一些零碎小知识
函数递归复习
#define 的头文件包含
#define定义标识符常量 等define其他用法
斐波那契数列 函数栈帧
青蛙跳台问题 汉诺塔问题
字符“0”与0的计算 “0”-“0”=0;
最后一次作业题一道
素数
随机数 strand timer rand 水仙花数 变种随鲜花
斐波那契数列
二分折半 扫雷 最大公约数 矩阵
递归函数 调试的博客
源码的隐藏 静态库
源码反码补码 二进制
操作符
数组练习
练习一:多个字符从两端移动,向中间汇聚。
练习二:二分查找/折半查找
scanf != EOF的复习使用
矩阵 作业题两道
相关文章:

一些零碎小知识
函数递归复习 #define 的头文件包含 #define定义标识符常量 等define其他用法 斐波那契数列 函数栈帧 青蛙跳台问题 汉诺塔问题 字符“0”与0的计算 “0”-“0”0; 最后一次作业题一道 素数 随机数 strand timer rand 水仙花数 变种随鲜花 斐波那契数…...
2.2 Java全栈开发前端+后端(全栈工程师进阶之路)-前端框架VUE3-基础-Vue基本语法
文本渲染指令 文本渲染指令-v-html与v-text Vue使用了基于HTML的模板语法,允许开发者声明式地将DOM绑定至底层Vue实例的数据。所有Vue的模板都是 合法的HTML,所以能被遵循规范的浏览器和HTML解析器解析。 在前面,我们一直使用的是字符串插…...
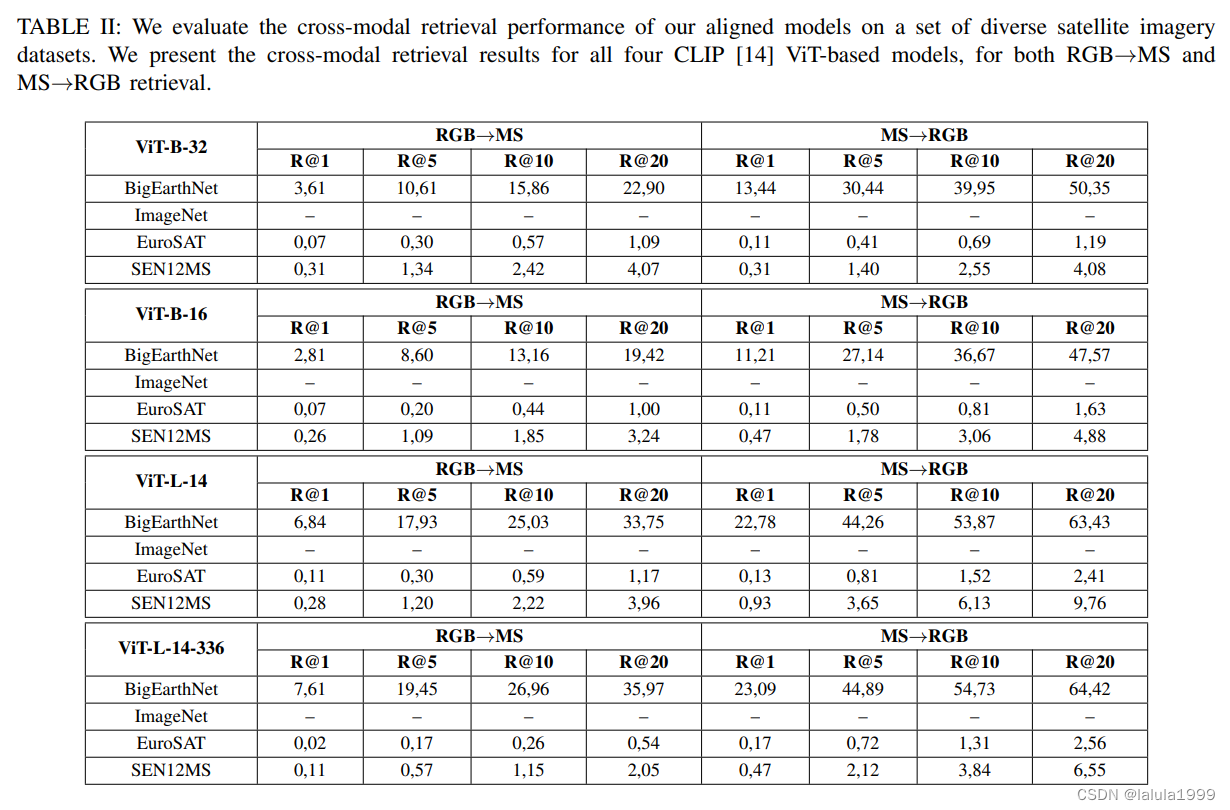
(Arxiv,2024)Mind the Modality Gap:通过跨模态对齐建立遥感视觉语言模型
文章目录 相关资料摘要引言相关工作对比语言图像预训练遥感域专用 CLIP 模型遥感中的多模态 CLIP 启发模型 方法模型算法输入阶段:输出阶段:步骤说明: 第一阶段:通过权重插值修补CLIP将遥感图像模态与自然图像和文本对齐 实验 相关…...
)
区块链 | 一文了解 NFT 的生态系统(上)
🐶原文: Understanding Security Issues in the NFT Ecosystem 🐶写在前面: 本博客只摘取了原论文的第二、三节。 技术背景知识 在本节中,我们将介绍以太坊生态系统的构建模块,重点关注「NFT,…...

为什么centos官方版不支持arm架构?
为什么centos官方版不支持arm架构? 1、资源限制:CentOS是由社区维护的开源操作系统,其开发和维护需要大量的人力和物力资源。由于ARM架构的设备相对较少,社区资源有限,因此官方版CentOS选择集中精力在x86架构上进行开发…...
)
awk小尝试2(随手记)
文章目录 需求1解法 需求2解法(3种-grep/sed/awk) 需求1 使用hostname -I创建文件名 echo hostname -I.txt 10.0.0.124 .txt # 需要注意,这里的.txt前有一个空格,需要去掉,不然就是两个文件名解法 echo hostname -I…...
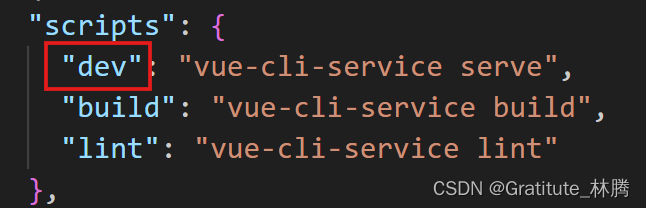
Vue的项目启动指令分析
通过Vue CLI脚手架创建的项目,默认的启动项目方式是 npm run serve 这里的serve是可以修改的。 在创建的项目目录中,找到package.json 双击打开,找到scripts部分 在scripts部分,有一个"serve"键值对,这里的…...
年轻人刮疯了,刮刮乐断货了
年轻人刮疯了 刮刮乐缺货了。 00后彩票店老板陆诗等得有点着急。她的福彩店开在深圳,今年4月才开门营业,但从开业到今天,刮刮乐总共就来了一回货——开业时发的20本。 那之后,刮刮乐就彻底断供了。原本,陆诗想把刮刮…...

25 JavaScript学习:var let const
JavaScript全局变量 JavaScript中全局变量存在多种情况和定义方式,下面详细解释并提供相应的举例: 使用var关键字声明的全局变量: var globalVar "我是全局变量";未使用var关键字声明的变量会成为全局变量(不推荐使用&…...

docker部署的nacos2.2x开启鉴权功能
注意在2.2.0版本之后如果不开启鉴权,那么默认不需要登录就可以访问 所以我们需要手动开启鉴权,nacos启动好以后来到容器内部修改 docker exec -it nacos /bin/shvim conf/application.properties在第34行下面添加 nacos.core.auth.enabledtrue nacos.cor…...

【数据结构与算法】之五道链表进阶面试题详解!
目录 1、链表的回文结构 2、相交链表 3、随机链表的复制 4、环形链表 5、环形链表(||) 6、完结散花 个人主页:秋风起,再归来~ 数据结构与算法 个人格言:悟已往之不谏,知…...

vue2实现生成二维码和复制保存图片功能(复制的同时会给图片加文字)
<template><divstyle"display: flex;justify-content: center;align-items: center;width: 100vw;height: 100vh;"><div><!-- 生成二维码按钮和输入二维码的输入框 --><input v-model"url" placeholder"输入链接" ty…...

Redis之字符串类型深入之SDS底层结构
作为一名程序员不可能不知道redis 知道redis不可能不知道redis的字符串 如果你真的熟悉redis不能不知道sds, 我们探究一下redis字符串的底层结构 sds翻译过来就是动态扩容(Simple Dynamic String)、先看一下最早版本redis的sds结构体 struct sdshdr{int len; //记录数组中…...

Cesium 3dTileset 支持 uv 和 纹理贴图
原理: 使用自定义shader实现uv自动计算 贴图效果: uv效果:...

C++可变参数模板中的省略号
看可变参数模板代码时常会遇到省略号的使用,这类奇特的“...”出现位置还不固定,容易引起困惑。C最近一直不用都快废了,在此想对省略号的使用做个简单归纳以提醒自己。可变参数模板以两种方式使用省略号。 在参数名称的左侧,表示“…...

uni-ui 使用uni-icons有些图标显示不出来,如down,up图标
问题描述 我使用的是uni创建时勾选的uni-ui模板,一次偶然机会发现down图标显示不出,left,right等其他图标又可以。 最后发现使用uni-icons不是最新版本导致的,使用模板生成的icons是1.3.5版本,我在插件市场找到的是2.0…...

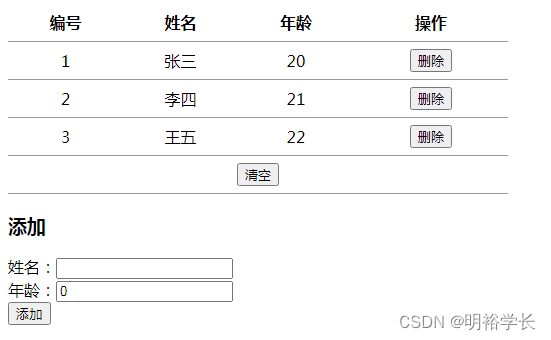
动态增删表格
期望目标:实现一个能通过按钮来动态增加表格栏,每次能添加一行,每行末尾有一个删减按钮。 <el-button type"text" class"primary"click"addMember()">添加</el-button> <el-table:data"m…...
Java-(乘法表之后)增强for循环
这里我们先做个了解,之后我会在数组中进行详细介绍Java5引入了一种主要用于数组或集合的增强型for循环Java增强型for循环语法格式如下 For(声明语句:表达式){ //代码语句 } 声明语句:声明新的局部变量,该变量的类型…...
Celery(分布式任务队列)入门学习笔记
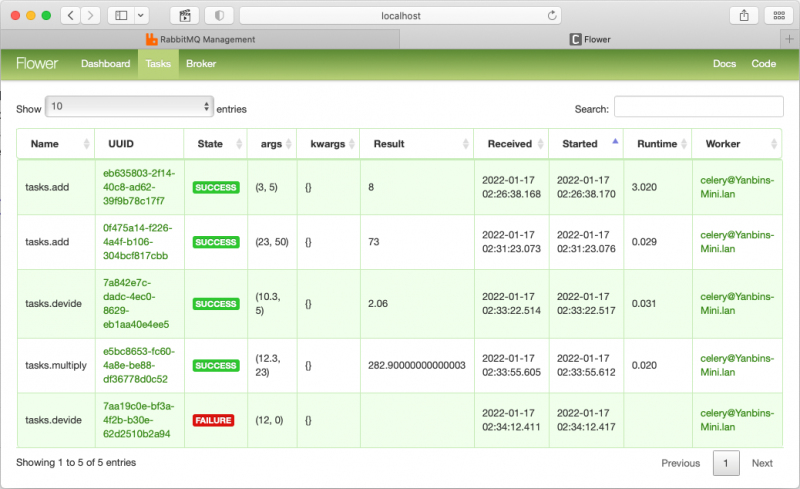
Celery 的简单介绍 用 Celery 官方的介绍:它是一个分布式任务队列; 简单,灵活,可靠的处理大量消息的分布式系统; 它专注于实时处理,并支持任务调度。 Celery 如果使用 RabbitMQ 作为消息系统的话,整个应用体系就是下…...

【网络】tcp协议如何保证可靠性
TCP(Transmission Control Protocol)是一种面向连接的、可靠的传输层协议,为网络通信提供了可靠性和连接稳定性。本文将详细介绍 TCP 协议如何保证数据的可靠传输和连接的稳定性,并分析其优缺点。 可靠性保证 序号和确认机制&…...

CH340系列Linux驱动编译与内核适配实战
1. CH340驱动在Linux环境下的特殊挑战 第一次在Ubuntu 22.04上折腾CH340驱动时,我遇到了一个让人哭笑不得的情况——官方提供的驱动源码居然编译不过!这让我意识到,随着Linux内核版本的快速迭代,很多老牌硬件设备的驱动都需要手动…...
)
从零训练专属风格模板:Midjourney V6.2风格参考+ControlNet协同工作流(含Stable Diffusion双向映射对照表)
更多请点击: https://intelliparadigm.com 第一章:Midjourney风格参考功能详解 Midjourney 的风格参考(Style Reference,简称 --sref)是一项强大的图像一致性控制机制,允许用户将一张参考图的视觉风格&…...

3步解锁百度网盘SVIP极速下载:告别限速困扰的完整指南
3步解锁百度网盘SVIP极速下载:告别限速困扰的完整指南 【免费下载链接】BaiduNetdiskPlugin-macOS For macOS.百度网盘 破解SVIP、下载速度限制~ 项目地址: https://gitcode.com/gh_mirrors/ba/BaiduNetdiskPlugin-macOS 还在为百度网盘那蜗牛般的下载速度而…...

如何提升co项目代码质量:ESLint规则与异步检查完整指南
如何提升co项目代码质量:ESLint规则与异步检查完整指南 【免费下载链接】co The ultimate generator based flow-control goodness for nodejs (supports thunks, promises, etc) 项目地址: https://gitcode.com/gh_mirrors/co/co co作为Node.js生态中基于生…...

Genesys Cloud技能库:模块化对话机器人开发实战指南
1. 项目概述:一个为Genesys Cloud平台量身定制的技能库如果你正在或计划使用Genesys Cloud来构建你的客户服务体验,并且厌倦了从零开始编写每一个对话流程,那么这个名为“genesys-cloud-skills”的开源项目,绝对值得你花时间深入了…...

量子金融强化学习:FinRL-Library实现AI量化交易的终极指南
量子金融强化学习:FinRL-Library实现AI量化交易的终极指南 【免费下载链接】FinRL FinRL: Financial Reinforcement Learning. 🔥 项目地址: https://gitcode.com/gh_mirrors/fi/FinRL-Library FinRL-Library作为金融强化学习领域的开源框架&…...

构建Android代码编辑器的终极指南:Acode从源码到APK的完整流程
构建Android代码编辑器的终极指南:Acode从源码到APK的完整流程 【免费下载链接】Acode Acode - powerful text/code editor for android 项目地址: https://gitcode.com/gh_mirrors/ac/Acode 在移动开发日益普及的今天,拥有一款功能强大的Android…...
Zotero PDF Translate:打破语言壁垒,让外文文献阅读更高效 [特殊字符]
Zotero PDF Translate:打破语言壁垒,让外文文献阅读更高效 🚀 【免费下载链接】zotero-pdf-translate Translate PDF, EPub, webpage, metadata, annotations, notes to the target language. Support 20 translate services. 项目地址: ht…...

五分钟用Python为嵌入式应用接入Taotoken大模型服务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 五分钟用Python为嵌入式应用接入Taotoken大模型服务 为嵌入式设备或物联网项目添加智能对话能力,可以极大地提升产品的…...

5个高效处理PDF的Windows命令行工具:Poppler完整解决方案
5个高效处理PDF的Windows命令行工具:Poppler完整解决方案 【免费下载链接】poppler-windows Download Poppler binaries packaged for Windows with dependencies 项目地址: https://gitcode.com/gh_mirrors/po/poppler-windows 在Windows平台上处理PDF文档时…...