Gateway 基本配置指南:构建高效的网络接入网关
简介:
Gateway 是一个常用的网络接入网关,它可以帮助组织实现安全、可靠和高性能的网络连接。本文将介绍 Gateway 的基本配置,帮助读者了解如何正确配置和部署一个高效的 Gateway 网关。
1.网络拓扑规划:
在配置 Gateway 前,首先需要进行网络拓扑规划。确定 Gateway 的位置和角色,以及与其他网络设备的连接方式。Gateway 可以作为边界设备,连接内部网络和外部网络,也可以作为内部网关,连接不同的内部子网。合理的网络拓扑规划将有助于提高网络的可用性和性能。
2.IP 地址和子网配置:
为 Gateway 分配合适的 IP 地址和子网是配置过程中的重要一步。确保 Gateway 的 IP 地址与网络环境兼容,并避免与其他设备发生 IP 地址冲突。此外,正确配置子网掩码、网关地址和 DNS 服务器地址也是必要的,以便 Gateway 可以正确路由和解析网络请求。
3.安全配置:
保障网络安全是 Gateway 配置的关键方面之一。在配置过程中,需要设置访问控制策略,限制对 Gateway 的访问,并防止未经授权的访问。配置防火墙规则,过滤和监控网络流量,以提高网络的安全性。另外,还可以考虑使用 VPN 或 SSL 加密来保护网络通信的安全性。
4.路由配置:
Gateway 的路由配置决定了数据包在网络中的传输路径。根据网络拓扑和需求,配置合适的静态路由或动态路由协议,确保数据包能够正确地转发到目标地址。同时,还可以进行路由策略的配置,实现流量负载均衡和故障切换,提高网络的可靠性和性能。
5.服务代理配置:
Gateway 还可以提供服务代理功能,将外部请求转发到内部服务器。在配置过程中,需要设置代理规则,指定哪些外部请求需要被转发,并将其映射到相应的内部服务器。此外,还可以进行负载均衡和缓存配置,以提高服务的可用性和性能。
相关文章:

Gateway 基本配置指南:构建高效的网络接入网关
简介: Gateway 是一个常用的网络接入网关,它可以帮助组织实现安全、可靠和高性能的网络连接。本文将介绍 Gateway 的基本配置,帮助读者了解如何正确配置和部署一个高效的 Gateway 网关。 1.网络拓扑规划: 在配置 Gateway 前&#…...
自定义类型: 结构体 (详解)
本文索引 一. 结构体类型的声明1. 结构体的声明和初始化2. 结构体的特殊声明3. 结构体的自引用 二. 结构体内存对齐1. 对齐规则2. 为啥存在对齐?3. 修改默认对齐值 三. 结构体传参四. 结构体实现位段1. 什么是位段?2. 位段的内存分配3. 位段的应用4. 位段的注意事项 前言:…...
:访问者模式)
设计模式(23):访问者模式
定义 表示一个作用于某对象结构中的各元素的操作,它使我们可以在不改变元素的类的前提下定义作用与这些元素的新操作。 模式动机 对于存储在一个集合中的对象,他们可能具有不同的类型(即使有一个公共的接口),对于该集合中的对象࿰…...
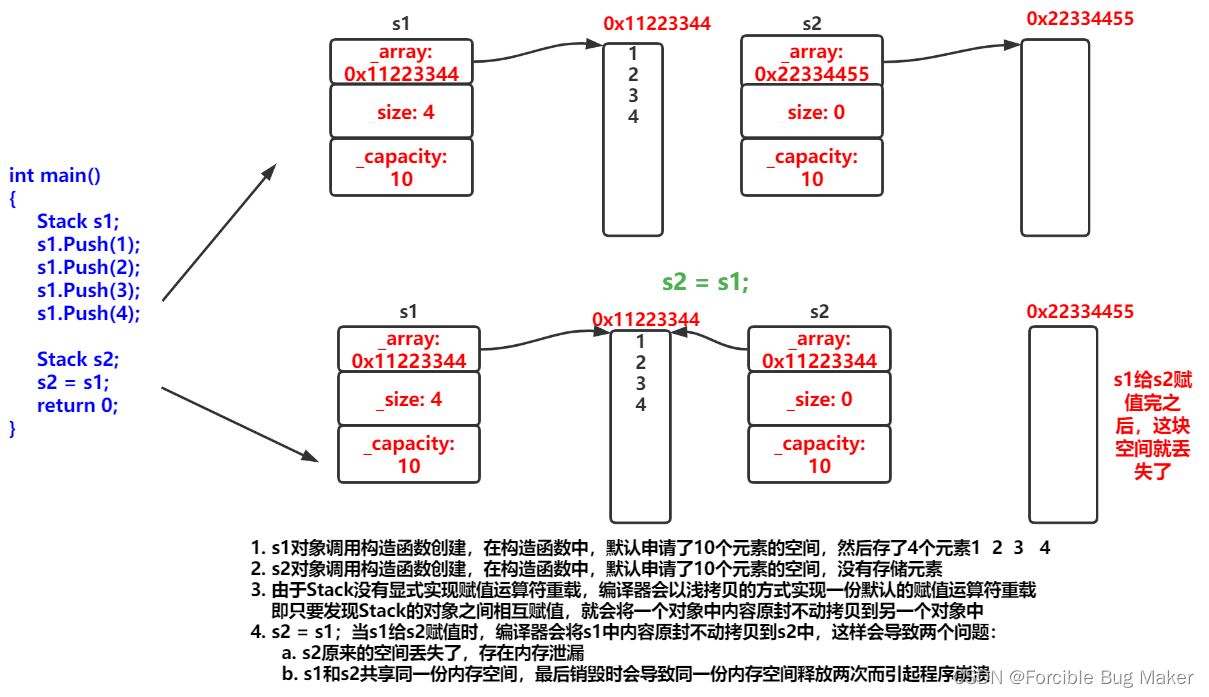
【C++】类和对象③(类的默认成员函数:拷贝构造函数 | 赋值运算符重载)
🔥个人主页:Forcible Bug Maker 🔥专栏:C 目录 前言 拷贝构造函数 概念 拷贝构造函数的特性及用法 赋值运算符重载 运算符重载 赋值运算符重载 结语 前言 本篇主要内容:类的6个默认成员函数中的拷贝构造函数…...
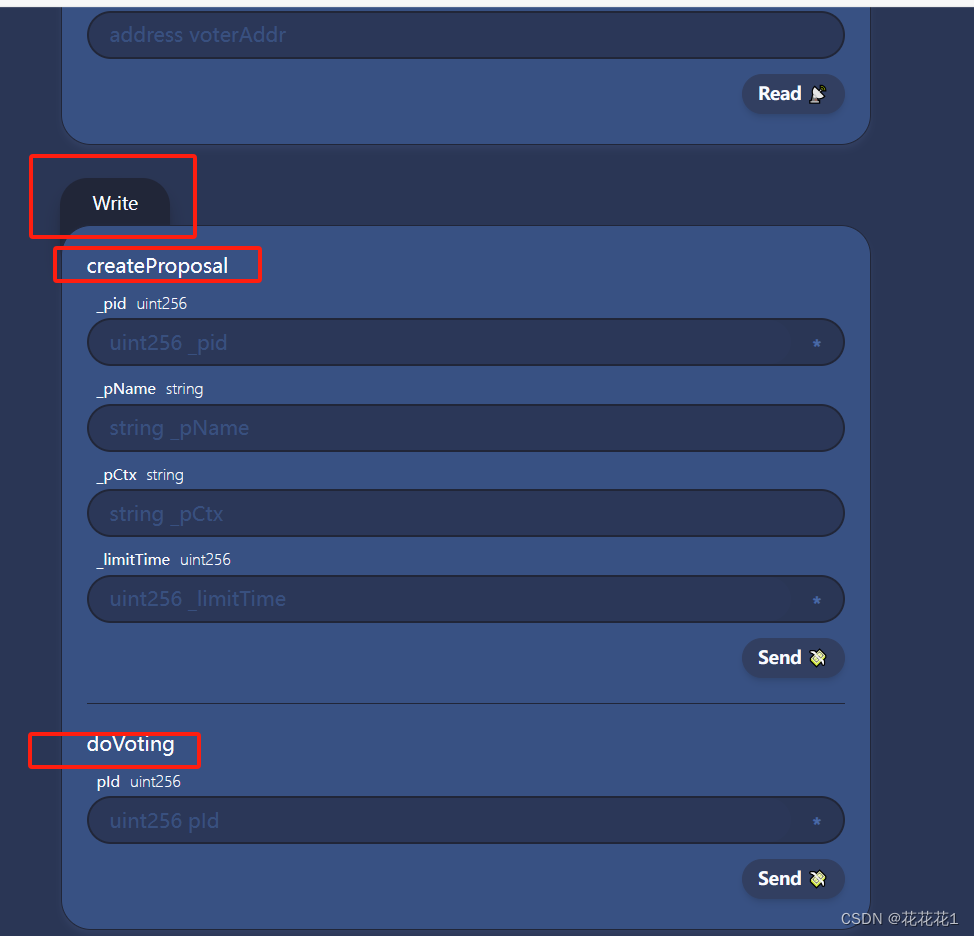
掀起区块链开发狂潮!Scaffold-eth带你一键打造震撼DApp
文章目录 前言一、Scaffold-eth是什么?二、安装和配置1.准备工作2.安装3.配置开发环境 三、进阶使用1.放入自己的合约2.部署运行 总结 前言 前面的文章传送🚪:hardhat入门 与 hardhat进阶 在之前的文章中,我们已经探讨了使用Har…...

【Qt 学习笔记】Qt常用控件 | 按钮类控件Check Box的使用及说明
博客主页:Duck Bro 博客主页系列专栏:Qt 专栏关注博主,后期持续更新系列文章如果有错误感谢请大家批评指出,及时修改感谢大家点赞👍收藏⭐评论✍ Qt常用控件 | 按钮类控件Check Box的使用及说明 文章编号:…...

android gradle 配置远程仓库
build.gradle buildscript { ext.kotlin_version "1.6.0" // 使用适合你项目的Kotlin版本 repositories { maven { url http://maven.aliyun.com/nexus/content/groups/public/ } maven { url http://maven.aliyun.com/nexus/content/repos…...

第十二章 OpenGL ES 基础-色温、色调、亮度、对比度、饱和度、高光
第十二章 OpenGL ES 基础-色温、色调、亮度、对比度、饱和度、高光 第一章 OpenGL ES 基础-屏幕、纹理、顶点坐标 第二章 OpenGL ES 基础-GLSL语法简单总结 第三章 OpenGL ES 基础-GLSL渲染纹理 第四章 OpenGL ES 基础-位移、缩放、旋转原理 第五章 OpenGL ES 基础-透视投影…...

力扣经典150题解析之二十八:盛最多水的容器
目录 力扣经典150题解析之二十八:盛最多水的容器1. 介绍2. 问题描述3. 示例4. 解题思路5. 算法实现6. 复杂度分析7. 测试与验证测试用例设计测试结果分析 8. 总结9. 参考文献感谢阅读 力扣经典150题解析之二十八:盛最多水的容器 1. 介绍 在这篇文章中&…...
:Framework层)
Rockchip Android13 Vold(二):Framework层
目录 前言 1、接收VolumeInfo状态 2、通知VolumeInfo状态变化 3、创建StorageVolume...

Oracle数据库故障类别及日常运维规划策略
一、故障类别 1、语句故障 单个数据库操作失败(select、insert、update或delete),如: 在表中输入无效的数据,解决方法:可与用户合作来验证并更正数据;执行操作,但权限不足&#x…...

电商技术揭秘九:搜索引擎中的SEO数据分析与效果评估
相关系列文章 电商技术揭秘一:电商架构设计与核心技术 电商技术揭秘二:电商平台推荐系统的实现与优化 电商技术揭秘三:电商平台的支付与结算系统 电商技术揭秘四:电商平台的物流管理系统 电商技术揭秘五:电商平台的个性…...
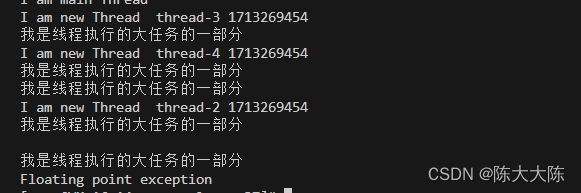
多线程传参以及线程的优缺点
进程是资源分配的基本单位 线程是调度的基本单位 笼统来说,线程有以下优点: 创建一个新线程的代价要比创建一个新进程小得多 与进程之间的切换相比,线程之间的切换需要操作系统做的工作要少很多 线程占用的资源要比进程少很多 能充分利用多…...
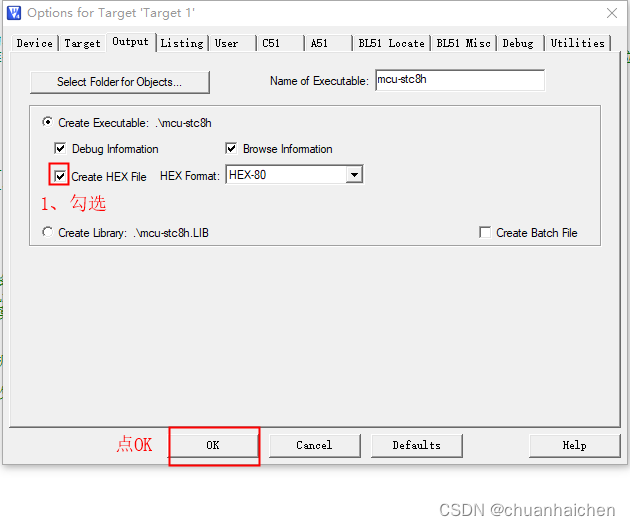
keil创建单片机工程
一、创建工程 打开Keil uVision4,依次选择 Project—>New uVision4 Project,选择工程保存路径及填写工程名称,如下图 然后点“保存”。在Select a CPU Data Base File中选择"STC MCU Database",点 "OK"&am…...
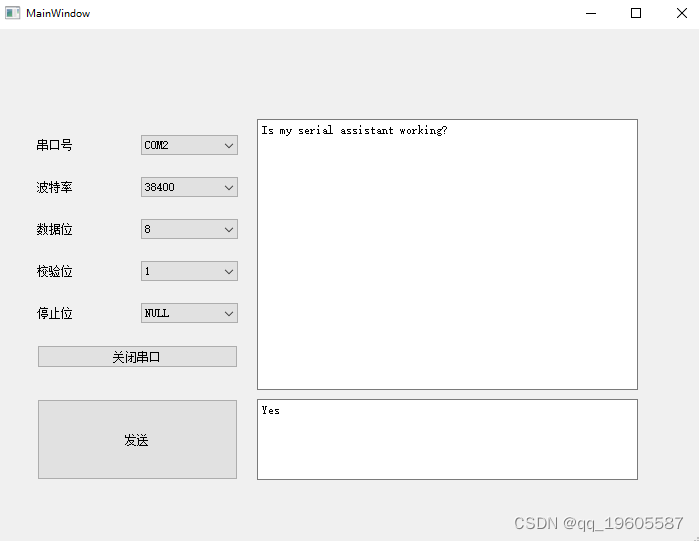
QT 串口助手 学习制作记录
QT 串口助手qt 学习制作记录 参考教程:QT初体验:手把手带你写一个自己的串口助手_qt设计串口助手的流程图-CSDN博客 Qt之串口编程(添加QSerialPort模块)_如何安装 qt串口模块教程-CSDN博客 串口调试助手࿱…...

Github 2024-04-13 Rust开源项目日报Top10
根据Github Trendings的统计,今日(2024-04-13统计)共有10个项目上榜。根据开发语言中项目的数量,汇总情况如下: 开发语言项目数量Rust项目10CUE项目1Go项目1Tauri: 构建小型、快速和安全的桌面应用程序 创建周期:1673 天开发语言:Rust协议类型:Apache License 2.0Star数量…...

大模型日报|今日必读的10篇大模型论文
大家好,今日必读的大模型论文来啦! 1.谷歌推出新型 Transformer 架构:反馈注意力就是工作记忆 虽然 Transformer 给深度学习带来了革命性的变化,但二次注意复杂性阻碍了其处理无限长输入的能力。 谷歌研究团队提出了一种新型 T…...
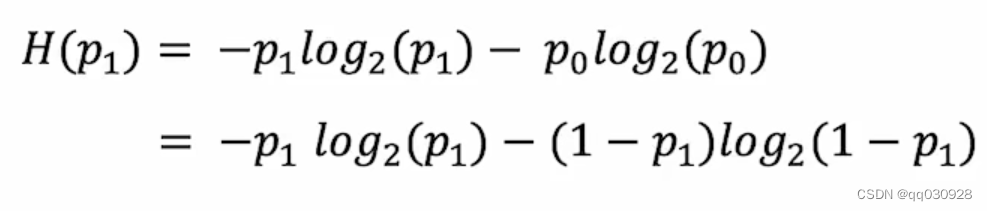
深度学习 Lecture 8 决策树
一、决策树模型(Decision Tree Model) 椭圆形代表决策节点(decison nodes),矩形节点代表叶节点(leaf nodes),方向上的值代表属性的值, 构建决策树的学习过程: 第一步:决定在根节点…...

打包 docker 容器镜像到另一台电脑
# 提交容器为镜像 <container_id> 容器id my_migration_image 镜像名称 docker commit <container_id> my_migration_image # 保存镜像为tar文件 docker save my_migration_image > my_migration_image.tar 在另一台电脑上导入上面的镜像,请…...

贪心算法--购买股票
给你一个整数数组 prices ,其中 prices[i] 表示某支股票第 i 天的价格。 在每一天,你可以决定是否购买和/或出售股票。你在任何时候 最多 只能持有 一股 股票。你也可以先购买,然后在 同一天 出售。 返回 你能获得的 最大 利润 。 示例 1&a…...
PixelAnnotationTool:破解语义分割标注效率瓶颈的智能解决方案
PixelAnnotationTool:破解语义分割标注效率瓶颈的智能解决方案 【免费下载链接】PixelAnnotationTool Annotate quickly images. 项目地址: https://gitcode.com/gh_mirrors/pi/PixelAnnotationTool 在计算机视觉领域,高质量的语义分割数据标注是…...

超净实验室建设公司厂家:如何根据需求选择方案|中南实验室建设
在半导体制造、地质微量元素分析、生物制药等高精度领域,实验环境的洁净度直接影响数据可靠性与产品良率。超净实验室作为核心基础设施,其建设需融合空气动力学、材料科学、自动化控制等多学科技术。 一、超净实验室建设公司厂家的设计规划:…...

电子仪器CE标志合规:从技术文件到尽职调查的完整指南
1. CE标志合规:从品牌声誉到技术文件的完整闭环在电子设计与制造领域,无论你开发的是精密的数据采集卡、复杂的信号发生器,还是看似简单的万用表,只要你的产品最终要进入欧洲经济区(EEA)市场,CE…...

LeetCode 岛屿数量题解
LeetCode 岛屿数量题解 题目描述 给定一个二维网格地图 1(陆地)和 0(水),计算岛屿的数量。 示例: 输入:grid [ ["1","1","1","1","0"], …...

EmbBERT架构解析:面向TinyML的革新设计与优化
1. EmbBERT架构解析:面向TinyML的革新设计在边缘计算设备上部署自然语言处理模型一直面临内存和计算资源的双重限制。传统BERT模型即使经过压缩,其2MB版本在TinyNLP基准测试中平均准确率仅为83.93%,且激活内存占用高达1.5MB。EmbBERT通过三大…...

教培机构管理越忙越乱?用对工具,比多雇两个人更高效
不少培训机构校长都有同样的感受:明明团队很拼,每天从早忙到晚,可机构依旧问题不断。招生线索散落在微信、表格、登记本里,跟进不及时就白白流失;排课全靠人工核对,老师冲突、教室撞期、调课通知不到位是常…...

天气图片分类模型:基于迁移学习与GPU资源优化
天气图片分类模型:基于迁移学习与GPU资源优化 1. 引言 天气识别在自动驾驶、户外监控、气象服务等领域具有重要应用价值。传统方法依赖于手工设计的特征(如纹理、颜色直方图),鲁棒性不足。深度学习尤其是卷积神经网络(CNN)能够自动从图像中学习层次化特征,显著提升分类…...

如何高效使用炉石传说脚本:终极完整指南解决你的自动化难题
如何高效使用炉石传说脚本:终极完整指南解决你的自动化难题 【免费下载链接】Hearthstone-Script Hearthstone script(炉石传说脚本) 项目地址: https://gitcode.com/gh_mirrors/he/Hearthstone-Script 你是否厌倦了炉石传说中重复性的…...

知识图谱与智能体如何革新小说创作:graphify-novel项目深度解析
1. 项目概述:用知识图谱为你的小说创作装上“第二大脑”如果你是一位小说创作者,无论是网文作者、传统文学写作者,还是游戏叙事设计师,你一定经历过这样的痛苦时刻:写到第30章,突然想不起某个配角在第5章出…...

Windows平台ADB驱动终极安装指南:3分钟搞定Android开发环境
Windows平台ADB驱动终极安装指南:3分钟搞定Android开发环境 【免费下载链接】Latest-adb-fastboot-installer-for-windows A Simple Android Driver installer tool for windows (Always installs the latest version) 项目地址: https://gitcode.com/gh_mirrors/…...