计算机视觉——OpenCV Python基于颜色识别的目标检测
1. 计算机视觉中的颜色空间
颜色空间在计算机视觉领域的应用非常广泛,它们在图像和视频处理、物体检测等任务中扮演着重要角色。颜色空间的主要作用是将颜色以数值形式表示出来,这样计算机算法就能够对其进行处理和分析。不同的颜色空间有着不同的特点和适用场景,下面我们来快速了解一下几种最常用的颜色空间:
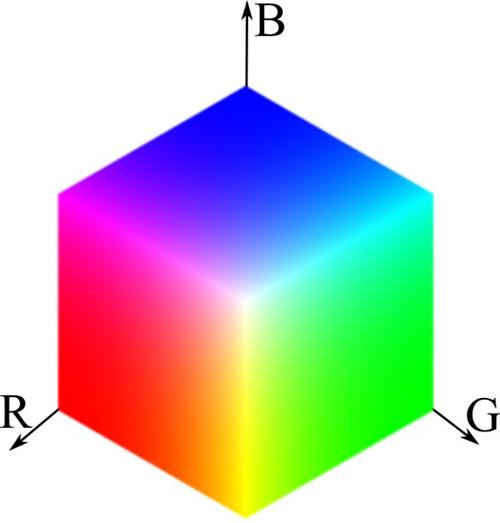
- RGB颜色空间:这是最常用的颜色空间之一,特别是在计算机显示和数字图像处理中。RGB代表红色(Red)、绿色(Green)、蓝色(Blue),这三种基本颜色可以通过不同比例的混合来生成其他颜色。RGB颜色空间是一个三维空间,每个颜色由三个分量的强度值决定,通常范围在0到255之间。这种颜色空间直观地反映了颜色的组成,但它并不总是与人眼对颜色的感知完全一致。
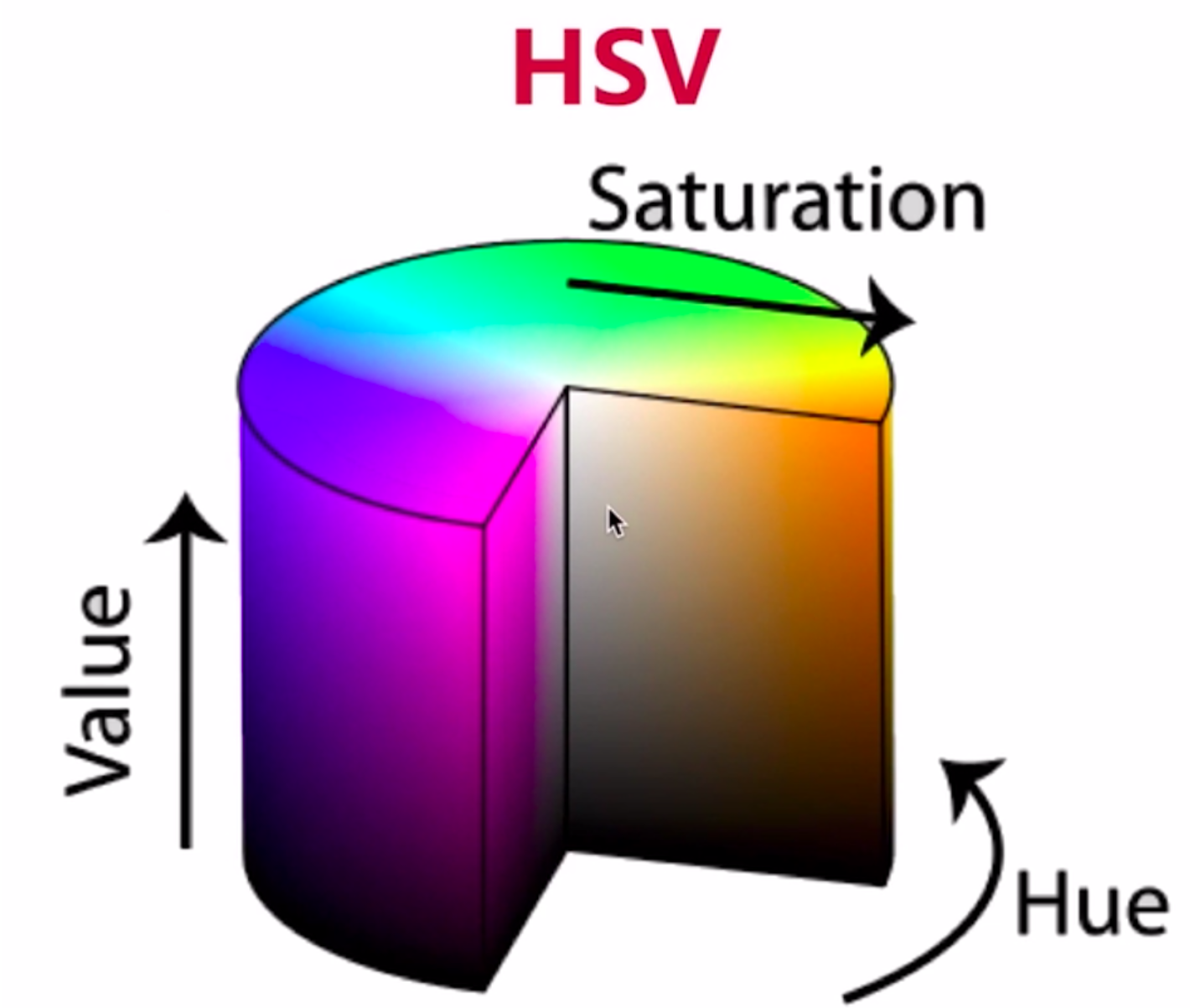
- HSV颜色空间:HSV代表色调(Hue)、饱和度(Saturation)和亮度(Value)。HSV颜色空间特别适合于颜色分割和基于颜色的物体识别任务。色调表示颜色的种类,类似于色轮上的角度,范围从0到360度;饱和度表示颜色的纯度,从0%(灰色)到100%(完全饱和的颜色);亮度表示颜色的明暗程度,从0%(黑色)到100%(白色)。HSV颜色空间将颜色信息与亮度信息分离,因此在不同的光照条件下进行颜色识别时更为鲁棒。
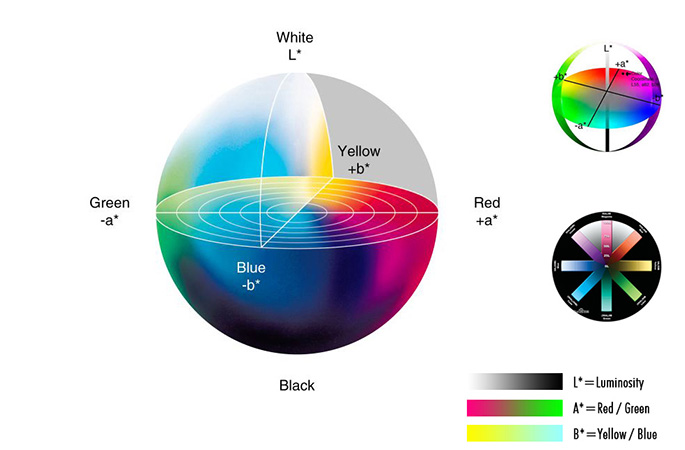
- LAB颜色空间:LAB颜色空间包括亮度(L*)、从绿到红的色度(a*)以及从蓝到黄的色度(b*)。这种颜色空间的设计旨在更好地匹配人类视觉的感知特性,使得颜色之间的数值差异与我们感知到的差异更为接近。LAB颜色空间特别适合于需要精确颜色差异匹配的应用场景,如颜色编辑和校正。
2. HSV颜色空间
颜色空间的选择对于计算机视觉应用的性能有着显著影响。每种颜色空间都有其独特的属性,使其适用于特定的任务和场景。HSV颜色空间在基于颜色的物体检测中特别受欢迎,原因如下:
-
颜色与亮度分离:HSV颜色空间的一个关键特点是它将颜色信息(色调H)与亮度信息(亮度V)分开表示。这意味着即使在光照条件发生变化的情况下,物体的颜色特征(色调和饱和度)也能保持相对稳定。这种分离使得HSV颜色空间在处理光照变化时更为鲁棒,因为可以通过调整色调和饱和度的范围来检测特定颜色的物体,而不受亮度变化的影响。
-
直观的颜色表示:HSV颜色空间提供了一种更接近人类对颜色感知的表示方式。色调H是颜色的基本属性,它描述了颜色的种类,如红色、绿色或蓝色。饱和度S描述了颜色的纯度,即颜色的强度或鲜艳程度。这使得在HSV空间中定义和识别颜色变得更加直观和容易。
-
易于调整和过滤:在HSV颜色空间中,可以通过设置色调、饱和度和亮度的阈值来创建颜色掩码,从而过滤和检测特定颜色的物体。这种方法在图像处理和计算机视觉中非常有用,尤其是在需要从复杂背景中分离出特定颜色物体的应用中。
-
对阴影和反射的鲁棒性:由于HSV颜色空间将颜色与亮度分离,因此在物体被阴影覆盖或反射光线时,仍然可以有效地识别物体的颜色特征。这对于在各种环境条件下进行物体检测尤为重要。
HSV颜色空间是一种将颜色以色调(Hue)、饱和度(Saturation)和值(Value)三个维度来表示的方法,这种表示方式更接近人类对颜色的感知和理解:
-
色调(Hue):色调是颜色的基本属性,它描述了颜色的种类。色调通常用角度值来表示,范围从0度到360度。在HSV颜色模型中,色调的度量是以色轮为基础的,其中红色通常对应于0度(或360度,因为色轮是连续的),绿色对应于120度,蓝色对应于240度。色调的这种表示方式使得颜色的选择和调整变得直观,因为它与我们在日常生活中描述颜色的方式相一致。
-
饱和度(Saturation):饱和度描述了颜色的纯度或强度。饱和度的值范围从0%到100%,其中0%表示完全缺乏颜色(即灰色),而100%表示完全饱和的颜色。高饱和度的颜色看起来鲜艳、生动,而低饱和度的颜色则看起来暗淡、柔和。饱和度的调整可以改变图像的整体外观,使其看起来更生动或更柔和。
-
值(Value):值表示颜色的明暗程度,也就是颜色的亮度。值的范围也是从0%到100%,其中0%代表纯黑色,100%代表纯白色。值的改变可以影响颜色的明暗对比,但不会影响颜色的色调和饱和度。通过调整值,可以使物体在不同光照条件下保持其颜色特征,这对于在变化的环境中进行物体检测和识别非常重要。
3.基于颜色的物体检测

现在的目标是检测图像中的高尔夫球。创建一个名为color_detection_image.py的新文件,并添加以下代码:
import cv2# 读取图像
image = cv2.imread("examples/1.jpg")# 从BGR转换为HSV颜色空间
hsv_image = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
第一步是读取图像并将其从BGR转换为HSV颜色空间。可以使用cv2.cvtColor()函数,并使用cv2.COLOR_BGR2HSV标志从BGR转换为HSV颜色空间。现在,定义想要检测的颜色范围。在这个例子中,将检测球的白色。可以通过定义HSV颜色空间的下限和上限来实现这一点。
对于白色,下限是(75, 0, 99),上限是(179, 62, 255)。可以更改这些值以检测其他颜色。这里创建了一个简单的Python脚本(一个HSV颜色选择器),这能获取的颜色的HSV值。要获取上面图像中白色高尔夫球的下限和上限,可以运行hsv_color_picker_images.py脚本,然后调整值直到获得所需的结果。这是的图像的一个示例:
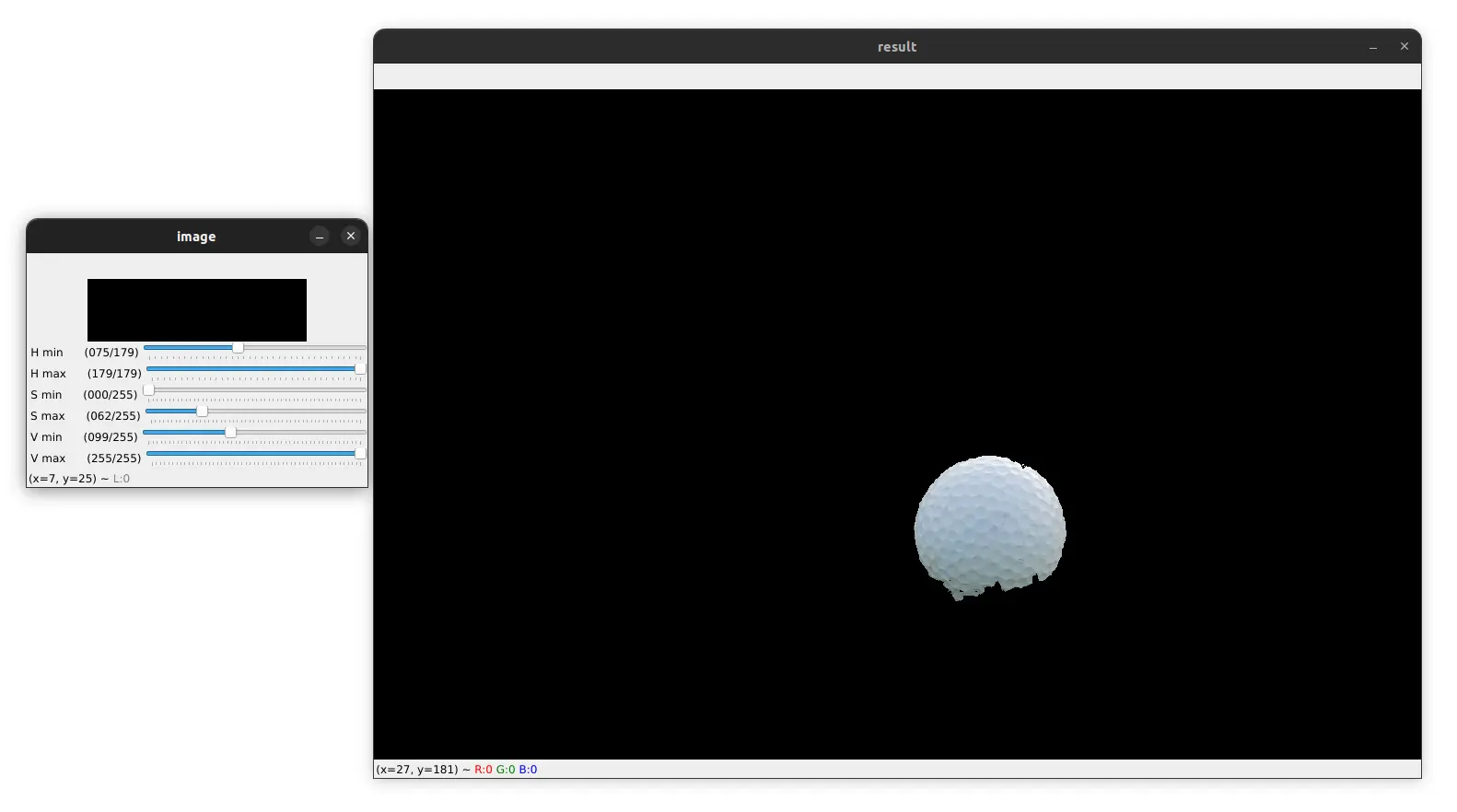
# 白色下限和上限
lower_limit = np.array([75,0,99
])upper_limit = np.array([179,62,255
])# 为指定的颜色范围创建掩码
mask = cv2.inRange(hsv_image, lower_limit, upper_limit)# 从掩码图像中获取边界框
bbox = cv2.boundingRect(mask)
然后使用cv2.inRange()函数为指定的颜色范围创建掩码。该函数接受HSV图像和颜色范围的下限和上限作为输入,并返回一个二进制掩码图像。然后可以使用cv2.boundingRect()函数获取图像中物体的边界框。该函数接受掩码图像作为输入,并返回边界框坐标(x, y, w, h),其中(x, y)是边界框的左上角,而(w, h)是边界框的宽度和高度。
# 如果我们得到一个边界框,使用它在图像上绘制一个矩形
if bbox is not None:print("物体检测到")x, y, w, h = bboxcv2.rectangle(image, (x, y), (x + w, y + h), (0, 255, 0), 2)
else:print("物体未检测到")cv2.imshow('图像', image)
cv2.waitKey(0)

4.视频中颜色的物体检测
# 初始化视频捕获对象
cap = cv2.VideoCapture("examples/1.mp4")# 获取视频流中帧的宽度、高度和fps。
frame_width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
frame_height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = int(cap.get(cv2.CAP_PROP_FPS))# 初始化FourCC和视频编写器对象
fourcc = cv2.VideoWriter_fourcc(*'XVID')
output = cv2.VideoWriter('output.mp4', fourcc, fps, (frame_width, frame_height))
使用cv2.VideoCapture()函数初始化视频捕获对象。将视频文件的路径作为输入。然后使用cv2.CAP_PROP_FRAME_WIDTH、cv2.CAP_PROP_FRAME_HEIGHT和cv2.CAP_PROP_FPS属性获取视频流中帧的宽度、高度和fps。然后可以初始化cv2.VideoWriter对象来写入输出视频。将输出视频文件的路径、FourCC代码、fps和帧的宽度和高度作为输入。
现在,让逐帧读取视频并对每一帧执行基于颜色的物体检测:
while True:ret, frame = cap.read()if not ret:print("没有更多帧可读,退出...")break# 从BGR转换为HSV颜色空间hsv_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
读取视频后,循环遍历帧并检查帧是否成功读取,使用ret变量。如果帧未成功读取,打印一条消息,表示没有更多帧可读并退出循环。如果帧成功读取,使用cv2.cvtColor()函数将帧的颜色空间从BGR转换为HSV。现在,检测的定义颜色范围。
# 蓝色下限和上限
lower_limit = np.array([99,135,51
])upper_limit = np.array([116,226,255
])mask = cv2.inRange(hsv_frame, lower_limit, upper_limit)bbox = cv2.boundingRect(mask)
然后为指定的颜色范围创建掩码并获取帧中物体的边界框。然后使用边界框坐标在帧上绘制一个矩形(如果边界框不为空)并显示帧。将帧写入输出视频文件并检查用户是否按下了q键。如果退出循环。
相关文章:
计算机视觉——OpenCV Python基于颜色识别的目标检测
1. 计算机视觉中的颜色空间 颜色空间在计算机视觉领域的应用非常广泛,它们在图像和视频处理、物体检测等任务中扮演着重要角色。颜色空间的主要作用是将颜色以数值形式表示出来,这样计算机算法就能够对其进行处理和分析。不同的颜色空间有着不同的特点和…...

2024中国内燃机展-北京汽车发动机零部件展
2024第二十三届中国国际内燃机与零部件展览会 由中国内燃机工业协会主办、中国机床专用技术设备有限公司、汽车工艺装备成套开发集团协办的2024中国国际内燃机及动力装备博览会(简称“动博会”)将于2024年10月11日-13日在亦创国际会展中心隆重举办。本届…...
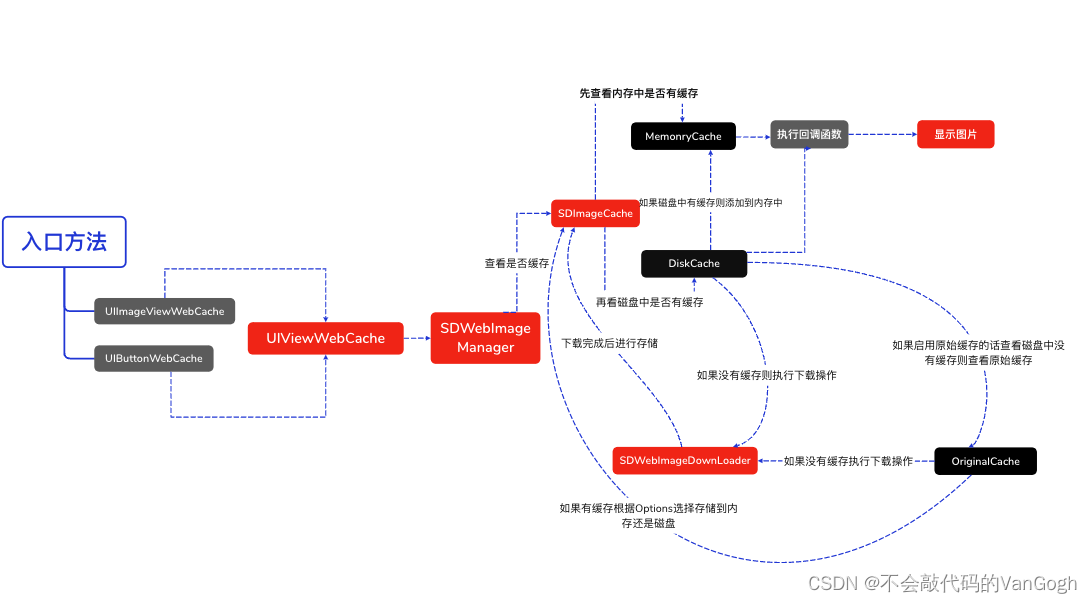
【iOS】——SDWebImage源码学习
文章目录 一、SDWebIamge简介二、SDWebImage的调用流程SDWebImage源码分析1.UIImageViewWebCache层2.UIViewWebCache层3.SDWebManager层4.SDWebCache层5.SDWebImageDownloader层 一、SDWebIamge简介 SDWebImage是iOS中提供图片加载的第三方库,可以给UIKit框架中的控…...

树和二叉树(一)
一、树 非线性数据结构,在实际场景中,存在一对多,多对多的情况。 树( tree)是n (n>0)个节点的有限集。当n0时,称为空树。 在任意一个非空树中,有如下特点。 1.有且仅有一个特定的称为根的节点…...
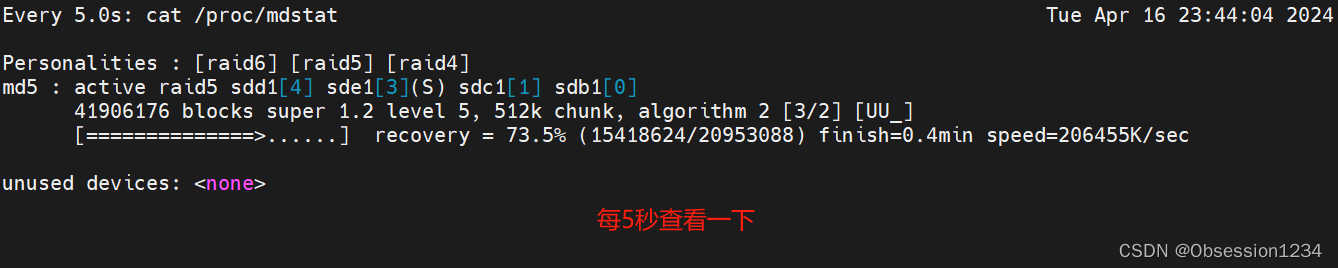
RAID 磁盘阵列及RAID配置实战
目录 一.RAID磁盘阵列介绍 二.常用的RAID磁盘阵列的介绍 1.RAID 0 (条带化存储) 2.RAID 1(镜像存储) 3.RAID 5 4.RAID 6 5.RAID 10(先做镜像,再做条带) 6.RAID 01 (先做条带…...
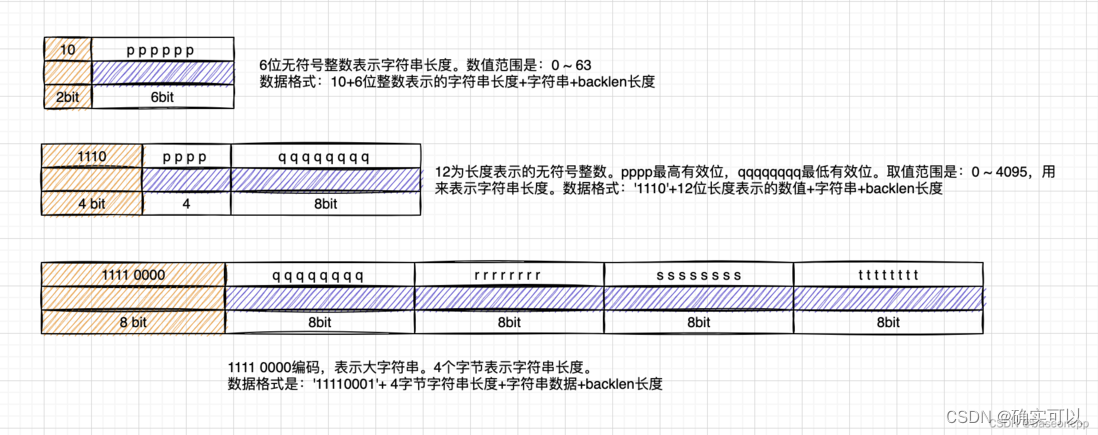
listpack
目录 为什么有listpack? listpack结构 listpack的节点entry 长度length encoding编码方式 listpack的API 1.创建listpack 2.遍历操作 正向遍历 反向遍历 3.查找元素 4.插入/替换/删除元素 总结 为什么有listpack? ziplist是存储在连续内存空间,节省…...

Web3与社会契约:去中心化治理的新模式
在数字化时代,技术不断为我们提供新的可能性,而Web3技术作为一种基于区块链的创新,正在引领着互联网的下一波变革。它不仅改变了我们的经济模式和商业逻辑,还对社会契约和权力结构提出了全新的挑战和思考。本文将深入探讨Web3的基…...

实体类List重复校验
如果实体类有多个属性,并且你希望根据所有属性的组合来进行重复校验,你可以考虑以下几种方法: 使用集合存储已经出现过的实体对象: 将每个实体对象放入一个 Set 中进行重复校验。在 Set 中元素的比较可以使用自定义的 equals 方法…...

loadash常用的函数方法
Lodash是一个JavaScript实用工具库,提供了很多常用的函数方法来简化开发过程。以下是一些常用的Lodash函数方法: _.map(array, iteratee):对数组中的每个元素应用一个函数,并返回结果数组。_.filter(collection, predicate)&…...

【零基础入门TypeScript】模块
目录 内部模块 内部模块语法(旧) 命名空间语法(新) 两种情况下生成的 JavaScript 是相同的 外部模块 选择模块加载器 定义外部模块 句法 例子 文件:IShape.js 文件:Circle.js 文件:…...

Scala 之数组
可变数组与不可变数组 import scala.collection.mutable.ArrayBuffer// 不可变数组。 长度不可变,但是元素的值可变 object Demo1 {def main(args: Array[String]): Unit {// 不可变数组定义方式// 未初始化有默认值 Int > 0val arr1 : Array[Int] new Arr…...

【Phytium】飞腾D2000 UEFI/EDK2 适配 RTC(IIC SD3077)
文章目录 0. env1. 软件2. 硬件 10. 需求1. 硬件2. 软件 20. DatasheetCPURTC 30. 调试步骤1. 硬件环境搭建2. UEFI 开发环境搭建3. 修改步骤1. UEFI 中使能RTC驱动、配置RTC信息等1.1 使能RTC驱动1.2 修改RTC对应的IIC配置信息1.3 解决驱动冲突1.4 验证波形 2. 修改对应RTC驱动…...
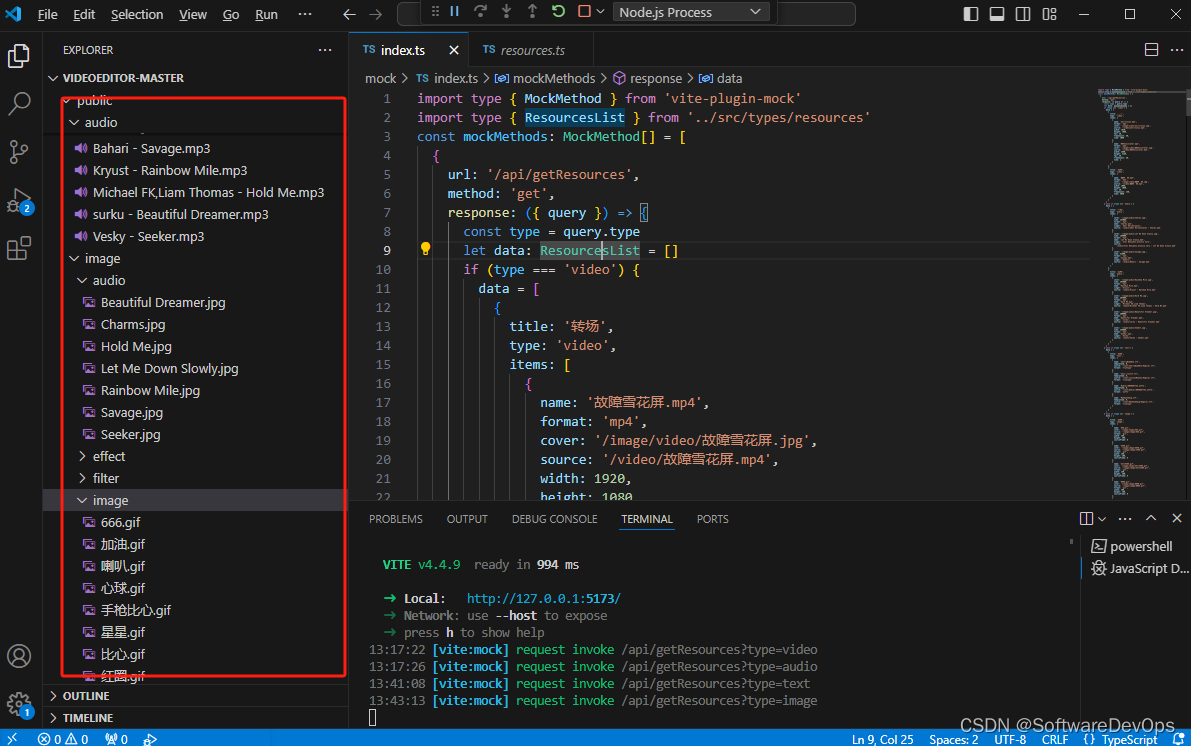
如何利用纯前端技术,实现一个网页版视频编辑器?
纯网页版视频编辑器 一、前言二、功能实现三、所需技术四、部分功能实现4.1 素材预设4.2 多轨道剪辑 一、前言 介绍:本篇文章打算利用纯前端的技术,来实现一个网页版的视频编辑器。为什么突然想做一个这么项目来呢,主要是最近一直在利用手机…...
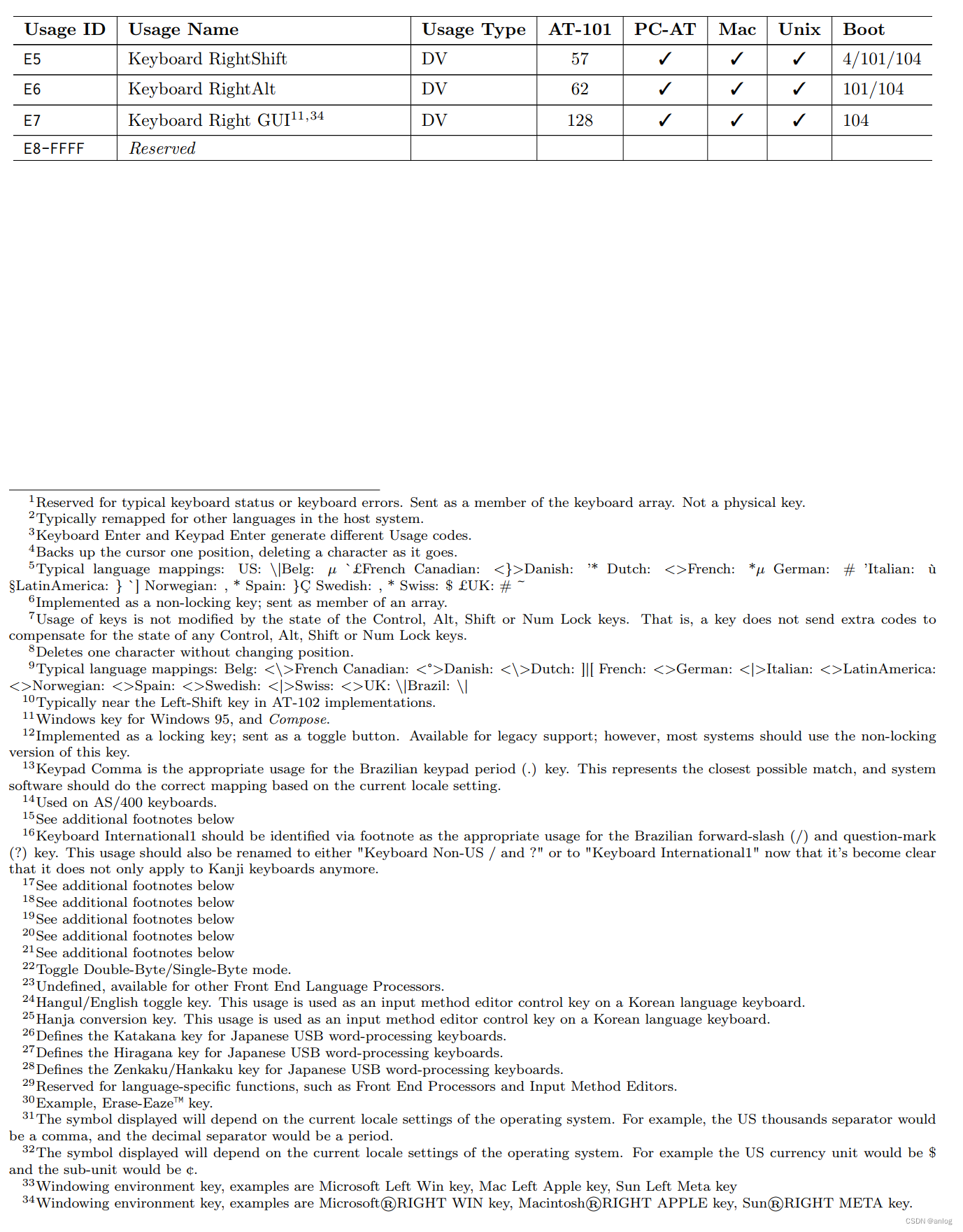
stm32实现hid键盘
前面的cubelmx项目配置参考 stm32实现hid鼠标-CSDN博客https://blog.csdn.net/anlog/article/details/137814494?spm1001.2014.3001.5502两个项目的配置完全相同。 代码 引用 键盘代码: 替换hid设备描述符 先屏蔽鼠标设备描述符 替换为键盘设备描述符 修改宏定…...

【单例模式】饿汉式、懒汉式、静态内部类--简单例子
单例模式是⼀个单例类在任何情况下都只存在⼀个实例,构造⽅法必须是私有的、由⾃⼰创建⼀个静态变量存储实例,对外提供⼀个静态公有⽅法获取实例。 目录 一、单例模式 饿汉式 静态内部类 懒汉式 反射可以破坏单例 道高一尺魔高一丈 枚举 一、单例…...
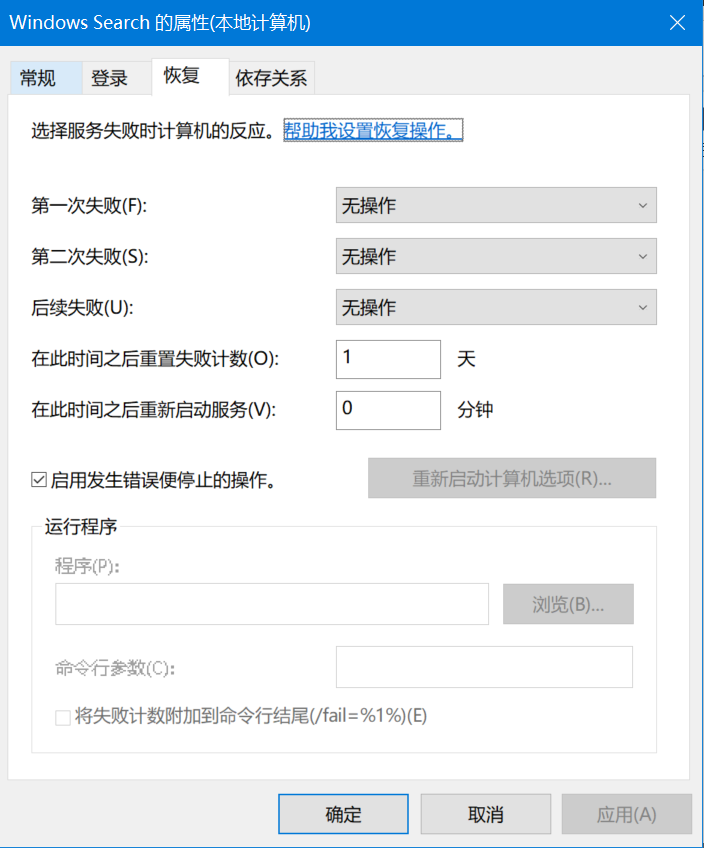
windows关闭Windows Search功能
我发现windows最恶心的功能就是自动更新和搜索。自动更新就是个毒瘤,得到了全世界的人讨厌。 而搜索功能难用、慢和造成卡死,根本没有存在的必要。并且他的windows search filter服务会在每次移动大量文件后建立索引,持续的占用cpu和硬盘的资…...
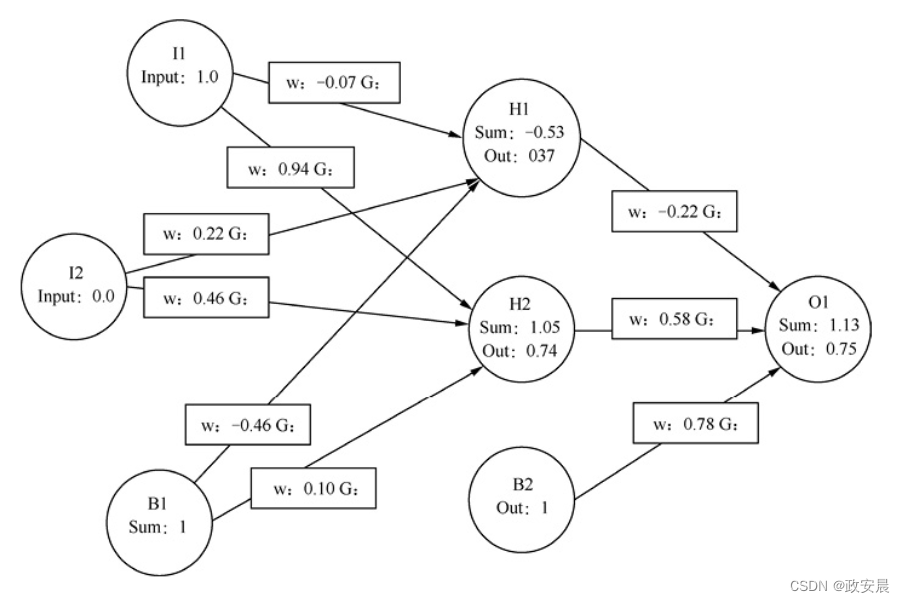
政安晨:【深度学习神经网络基础】(九)—— 在深度学习神经网络反向传播训练中理解梯度
目录 简述 理解梯度 什么是梯度 计算梯度 政安晨的个人主页:政安晨 欢迎 👍点赞✍评论⭐收藏 收录专栏: 政安晨的机器学习笔记 希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在评论区提出指正! 简述 在深度…...

免费的 ChatGPT、GPTs、AI绘画(国内版)
🔥博客主页:白云如幻❤️感谢大家点赞👍收藏⭐评论✍️ ChatGPT3.5、GPT4.0、GPTs、AI绘画相信对大家应该不感到陌生吧?简单来说,GPT-4技术比之前的GPT-3.5相对来说更加智能,会根据用户的要求生成多种内容甚…...

UniApp 微信小程序:在 onLaunch 中等待异步方法执行完成后,再调用页面中的接口
最近遇到了一个问题:在 App.vue 中的 onLaunch 中调用登录接口时,由于异步登录尚未完成就调用了 index 页面的接口,导致 token 异常。如何确保页面在 App 中的 onLaunch 执行完毕后再继续执行呢? 在网上查阅了一些资料,…...

【招贤纳士】长期有效
【招贤纳士】长期有效,有意者联系 一、SLAM算法工程师工作内容:任职资格: 二、规划算法工程师工作内容:任职资格: 三、感知算法工程师岗位职责:任职要求:加分项: 四、传感器系统工程…...

Blender 3MF插件:5分钟掌握3D打印文件格式转换的完整方案
Blender 3MF插件:5分钟掌握3D打印文件格式转换的完整方案 【免费下载链接】Blender3mfFormat Blender add-on to import/export 3MF files 项目地址: https://gitcode.com/gh_mirrors/bl/Blender3mfFormat 你是否曾经在Blender中精心设计了完美的3D模型&…...

openclaw官网入口中文版_一键1分钟免费使用小龙虾AI!
好的,这是为您撰写的文章: OpenClaw官网入口中文版_一键1分钟免费使用小龙虾AI! 在当今人工智能技术蓬勃发展的时代,便捷、高效的AI工具正逐渐成为我们工作和学习的得力助手。今天,就让我们一起了解一个新兴的AI平台—…...

Void编辑器:轻量级插件化架构与LSP/Tree-sitter深度集成解析
1. 项目概述:一个为“创造者”而生的现代编辑器最近在开发者社区里,一个名为“Void”的编辑器项目引起了我的注意。它不像那些我们耳熟能详的庞然大物,比如 VS Code 或 Sublime Text,一上来就带着庞大的生态和复杂的功能。Void 给…...

SincNet实战:用PyTorch复现说话人识别,并探讨其对抗攻击的脆弱性与防御思路
SincNet实战:从说话人识别到对抗防御的全链路技术解析 当声纹识别系统在智能门锁中误将陌生人识别为业主时,背后可能是精心设计的音频对抗样本在作祟。SincNet作为直接从原始波形学习的CNN变体,其带通滤波器设计带来的可解释性优势࿰…...

线性码电路优化:从理论到硬件实现
1. 线性码与电路合成基础线性码在数字通信和存储系统中扮演着至关重要的角色,它通过在原始数据中添加冗余信息来实现错误检测和纠正。这种编码方式的核心数学原理基于有限域上的线性代数运算,使得编码和解码过程可以通过高效的矩阵运算实现。在硬件实现层…...

AI编程工具全景指南:从CLI到智能体,构建高效开发工作流
1. 项目概述:一份为“氛围编码”时代量身定制的开发者地图如果你是一名开发者,最近几个月一定被“氛围编码”这个词刷屏了。从Cursor、Claude Code到各种AI原生IDE和代理工具,我们仿佛一夜之间进入了一个新的编程范式。但问题也随之而来&…...

法律即代码:开源项目vericlaw如何用规则引擎实现合同自动化
1. 项目概述与核心价值最近在折腾一些自动化流程,特别是涉及到合同、协议这类法律文书的生成与审核时,发现了一个挺有意思的开源项目:Sheygoodbai/vericlaw。乍一看这个名字,结合其仓库描述,就能猜到它大概和法律&…...

机器学习在非洲传染病预测与监测中的实战应用
1. 项目概述:当AI遇见非洲传染病防控在公共卫生领域,时间就是生命,资源就是防线。对于非洲大陆而言,这句话的分量尤为沉重。这里常年承受着全球最沉重的传染病负担,从水源性传播的霍乱、致命性极高的埃博拉,…...

自动驾驶语义观察层:VLM与量化优化实践
1. 自动驾驶中的语义观察层:为什么传统方法不够用?在自动驾驶领域,我们经常遇到一些"看起来不对劲"的场景——比如一辆运输卡车后部悬挂的交通信号灯(应该遵循还是忽略?)、道路上突然出现的瘪气皮…...

2026届学术党必备的六大降重复率神器横评
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 减小AIGC率的关键之处在于使文本的统计规律性以及模式化特性得以弱化。首先,别去…...