ubuntu20.04 安裝PX4 1.13
step1_install_depenences.sh
#!/bin/bash
#install gazebo 11
#install protobuf 3.19.6python3 -m pip install --upgrade pip
python3 -m pip install --upgrade Pillow# 將 empy 的版本調整爲3.3.4
pip3 uninstall empy
pip3 install empy==3.3.4sudo apt-get update
sudo apt-get upgrade
sudo apt-get install aptitude
sudo apt install gitstep2_install_gazebo_ros.sh
#!/bin/bash# 雖然已經安裝裏gazebo 11 但是報錯找不到gazeboConfig.cmake 依照網上的建議安裝
sudo apt install ros-$ROS_DISTRO-gazebo*step3_install_GStreamer1.0.sh
# 需要安裝 GStreamer1.0
#https://github.com/PX4/PX4-Autopilot/issues/13117sudo apt install libgstreamer1.0-dev
sudo apt install gstreamer1.0-plugins-good
sudo apt install gstreamer1.0-plugins-bad
sudo apt install gstreamer1.0-plugins-uglystep4_git_clone.sh
#!/bin/bashexport WS_DIR="/home/hao/Documents/wks_third_party"
export GIT_DIR=$WS_DIR/resource_source/PX4/v1_13_3
rm $GIT_DIR
mkdir $GIT_DIR -p
cd $GIT_DIRgit clone https://github.com/PX4/PX4-Autopilot.git --recursive -b v1.13.3step5_git_version.sh
#!/bin/bashexport WS_DIR="/home/hao/Documents/wks_third_party"
export Autopilot_DIR=$WS_DIR/resource_source/PX4/v1_13_3/PX4-Autopilot
cd $Autopilot_DIRgit status
git branch -r | grep "release"
echo "----------------before check out--------------------------------------------------------"git checkout origin/release/1.13echo "----------------after check out--------------------------------------------------------"git status
step6_config_ubuntu.sh
#!/bin/bashset -o errexit
set -o verbose
export WS_DIR="/home/hao/Documents/wks_third_party"
export Autopilot_DIR=$WS_DIR/resource_source/PX4/v1_13_3/PX4-Autopilotcd $Autopilot_DIR/Tools/setupbash $Autopilot_DIR/Tools/setup/ubuntu.sh --fix-missing
step7_build_gazebo.sh
#!/bin/bashexport WS_DIR="/home/hao/Documents/wks_third_party"
export Autopilot_DIR=$WS_DIR/resource_source/PX4/v1_13_3/PX4-Autopilot
cd $Autopilot_DIRmake px4_sitl_default gazebostep8_run_with_launch.sh
export WS_DIR="/home/hao/Documents/wks_third_party"
export Autopilot_DIR=$WS_DIR/resource_source/PX4/v1_13_3/PX4-Autopilotsource $Autopilot_DIR/Tools/setup_gazebo.bash $Autopilot_DIR $Autopilot_DIR/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$Autopilot_DIR
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$Autopilot_DIR/Tools/sitl_gazebo
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$Autopilot_DIR/Tools/simulation-ignitionroslaunch px4 mavros_posix_sitl.launch相关文章:

ubuntu20.04 安裝PX4 1.13
step1_install_depenences.sh #!/bin/bash #install gazebo 11 #install protobuf 3.19.6python3 -m pip install --upgrade pip python3 -m pip install --upgrade Pillow# 將 empy 的版本調整爲3.3.4 pip3 uninstall empy pip3 install empy3.3.4sudo apt-get update sudo ap…...
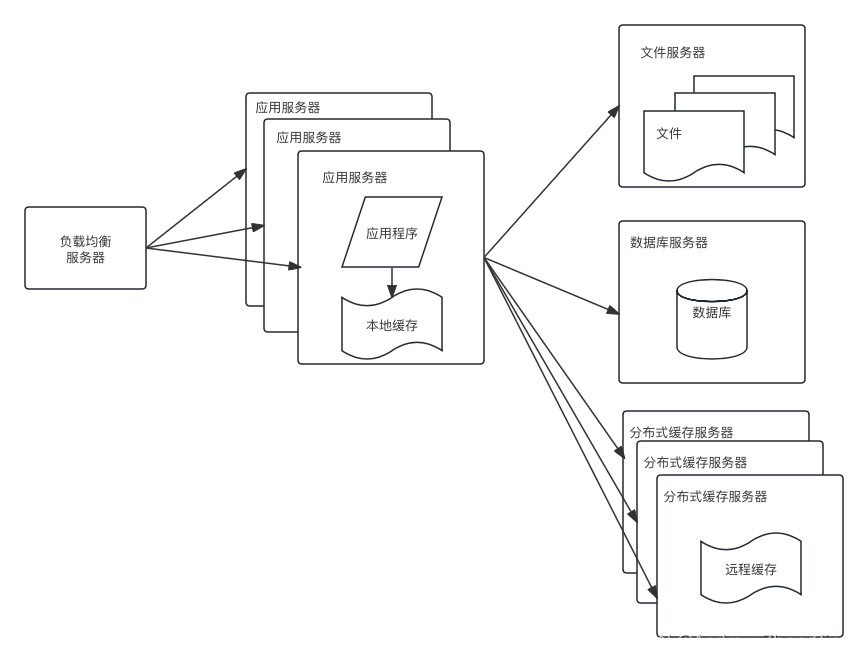
大型网站系统架构演化
大型网站质量属性优先级:高性能 高可用 可维护 应变 安全 一、单体架构 应用程序,数据库,文件等所有资源都在一台服务器上。 二、垂直架构 应用和数据分离,使用三台服务器:应用服务器、文件服务器、数据服务器 应用服…...
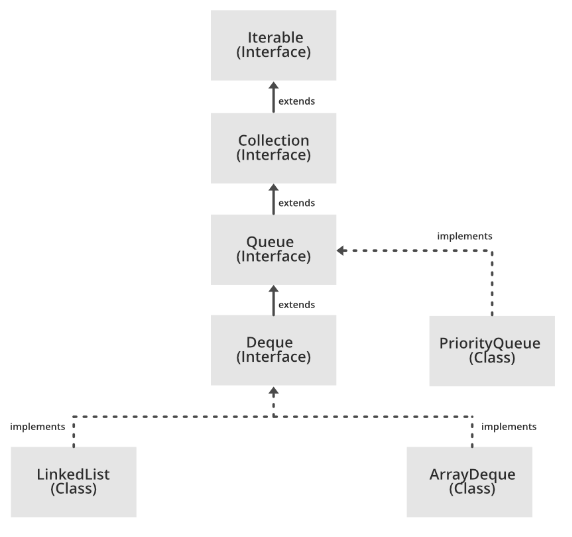
探索Java中的栈:Stack与Deque(ArrayDeque和LinkedList)
文章目录 1. 栈(Stack)1.1 定义方式1.2 特点1.3 栈的层次结构 2. 双端队列(Deque)2.1 定义方式及继承关系2.2 特点:2.3 ArrayDeque2.4 LinkedList2.5 Deque 的各种方法2.6 如何选择ArrayDeque和LinkedList 3. 如何选择…...

实践笔记-03 docker buildx 使用
docker buildx 使用 1.启用docker buildx2.启用 binfmt_misc3.从默认的构建器切换到多平台构建器3.1创建buildkitd.toml文件(私有仓库是http没有证书的情况下,需要配置)3.2创建构建器并使用新创建的构建器 4.构建多架构镜像并推送至harbor仓库…...

【数据结构与算法】之8道顺序表与链表典型编程题心决!
个人主页:秋风起,再归来~ 数据结构与算法 个人格言:悟已往之不谏,知来者犹可追 克心守己,律己则安! 目录 1、顺序表 1.1 合并两个有序数组 1.2 原地移除数组中所有的元素va…...

Go 源码之旅-开篇
欢迎来到《Go 源码之旅》专栏!在这个专栏中,我们将深入探索 Go 编程语言的内部数据结构的工作原理,一起踏上一段令人兴奋的源码之旅。 我们将一步步解析关键的数据结构底层工作原理以及一些常用框架的设计原理及其源码。 无论你是初学者还是…...

spring的事件推送
本质上是设计模式中的观察者模式。 一、什么是观察者模式 观察者模式是一种行为型设计模式,它定义了一种一对多的依赖关系,当一个对象的状态发生改变时,其所有依赖者都会收到通知并自动更新。 二、什么是spring的事件推送 在 Spring 的事…...

计算机网络—HTTPS协议详解:工作原理、安全性及应用实践
🎬慕斯主页:修仙—别有洞天 ♈️今日夜电波:ヒューマノイド—ずっと真夜中でいいのに。 1:03━━━━━━️💟──────── 5:06 🔄 ◀️ ⏸…...

卫星遥感影像在农业方面的应用及评价
一、引言 随着科技的进步,卫星遥感技术在农业领域的应用越来越广泛。卫星遥感技术以其宏观、快速、准确的特点,为农业生产和管理提供了有力的技术支撑。本文将对卫星遥感在农业方面的应用进行详细介绍,并通过具体案例进行说明。 二、…...
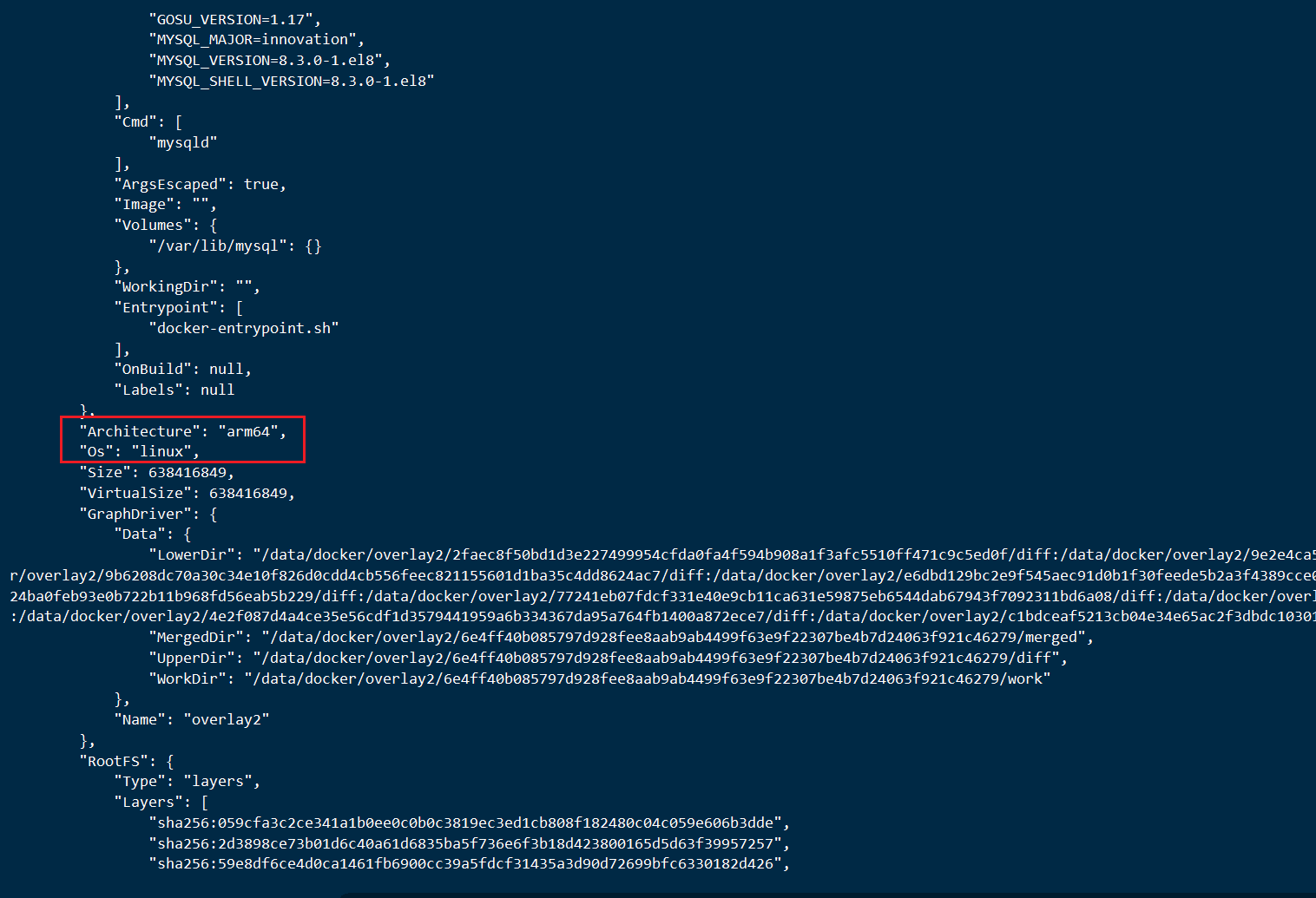
docker pull镜像的时候指定arm平台
指定arm平台 x86平台下载arm平台的镜像包 以mysql镜像为例 docker pull --platform linux/arm64 mysqldocker images查看镜像信息 要查看Docker镜像的信息,可以使用docker inspect命令。这个命令会返回镜像的详细信息,包括其元数据和配置。 docker i…...

如何通过OceanBase V4.2 动态采样优化查询性能
OceanBase v4.2 推出了优化器动态采样的功能,在SQL运行过程中,该功能会收集需要的统计信息,协助优化器制定出更好的执行计划,进一步提升了查询性能。 影响查询性能的因素是什么?为何你的优化器效果不佳? …...
Vue3---基础1(认识,创建)
变化 相对于Vue2,Vue3的变化: 性能的提升 打包大小减少 41% 初次渲染快 55%,更新渲染快133% 内存减少54% 源码的升级 使用 proxy 代替 defineProperty 实现响应式 重写虚拟 DOM 的实现和 Tree-shaking TypeScript Vue3就可以更好的支持TypeSc…...

JAVA集合ArrayList
目录 ArrayList概述 add(element) 用法 add(index, element)用法 remove(element)用法 remove(index)用法 get(index)用法 set(index,element) 练习 test1 定义一个集合,添加字符串,并进行遍历&…...

Bitmap OOM
老机器Bitmap预读仍然OOM,无奈增加一段,终于不崩溃了。 if (Build.VERSION.SDK_INT < 21)size 2; 完整代码: Bitmap bitmap; try {//Log.e(Thread.currentThread().getStackTrace()[2] "", surl);URL url new URL(surl);…...

基于深度学习的人脸表情识别系统(PyQT+代码+训练数据集)
基于深度学习的人脸表情识别系统(PyQT代码训练数据集) 前言一、数据集1.1 数据集介绍1.2 数据预处理 二、模型搭建三、训练与测试3.1 模型训练3.2 模型测试 四、PyQt界面实现 前言 本项目是基于mini_Xception深度学习网络模型的人脸表情识别系统&#x…...

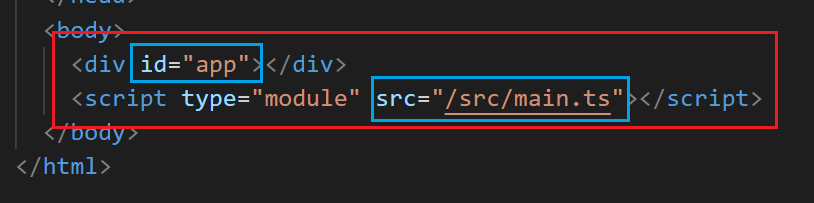
Qt 中的项目文件解析和命名规范
🐌博主主页:🐌倔强的大蜗牛🐌 📚专栏分类:QT❤️感谢大家点赞👍收藏⭐评论✍️ 目录 一、Qt项目文件解析 1、.pro 文件解析 2、widget.h 文件解析 3、main.cpp 文件解析 4、widget.cpp…...

【chatGPT】我:在Cadence Genus软件中,出现如下问题:......【4】
我 在Cadence Genus中,tcl代码为:foreach clk $clk_list{ set clkName [lindex $clk_list 0] set targetFreq [lindex $clk_list 1] set uncSynth [lindex $clk_list 4] set clkPeriod [lindex “%.3f” [expr 1 / $targetFreq]] … } 以上代码出现如下…...
在JAVA中的应用)
单例模式(Singleton Pattern)在JAVA中的应用
在软件开发中,设计模式是解决特定问题的一种模板或者指南。它们是在多年的软件开发实践中总结出的有效方法。JAVA设计模式广泛应用于各种编程场景中,以提高代码的可读性、可维护性和扩展性。本文将介绍单例模式,这是一种常用的创建型设计模式…...

手把手教你创建新的OpenHarmony 三方库
创建新的三方库 创建 OpenHarmony 三方库,建议使用 Deveco Studio,并添加 ohpm 工具的环境变量到 PATH 环境变量。 创建方法 1:IDE 界面创建 在现有应用工程中,新创建 Module,选择"Static Library"模板&a…...

从零开始,如何成功进入IT行业?
0基础如何进入IT行业? 简介:对于没有任何相关背景知识的人来说,如何才能成功进入IT行业?是否有一些特定的方法或技巧可以帮助他们实现这一目标? 在当今数字化时代,IT行业无疑是一个充满活力和机遇的领域。…...

基于MCP协议构建AI知识库:Alexandria项目部署与核心工作流解析
1. 项目概述:让AI拥有自己的“亚历山大图书馆”如果你和我一样,长期与各种AI助手(比如Claude、Cursor、Codex)打交道,肯定会遇到一个头疼的问题:知识无法沉淀。今天你花半小时教会AI助手某个项目的架构细节…...

动态自适应网络:让AI模型根据输入复杂度智能调节算力与精度
1. 项目概述:当计算机视觉遇见能效瓶颈在边缘计算和移动设备上部署深度神经网络(DNN)进行计算机视觉任务,比如人脸识别、物体检测,已经不是什么新鲜事了。但一个老生常谈的痛点始终横在那里:算力、功耗和精…...

从零到一:使用DaVinci Developer进行AUTOSAR SWC设计与ECU集成
1. 认识AUTOSAR与DaVinci Developer工具 第一次接触汽车电子开发的朋友,可能会被AUTOSAR这个术语吓到。其实它就像汽车软件界的"普通话"——各家厂商用统一的标准交流,避免出现"鸡同鸭讲"的情况。而DaVinci Developer就是Vector公司…...

消息中间件控制平面:统一管理RabbitMQ与Kafka的声明式解决方案
1. 项目概述:一个面向开发者的消息中间件控制平面最近在折腾微服务架构下的消息通信,发现一个挺普遍的问题:虽然像 RabbitMQ、Kafka、RocketMQ 这类消息中间件本身功能强大,但管理起来却是个麻烦事。配置分散在各个服务的代码里&a…...
)
【UWB-IMU、UWB定位】【UWB-IMU】融合仅具有测距和6轴IMU传感器数据的位置信息研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

大模型应用开发,常用框架汇总
大模型应用开发所涉及的工具和框架,非常的多,且技术更新非常之快。很难全面梳理技术栈全景图。 上一期文章,按照六层框架梳理了全景图,本期文章又收集了一些零散的信息,可以对上一期的架构图各个层级,做个补…...

ANSYS Workbench网格进阶:巧用‘Face Meshing’与‘Sweep’扫掠,让你的轴承座仿真既快又准
ANSYS Workbench网格进阶:巧用‘Face Meshing’与‘Sweep’扫掠提升轴承座仿真效率 轴承座作为机械传动系统中的关键部件,其应力分布与变形分析的准确性直接影响设备可靠性评估。传统四面体网格虽能快速生成,但在应力集中区域往往需要极高密度…...

深入解析Arm架构TLB维护机制与A64指令集
1. TLB维护机制基础解析在处理器架构中,TLB(Translation Lookaside Buffer)是内存管理单元(MMU)的核心组件,负责缓存虚拟地址到物理地址的转换结果。当CPU需要访问内存时,首先会查询TLB获取地址…...

开发者技能图谱:如何利用GitHub仓库系统化规划技术学习路径
1. 项目概述:一个面向开发者的技能图谱与学习路径仓库最近在GitHub上闲逛,发现了一个挺有意思的仓库,叫tayyabexe/skills。乍一看名字,你可能会觉得这又是一个“Awesome-XXX”式的资源列表合集。但点进去仔细研究后,我…...

终极指南:如何将ideas-for-projects-people-would-use中的创意变为现实
终极指南:如何将ideas-for-projects-people-would-use中的创意变为现实 【免费下载链接】ideas-for-projects-people-would-use Every time I have an idea, I write it down. These are a collection of my top software ideas -- problems I think enough people …...