SocketCan 应用编程
SocketCan 应用编程
由于 Linux 系统将 CAN 设备作为网络设备进行管理,因此在 CAN 总线应用开发方面,Linux 提供了SocketCAN 应用编程接口,使得 CAN 总线通信近似于和以太网的通信,应用程序开发接口更加通用,也更加灵活。
SocketCAN 中大部分的数据结构和函数在头文件 linux/can.h 中进行了定义,所以,在我们的应用程序中一定要包含<linux/can.h>头文件。
创建 socket 套接字
CAN 总线套接字的创建采用标准的网络套接字操作来完成,网络套接字在头文件<sys/socket.h>中定义。
创建 CAN 套接字的方法如下:
int sockfd = -1; /* 创建套接字 */
sockfd = socket(PF_CAN, SOCK_RAW, CAN_RAW); if(0 > sockfd) { perror("socket error"); exit(EXIT_FAILURE); }
socket 函数在 30.2.1 小节中给大家详细介绍过,第一个参数用于指定通信域,在Socket Can中,通常将其设置为PF_CAN,指定为CAN通信协议;第二个参数用于指定套接字的类型,通常将其设置为SOCK_RAW;第三个参数通常设置为 CAN_RAW。
将套接字与 CAN 设备进行绑定
譬如,将创建的套接字与 can0 进行绑定,示例代码如下所示:
truct ifreq ifr = {0}; struct sockaddr_can can_addr = {0}; int ret; strcpy(ifr.ifr_name, "can0"); //指定名字 ioctl(sockfd, SIOCGIFINDEX, &ifr); can_addr.can_family = AF_CAN; //填充数据 can_addr.can_ifindex = ifr.ifr_ifindex; /* 将套接字与 can0 进行绑定 */
ret = bind(sockfd, (struct sockaddr *)&can_addr, sizeof(can_addr)); if (0 > ret) { perror("bind error"); close(sockfd); exit(EXIT_FAILURE);
}
bind()函数在 30.2.2 小节中给大家详细介绍过,这里不再重述!
这里出现了两个结构体:struct ifreq 和 struct sockaddr_can,其中 struct ifreq 定义在<net/if.h>头文件中,而 struct sockaddr_can 定义在<linux/can.h>头文件中,这些结构体就不给大家解释了,有兴趣的自己去查,笔者也不太懂!
设置过滤规则
在我们的应用程序中,如果没有设置过滤规则,应用程序默认会接收所有 ID 的报文;如果我们的应用程序只需要接收某些特定 ID 的报文(亦或者不接受所有报文,只发送报文),则可以通过 setsockopt 函数设置过滤规则,譬如某应用程序只接收 ID 为 0x60A 和 0x60B 的报文帧,则可将其它不符合规则的帧全部给过滤掉,示例代码如下所示:
struct can_filter rfilter[2]; //定义一个 can_filter 结构体对象 // 填充过滤规则,只接收 ID 为(can_id & can_mask)的报文 rfilter[0].can_id = 0x60A;
rfilter[0].can_mask = 0x7FF;
rfilter[1].can_id = 0x60B;
rfilter[1].can_mask = 0x7FF; // 调用 setsockopt 设置过滤规则 setsockopt(sockfd, SOL_CAN_RAW, CAN_RAW_FILTER, &rfilter, sizeof(rfilter));
struct can_filter 结构体中只有两个成员,can_id 和 can_mask。
如果应用程序不接收所有报文,在这种仅仅发送数据的应用中,可以在内核中省略接收队列,以此减少CPU 资源的消耗。此时可将 setsockopt()函数的第 4 个参数设置为 NULL,将第 5 个参数设置为 0,如下所示:
setsockopt(sockfd, SOL_CAN_RAW, CAN_RAW_FILTER, NULL, 0);
数据发送/接收
在数据收发的内容方面,CAN 总线与标准套接字通信稍有不同,每一次通信都采用 struct can_frame 结构体将数据封装成帧。结构体定义如下:
示例代码 31.2.1 struct can_frame 结构体
struct can_frame { canid_t can_id; /* CAN 标识符 */ __u8 can_dlc; /* 数据长度(最长为 8 个字节) */ __u8 __pad; /* padding */ __u8 __res0; /* reserved / padding */ __u8 __res1; /* reserved / padding */ __u8 data[8]; /* 数据 */ };
can_id 为帧的标识符,如果是标准帧,就使用 can_id 的低 11 位;如果为扩展帧,就使用 0~28 位。can_id 的第 29、30、31 位是帧的标志位,用来定义帧的类型,定义如下:
/* special address description flags for the CAN_ID */ #define CAN_EFF_FLAG 0x80000000U /* 扩展帧的标识 */
#define CAN_RTR_FLAG 0x40000000U /* 远程帧的标识 */
#define CAN_ERR_FLAG 0x20000000U /* 错误帧的标识,用于错误检查 */ /* mask */ #define CAN_SFF_MASK 0x000007FFU /* <can_id & CAN_SFF_MASK>获取标准帧 ID */
#define CAN_EFF_MASK 0x1FFFFFFFU /* <can_id & CAN_EFF_MASK>获取标准帧 ID */
#define CAN_ERR_MASK 0x1FFFFFFFU /* omit EFF, RTR, ERR flags */
(1)、数据发送
对于数据发送,使用 write()函数来实现,譬如要发送的数据帧包含了三个字节数据 0xA0、0xB0 以及0xC0,帧 ID 为 123,可采用如下方法进行发送:
struct can_frame frame; //定义一个 can_frame 变量 int ret; frame.can_id = 123;//如果为扩展帧,那么 frame.can_id = CAN_EFF_FLAG | 123;
frame.can_dlc = 3; //数据长度为 3
frame.data[0] = 0xA0; //数据内容为 0xA0
frame.data[1] = 0xB0; //数据内容为 0xB0
frame.data[2] = 0xC0; //数据内容为 0xC0 ret = write(sockfd, &frame, sizeof(frame)); //发送数据 if(sizeof(frame) != ret) //如果 ret 不等于帧长度,就说明发送失败 perror("write error");
如果要发送远程帧(帧 ID 为 123),可采用如下方法进行发送:
struct can_frame frame; frame.can_id = CAN_RTR_FLAG | 123; write(sockfd, &frame, sizeof(frame));
(2)、数据接收
数据接收使用 read()函数来实现,如下所示:
struct can_frame frame; int ret = read(sockfd, &frame, sizeof(frame));
(3)、错误处理
当应用程序接收到一帧数据之后,可以通过判断 can_id 中的 CAN_ERR_FLAG 位来判断接收的帧是否为错误帧。如果为错误帧,可以通过 can_id 的其他符号位来判断错误的具体原因。错误帧的符号位在头文件<linux/can/error.h>中定义。
/* error class (mask) in can_id */ #define CAN_ERR_TX_TIMEOUT 0x00000001U /* TX timeout (by netdevice driver) */
#define CAN_ERR_LOSTARB 0x00000002U /* lost arbitration / data[0] */
#define CAN_ERR_CRTL 0x00000004U /* controller problems / data[1] */
#define CAN_ERR_PROT 0x00000008U /* protocol violations / data[2..3] */
#define CAN_ERR_TRX 0x00000010U /* transceiver status / data[4] */
#define CAN_ERR_ACK 0x00000020U /* received no ACK on transmission */
#define CAN_ERR_BUSOFF 0x00000040U /* bus off */
#define CAN_ERR_BUSERROR 0x00000080U /* bus error (may flood!) */
#define CAN_ERR_RESTARTED 0x00000100U /* controller restarted */
回环功能设置
在默认情况下,CAN 的本地回环功能是开启的,可以使用下面的方法关闭或开启本地回环功能:
int loopback = 0; //0 表示关闭,1 表示开启(默认) setsockopt(sockfd, SOL_CAN_RAW, CAN_RAW_LOOPBACK, &loopback, sizeof(loopback));
在本地回环功能开启的情况下,所有的发送帧都会被回环到与 CAN 总线接口对应的套接字上。
相关文章:

SocketCan 应用编程
SocketCan 应用编程 由于 Linux 系统将 CAN 设备作为网络设备进行管理,因此在 CAN 总线应用开发方面,Linux 提供了SocketCAN 应用编程接口,使得 CAN 总线通信近似于和以太网的通信,应用程序开发接口更加通用,也更加灵…...

从零学习python - 04函数方法与返回值
函数:Function-也称为方法,是组织好的、可重复使用的,用来实现指定功能的代码块。函数的定义与调用:创建函数目的是封装业务逻辑,实现代码复用# 创建函数关键字:def(definition)def fun1(x, y):print(x y)函数的参数:python函数中…...
MySQL实战之事务到底是隔离的还是不隔离的
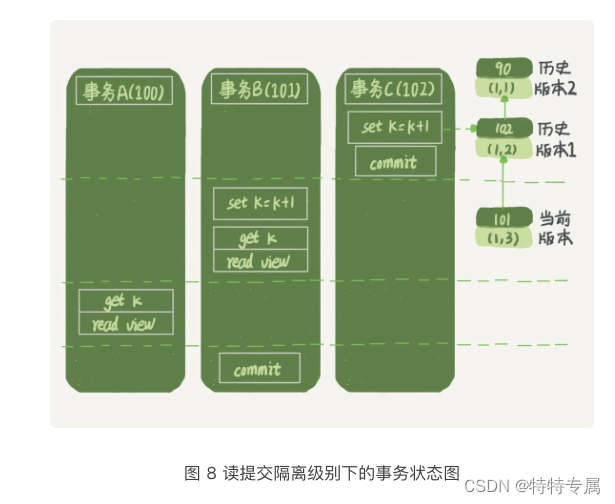
1.前言 我们在MySQL实战之事务隔离:为什么你改了我还看不见讲过事务隔离级别的时候提到过,如果是可重复读隔离级别,事务T启动的时候会创建一个视图read-view,之后事务T执行期间,即使有其他事务修改了数据,事务T看到的…...
Elasticsearch:理解 Master,Elections,Quorum 及 脑裂
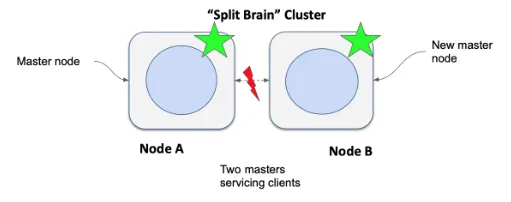
集群中的每个节点都可以分配多个角色:master、data、ingest、ml(机器学习)等。 我们在当前讨论中感兴趣的角色之一是 master 角色。 在 Elasticsearch 的配置中,我们可以配置一个节点为 master 节点。master 角色的分配表明该节点…...
【致敬女神】HTMLReport应用之Unittest+Python+Selenium+HTMLReport项目自动化测试实战
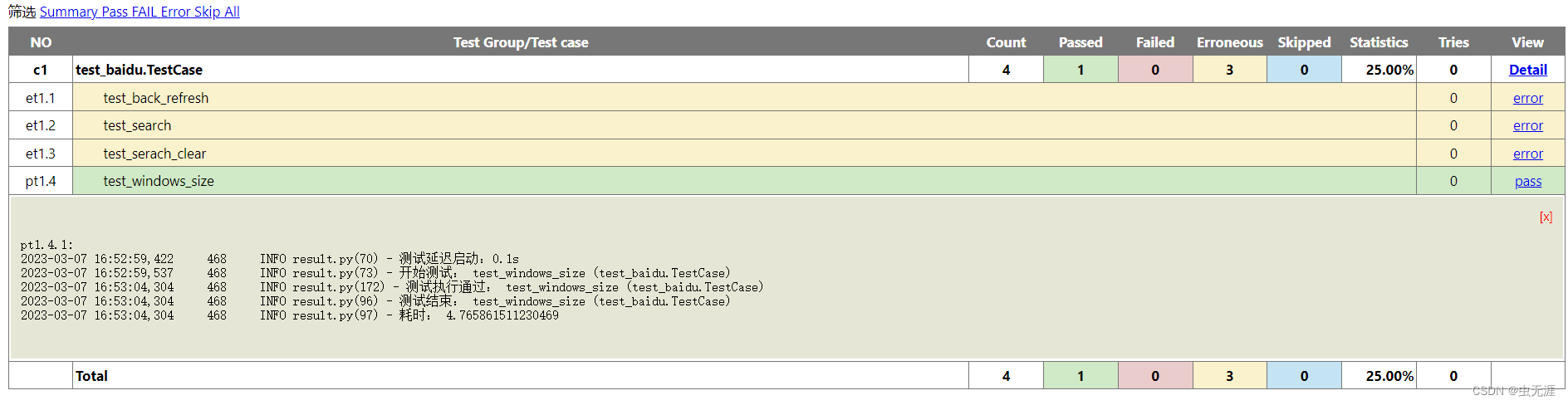
HTMLReport应用之UnittestPythonSeleniumHTMLReport项目自动化测试实战1 测试框架结构2 技术栈3 实现思路3.1 使用HtmlTestRunner3.2 使用HTMLReport4 TestRunner参数说明4.1 源码4.2 参数说明5 框架代码5.1 common/reportOut.py5.2 common/sendMain.py5.3 report5.3.1 xxx.htm…...
JAVA的16 个实用代码优化小技巧
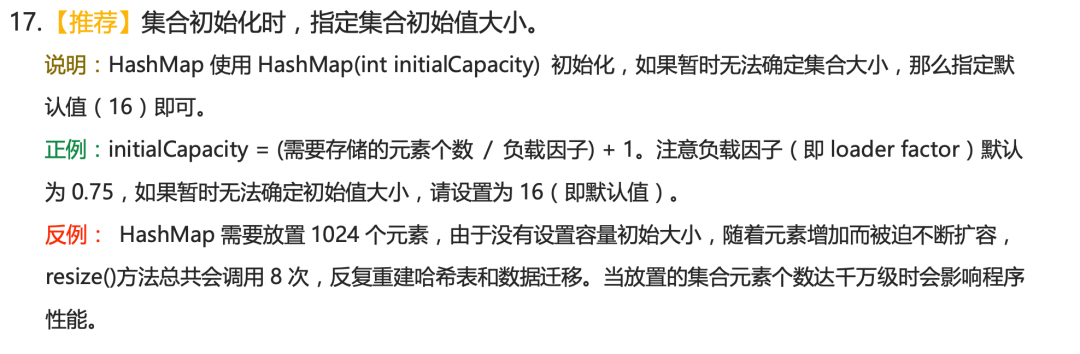
一、类成员与方法的可见性最小化 举例:如果是一个private的方法,想删除就删除。 如果一个public的service方法,或者一个public的成员变量,删除一下,不得思考很多。 二、使用位移操作替代乘除法 计算机是使用二进制…...

并发编程的三大挑战之原子性及其解决方案
目录 一、原子性问题 1、带来原子性问题的原因 2、如何解决线程切换带来的原子问题 2.1、使用synchronized关键字来保证 2.2、使用CAS来保证原子性 2.3、使用lock锁来保证 一、原子性问题 1、带来原子性问题的原因 线程切换是带来原子的根本原因,java的并发程…...
)
QML动画(其他的动画)
PauseAnimation (暂停动画) 为动画提供暂停 Rectangle{id:rect1width: 100;height: 100;x:100;y:100color: "lightBlue"SequentialAnimation{running: trueColorAnimation {target: rect1;property: "color";…...
Spark 配置项
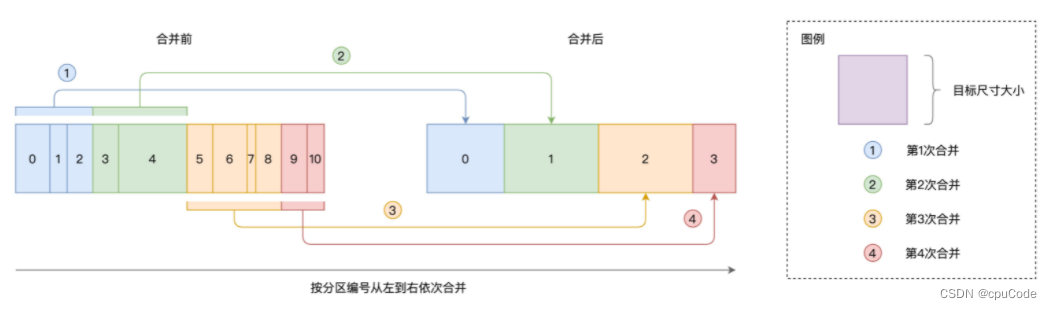
Spark 配置项硬件资源类CPU内存堆外内User Memory/Spark 可用内存Execution/Storage Memory磁盘ShuffleSpark SQLJoin 策略调整自动分区合并自动倾斜处理配置项分为 3 类: 硬件资源类 : 与 CPU、内存、磁盘有关的配置项Shuffle 类 : Shuffle 计算过程的配置项Spark SQL : Spar…...

掌握Vue3模板语法,助你轻松实现高效Web开发
Vue3作为前端开发中的一种主流框架,为我们提供了多种灵活的方式来处理模板语法。除了基础的模板语法,Vue3还提供了一些高级的语法,可以让我们更好地处理组件、响应式数据和UI逻辑等。在这篇博客中,我们将介绍Vue3中的一些高级模板…...
Jmeter+Ant+Jenkins接口自动化测试平台搭建
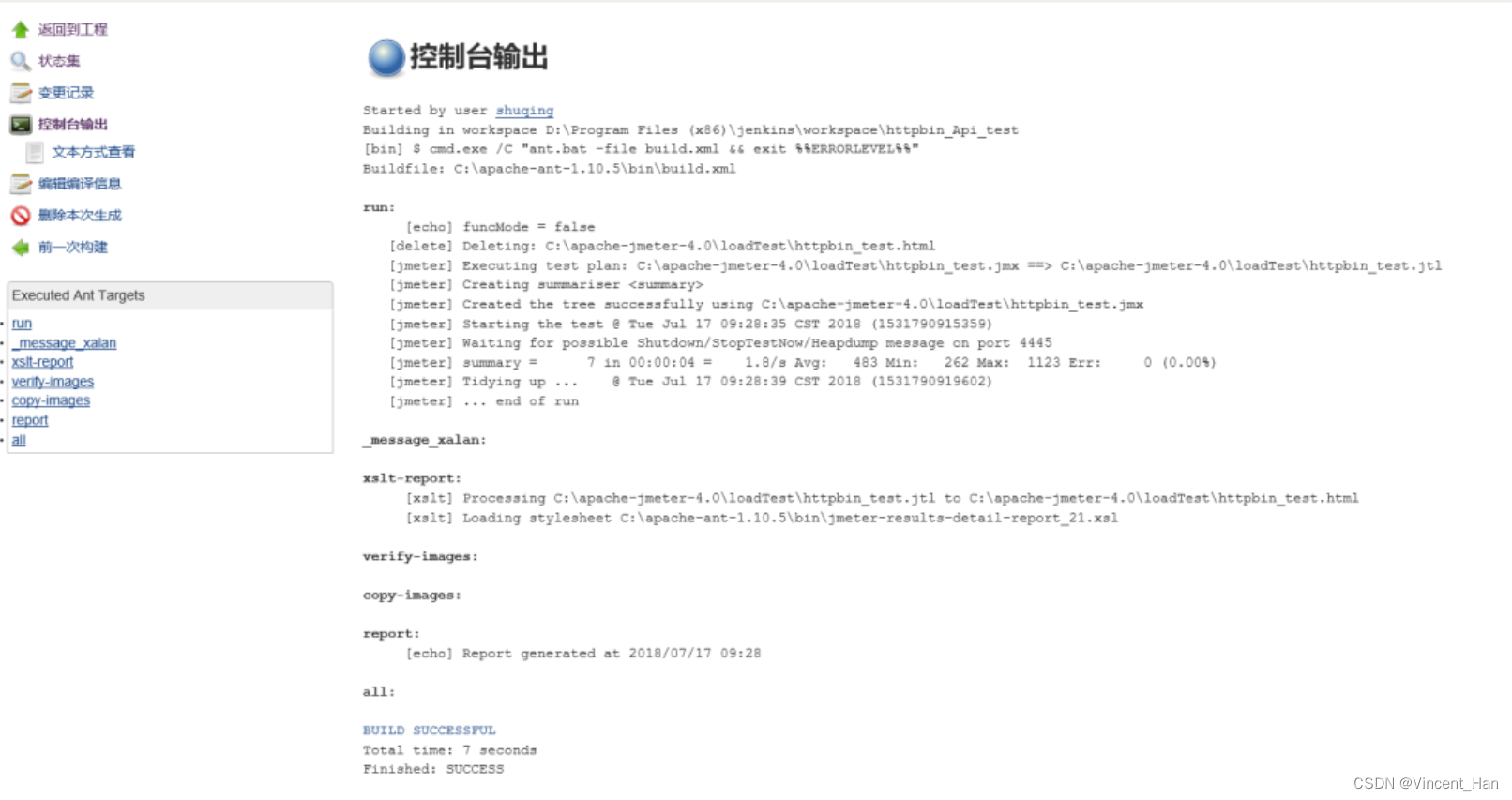
平台简介一个完整的接口自动化测试平台需要支持接口的自动执行,自动生成测试报告,以及持续集成。Jmeter支持接口的测试,Ant支持自动构建,而Jenkins支持持续集成,所以三者组合在一起可以构成一个功能完善的接口自动化测…...
)
ncnn部署(CMakelists.txt)
1. NCNN 环境安装 参考博客: 基于ncnn的yolov5模型部署 1. 1 protobuf编译 打开VS2013/VS2019的X64命令行(注意不是cmd),我这里以V32013环境进行编译 > cd <protobuf-root-dir> > mkdir build-vs2013 > cd build-vs2013 > cmake -G"NMake Makefil…...
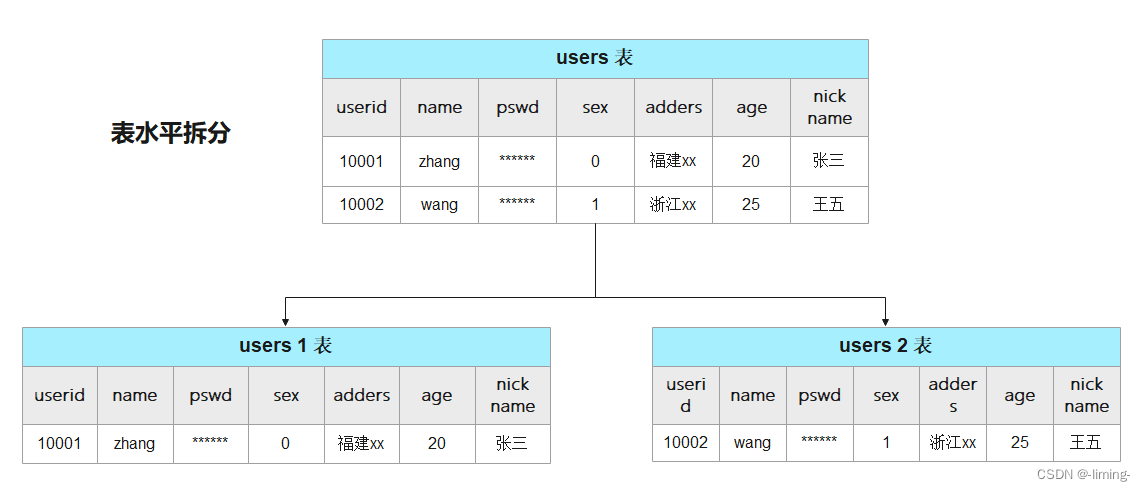
SQL分库分表
什么是分库分表? 分库分表是两种操作,一种是分库,一种是分表。 分库分表又分为垂直拆分和水平拆分两种。 (1)分库:将原来存放在单个数据库中的数据,拆分到多个数据库中存放。 (2&…...

大数据分析案例-基于逻辑回归算法构建微博评论情感分类模型
🤵♂️ 个人主页:@艾派森的个人主页 ✍🏻作者简介:Python学习者 🐋 希望大家多多支持,我们一起进步!😄 如果文章对你有帮助的话, 欢迎评论 💬点赞👍🏻 收藏 📂加关注+ 喜欢大数据分析项目的小伙伴,希望可以多多支持该系列的其他文章 大数据分析案例合集…...
)
0105深度优先搜索算法非递归2种实现对比-无向图-数据结构和算法(Java)
1 两种非递归实现 在前面我们解决无向图的单点通性和单点路径问题时,都用到了深度优先搜索算法。深度优先搜索算法可以用递归和非递归两种方式。这里讨论非递归实现。 无向图结构使用邻接表实现。 第一种非递归方法(推荐),代码如…...

传统手工数据采集耗时耗力?Smartbi数据填报实现数据收集分析自动化
企业在日常经营管理过程中,往往需要收集很多内外部的信息,清洗整理后再进行存储、分析、呈现、决策支持等各种作业,如何高效收集结构化数据是企业管理者经常要面对的问题。传统手工的数据采集方式不仅耗费了大量人力时间成本,还容…...

《Spring源码深度分析》第5章 Bean的加载
目录标题前言一、Bean加载入口与源码分析1、Bean加载的入口2、Bean加载源码二、FactoryBean的使用三、缓存中获取单例bean(待补充)前言 经过前面的分析,我们终于结束了对XML 配置文件的解析,接下来将会面临更大的挑战,就是对 bean 加载的探索…...
)
华为OD机试真题Java实现【求最大数字】真题+解题思路+代码(20222023)
求最大数字 题目 给定一个由纯数字组成以字符串表示的数值,现要求字符串中的每个数字最多只能出现2次,超过的需要进行删除;删除某个重复的数字后,其它数字相对位置保持不变。 如34533,数字3重复超过2次,需要删除其中一个3,删除第一个3后获得最大数值4533 请返回经过删…...
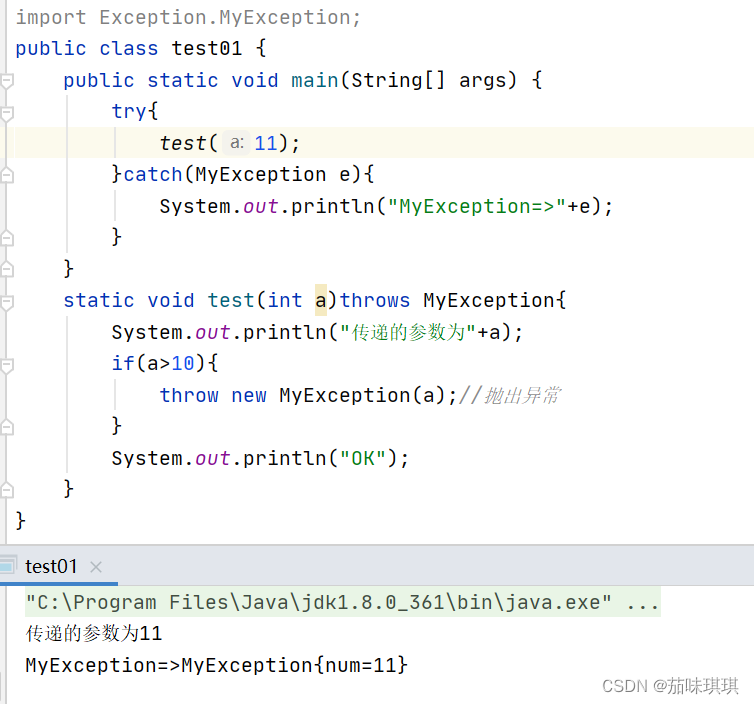
Java——异常机制
前言 随着对java的不断深入学习,在对语法以及编程思想有了一定的了解之后,在编程的过程中有可能会因为用户的输入不正确或者逻辑错误而出现异常或者错误,因此如何去捕捉与避免不应该出现的异常或者错误就变得十分重要。本文就介绍了java的异…...
【大数据实时数据同步】超级详细的生产环境OGG(GoldenGate)12.2实时异构同步Oracle数据部署方案(下)
系列文章目录 【大数据实时数据同步】超级详细的生产环境OGG(GoldenGate)12.2实时异构同步Oracle数据部署方案(上) 【大数据实时数据同步】超级详细的生产环境OGG(GoldenGate)12.2实时异构同步Oracle数据部署方案(中) 【大数据实时数据同步】超级详细的生产环境OGG(GoldenGate…...

5月12日直播 | CANN Bench:为昇腾算子评测立起一把统一的尺子
CANN Bench:为昇腾算子评测立起一把统一的尺子 当 Coding Agent 一次写出几十个算子已成为常态,"什么算优质算子"变成了一个单一维度无法评估准确的问题:能不能过编译只是入场券,精度是否经得起验证、换个 shape 换个 d…...

【Oracle数据库指南】第06篇:Oracle DML语句与事务控制——数据操作与ACID特性深度解析
上一篇【第05篇】Oracle子查询与集合操作——嵌套查询与结果合并全解析 下一篇【第07篇】SQL*Plus基础——登录、环境设置与缓冲区操作 摘要 本文全面讲解Oracle DML(数据操作语言)语句,包括INSERT、UPDATE、DELETE和MERGE的详细用法&#x…...
)
C# 实时查看硬件使用率(CPU 内存 硬盘 网络)
一、整体架构 ┌─────────────────────────────────────────────────────────────┐ │ 硬件资源监控系统 │ ├────────────────────────…...

Windows下Python包管理权限踩坑实录:从WinError 5到WinError 32的完整解决流程
Windows下Python包管理权限问题深度解析:从WinError 5到WinError 32的实战指南 作为一名长期在Windows平台进行Python开发的工程师,我深刻理解文件权限问题带来的困扰。特别是当你在紧急项目交付前夜,突然遭遇PermissionError: [WinError 5]或…...

智能家居安全新突破:视觉AI如何实现从感知到认知的跨越
1. 项目概述:当视觉智能成为家庭安全的“火眼金睛”最近几年,智能家居的概念越来越火,从智能门锁到语音助手,似乎家里的一切都在变得“聪明”。但说实话,很多所谓的“智能”安全方案,比如单纯依靠门窗传感器…...

新手也能看懂的CrackMe逆向实战:从查壳到用OD改跳转,一步步带你破解
新手也能看懂的CrackMe逆向实战:从查壳到用OD改跳转,一步步带你破解 逆向工程就像拆解一个神秘的黑匣子,而CrackMe则是专门为练习破解设计的"玩具程序"。记得我第一次接触CrackMe时,面对满屏的汇编代码完全不知所措。本…...

终极SQLC资源管理指南:轻松优化内存、CPU和磁盘使用的7个实用策略
终极SQLC资源管理指南:轻松优化内存、CPU和磁盘使用的7个实用策略 【免费下载链接】sqlc Generate type-safe code from SQL 项目地址: https://gitcode.com/gh_mirrors/sq/sqlc sqlc是一个强大的工具,能够从SQL生成类型安全的代码,帮…...

Hermes Agent 可视化监控与文档生成工具 hermes-dashboard 详解
1. 项目概述与核心价值如果你正在使用 Hermes Agent 进行 AI 智能体开发,或者对 Agent 的内部运行状态感到好奇,那么你很可能需要一个“上帝视角”。hermes-dashboard正是这样一个工具,它为你提供了一个实时的监控仪表盘和一个自动生成的、可…...

【C++ 多态】虚函数 · 虚表 · 重写,一篇彻底弄明白!
C 多态详解 C多态是面向对象的核心灵魂,本文将由浅入深,带你循序渐进地掌握多态的方方面面,全程干货,坐稳发车~ ദ്ദി˶ー̀֊ー́ )✧ 文章目录C 多态详解1. 什么是多态?2. 运行时多态的实现前…...

PortProxyGUI:Windows端口转发图形化管理终极指南
PortProxyGUI:Windows端口转发图形化管理终极指南 【免费下载链接】PortProxyGUI A manager of netsh interface portproxy which is to evaluate TCP/IP port redirect on windows. 项目地址: https://gitcode.com/gh_mirrors/po/PortProxyGUI 在Windows网络…...