supervisord 使用指南
supervisord 使用指南
supervisord的安装
supervisor是一系列python脚本文件,以python package的形式管理,可以用于UNIX类系统的进程管理。
安装supervisor也相当简单,只需要用pip安装即可。
sudo pip install supervisor
但是有可能将其安装在了~/.local/lib下,会导致systemd自启动管理软件找不到supervisor这个包。典型的错误为 from supervisor.supervisord import main. ERROR: No MODULE named supervisor。
此时卸载supervisor重装,需安装在系统python的dist-packages目录下,比如通过--target指定安装位置,确保supervisor和其他python包在一个目录(常见的如numpy等)
sudo pip install --target=/usr/local/lib/python3.8/dist-packages supervisor
和systemd一起管理自启动
启动链:systemd → supervisord → YOUR_APP
其中两个核心配置文件,/etc/systemd/system/supervisord.service 和 /etc/supervisord/supervisord.conf。/etc/supervisord/目录和文件自行创建
supervisord.service为systemd启动系统常驻服务supervisord的配置文件,参考如下:
[Unit]
Description=supervisord - Supervisor process control system for UNIX;
After=network.target[Service]
Type=forking
ExecStart=/usr/local/bin/supervisord -c /etc/supervisord/supervisord.conf
ExecReload=/usr/local/bin/supervisorctl reload
ExecStop=/usr/local/bin/supervisorctl shutdown[Install]
WantedBy=multi-user.target
- supervisord.conf为supervisord启动自定义程序的配置文件,参考如下:
[unix_http_server]
file=/tmp/supervisor.sock ; path to your socket file[supervisord]logfile=/home/Alex/shepherd/supervisord/supervisord.log ; supervisord log file
logfile_maxbytes=50MB ; maximum size of logfile before rotation
logfile_backups=10 ; number of backed up logfiles
loglevel=info ; info, debug, warn, trace
pidfile=/var/run/supervisord.pid ; pidfile location
nodaemon=false ; run supervisord as a daemon
minfds=1024 ; number of startup file descriptors
minprocs=200 ; number of process descriptors
user=Alex ; default user
childlogdir=/home/Alex/shepherd/supervisord ; where child log files will live[inet_http_server]
port = 127.0.0.1:9001[rpcinterface:supervisor]
supervisor.rpcinterface_factory = supervisor.rpcinterface:make_main_rpcinterface[supervisorctl]
serverurl=unix:///tmp/supervisor.sock ; use a unix:// URL for a unix socket[program:roscore]
command=/home/Alex/shepherd/supervisord/startup/rosl_roscore start-foreground
autostart=true
stopsignal=TERM
stopasgroup=true
stderr_logfile = /home/Alex/shepherd/supervisord/log/roscore-stderr.log
stdout_logfile = /home/Alex/shepherd/supervisord/log/roscore-stdout.log[program:slam]
command=/home/Alex/shepherd/supervisord/startup/rosl_slam -start-foreground
autostart=true
stopsignal=TERM
stopasgroup=true
stderr_logfile = /home/Alex/shepherd/supervisord/log/slam-stderr.log
stdout_logfile = /home/Alex/shepherd/supervisord/log/slam-stdout.log[program:sensor]
command=/home/Alex/shepherd/supervisord/startup/rosl_sensor -start-foreground
autostart=true
stopsignal=TERM
stopasgroup=true
stderr_logfile = /home/Alex/shepherd/supervisord/log/sensor-stderr.log
stdout_logfile = /home/Alex/shepherd/supervisord/log/sensor-stdout.log- 自定义程序的启动脚本
以下文件需要chmod +x权限
a. startup/rosl_sensor
#!/bin/bashsudo chmod 777 /dev/spidev3.0
source /opt/ros/noetic/setup.bash
cd /home/Alex/shepherd/fays_inside_out_sensor_bringup
source /home/Alex/shepherd/fays_inside_out_sensor_bringup/ROS/devel/setup.bash
export ROS_HOME=/home/Alex/.ros
rosrun vi_driver vi_publisher 61 &
PID=$!
wait "$PID"
在shell脚本中想要免密sudo可以sudo visudo,追加一行:
YOUR_USERNAME ALL=(ALL) NOPASSWD: /bin/chmod
b. startup/rosl_slam
#!/bin/bashsource /opt/ros/noetic/setup.bash
source /home/Alex/shepherd/vinsfusion_ws/devel/setup.bash
export ROS_HOME=/home/Alex/.ros
rosrun vins vins_node /home/Alex/shepherd/vinsfusion_ws/src/VINS-Fusion/config/OV9281_ICM42688_2_2/stereo_imu_config.yaml &
rosrun loop_fusion loop_fusion_node /home/Alex/shepherd/vinsfusion_ws/src/VINS-Fusion/config/OV9281_ICM42688_2_2/stereo_imu_config.yaml &
PID=$!
wait "$PID"
c. startup/rosl_roscore
#!/bin/bashsource /opt/ros/noetic/setup.bash
# source /home/griz/panther_ws/devel/setup.bash
export ROS_HOME=/home/Alex/.ros
roscore
PID=$!
wait "$PID"
相关文章:

supervisord 使用指南
supervisord 使用指南 supervisord的安装 supervisor是一系列python脚本文件,以python package的形式管理,可以用于UNIX类系统的进程管理。 安装supervisor也相当简单,只需要用pip安装即可。 sudo pip install supervisor但是有可能将其安…...
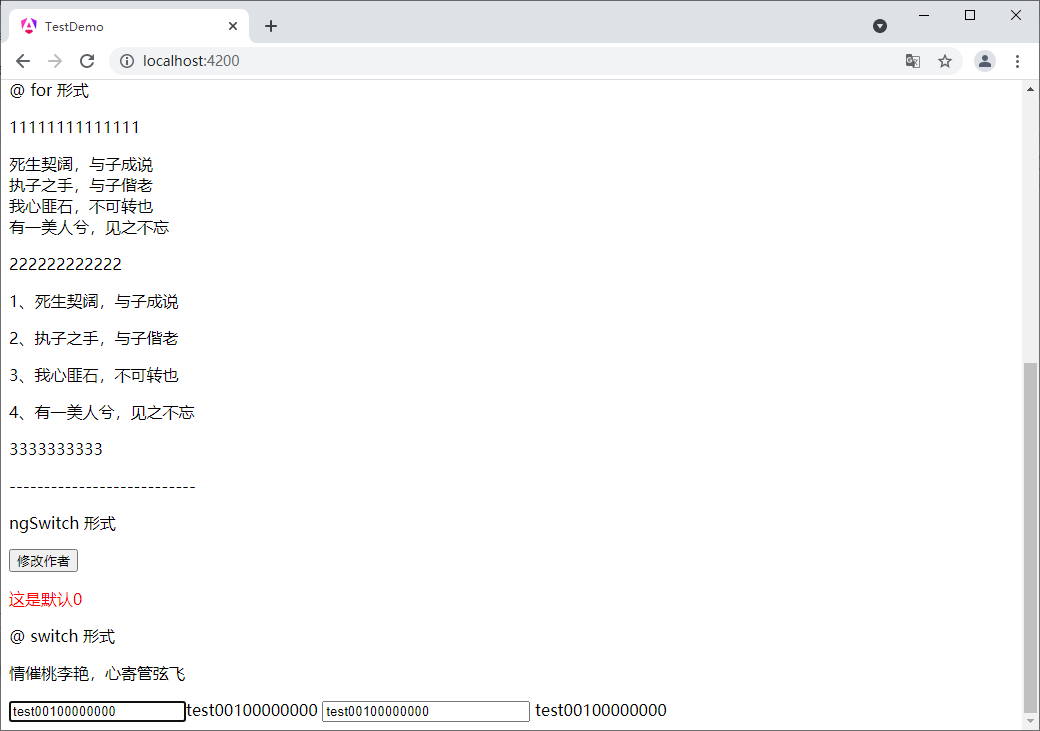
AngularJS 的生命周期和基础语法
AngularJS 的生命周期和基础语法 文章目录 AngularJS 的生命周期和基础语法1. 使用步骤2. 生命周期钩子函数3. 点击事件4. if 语句1. if 形式2. if else 形式 5. for 语句6. switch 语句7. 双向数据绑定 1. 使用步骤 // 1. 要使用哪个钩子函数,就先引入 import { O…...

docker-compose 网络
自定义网络 - HOST 与宿主机共享网络 version: "3" services:web:image: nginx:1.21.6restart: alwaysports:- 80:80network_mode: host自定义网络 - 固定ip version: "3" services:web:image: nginx:1.21.6restart: alwaysports:- 80:80networks:app&am…...

农药生产厂污废水如何处理达标
农药生产厂的污废水处理是确保该行业对环境的负面影响最小化的重要环节。下面是一些常见的处理方法和步骤,可以帮助农药生产厂的污废水达到排放标准: 预处理:将废水进行初步处理,去除大颗粒悬浮物和固体残渣。这可以通过筛网、沉淀…...
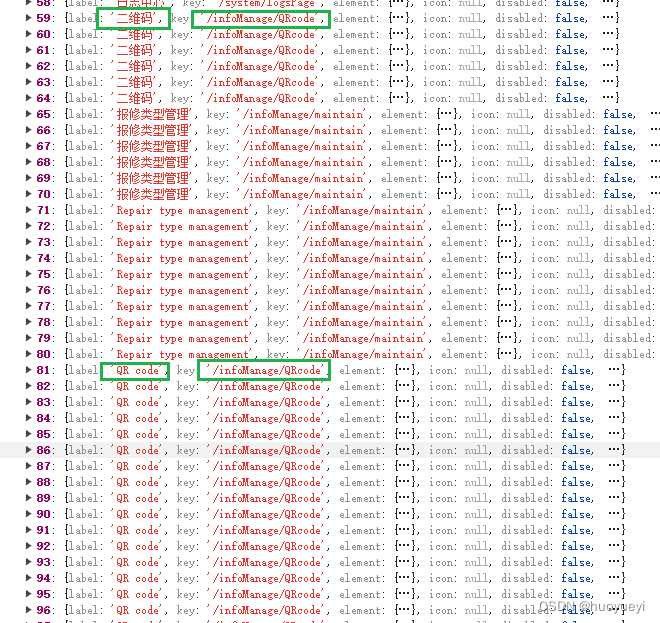
根据相同的key 取出数组中最后一个值
数组中有很多对象 , 需根据当前页面的值current 和 数组中的key对比 拿到返回值 数据结构如下 之前写法 const clickedItem routeList.find(item > item.key current) // current是当前页 用reduce遍历数组返回最后一个值 const clickedItem routeList.reduce((lastIte…...
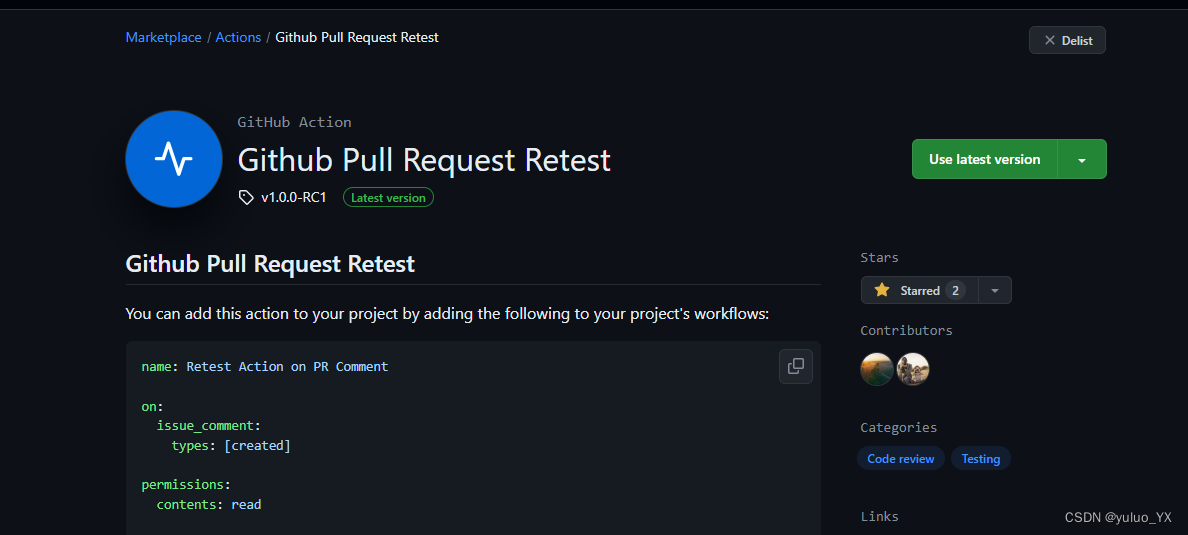
Github Action Bot 开发教程
Github Action Bot 开发教程 在使用 Github 时,你可能在一些著名的开源项目,例如 Kubernetes,Istio 中看到如下的一些评论: /lgtm /retest /area bug /assign xxxx ...等等,诸如此类的一些功能性评论。在这些评论出现…...
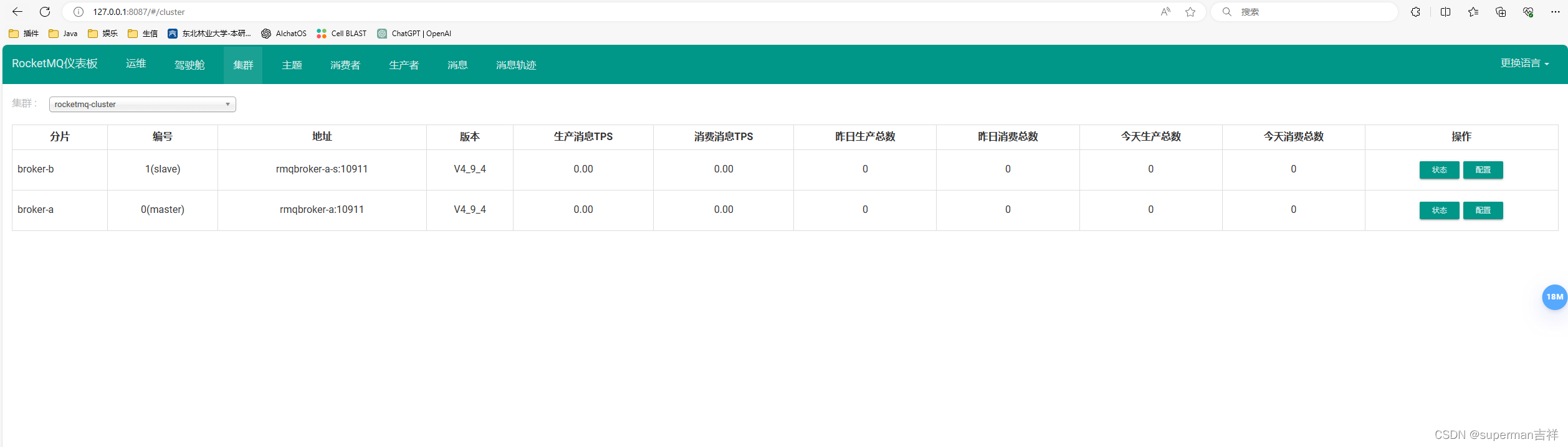
使用docker创建rocketMQ主从结构,使用
1、 创建目录 mkdir -p /docker/rocketmq/logs/nameserver-a mkdir -p /docker/rocketmq/logs/nameserver-b mkdir -p /docker/rocketmq/logs/broker-a mkdir -p /docker/rocketmq/logs/broker-b mkdir -p /docker/rocketmq/store/broker-a mkdir -p /docker/rocketmq/store/b…...

一次完整的 http 请求是怎样的?
一次完整的 http 请求是怎样的? 💖The Begin💖点点关注,收藏不迷路💖 域名解析 --> 发起 TCP 的 3 次握手 --> 建立 TCP 连接后发起 http 请求 --> 服务器响应 http 请求,浏览器得到 html 代码 --…...
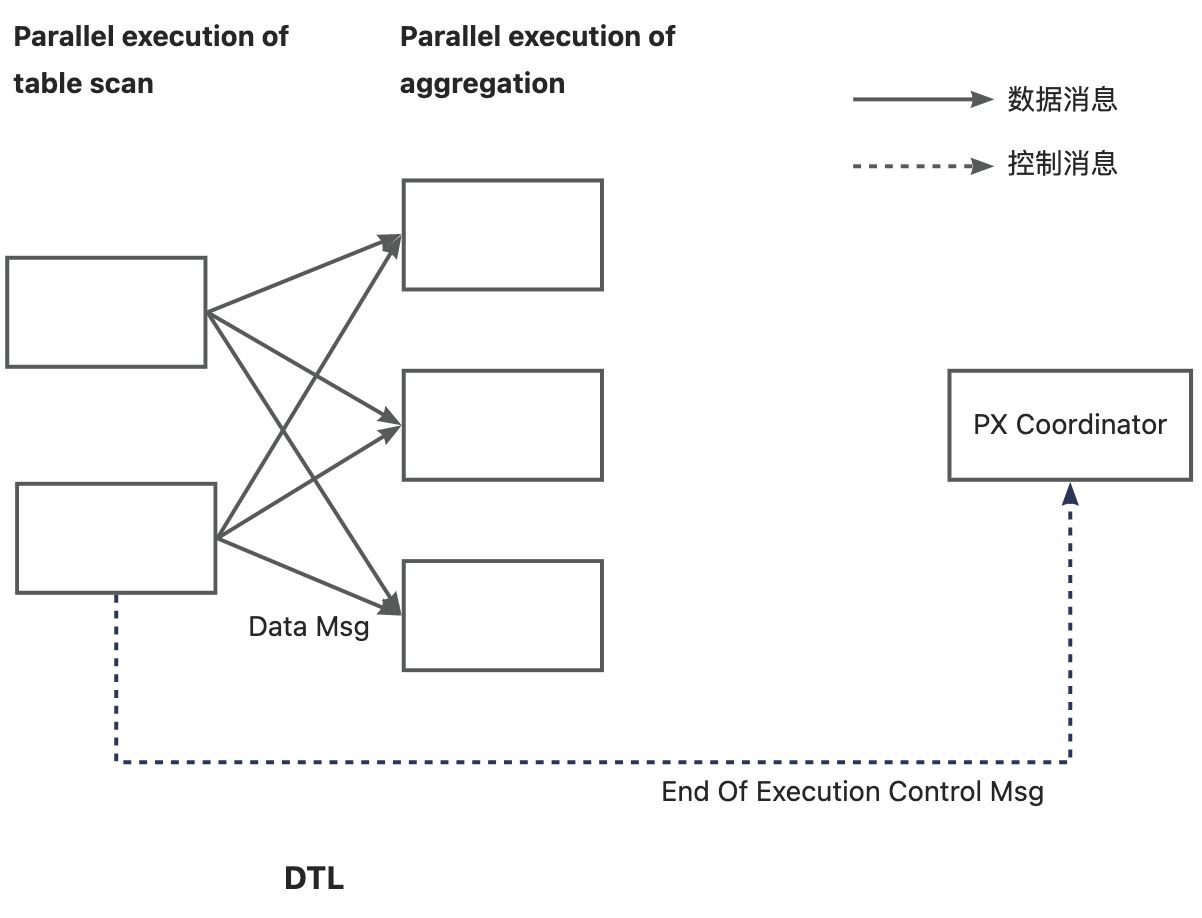
并行执行的概念—— 《OceanBase 并行执行》系列 一
From 产品经理: 这是一份姗姗来迟的关于OceanBase并行执行的系统化产品文档。 自2019年起,并行执行功能已被许多客户应用于多种场景之中,其重要性日益凸显。然而,遗憾的是,我们始终未能提供一份详尽的用户使用文档&…...

使用 ipdb 调试回调函数
一、问题概述 回调函数是指一个函数执行完后,调用另外一个函数的过程。 一般步骤是,回调函数作为参数传递给原始函数,原始函数执行完自己的逻辑后,自动调用回调函数并将自己的执行结果作为参数传递给回调函数。 根据不同的用法&a…...
)
介绍一下mybatis的基本配置(mybatis-config.xml)
src/main/resources/mybatis-config.xml 这句代码,是XML的声明,它指定了,XML的版本 和 编码方式 <?xml version"1.0" encoding"UTF-8" ?>这句代码,声明了XML文档类型,它告诉解析器&#x…...
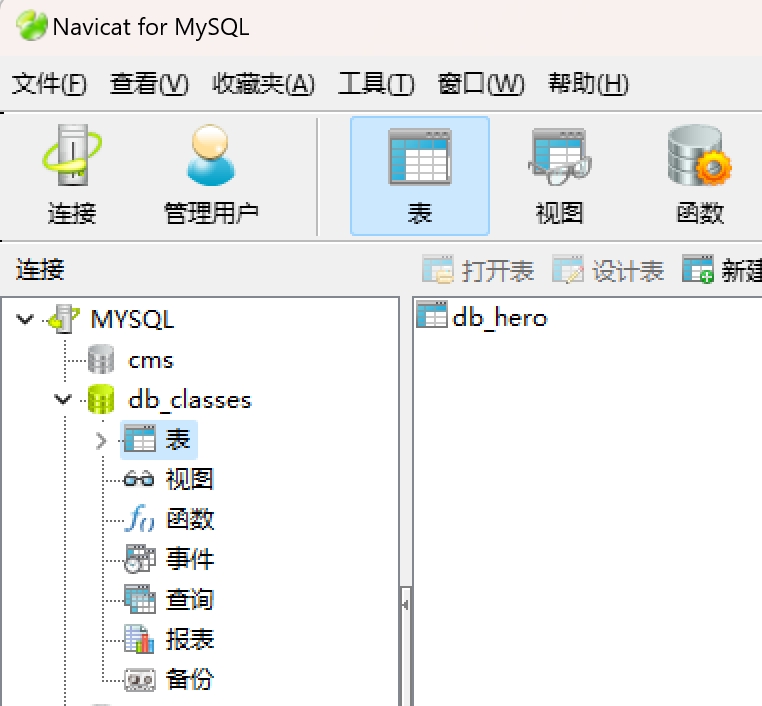
【MySQL】第一次作业
【MySQL】第一次作业 1、在官网下载安装包2、解压安装包,创建一个dev_soft文件夹,解压到里面。3、创建一个数据库db_classes4、创建一行表db_hero5、将四大名著中的常见人物插入这个英雄表 写一篇博客,在window系统安装MySQL将本机的MySQL一定…...

10个免费视频素材网站,剪辑师们赶紧收藏!
剪辑师们不知道去哪里找免费视频素材,就上这10个网站,免费下载部分还可商用,赶紧收藏起来! 1、菜鸟图库 https://www.sucai999.com/video.html?vNTYwNDUx 菜鸟图库虽然是个设计素材网站,但除了设计类素材之外还有很多…...

【毕业设计】基于SSM的运动用品商城的设计与实现
1.项目介绍 在这个日益数字化和信息化的时代,随着人们购物习惯的转变,传统的实体商店已经无法满足人们日益增长的在线购物需求。因此,基于SSM(Spring Spring MVC MyBatis)框架的运动用品商城项目应运而生࿰…...
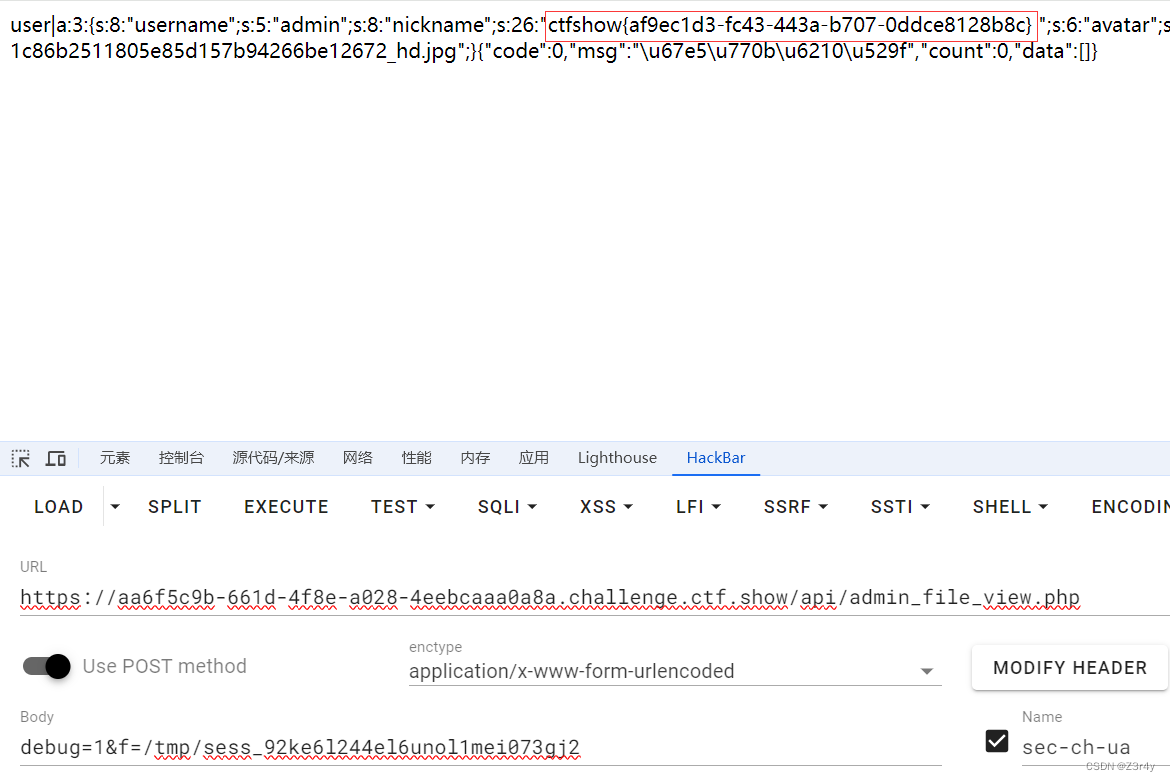
【Web】CTFSHOW 中期测评刷题记录(1)
目录 web486 web487 web488 web489 web490 web491 web492 web493 web494 web495 web496 web497 web498 web499 web500 web501 web502 web503 web505 web506 web507 web508 web509 web510 web486 扫目录 初始界面尝试文件包含index.php&am…...
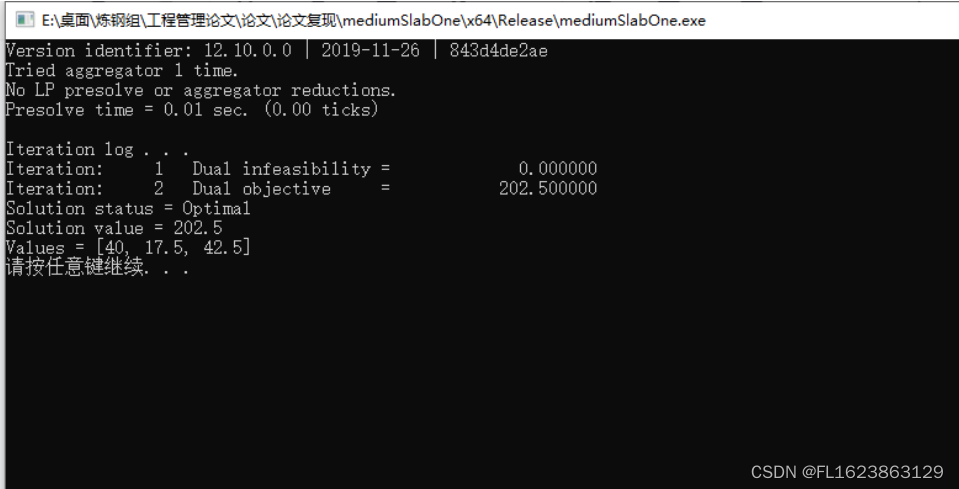
vs配置cplex12.10
1.创建c空项目 2.修改运行环境 为release以及x64 3.创建cpp文件 4.鼠标右键点击项目中的属性 5.点击c/c,点击第一项常规,配置附加库目录 5.添加文件索引,主要用于把路径导进来 6.这一步要添加的目录与你安装的cplex的目录有关系 F:\program…...
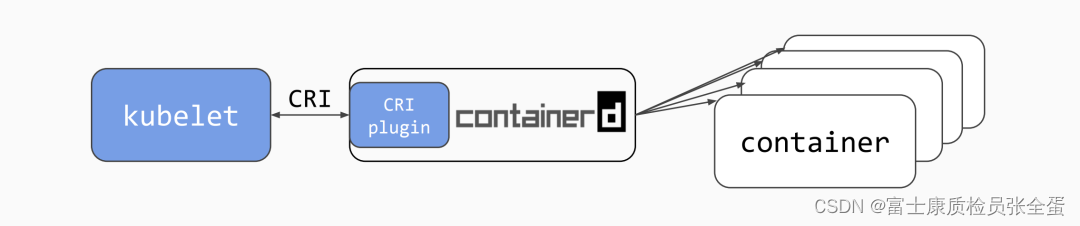
Kubernetes 弃用Docker后 Kubelet切换到Containerd
containerd 是一个高级容器运行时,又名 容器管理器。简单来说,它是一个守护进程,在单个主机上管理完整的容器生命周期:创建、启动、停止容器、拉取和存储镜像、配置挂载、网络等。 containerd 旨在轻松嵌入到更大的系统中。Docke…...

函数模板含有多个模板参数
如果一个模板接受多个参数,用逗号分隔参数。 使用时必要情况下需要主动传入模板参数。 #include <iostream> #include <vector>/* Compute the greatest common divisor of two integers, using Euclids algorithm. */ template<class T, class U&g…...

Sprd Android 13 增加系统属性判断当前有无 OTG U盘插入,App 读取系统属性
添加系统属性,通过监听插拔广播判断当前有无OTG U盘插入 --- a/frameworks/base/services/core/java/com/android/server/policy/PhoneWindowManager.java +++ b/frameworks/base/services/core/java/com/android/server/policy/PhoneWindowManager.java @@ -246,6 +246,7 @@ …...
第11章 数据库技术(第一部分)
一、数据库技术术语 (一)术语 1、数据 数据描述事物的符号描述一个对象所用的标识,可以文字、图形、图像、语言等等 2、信息 现实世界对事物状态变化的反馈。可感知、可存储、可加工、可再生。数据是信息的表现形式和载体,信…...

【亲测免费】【免费下载】 探索视觉新边界:RexVision视觉框架深度解析
探索视觉新边界:RexVision视觉框架深度解析 【下载地址】RexVision视觉框架下载仓库 本仓库提供了一个名为“RexVision视觉框架”的资源文件下载。该框架是一个视觉处理相关的工具或库,用户只需将文件放置在D盘的根目录下即可进行编译和使用 项目地址:…...

【免费下载】 探索SFP模块的奥秘:SFP-I2C工具推荐
探索SFP模块的奥秘:SFP-I2C工具推荐 项目介绍 在现代网络通信中,SFP(Small Form-factor Pluggable)模块扮演着至关重要的角色。这些模块通过I2C接口提供了丰富的信息,包括制造商、功能支持以及诊断数据等。然而&#x…...

51c自动驾驶~合集57
我自己的原文哦~ https://blog.51cto.com/whaosoft/13960249 #端到端自动驾驶算法实现原理 1从传感器数据到控制策略的端到端方法 端到端自动驾驶基本流程: (1)子任务模型被更大规模的神经网络模型取代,最终即为端到端神经网络模型; (2)…...

第 12 篇:W55RP20-EVB-Pico MicroPython 实战:MQTT 协议基础通信验证
本文为 WIZnet W55RP20 芯片 MicroPython教程第 12 篇,基于官方最新固件编写,代码均经过实际验证,可直接烧录运行。 版权声明:本文为 WIZnet 官方原创技术文章,转载请注明出处。 前言 上一篇实战教程,我们…...

convoai-cli:命令行集成AI对话,提升开发效率的自动化利器
1. 项目概述:一个面向对话式AI的命令行利器如果你和我一样,经常需要和各类大语言模型(LLM)打交道,无论是调试一个提示词(Prompt),还是批量处理一堆文档,又或者只是想快速…...

【SysBench】从零到一:在Linux上部署sysbench-1.20进行数据库压测
1. 为什么你需要sysbench? 如果你正在使用MySQL或PostgreSQL这类数据库,迟早会遇到一个灵魂拷问:我的数据库到底能扛住多少并发请求?这时候sysbench就该登场了。这个工具就像数据库的"体能测试仪",能模拟真实…...

监控页面明明越来越多,为什么值班时还是看不清问题?
很多团队把监控系统搭起来以后,都会经历一个很典型的落差。 平时看,采集对象越来越全,图表越来越多,主机、数据库、中间件、网络也都接进来了;可一到值班现场,业务一说“接口变慢了”,排障同学打…...

BG3 Mod Manager终极指南:如何轻松管理《博德之门3》模组
BG3 Mod Manager终极指南:如何轻松管理《博德之门3》模组 【免费下载链接】BG3ModManager A mod manager for Baldurs Gate 3. This is the only official source! 项目地址: https://gitcode.com/gh_mirrors/bg/BG3ModManager 你是否曾经因为《博德之门3》模…...
)
HYCONTROL MICROFLEX-DB超声波液位计实操详解(参数+工况+故障排查)
在工业液位测量中,腐蚀性介质、罐内干扰、泡沫水汽、后期维护量大一直是现场普遍痛点,很多中小型储罐、水池、反应罐都会纠结性价比高、调试简单、稳定性强的超声波液位计。今天给大家详细拆解一款进口紧凑型液位变送器:英国HYCONTROL海康MIC…...
)
Elasticsearch 7.6.1 实战:从零构建招聘信息搜索服务(索引、数据与分页)
1. 从零搭建招聘搜索服务:为什么选择Elasticsearch? 最近在帮朋友改造招聘网站的后台搜索功能时,我果断推荐了Elasticsearch 7.6.1。这个版本在稳定性和功能完整性上达到了很好的平衡,特别适合中小型企业的搜索场景。相比传统数据…...