云计算:Linux 部署 OVS 集群(控制端)实现OpenFlow
目录
一、实验
1.环境
2.Linux 部署 OVS 集群(控制端)
3.控制端对接服务端OVS网元
4.服务端OVS添加流表
5.服务端删除OVS
二、问题
1. ODL如何查找已安装插件
2.查看流表显示不全
3.如何删除OVS流表
一、实验
1.环境
(1) 主机
表1 宿主机
| 主机 | 架构 | 软件 | IP | 网卡 | 备注 |
| ovs_controller | 控制端 | karaf 0.7.3 | 192.168.204.63 | 1个NAT网卡 (204网段) | |
| ovs_server01 | 服务端 | OpenvSwitch v2.5.1 | 192.168.204.61 | 1个NAT网卡 (204网段), 1个仅主机网卡 (88网段) | 已部署 |
| ovs_server02 | 服务端 | OpenvSwitch v2.5.1 | 192.168.204.62 | 1个NAT网卡 (204网段), 1个仅主机网卡 (88网段) | 已部署 |
表2 目标云主机
| 云主机 | IP | 备注 |
| cloudserver01 | 172.16.1.1 | 宿主机ovs_server01 |
| cloudserver02 | 172.16.1.2 | 宿主机ovs_server02 |
(2) 查看IP
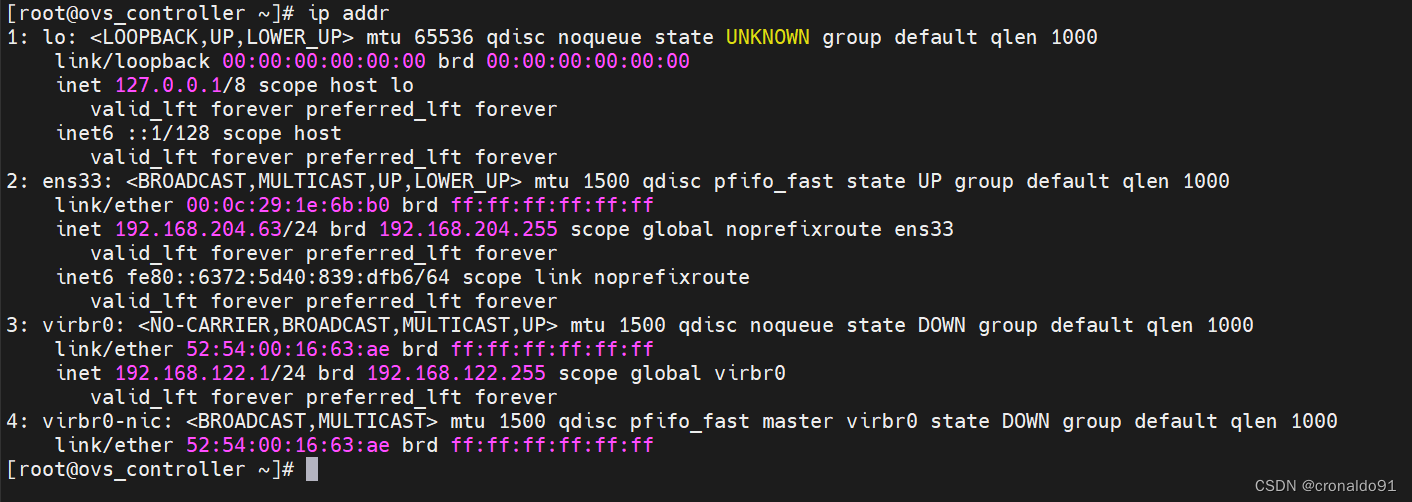
ovs_controller
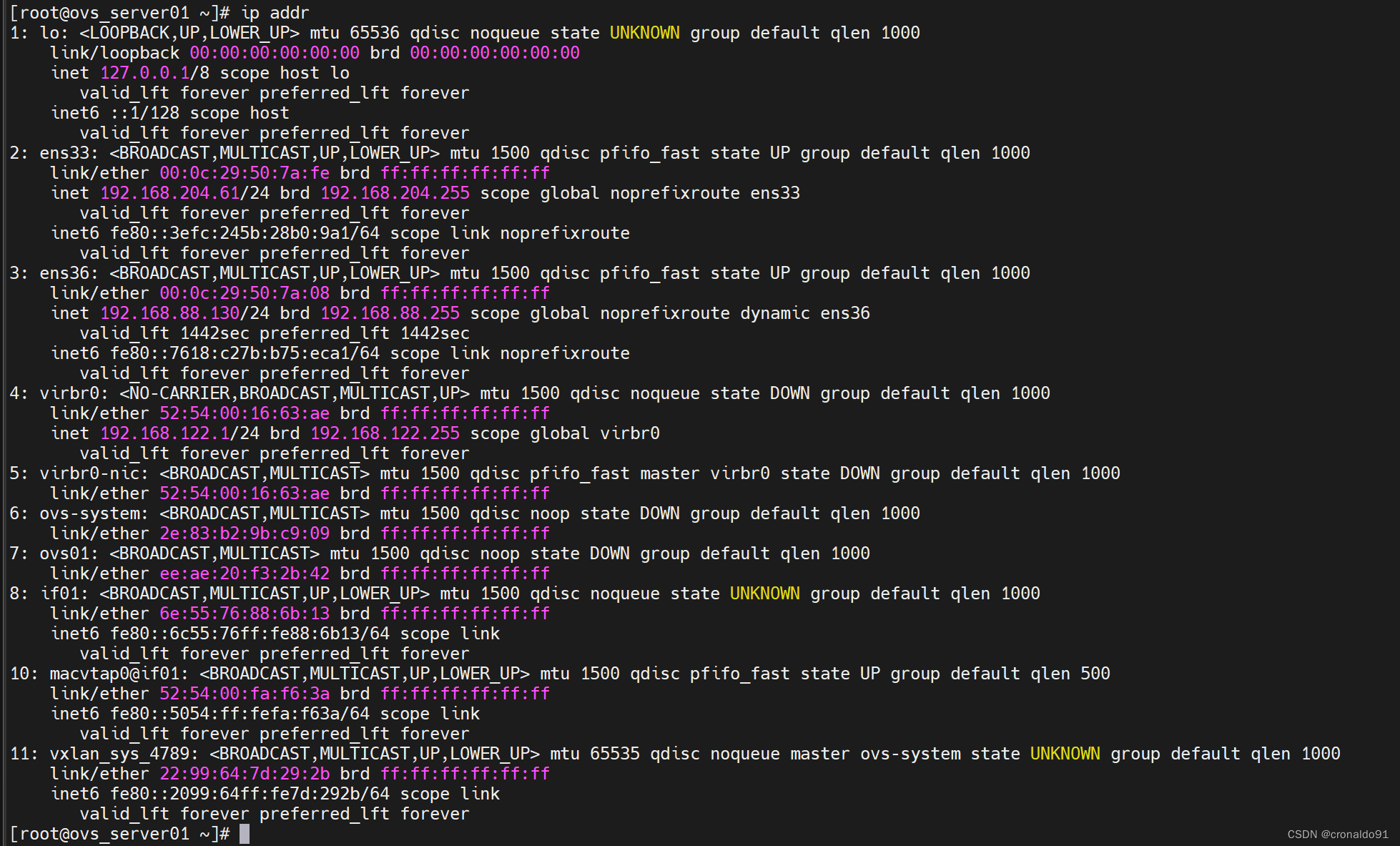
ovs_server01
ovs_server02

(3)查看OVS
ovs-vsctl showovs_server01

ovs_server02

(4)打印OVS的汇总信息
ovs_server01
ovs-appctl fdb/show ovs01

ovs_server02
ovs-appctl fdb/show ovs02

2.Linux 部署 OVS 集群(控制端)
(1)查阅OpenDaylight
1)下载
https://docs.opendaylight.org/en/latest/downloads.html2)按照说明
https://docs.opendaylight.org/en/latest/getting-started-guide/installing_opendaylight.html(2)创建目录
mkdir /opt/java
(3)jre解压
cp server-jre-8u301-linux-x64.tar.gz /opt/javacd /opt/javatar -zxvf server-jre-8u301-linux-x64.tar.gz
(4)修改环境变量
vim /etc/profile
……export JAVA_HOME=/opt/java/jdk1.8.0_301export JRE_HOME=/opt/java/jdk1.8.0_301export CLASSPATH=$JRE_HOME/lib/rt.jar:$JRE_HOME/lib/extexport PATH=$PATH:$JRE_HOME/bin![]()

(5)更新环境变量
source /etc/profile![]()
(6)odl解压
unzip karaf-0.7.3.zip

(7)关闭防⽕墙
systemctl stop firewalld.service
systemctl disable firewalld.service
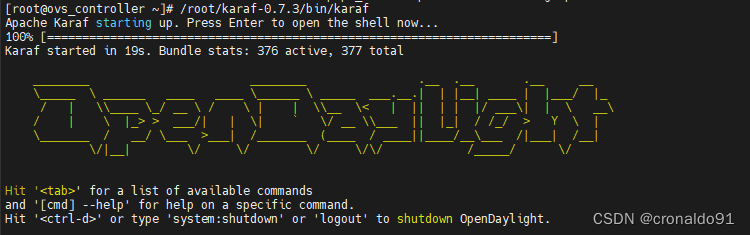
(8)开启ODL服务
/root/karaf-0.7.3/bin/karaf
(9)按照特性功能插件
feature:install odl-restconf
feature:install odl-l2switch-switch-ui
feature:install odl-mdsal-apidocs
feature:install odl-dluxapps-applications
feature:install odl-dluxapps-yangui
feature:install odl-restconf-all

(10)访问
http://192.168.204.63:8181/index.html#/login
(11)登录
账户: admin
密码: admin
进入系统

3.控制端对接服务端OVS网元
(1)服务端添加云交换机
ovs_server01
ovs-vsctl add-br ovs11
ovs-vsctl show

ovs_server02
ovs-vsctl add-br ovs12
ovs-vsctl show

(2)服务端云交换机添加控制器
ovs_server01
ovs-vsctl set-controller ovs11 tcp:192.168.204.63:6633
ovs-vsctl show

ovs_server02
ovs-vsctl set-controller ovs12 tcp:192.168.204.63:6633
ovs-vsctl show

(3)ODL查看
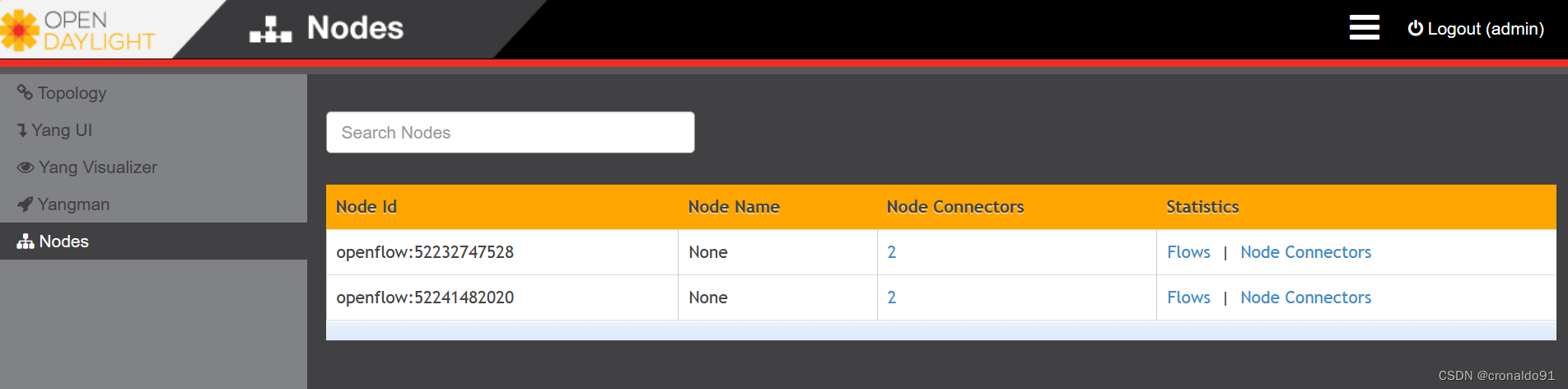
Nodes节点信息

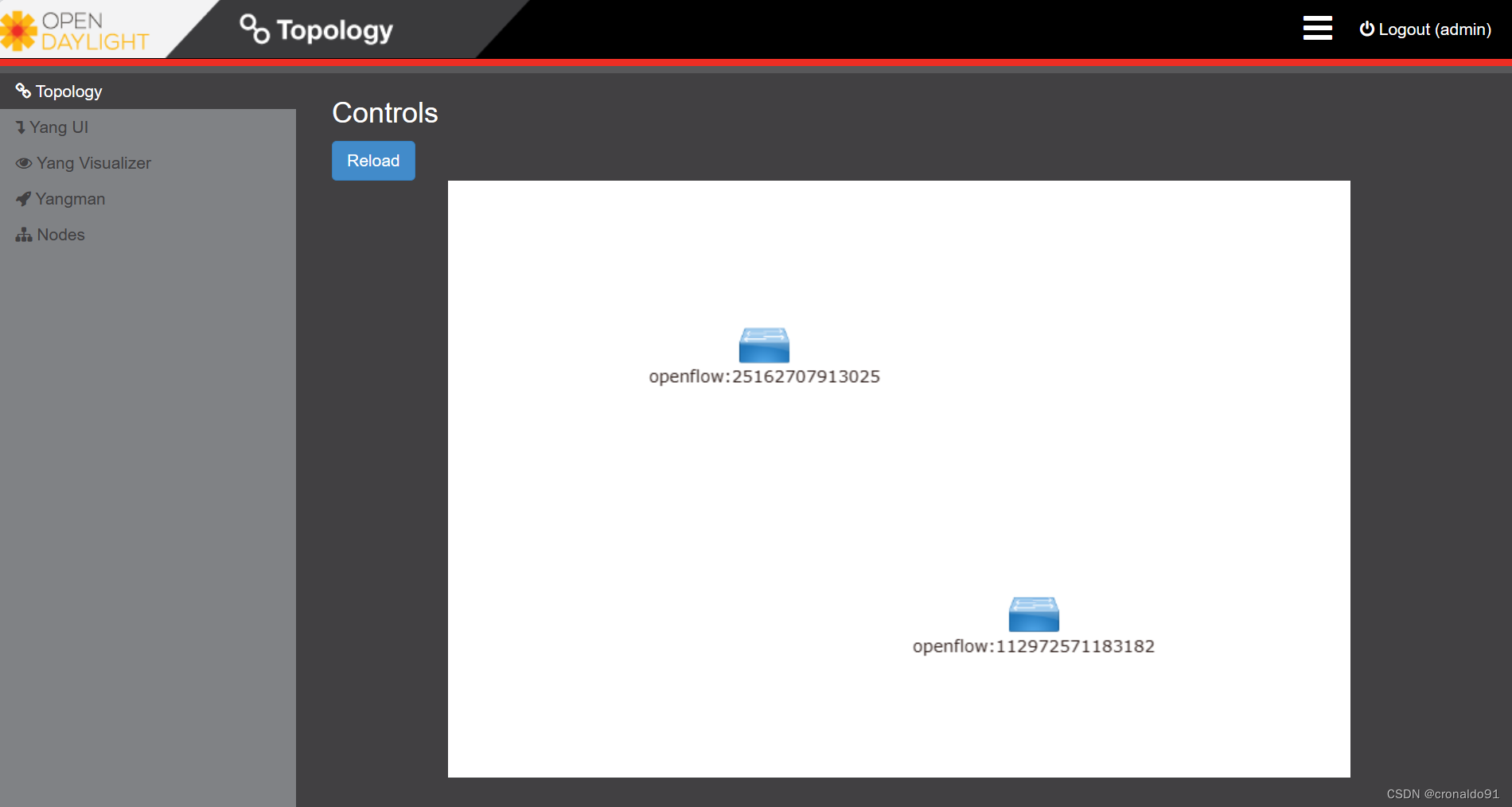
Topology拓扑信息
(4)服务端查看网络信息
ovs_server01的仅主机网卡为ens36
 ovs_server02的仅主机网卡为ens36
ovs_server02的仅主机网卡为ens36

(5)服务端云交换机添加物理端⼝(仅主机网卡)
ovs_server01
ovs-vsctl add-port ovs11 ens36
ovs-vsctl show

ovs_server02
ovs-vsctl add-port ovs12 ens36
ovs-vsctl show

(6)ODL查看
Nodes节点连接变为2
 Topology拓扑信息变为连接状态
Topology拓扑信息变为连接状态

(7) 查看OVS流表节点
ovs_server01
ovs-ofctl show ovs11 -O OpenFlow13

ovs_server02
ovs-ofctl show ovs12 -O OpenFlow13


(8) 查看OVS流表信息
ovs_server01
ovs-ofctl dump-flows ovs11 -O OpenFlow13
ovs_server02
ovs-ofctl dump-flows ovs12 -O OpenFlow13
(9)LLDP流量抓包
ovs_server01 的MAC地址为00:0c:29:50:7a:08,openflow流表为52232747528

ovs_server02的MAC地址为 00:0c:29:d5:c1:24 ,openflow流表为52241482020

(9)服务端云交换机添加接口
ovs_server01
ovs-vsctl add-port ovs11 if11 -- set interface if11 type=internal
ovs-vsctl show

ovs_server02
ovs-vsctl add-port ovs12 if12 -- set interface if12 type=internal
ovs-vsctl show

(9)ODL查看
Nodes节点连接变为3

(10) 查看OVS流表节点
ovs_server01
ovs-ofctl show ovs11 -O OpenFlow13
 ovs_server02
ovs_server02
ovs-ofctl show ovs12 -O OpenFlow13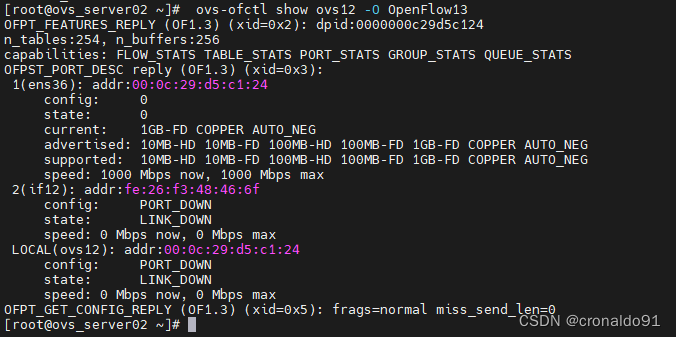

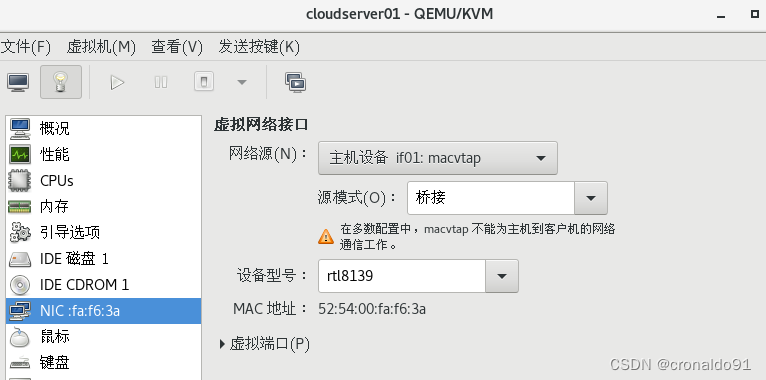
(11)cloudserver01云主机修改网卡
进入

已关闭

修改网卡为if11
开机(选择命令行模式)

进入系统
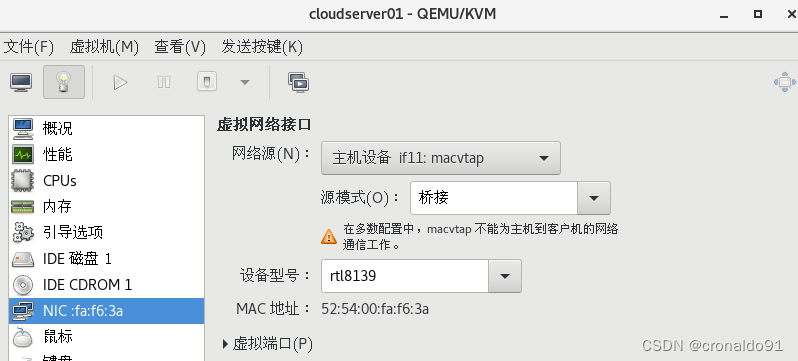
(12)cloudserver02云主机修改网卡
进入

已关闭
修改网卡为if12

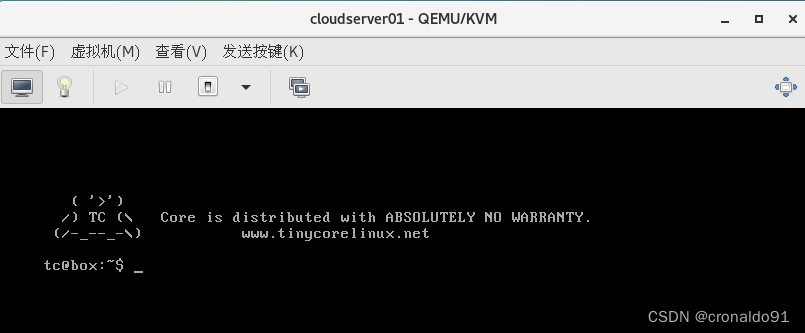
开机(选择命令行模式)

进入系统

(13)云主机修改网卡
cloudserver01
sudo ifconfig eth0 172.16.1.1 netmask 255.255.255.0 cloudserver02
cloudserver02
sudo ifconfig eth0 172.16.1.2 netmask 255.255.255.0
(14)测试网络
云主机1 ping 云主机2 ,目前不通

4.服务端OVS添加流表
(1) 查看OVS流表节点
ovs_server01
ovs-ofctl show ovs11 -O OpenFlow13
ovs_server02的云主机需要从2口进,1口出
ovs-ofctl show ovs12 -O OpenFlow13
(2)流量分析
表3 流量分析
| 云主机cloudserver01 | 流向 | 云主机cloudserver01 |
| in_port=2,action=output:1 | → | in_port=1,action=output:2 |
| in_port=1,action=output:2 | ← | in_port=2,action=output:1 |
(3)服务端添加流表
ovs_server01
ovs-ofctl add-flow ovs11 -O Openflow13 in_port=1,action=output:2
ovs-ofctl add-flow ovs11 -O Openflow13 in_port=2,action=output:1

ovs_server02
ovs-ofctl add-flow ovs12 -O Openflow13 in_port=1,action=output:2
ovs-ofctl add-flow ovs12 -O Openflow13 in_port=2,action=output:1

(3) 查看OVS流表信息
ovs_server01
ovs-ofctl dump-flows ovs11 -O OpenFlow13
ovs_server02
ovs-ofctl dump-flows ovs12 -O OpenFlow13
(4) 测试网络
云主机1 ping 云主机2 ,目前已通

5.服务端删除OVS
(1) 云主机关机
cloudserver01
cloudserver02

(2)云主机切换原网卡
cloudserver01
cloudserver02

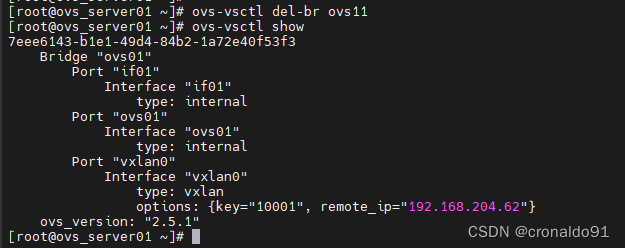
(3)服务端删除云交换机
ovs_server01
ovs-vsctl del-br ovs11
ovs-vsctl show
ovs_server02
ovs-vsctl del-br ovs12
ovs-vsctl show

(4)查看ODL
目前为空

二、问题
1. ODL如何查找已安装插件
(1)开启
/root/karaf-0.7.3/bin/karaf
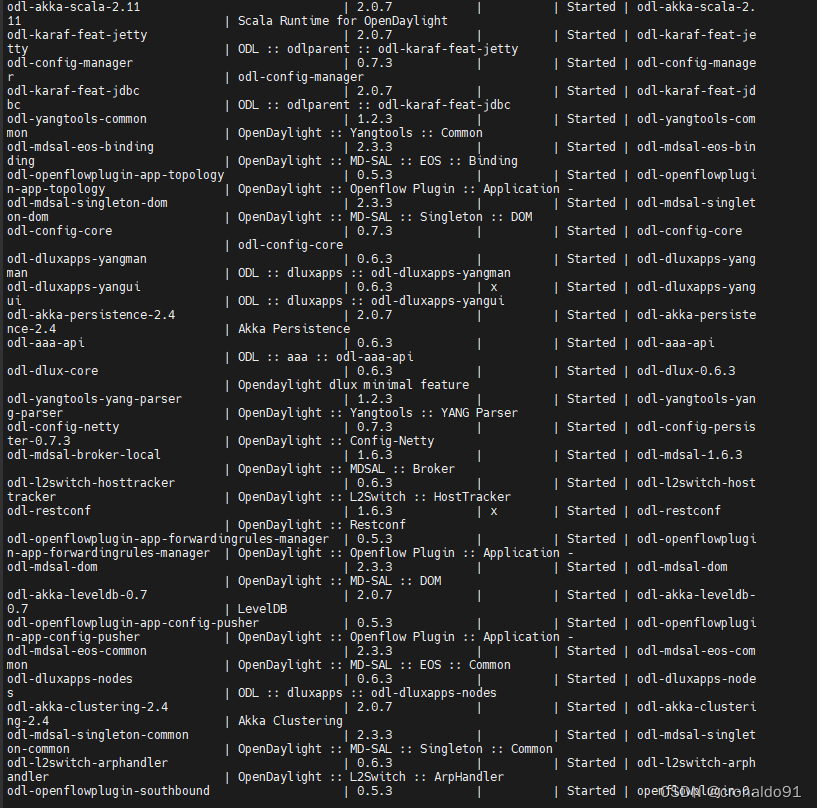
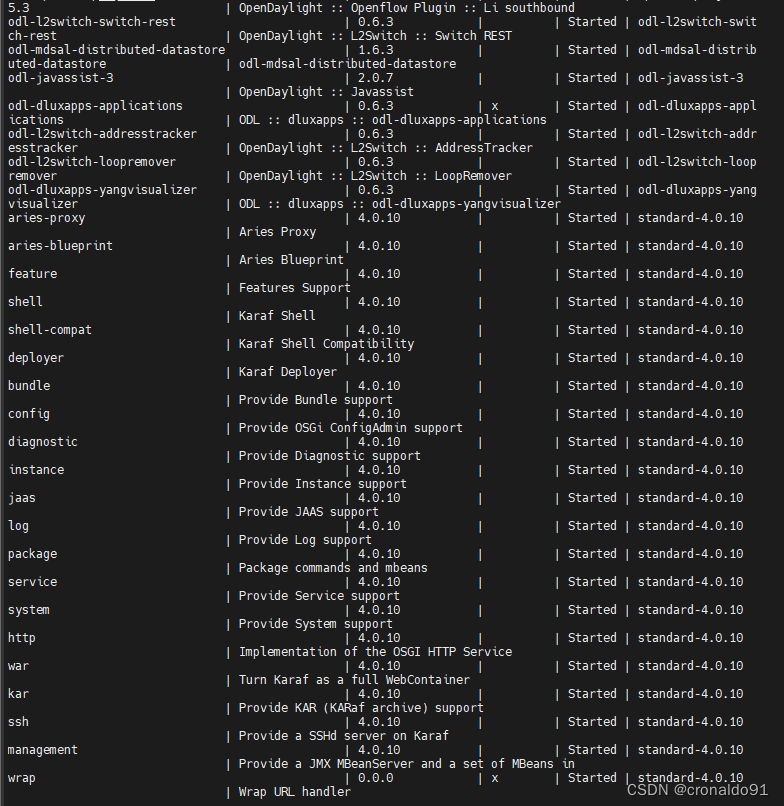
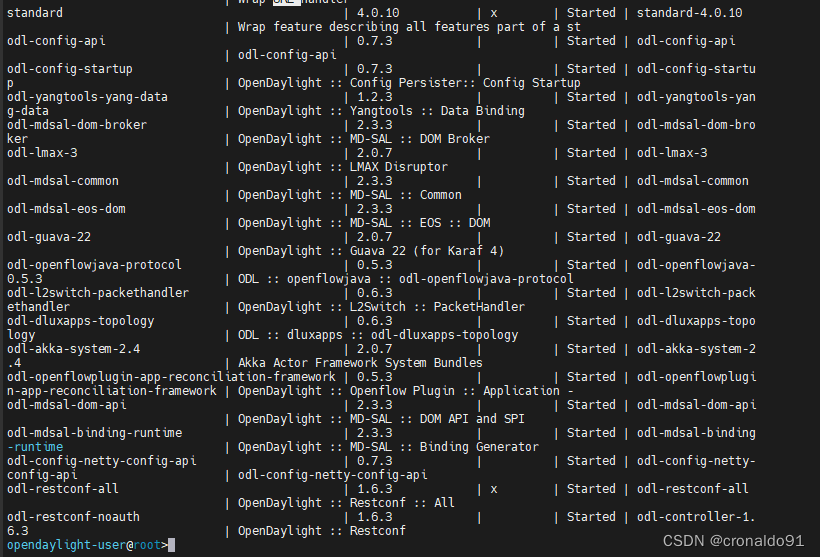
(2)查询
feature:list -i
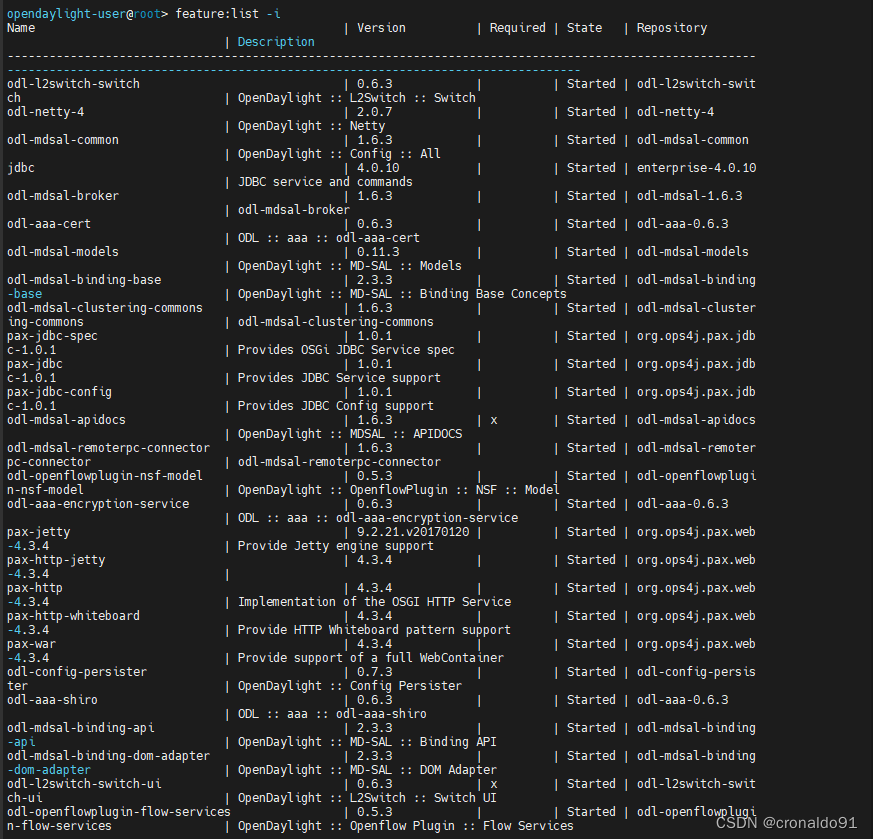
2.查看流表显示不全
(1)报错
添加2条流表后显示不全

(2)原因分析
ODL未开启。
(3)解决方法
开启ODL:
/root/karaf-0.7.3/bin/karaf

显示成功:

3.如何删除OVS流表
(1)删除
ovs_server01
ovs-ofctl del-flows ovs11 -O Openflow13 in_port=1,out_port=2
ovs-ofctl del-flows ovs11 -O Openflow13 in_port=2,out_port=1![]()
ovs_server02
ovs-ofctl del-flows ovs12 -O Openflow13 in_port=1,out_port=2
ovs-ofctl del-flows ovs12 -O Openflow13 in_port=2,out_port=1
相关文章:
云计算:Linux 部署 OVS 集群(控制端)实现OpenFlow
目录 一、实验 1.环境 2.Linux 部署 OVS 集群(控制端) 3.控制端对接服务端OVS网元 4.服务端OVS添加流表 5.服务端删除OVS 二、问题 1. ODL如何查找已安装插件 2.查看流表显示不全 3.如何删除OVS流表 一、实验 1.环境 (1) 主机 表1 宿主机 主…...

使用/api/put保存数据到OpenTSDB,报204错误
错误信息 HttpResponseProxy{HTTP/1.1 204 No Content [Content-Type: application/json; charsetUTF-8, Content-Length: 0]} 错误原因 在OpenTSDB中,使用/api/put保执行写入操作,得到204响应,表示已经成功写入数据库。...
)
Open3D kmeans聚类(马氏距离,Python版本)
文章目录 一、简介二、算法步骤三、代码实现四、实现效果参考资料一、简介 在诸多的聚类方法中,K-Means聚类方法是属于“基于原型的聚类”(也称为原型聚类)的方法,此类方法均是假设聚类结构能通过一组原型刻画,在现实聚类中极为常用。通常情况下,该类算法会先对原型进行初始…...

python抠图程序
import cv2 import numpy as np def color_threshold(image, lower, upper): hsv_image cv2.cvtColor(image, cv2.COLOR_BGR2HSV) mask cv2.inRange(hsv_image, lower, upper) result cv2.bitwise_and(image, image, maskmask) return result # 读取图片…...
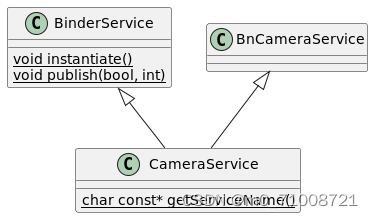
Android13 CameraServer启动流程
代码入口 frameworks/av/camera/cameraserver 里面包含了四个文件 我们先来看看Android.bp的内容 package {// See: http://go/android-license-faq// A large-scale-change added default_applicable_licenses to import// all of the license_kinds from "frameworks_a…...

如何升级node.js版本
升级Node.js可以通过多种方式来完成,以下是四种常见的方法: 方法一:使用Node.js官方安装程序 访问Node.js的官方网站,下载对应你操作系统的最新版本安装程序。通常,你可以 https://nodejs.org/en/download 找到你需…...
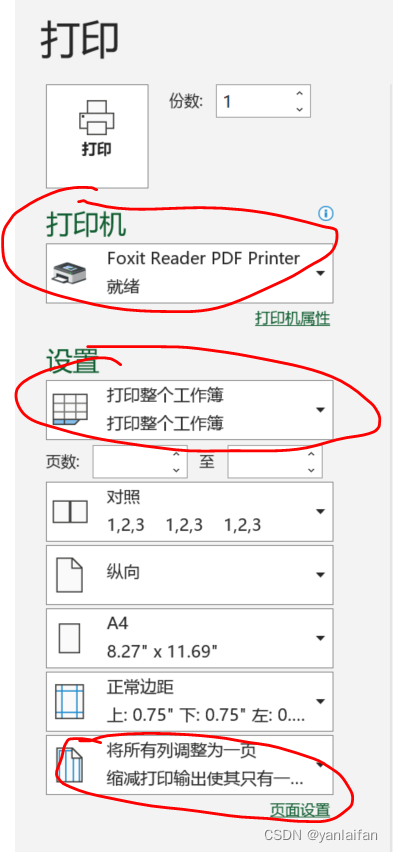
Excel---一个工作簿中的多个sheet合并成一个PDF
0 Preface/Foreword 1 操作方法 1.1 方法一 文件》 导出 》创建PDF/XPS 》 选项 》发布内容 》“整个工作簿” 1.2 方法二 文件》 打印》 打印机选项中,选择一种PDF阅读器 》设置选项中,选择打印整个工作簿。...
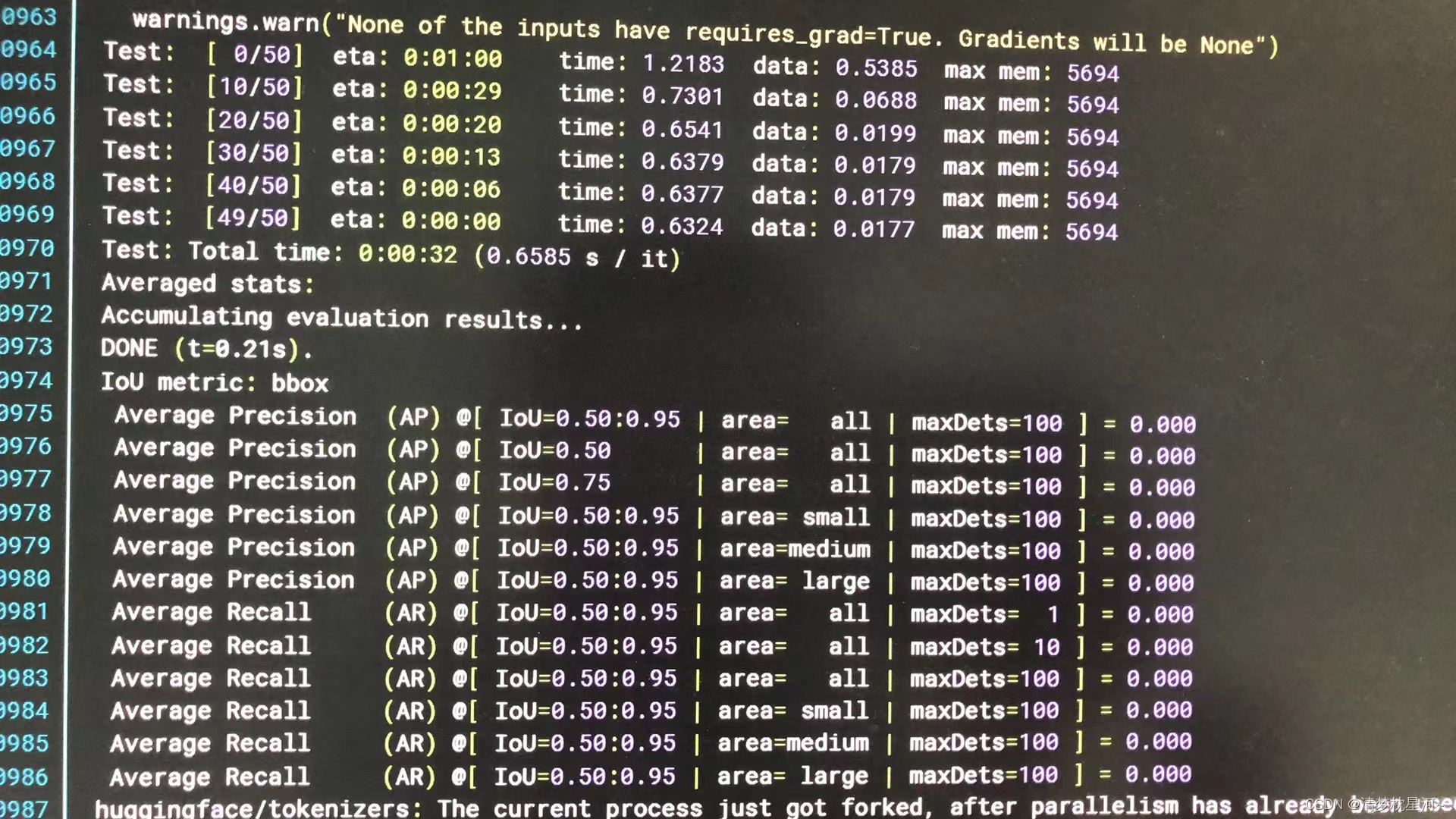
结合文本的目标检测:Open-GroundingDino训练自己的数据集
1、简单介绍 Open-GroundingDino是GroundingDino的第三方实现训练流程的代码,因为官方GroundingDino没有提供训练代码,只提供了demo推理代码。 关于GroundingDino的介绍可以看论文:https://arxiv.org/pdf/2303.05499.pdf GroundingDino的G…...
分布式锁-redission锁的MutiLock原理
5.5 分布式锁-redission锁的MutiLock原理 为了提高redis的可用性,我们会搭建集群或者主从,现在以主从为例 此时我们去写命令,写在主机上, 主机会将数据同步给从机,但是假设在主机还没有来得及把数据写入到从机去的时…...

MySQL索引、B+树相关知识汇总
MySQL索引、B树相关知识汇总 一、有一个查询需求,MySQL中有两个表,一个表1000W数据,另一个表只有几千数据,要做一个关联查询,如何优化?1、为关联字段建立索引二、小表驱动大表 二、b树和b树的区别1、更高的…...
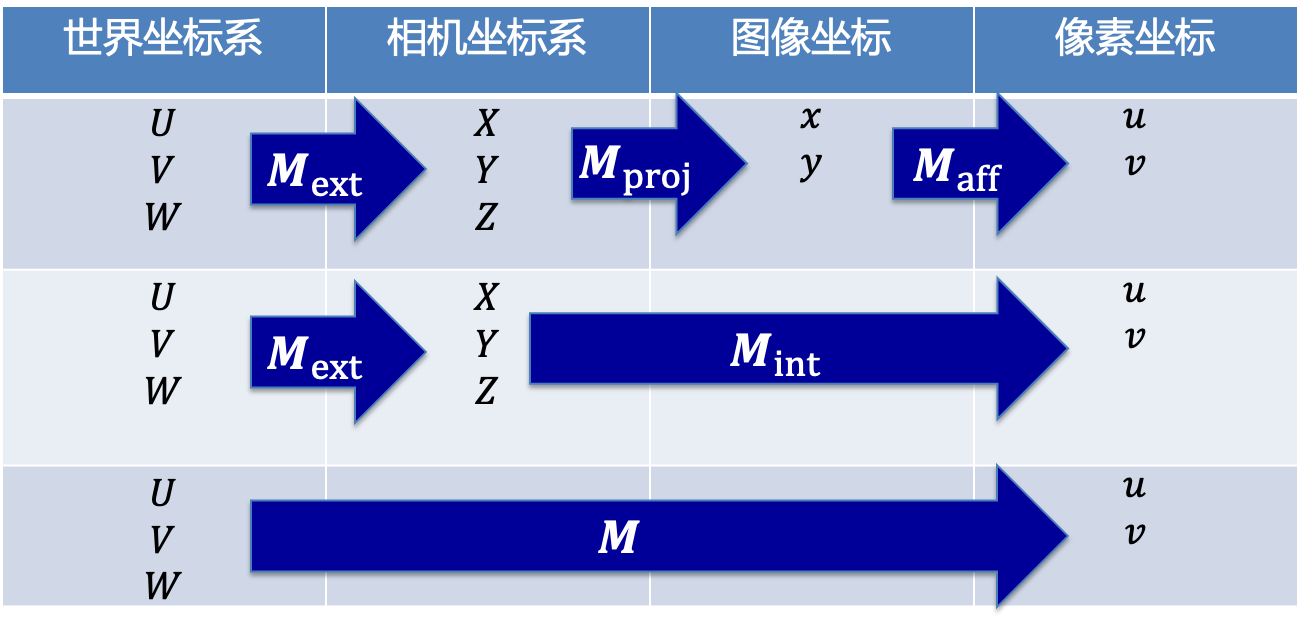
相机模型浅析
相机模型 文章目录 相机模型四个坐标系针孔相机模型世界坐标系到相机坐标系相机坐标系到图像坐标系图像坐标到像素坐标 四个坐标系 ①世界坐标系:是客观三维世界的绝对坐标系,也称客观坐标系。因为数码相机安放在三维空间中,我们需要世界坐标…...
国芯科技(C*Core)双芯片汽车安全气囊解决方案
汽车安全气囊是20世纪汽车上的十大发明之一,是目前汽车的法定标准配置,成为汽车驾乘人员生命安全的保护神。随着人们对汽车安全性要求的进一步提高,已形成前排驾驶员气囊、前排副驾驶员气囊、前排侧气囊、后排侧气囊、膝部气囊、安全气帘等等…...

牛客周赛 Round 39(A,B,C,D,E,F,G)
比赛链接 官方题解(视频) B题是个贪心。CD用同余最短路,预处理的完全背包,多重背包都能做,比较典型。E是个诈骗,暴力就完事了。F是个线段树。G是个分类大讨论,出题人钦定的本年度最佳最粪 题目…...

解锁区块链技术的潜力:实现智能合约与DApps
在数字时代,区块链技术正迅速成为重塑多个行业的革命性力量。从金融服务到供应链管理,再到数字身份验证,区块链提供了一种去中心化、安全和透明的数据处理方式。在本文中,我们将深入探讨区块链技术,特别是智能合约和去…...

MAC OS关闭SIP(navicat 无法保存密码)
最近安装navicat(16.3.7)时,安装后无法保存密码,保存密码会报错如下: 因为用的破解版,一开始是打不开的,用自带的修复软件修复后就可以打开了,但是保存密码就会报错,按照网上的一些操作 1、卸载…...

阿里云服务器带宽价格全解析,附报价单
阿里云服务器公网带宽怎么收费?北京地域服务器按固定带宽计费一个月23元/M,按使用流量计费0.8元/GB,云服务器地域不同实际带宽价格也不同,阿里云服务器网aliyunfuwuqi.com分享不同带宽计费模式下带宽收费价格表: 公网…...
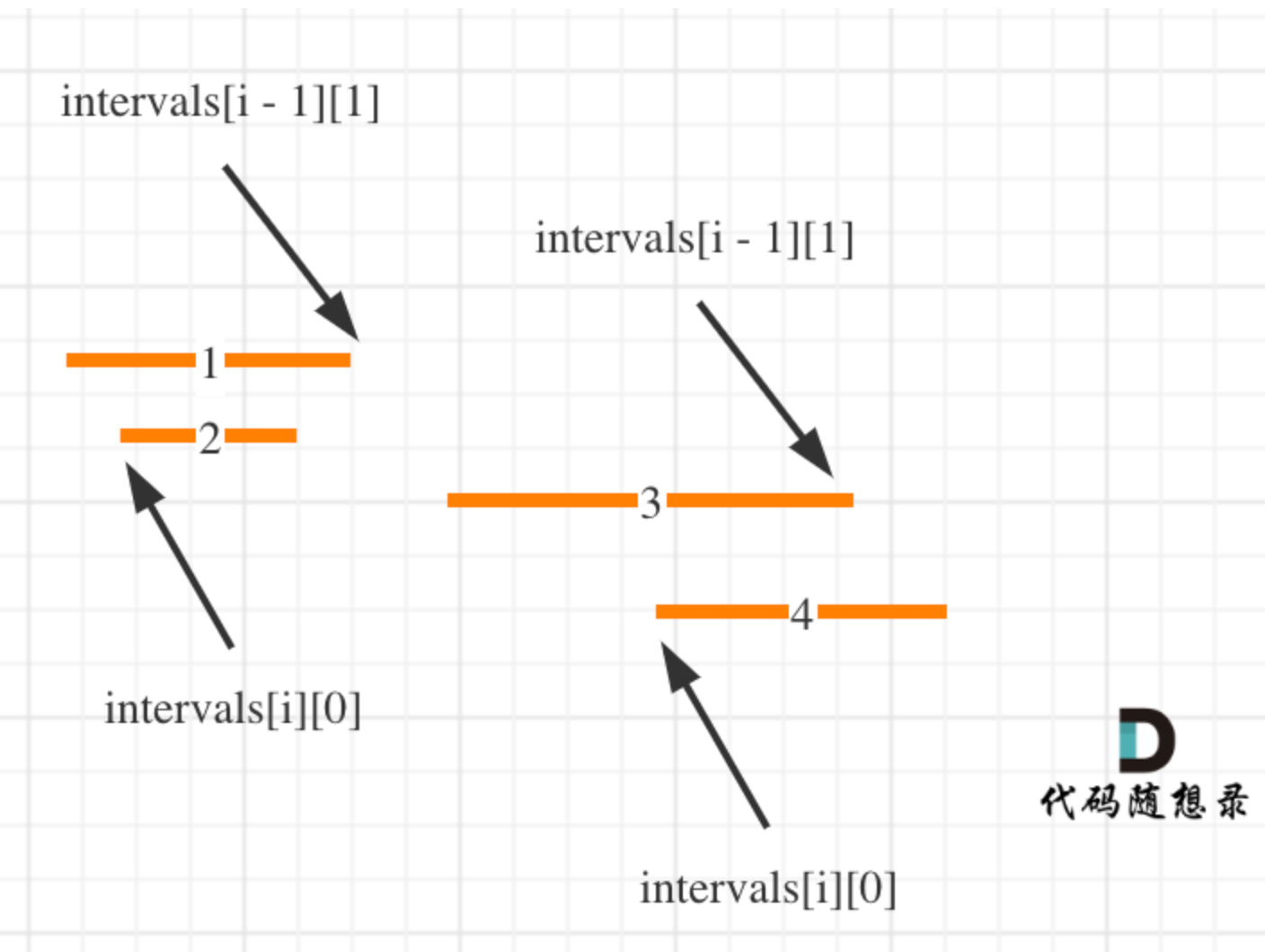
Day36|贪心算法part05:435. 无重叠区间、763.划分字母区间、56. 合并区间
435. 无重叠区间 有了上题射气球的因子,这题也就有思路了,反正无脑排序就行了: 首先将所有区间按照end的大小从小到大排序;选取最早end为起始x_end遍历所有区间,如果该区间的start比end大(可重叠…...

棋牌室计时吧台计费收费灯控管理系统软件操作流程
棋牌室计时吧台计费收费灯控管理系统软件操作流程 一、前言 以下软件操作教程以,佳易王棋牌桌球计时计费管理系统软件灯控版V17.87为例说明 软件文件下载可以点击最下方官网卡片——软件下载——试用版软件下载 该计时计费软件可以是棋牌和桌球混合同时计时计费 …...

【实践篇】RabbitMQ实现队列延迟功能汇总
前言 记录下RabbitMQ实现延迟队列功能的所有实践内容。 前期准备,需要安装好docker、docker-compose的运行环境。 一、安装RabbitMQ 开启RabbitMQ的WEB管理功能。-CSDN博客 二、实现延迟队列的两种方式 RabbitMQ实现延迟队列的两种方式。-CSDN博客 三、实践文…...

EditPlus来啦(免费使用!)
hello,我是小索奇 今天推荐一款编辑器,是索奇学习JavaSE时入手滴,非常好用哈,小索奇还是通过老杜-杜老师入手滴,相信很多人也是通过老杜认识嘞,来寻找破解版或者准备入手这个间接使用的编辑器~ EditPlus是…...

ARM链接器命令行选项优化与实战技巧
1. ARM链接器命令行选项深度解析 在嵌入式开发领域,ARM链接器(armlink)作为工具链的关键组件,承担着将多个目标文件合并为可执行程序的重任。不同于简单的文件拼接,现代链接器提供了数十种精细控制选项,能够深度优化代码布局、调试…...

基于OpenClaw协议的轻量级AI代理网关MiniClaw实战指南
1. 项目概述:一个轻量级的AI代理网关如果你正在开发一个基于OpenClaw协议的AI应用客户端,或者想快速搭建一个能与现有OpenClaw生态工具(比如各种仪表盘、集成插件)兼容的独立AI代理服务,那么你很可能需要一个能完整实现…...

别再手动下载了!用Chocolatey在Windows上一键安装Zookeeper 3.8.0
告别繁琐配置:用Chocolatey在Windows上极速部署Zookeeper 每次在Windows环境下部署Zookeeper,你是否还在重复下载压缩包、配置环境变量、修改配置文件的传统流程?对于追求效率的开发者而言,这种手动操作不仅耗时耗力,还…...

SQL Chat:用自然语言对话操作数据库的实战指南
1. 项目概述:当自然语言遇见数据库 作为一名和数据打了十几年交道的开发者,我深知与数据库交互的痛点。无论是写复杂的多表关联查询,还是排查一个数据异常,传统的SQL客户端工具(比如Navicat、DBeaver)虽然…...

ARM PMCCNTR寄存器:性能监控与时钟周期计数详解
1. ARM PMCCNTR寄存器深度解析在现代处理器架构中,性能监控单元(PMU)是系统调优和性能分析的关键组件。作为ARM架构性能监控的核心,PMCCNTR寄存器提供了精确的处理器时钟周期计数能力。这个64位寄存器在AArch32和AArch64执行模式下具有架构映射关系&…...

【算法四十五】139. 单词拆分
139. 单词拆分 动态规划: class Solution {public boolean wordBreak(String s, List<String> wordDict) {//子问题:字符串的前 i 个字符能否用字典里的单词拼接//状态转移方程:dp[i] true if ∃ j ∈ [0, i) , dp[j] true && s[j..i-1] ∈ word…...

分数阶傅里叶变换在声纳阵列分析中的应用与优化
1. 分数阶傅里叶变换在声纳阵列分析中的核心价值在水下声学工程领域,准确计算声纳阵列的辐射模式一直是个技术难点。传统FFT算法虽然计算效率高,但在处理特定方位角的辐射特性时存在明显的精度局限。2005年日本防卫厅技术研究本所的这项研究,…...

自动驾驶人机交接:DMS与安全验证如何破解控制权转移困局
1. 自动驾驶人机交接的核心困境与行业分野最近几年,自动驾驶(AV)和高级驾驶辅助系统(ADAS)无疑是汽车科技领域最炙手可热的话题。无论是传统车企的“新四化”转型,还是科技公司的颠覆性入局,大家…...

文献阅读 260511-Wildfire damages and the cost-effective role of forest fuel treatments
Wildfire damages and the cost-effective role of forest fuel treatments 来自 <https://www.science.org/doi/10.1126/science.aea6463> ## Abstract: Gave the core question: Wildfires are among the most pressing environmental challenges of the 21st century,…...

告别编译噩梦:在Ubuntu 22.04上为你的C++项目搞定Abseil依赖的三种方法
告别编译噩梦:在Ubuntu 22.04上为你的C项目搞定Abseil依赖的三种方法 在C项目的开发过程中,依赖管理一直是开发者面临的一大挑战。特别是对于现代C项目而言,如何高效、可靠地引入和管理第三方库,往往决定了项目的开发效率和最终质…...