【1】STM32·FreeRTOS·新建工程模板【一步到位】
目录
一、获取FreeRTOS源码
二、FreeRTOS源码简介
2.1、FreeRTOS源码文件内容
2.2、FreeRTOS内核
2.3、Source文件夹
2.4、portable文件夹
三、FreeRTOS手把手移植
3.1、FreeRTOS移植准备
3.2、FreeRTOS移植步骤
3.2.1、将 FreeRTOS 源码添加至基础工程、头文件路径等
3.2.2、添加 FreeRTOSConfig.h 配置文件
3.2.3、修改 SYSTEM 文件中的 sys.c、delay.c、usart.c
3.2.4、修改 Systick 中断、SVC 中断、PendSV 中断
3.2.5、验证移植是否成功
一、获取FreeRTOS源码
方法一:FreeRTOS 官网:freertos.orgfreertos.orgfreertos.org
方法二:正点原子官网获取,软件资料 —> FreeRTOS 学习资料
二、FreeRTOS源码简介
2.1、FreeRTOS源码文件内容
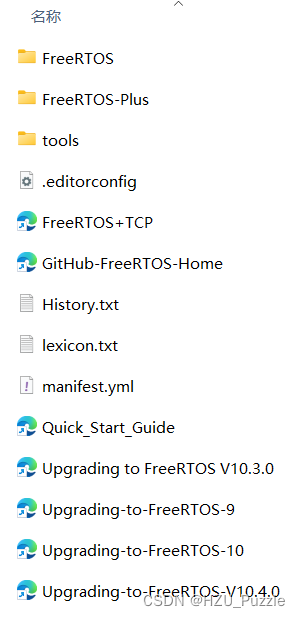
| 名称 | 描述 |
| FreeRTOS | FreeRTOS 内核 |
| FreeRTOS-Plus | FreeRTOS 组件 |
| tools | 工具 |
| GitHub-FreeRTOS-Home | FreeRTOS 的 GitHub 仓库链接 |
| Quick_Start_Guide | 快速入门指南官方文档链接 |
| Upgrading to FreeRTOS-xxx | 升级到指定 FreeRTOS 版本官方文档链接 |
| History.txt | FreeRTOS 历史更新记录 |
| 其他 | 其他 |
2.2、FreeRTOS内核
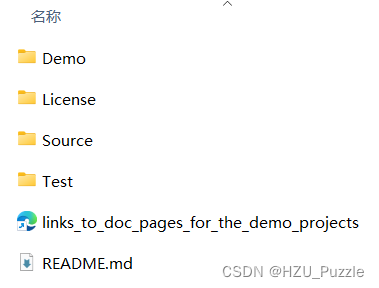
| 名称 | 描述 |
| Demo | FreeRTOS 演示例程 |
| License | FreeRTOS 相关许可 |
| Source | FreeRTOS 源码 |
| Test | 公用以及移植层测试代码 |
2.3、Source文件夹

| 名称 | 描述 |
| include | 包含了 FreeRTOS 的头文件 |
| portable | 包含了 FreeRTOS 的移植文件 |
| croutine.c | 协程相关文件 |
| event_groups.c | 事件相关文件 |
| list.c | 列表相关文件 |
| queue.c | 队列相关文件 |
| stream_buffer.c | 流式缓冲区相关文件 |
| tasks.c | 任务相关文件 |
| timers.c | 软件定时器相关文件 |
2.4、portable文件夹
FreeRTOS 操作系统归根到底是一个软件层面的东西,那 FreeRTOS 是如何跟硬件联系在一起的呢?
portable 文件夹里面的东西就是连接桥梁,由于我们使用 MDK 开发,因此这里只重点介绍其中的部分移植文件
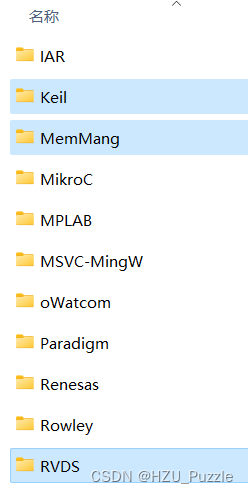
| 名称 | 描述 |
| Keil | 指向 RVDS 文件夹 |
| RVDS | 不同内核芯片的移植文件 |
| MemMang | 内存管理文件 |
三、FreeRTOS手把手移植
3.1、FreeRTOS移植准备
有了 FreeRTOS 源码之后,还需要一个 HAL 库版本的实验工程作为基础工程进行 FreeRTOS 的移植
这里以正点原子的 HAL 库版本内存管理实验作为基础工程

3.2、FreeRTOS移植步骤
3.2.1、将 FreeRTOS 源码添加至基础工程、头文件路径等
在Middlewares文件夹中新建FreeRTOS文件夹

将Source文件夹中的FreeRTOS源码复制进去,并删除非源码文件.gitmodules

打开portable文件夹,保留Keil、MemMang、RVDS文件夹,其余删除

打开项目工程,点击分组管理图标,新建分组名为Middlewares/FreeRTOS_CORE、Middlewares/FreeRTOS_PORT,点击OK
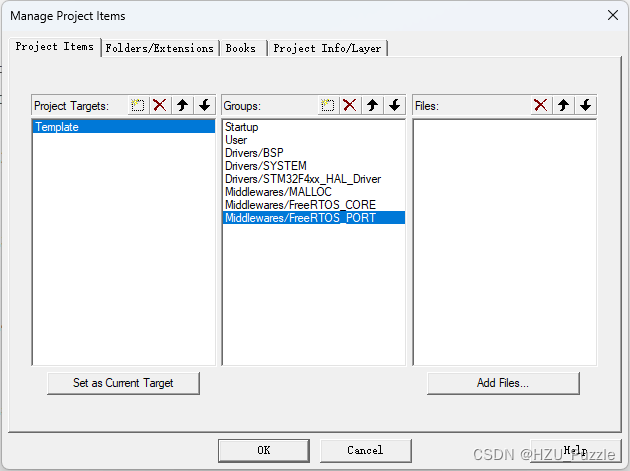
选择Middlewares/FreeRTOS_CORE分组,点击 Add Files,回到FreeRTOS目录,添加当前目录下的所有.c文件,点击 Add

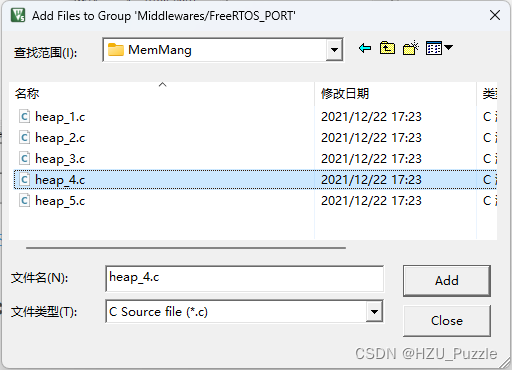
选择Middlewares/FreeRTOS_PORT分组,点击 Add Files,回到FreeRTOS目录,打开portable/MemMang文件夹,选择heap_4.c内存管理算法,点击 Add
回到portable目录,打开RVDS文件夹,根据自己的芯片选择对应的连接桥梁,本人使用的是STM32F407的开发板,对应选择ARM_CM4F文件夹中的port.c文件,点击 Add
| 开发板芯片 | port.c 所在文件夹 |
| STM32F1 | ARM_CM3 |
| STM32F4 | ARM_CM4F |
| STM32F7 | ARM_CM7 |
| STM32H7 | ARM_CM7 |

完成设置后的分组

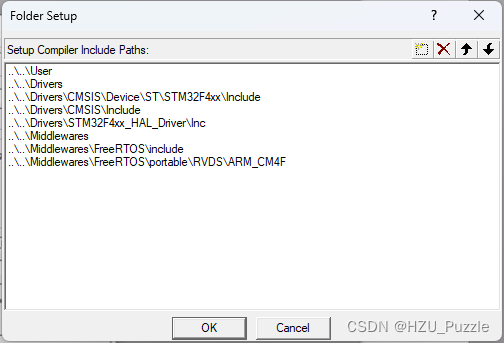
打开魔术棒,点击C/C++,设置头文件包含路径如下图
3.2.2、添加 FreeRTOSConfig.h 配置文件
FreeRTOSConfig.h 是FreeRTOS 操作系统的配置文件,FreeRTOS 操作系统是可裁剪的,用户可以根据需求对 FreeRTOS 进行裁剪,裁剪掉不需要用到的 FreeRTOS 功能,以此来节约 MCU 中寸土寸金的内存资源
FreeRTOSConfig.h 文件的获取途径有三种
1、用户自行编写(不建议新手使用)
2、在 FreeRTOS 内核文件中的 Demo 文件夹包含了 FreeRTOS 官方提供的演示工程,在这些演示工程中就包含了每个演示工程对应的 FreeRTOSConfig.h 文件
3、在正点原子 FreeRTOS 移植实验中复制
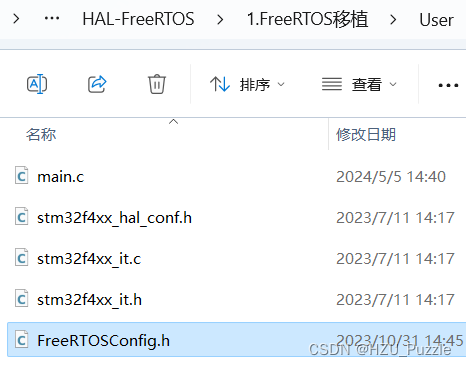
将获取到的 FreeRTOSConfig.h 文件放在 User 文件夹下
3.2.3、修改 SYSTEM 文件中的 sys.c、delay.c、usart.c
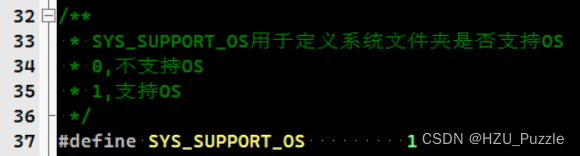
打开 sys.h 文件,将 SYS_SUPPORT_OS 宏定义修改为 1,支持os
打开 usart.c 文件,在中断服务函数中删除 OSIntEnter() 和 OSIntExit() 函数(在 μC/OS中 会使用到,FreeRTOS 中不会)
删除前
/*** @brief 串口1中断服务函数* @param 无* @retval 无*/
void USART_UX_IRQHandler(void)
{
#if SYS_SUPPORT_OS /* 使用OS */OSIntEnter();
#endifHAL_UART_IRQHandler(&g_uart1_handle); /* 调用HAL库中断处理公用函数 */#if SYS_SUPPORT_OS /* 使用OS */OSIntExit();
#endif
}删除后
/*** @brief 串口1中断服务函数* @param 无* @retval 无*/
void USART_UX_IRQHandler(void)
{ HAL_UART_IRQHandler(&g_uart1_handle); /* 调用HAL库中断处理公用函数 */
}删除以下代码(在 μC/OS中 会使用到,FreeRTOS 中不会)

打开 delay.c 文件,删除以下代码(在 μC/OS中 会使用到,FreeRTOS 中不会)
/* 定义g_fac_ms变量, 表示ms延时的倍乘数, 代表每个节拍的ms数, (仅在使能os的时候,需要用到) */
static uint16_t g_fac_ms = 0;/** 当delay_us/delay_ms需要支持OS的时候需要三个与OS相关的宏定义和函数来支持* 首先是3个宏定义:* delay_osrunning :用于表示OS当前是否正在运行,以决定是否可以使用相关函数* delay_ostickspersec:用于表示OS设定的时钟节拍,delay_init将根据这个参数来初始化systick* delay_osintnesting :用于表示OS中断嵌套级别,因为中断里面不可以调度,delay_ms使用该参数来决定如何运行* 然后是3个函数:* delay_osschedlock :用于锁定OS任务调度,禁止调度* delay_osschedunlock:用于解锁OS任务调度,重新开启调度* delay_ostimedly :用于OS延时,可以引起任务调度.** 本例程仅作UCOSII的支持,其他OS,请自行参考着移植*//* 支持UCOSII */
#define delay_osrunning OSRunning /* OS是否运行标记,0,不运行;1,在运行 */
#define delay_ostickspersec OS_TICKS_PER_SEC /* OS时钟节拍,即每秒调度次数 */
#define delay_osintnesting OSIntNesting /* 中断嵌套级别,即中断嵌套次数 *//*** @brief us级延时时,关闭任务调度(防止打断us级延迟)* @param 无* @retval 无*/
void delay_osschedlock(void)
{OSSchedLock(); /* UCOSII的方式,禁止调度,防止打断us延时 */
}/*** @brief us级延时时,恢复任务调度* @param 无* @retval 无*/
void delay_osschedunlock(void)
{OSSchedUnlock(); /* UCOSII的方式,恢复调度 */
}/*** @brief us级延时时,恢复任务调度* @param ticks: 延时的节拍数* @retval 无*/
void delay_ostimedly(uint32_t ticks)
{OSTimeDly(ticks); /* UCOSII延时 */
}在SysTick_Handler函数前添加extern void xPortSysTickHandler(void);代码,用于处理 FreeRTOS 系统时钟节拍
extern void xPortSysTickHandler(void);/*** @brief systick中断服务函数,使用OS时用到* @param ticks : 延时的节拍数 * @retval 无*/
void SysTick_Handler(void)
{/* OS 开始跑了,才执行正常的调度处理 */if (delay_osrunning == OS_TRUE){/* 调用 uC/OS-II 的 SysTick 中断服务函数 */OS_CPU_SysTickHandler();}HAL_IncTick();
}修改SysTick_Handler函数如下
/*** @brief systick中断服务函数,使用OS时用到* @param ticks : 延时的节拍数 * @retval 无*/
void SysTick_Handler(void)
{HAL_IncTick();/* OS 开始跑了,才执行正常的调度处理 */if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED){xPortSysTickHandler();}
}修改delay_init函数
修改前
/*** @brief 初始化延迟函数* @param sysclk: 系统时钟频率, 即CPU频率(rcc_c_ck), 168MHz* @retval 无*/
void delay_init(uint16_t sysclk)
{
#if SYS_SUPPORT_OS /* 如果需要支持OS */uint32_t reload;
#endifg_fac_us = sysclk; /* 由于在HAL_Init中已对systick做了配置,所以这里无需重新配置 */
#if SYS_SUPPORT_OS /* 如果需要支持OS. */reload = sysclk; /* 每秒钟的计数次数 单位为M */reload *= 1000000 / delay_ostickspersec; /* 根据delay_ostickspersec设定溢出时间,reload为24位* 寄存器,最大值:16777216,在168M下,约合0.09986s左右*/g_fac_ms = 1000 / delay_ostickspersec; /* 代表OS可以延时的最少单位 */SysTick->CTRL |= 1 << 1; /* 开启SYSTICK中断 */SysTick->LOAD = reload; /* 每1/delay_ostickspersec秒中断一次 */SysTick->CTRL |= 1 << 0; /* 开启SYSTICK */
#endif
}修改后
/*** @brief 初始化延迟函数* @param sysclk: 系统时钟频率, 即CPU频率(rcc_c_ck), 168MHz* @retval 无*/
void delay_init(uint16_t sysclk)
{
#if SYS_SUPPORT_OS /* 如果需要支持OS */uint32_t reload;
#endifg_fac_us = sysclk; /* 由于在HAL_Init中已对systick做了配置,所以这里无需重新配置 */
#if SYS_SUPPORT_OS /* 如果需要支持OS. */reload = sysclk; /* 每秒钟的计数次数 单位为M */reload *= 1000000 / configTICK_RATE_HZ; /* 根据delay_ostickspersec设定溢出时间,reload为24位* 寄存器,最大值:16777216,在168M下,约合0.09986s左右*/SysTick->CTRL |= 1 << 1; /* 开启SYSTICK中断 */SysTick->LOAD = reload; /* 每1/delay_ostickspersec秒中断一次 */SysTick->CTRL |= 1 << 0; /* 开启SYSTICK */
#endif
}修改delay_us函数
修改前
/*** @brief 延时nus* @note 无论是否使用OS, 都是用时钟摘取法来做us延时* @param nus: 要延时的us数* @note nus取值范围: 0 ~ (2^32 / fac_us) (fac_us一般等于系统主频, 自行套入计算)* @retval 无*/
void delay_us(uint32_t nus)
{uint32_t ticks;uint32_t told, tnow, tcnt = 0;uint32_t reload = SysTick->LOAD; /* LOAD的值 */ticks = nus * g_fac_us; /* 需要的节拍数 */#if SYS_SUPPORT_OS /* 如果需要支持OS */delay_osschedlock(); /* 锁定 OS 的任务调度器 */
#endiftold = SysTick->VAL; /* 刚进入时的计数器值 */while (1){tnow = SysTick->VAL;if (tnow != told){if (tnow < told){tcnt += told - tnow; /* 这里注意一下SYSTICK是一个递减的计数器就可以了 */}else{tcnt += reload - tnow + told;}told = tnow;if (tcnt >= ticks) {break; /* 时间超过/等于要延迟的时间,则退出 */}}}#if SYS_SUPPORT_OS /* 如果需要支持OS */delay_osschedunlock(); /* 恢复 OS 的任务调度器 */
#endif }修改后
/*** @brief 延时nus* @note 无论是否使用OS, 都是用时钟摘取法来做us延时* @param nus: 要延时的us数* @note nus取值范围: 0 ~ (2^32 / fac_us) (fac_us一般等于系统主频, 自行套入计算)* @retval 无*/
void delay_us(uint32_t nus)
{uint32_t ticks;uint32_t told, tnow, tcnt = 0;uint32_t reload = SysTick->LOAD; /* LOAD的值 */ticks = nus * g_fac_us; /* 需要的节拍数 */told = SysTick->VAL; /* 刚进入时的计数器值 */while (1){tnow = SysTick->VAL;if (tnow != told){if (tnow < told){tcnt += told - tnow; /* 这里注意一下SYSTICK是一个递减的计数器就可以了 */}else{tcnt += reload - tnow + told;}told = tnow;if (tcnt >= ticks) {break; /* 时间超过/等于要延迟的时间,则退出 */}}}
}修改delay_ms函数
修改前
/*** @brief 延时nms* @param nms: 要延时的ms数 (0< nms <= (2^32 / fac_us / 1000))(fac_us一般等于系统主频, 自行套入计算)* @retval 无*/
void delay_ms(uint16_t nms)
{#if SYS_SUPPORT_OS /* 如果需要支持OS, 则根据情况调用os延时以释放CPU */if (delay_osrunning && delay_osintnesting == 0) /* 如果OS已经在跑了,并且不是在中断里面(中断里面不能任务调度) */{if (nms >= g_fac_ms) /* 延时的时间大于OS的最少时间周期 */{delay_ostimedly(nms / g_fac_ms); /* OS延时 */}nms %= g_fac_ms; /* OS已经无法提供这么小的延时了,采用普通方式延时 */}
#endifdelay_us((uint32_t)(nms * 1000)); /* 普通方式延时 */
}修改后
/*** @brief 延时nms* @param nms: 要延时的ms数 (0< nms <= (2^32 / fac_us / 1000))(fac_us一般等于系统主频, 自行套入计算)* @retval 无*/
void delay_ms(uint16_t nms)
{uint32_t i;for (i = 0; i < nms; ++i){delay_us(1000);}
}修改公共头文件
修改前
/* 添加公共头文件 ( ucos需要用到) */
#include "os.h"修改后
/* 添加公共头文件 (FreeRTOS 需要用到) */
#include "FreeRTOS.h"
#include "task.h"3.2.4、修改 Systick 中断、SVC 中断、PendSV 中断
打开stm32f4xx_it.c文件,引入sys.h头文件
采用宏定义的方式屏蔽Systick、SVC、PendSV函数的定义
/*** @brief This function handles SVCall exception.* @param None* @retval None*/
#if (!SYS_SUPPORT_OS)
void SVC_Handler(void)
{
}
#endif/*** @brief This function handles Debug Monitor exception.* @param None* @retval None*/
void DebugMon_Handler(void)
{
}/*** @brief This function handles PendSVC exception.* @param None* @retval None*/
#if (!SYS_SUPPORT_OS)
void PendSV_Handler(void)
{
}
#endif/*** @brief This function handles SysTick Handler.* @param None* @retval None*/
#if (!SYS_SUPPORT_OS)
void SysTick_Handler(void)
{HAL_IncTick();
}
#endif编译项目工程(报错不用管),打开 FreeRTOSConfig.h 文件,找到如下宏定义转跳到定义

将4U修改成4

3.2.5、验证移植是否成功
点击全编译
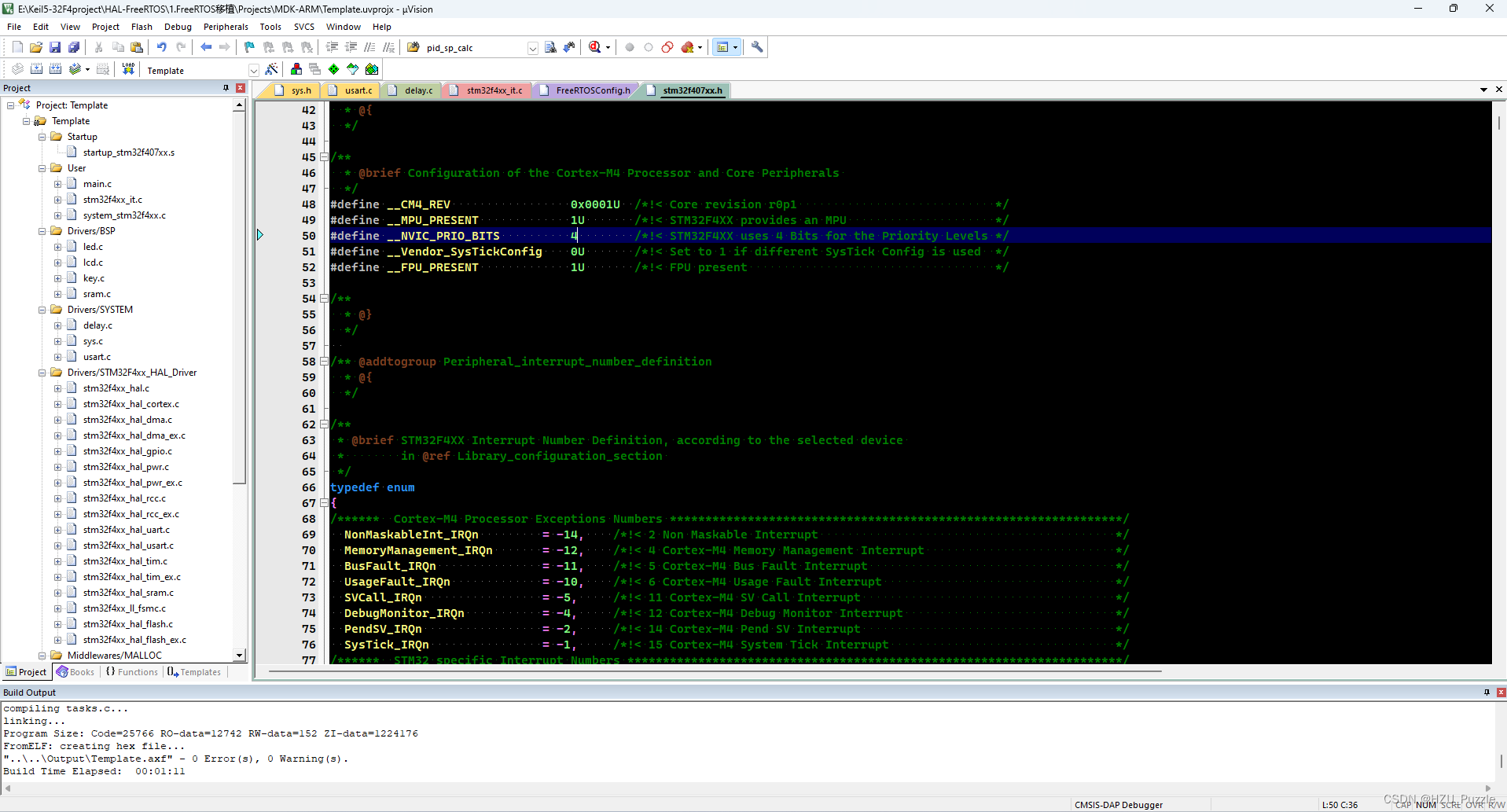
编译完成后显示零错误零警告,工程模板创建完毕!!!
相关文章:
【1】STM32·FreeRTOS·新建工程模板【一步到位】
目录 一、获取FreeRTOS源码 二、FreeRTOS源码简介 2.1、FreeRTOS源码文件内容 2.2、FreeRTOS内核 2.3、Source文件夹 2.4、portable文件夹 三、FreeRTOS手把手移植 3.1、FreeRTOS移植准备 3.2、FreeRTOS移植步骤 3.2.1、将 FreeRTOS 源码添加至基础工程、头文件路径等…...

linux下sd卡的备份与还原
在Ubuntu上制作SD卡备份镜像,你可以使用dd命令。以下是一个基本的步骤和示例代码: 插入SD卡到电脑。确定SD卡设备路径,使用lsblk或sudo fdisk -l命令。确定备份镜像文件的路径。使用dd命令制作备份。 示例代码: bash# 查看连接的…...

Spring Boot项目中集成Logback作为日志框架-笔记
在Spring Boot项目中集成Logback作为日志框架是一个标准做法,因为Spring Boot默认就使用Logback作为日志系统。以下是集成Logback的步骤: 1. 默认集成 Spring Boot会自动配置Logback,所以通常情况下,你不需要添加任何额外的依赖或…...

Python_GUI框架 PyQt 与 Pyside6的介绍
Python_GUI框架 PyQt 与 Pyside6的介绍 一、简介 在Python的GUI(图形用户界面)开发领域,PyQt和PySide6是两个非常重要的工具包。它们都基于Qt库,为Python开发者提供了丰富的GUI组件和强大的功能。当然Python也有一些其他的GUI工…...
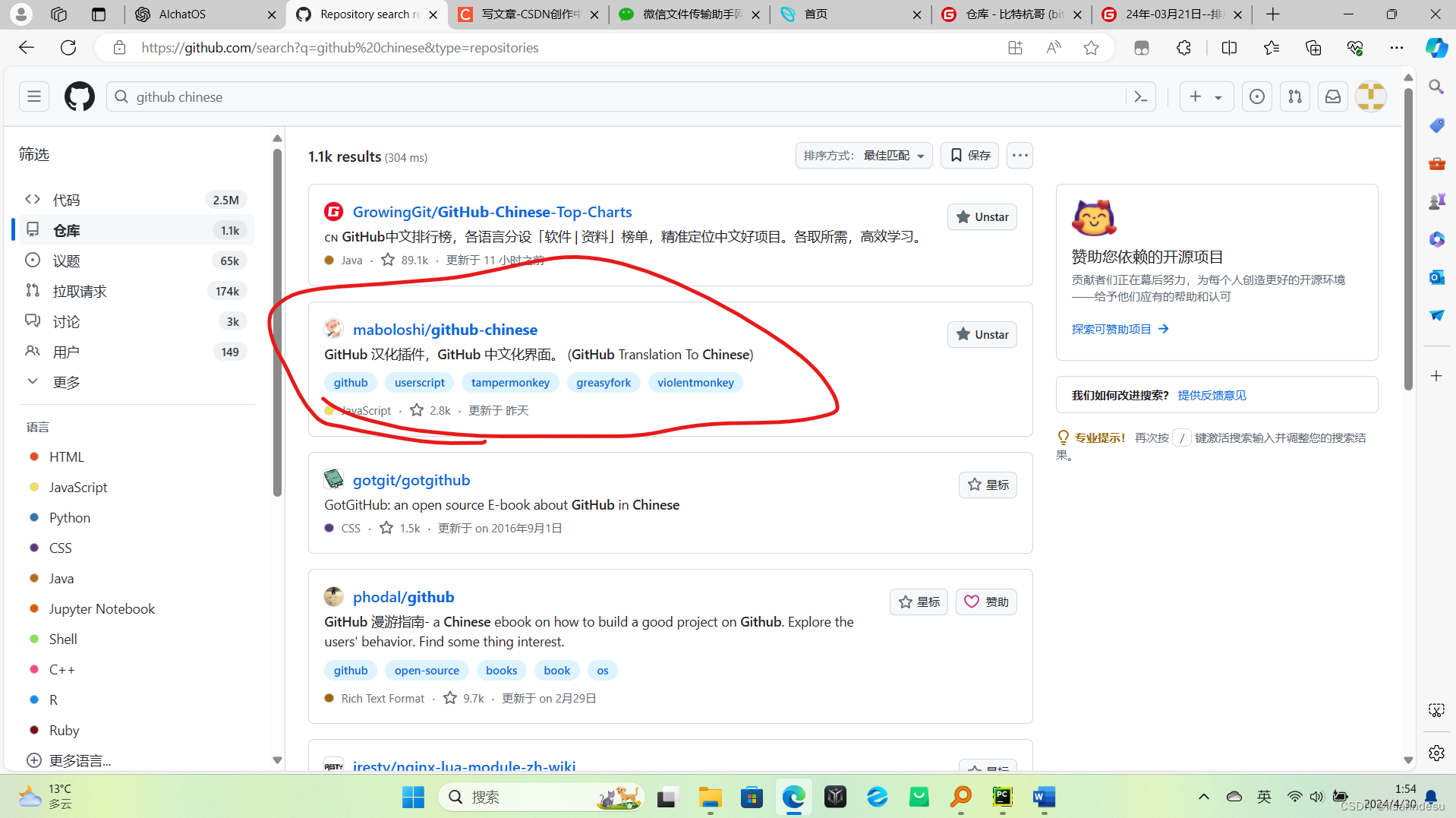
Github入门
GitHub 入门指南:从零开始学习使用 GitHub GitHub 是全球最大的代码托管平台之一,不仅是开发者们交流与协作的重要场所,也是学习与分享优秀代码的宝库。无论你是一位新手开发者还是经验丰富的专家,GitHub 都是你必须掌握的利器之…...
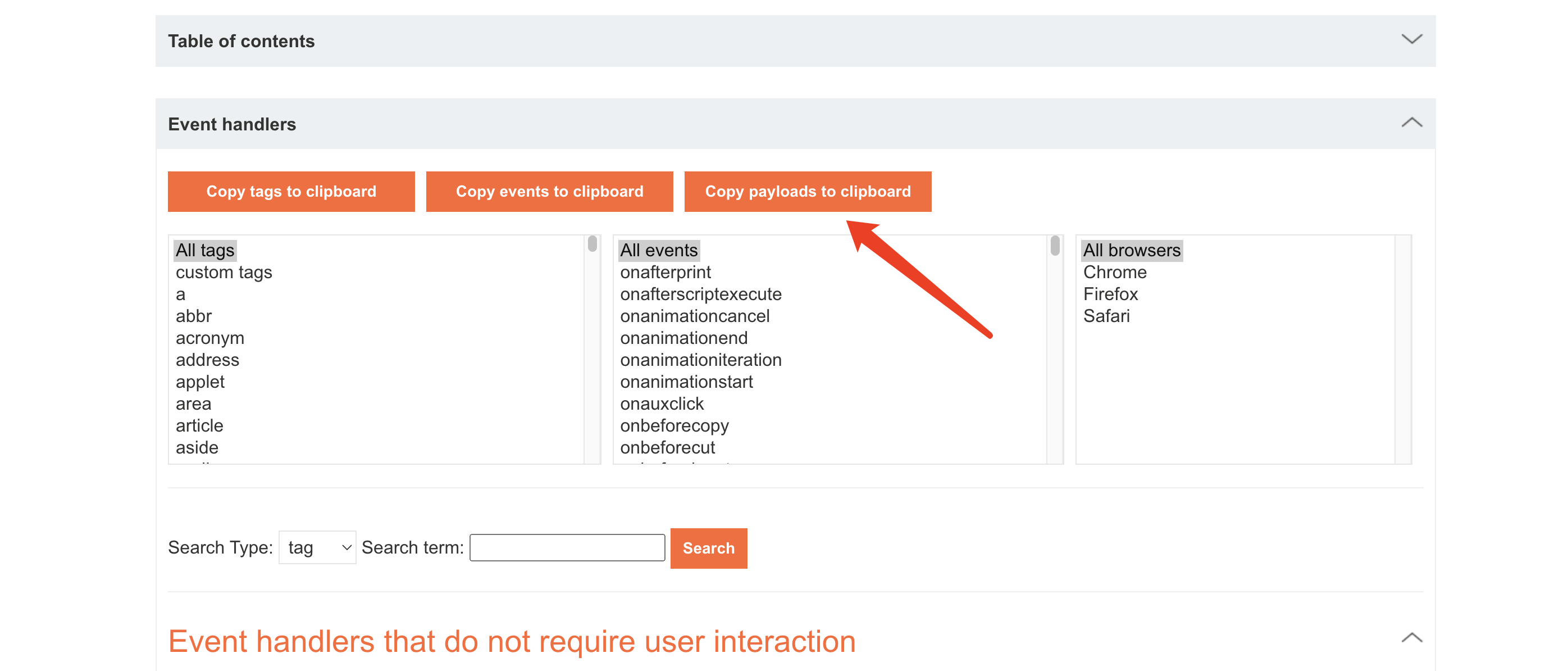
【Web漏洞指南】XSS漏洞详细指南
【Web漏洞指南】XSS漏洞详细指南 概述XSS的三种类型执行任意 JS 代码的方式在原始HTML中注入绕过手法在 HTML标记内注入绕过手法在JavaScript代码中注入绕过手法其他绕过手法XSS常见有效载荷检索Cookies窃取页面内容键盘记录器查找内部IP地址端口扫描器自动填充密码捕获窃取 Po…...

Labels and Databases for Mac:强大的标签与数据库管理工具
Labels and Databases for Mac是一款集标签制作与数据库管理于一体的强大工具,专为Mac用户打造,旨在提供高效、便捷的标签制作与数据管理体验。 这款软件拥有丰富的内置标签格式,用户可轻松创建各种标签、信封和卡片,满足个性化需…...
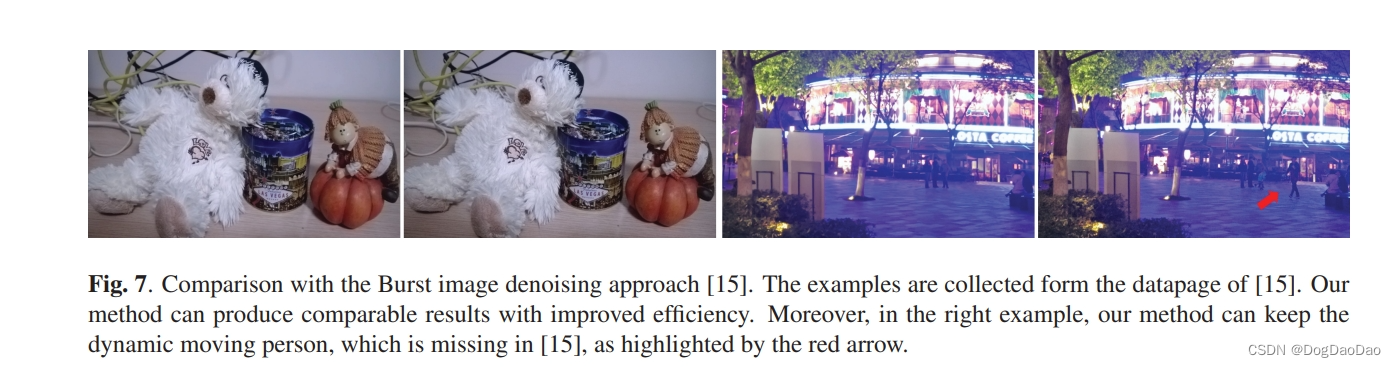
视频降噪算法 Meshflow 介绍
介绍 Meshflow 视频降噪算法来自于 2017 年电子科技大学一篇高质量论文。 该论文提出了一个新的运动模型MeshFlow,它是一个空间平滑的稀疏运动场 (spatially smooth sparse motion field),其运动矢量 (motion vectors) 仅在网格顶点 (mesh vertexes) 处…...
情感类ppt素材
小清新手绘插画风毕业季毕业相册同学录画册纪念册PPT下载 - 觅知网这是一张关于清新毕业相册的PPT模板,清新风格设计,加上风为装饰元素,包含毕业相册、毕业季、毕业、同学、纪念等主题内容,也可用作毕业相册PPT、毕业季PPT、毕业P…...
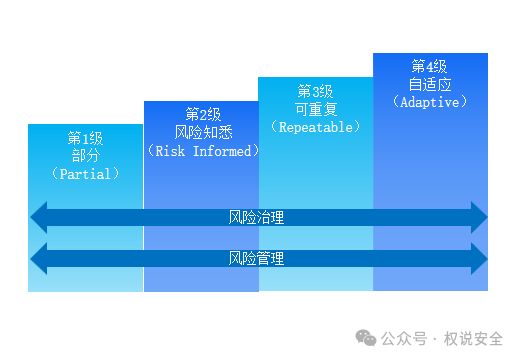
专家解读 | NIST网络安全框架(1):框架概览
随 着信息技术的快速发展,组织面临着越来越严峻的网络安全挑战。NIST网络安全框架(NIST Cybersecurity Framework,CSF)是一个灵活的综合性指南,旨在协助各类组织建立、改进和管理网络安全策略,以加强网络安…...
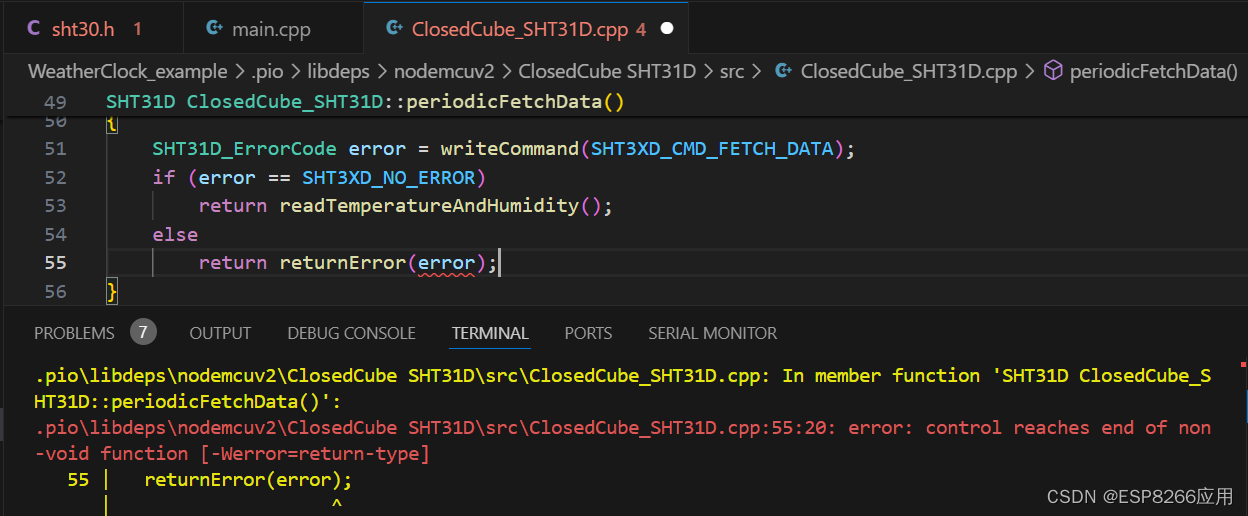
【NodeMCU实时天气时钟温湿度项目 3】连接SHT30传感器,获取并显示当前环境温湿度数据(I2C)
今天,我们开始第三个专题:连接SHT30温湿度传感器模块,获取当前环境实时温湿度数据,并显示在1.3寸TFT液晶显示屏上。 第一专题内容,请参考 【NodeMCU实时天气时钟温湿度项目 1】连接点亮SPI-TFT屏幕和UI布局设计…...

Unity3D DOTween
简单介绍一下 DOTween 插件的使用。 导入插件 先到 Asset Store 获取 DOTween 插件,然后在 Package Manager 的 My Assets 中搜索,下载并导入插件。 导入后,会自动弹出一个窗口,提示需要先对插件进行配置。 点击上图中的按钮&am…...
罗宾斯《管理学》第13版/教材讲解/考研真题视频课程/网课
本课程是罗宾斯《管理学》(第13版)精讲班,为了帮助参加研究生招生考试指定考研参考书目为罗宾斯《管理学》(第13版)的考生复习专业课,我们根据教材和名校考研真题的命题规律精心讲解教材章节内容。 序号名…...

docker-compose启动mysql4.7环境搭建
注意: 下面挂载的目录需要自己创建文件夹比如: /home/dockerInfo/composeInfo/volumes/mysqlVolume/var/log/mysql(数据文件) /home/dockerInfo/composeInfo/volumes/mysqlVolume/var/lib/mysql(日志文件)…...

StarryCoding入门教育赛2 题解 C++代码(推荐学习)
比赛地址:https://www.starrycoding.com/contest/6 比赛介绍 系列赛名称:StarryCoding 入门教育赛难度:语法~较低时长: 1.5 1.5 1.5小时比赛时间:约每2-3天一场,一般为晚上18:30~20:00赛后题解࿱…...

【JAVA进阶篇教学】第九篇:MyBatis-Plus用法介绍
博主打算从0-1讲解下java进阶篇教学,今天教学第九篇:MyBatis-Plus用法介绍。 在 MyBatis-Plus 3.5.0 中,LambdaQueryWrapper支持多种条件构造方式,除了等于(eq)、不等于(ne)、大于&a…...

实时音视频通信的主要矛盾及解决方法
实时音视频通信的主要矛盾及解决方法 实时音视频通信的主要矛盾及解决方法实时音视频通信的主要矛盾矛盾的解决方法增加带宽减少数据量适当增加延时提高网络质量快速准确地评估带宽 总结参考 实时音视频通信的主要矛盾及解决方法 实时音视频通信的主要矛盾 实时音视频通信的主…...

【Delphi 爬虫库 4】使用封装好的 XML 解析库对 XML 数据进行解析
由于官方提供的TXMLDocument组件并不是特别好用,有着体积大,速度慢,调用不方便等缺点。 这里直接利用封装好的XML 解析库来对Xml数据进行解析与生成。 文章目录 1、生成XML文件2、解析XML文件3、生成带注释的XML文件4、删除XML文件节点 1、生…...
Flask简介
Flask简介 安装概述使用PyCharm创建一个Flask程序 Flask程序的基本结构初始化路由和视图函数启动服务器请求-响应循环 安装 概述 Flask算是小型框架,小到可以称为“微框架”。Flask 非常小,因此你一旦能够熟练使用它,很可能就能读懂它所有的…...

神经网络中的归一化
我们今天介绍一下神经网络中的归一化方法~ 之前学到的机器学习中的归一化是将数据缩放到特定范围内,以消除不同特征之间的量纲和取值范围差异。通过将原始数据缩放到一个特定的范围内,比如[0,1]或者[-1,1],来消除不同特征之间的量纲和取值范围…...

利用Taotoken模型广场为不同业务场景快速选型合适模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用Taotoken模型广场为不同业务场景快速选型合适模型 为聊天机器人、代码生成助手或内容创作工具挑选一个合适的大模型࿰…...

基于苏格拉底式提问的LLM深度推理:从概念澄清到工程实践
1. 项目概述:当AI学会“苏格拉底式提问”最近在探索如何让大语言模型(LLM)的推理能力更上一层楼时,我遇到了一个非常有意思的开源项目:jumasheff/socratic-rules。这个名字本身就充满了哲学与技术碰撞的火花——“苏格…...

MD源码#MDH5影视源码主题模版下载 苹果CMS V10版
内容目录一、详细介绍二、效果展示1.部分代码2.效果图展示三、学习资料下载一、详细介绍 MD源码#MDH5影视源码主题模版下载 苹果CMS V10版 一键部署版本,完美运营版本带采集规则模块 system/include.html–公共引用文件 system/header.html–头部文件 system/foo…...

AHB与APB总线桥接设计及SoC系统优化
1. AHB总线架构与APB桥接设计精要在复杂SoC设计中,AMBA总线作为ARM架构的核心互联标准,其AHB(Advanced High-performance Bus)与APB(Advanced Peripheral Bus)的协同工作直接影响系统性能。APB桥作为高低速…...

AI编程技能自学习:构建Claude与Cursor的智能协同开发环境
1. 项目概述:当Claude遇上Cursor,一场关于AI编程技能的自我进化最近在GitHub上看到一个挺有意思的项目,叫Self-Learning-Claude-Skill。虽然项目描述和正文都还是空的,但光看这个标题和关键词——claude-code、cursor、skills——…...
zotero-pdf-translate自动翻译失效:5步快速诊断与修复指南
zotero-pdf-translate自动翻译失效:5步快速诊断与修复指南 【免费下载链接】zotero-pdf-translate Translate PDF, EPub, webpage, metadata, annotations, notes to the target language. Support 20 translate services. 项目地址: https://gitcode.com/gh_mirr…...

dojo.md:从提示词工程到技能工程,打造稳定可靠的AI智能体
1. 项目概述:为什么你的AI助手在演示时很聪明,一上线就“翻车”? 你有没有过这样的经历?精心调教了一个AI助手,让它帮你写邮件、处理客服问题或者生成广告文案,在测试环境里它对答如流,表现堪称…...

AI 重构泳装产业,先智先行如何破解行业痛点
春夏季泳装市场需求旺盛,但多数企业深陷效率与成本双重焦虑:设计周期冗长、打板损耗偏高、营销内容同质化严重,难以快速响应潮流变化。北京先智先行科技有限公司聚焦 AI 技术赋能,推出 “先知大模型”“先行 AI 商学院”“先知 AI…...

【DeepSeek+Grafana可视化实战指南】:20年SRE亲授5大避坑法则与实时指标监控黄金配置
更多请点击: https://intelliparadigm.com 第一章:DeepSeekGrafana可视化实战导论 DeepSeek 系列大模型(如 DeepSeek-V2、DeepSeek-Coder)在推理服务中产生丰富的运行时指标——包括 token 吞吐量、P99 延迟、GPU 显存占用、请求…...

5分钟掌握中兴光猫配置解密:解决网络维护难题的终极方案
5分钟掌握中兴光猫配置解密:解决网络维护难题的终极方案 【免费下载链接】ZET-Optical-Network-Terminal-Decoder 项目地址: https://gitcode.com/gh_mirrors/ze/ZET-Optical-Network-Terminal-Decoder 你是否曾经面对加密的中兴光猫配置文件束手无策&#…...