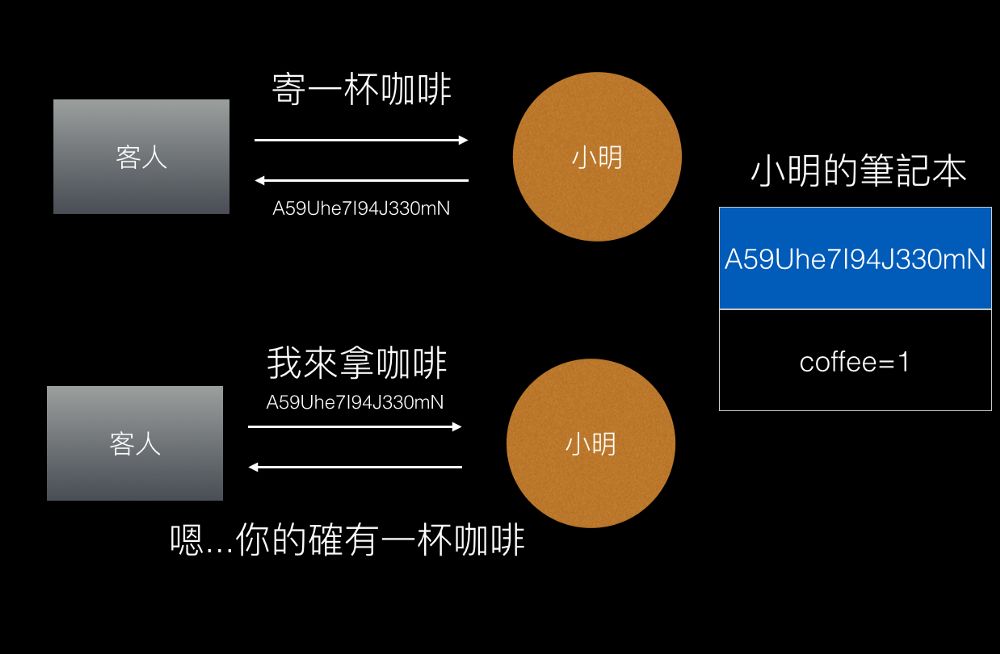
Session与Cookie的区别(四)
咖啡寄杯的烦恼 虽然店里生意还可以,但小明无时无刻不想着怎么样发大财赚大钱,让店里的生意变得更好。 他观察到最近好多便利商店开始卖起了咖啡,而且时不时就买一送一或是第二件半价,并且贴心地提供了寄杯的服务。 寄杯就是指说你…...

Linux 文件锁 - fcntl
什么是文件锁? 即锁住文件,不让其他程序对文件做修改! 为什么要锁住文件? 案例,有两个程序,都对一个文件做写入操作。 #include <unistd.h> #include <stdio.h> #include <stdlib.h> …...

CellularAutomata元胞向量机-2-初等元胞自动机MATLAB代码分享
%% 二维元胞自动机%imagesc(a)的色度矩阵a中0->256由蓝变黄% 规则,先把中间点置为1,每一时间每一点如果%周围八个点和为偶数,则变为0,为奇数则变为 1% 颜色控制clc, clearMap [1 1 1; 0 0 0];% [0 0 0] is black, [1 1 1] is …...
-跨公司销售)
SAP-MM:公司间交易(STO)-跨公司销售
一、引言:当销售公司没有库存,怎么办? 假设这样一个场景:你所在的集团有两个法人实体——A 公司负责市场销售,与客户关系紧密,但本身不生产也不持有库存;B 公司是生产基地,拥有所有…...

手把手教你用STM32CubeMX配置LCD1602显示:HAL库驱动移植+Proteus 8.12仿真
STM32CubeMX与Proteus联合开发:LCD1602显示实战指南 在嵌入式开发领域,STM32CubeMX和Proteus的组合为开发者提供了从硬件配置到软件仿真的完整解决方案。本文将深入探讨如何利用这两个工具链实现LCD1602液晶显示屏的驱动与显示功能,特别针对从…...

解决Windows端口转发难题:PortProxyGUI的可视化管理方案
解决Windows端口转发难题:PortProxyGUI的可视化管理方案 【免费下载链接】PortProxyGUI A manager of netsh interface portproxy which is to evaluate TCP/IP port redirect on windows. 项目地址: https://gitcode.com/gh_mirrors/po/PortProxyGUI 在网络…...

3分钟快速上手:DouYinBot抖音无水印视频下载终极指南 [特殊字符]
3分钟快速上手:DouYinBot抖音无水印视频下载终极指南 🚀 【免费下载链接】DouYinBot 抖音无水印下载 项目地址: https://gitcode.com/gh_mirrors/do/DouYinBot 在短视频内容创作和分享的时代,如何快速获取无水印的抖音视频成为创作者和…...
)
【2026年最新600套毕设项目分享】springboot基于深度学习的蘑菇种类识别系统(14260)
有需要的同学,源代码和配套文档领取,加文章最下方的名片哦 一、项目演示 项目演示视频 二、资料介绍 完整源代码(前后端源代码SQL脚本)配套文档(LWPPT开题报告/任务书)远程调试控屏包运行一键启动项目&…...

60个AI核心概念,不背定义,全落到工作场景!老王手把手教你建知识库、搭Agent,附原型库+PRD模板
💡 Chunking 文档分块 你的 RAG 知识库上线了,用户问一个具体问题,系统返回了一段莫名其妙的内容。一查发现,检索到的文档片段被切在了一个句子中间,上半句话在一个块里,下半句在另一个块里。模型看到半句…...

BAAI/bge-m3应用案例:在文档检索系统中实现精准语义匹配
BAAI/bge-m3应用案例:在文档检索系统中实现精准语义匹配 1. 项目背景与核心价值 在当今信息爆炸的时代,企业和个人都面临着海量文档管理的挑战。传统的关键词搜索方式已经无法满足精准检索的需求,特别是在处理专业术语、同义词和跨语言文档…...

复杂网络演化博弈代码:从nw小世界网络到互动创新社区知识共享研究
复杂网络演化博弈代码 nw小世界网络 复现文章 基于网络演化博弈的互动创新社区用户 知识共享行为影响因素研究 An evolutionary analysis on the effect of government policies on electric vehicle diffusion in complex network ()最近在研究一些关于复杂网络演化博弈的有趣…...

ChatTTS 小说播音参数优化指南:如何实现自然流畅的语音合成
最近在做一个有声小说项目,尝试了多种语音合成方案,最终发现 ChatTTS 在中文小说播音的灵活性和自然度上表现相当不错。不过,刚上手时,直接使用默认参数生成的语音总感觉“味儿不对”,要么像机器人念稿,要么…...

【PyTorch 3.0终极性能开关】:静态图分布式训练源码级调优指南——绕过Autograd重写、规避TensorGuard冗余拷贝、精准控制Fusion边界
第一章:PyTorch 3.0静态图分布式训练架构概览PyTorch 3.0 引入了原生静态图(Static Graph)支持,通过 TorchDynamo Inductor 的编译栈实现高性能图优化,并与分布式训练深度协同。该架构将模型定义、图捕获、分区调度与…...