双目深度估计原理立体视觉
双目深度估计原理&立体视觉
- 0. 写在前面
- 1. 双目估计的大致步骤
- 2. 理想双目系统的深度估计公式推导
- 3. 双目标定公式推导
- 4. 极线校正理论推导
0. 写在前面
双目深度估计是通过两个相机的对同一个点的视差来得到给该点的深度。
标准系统的双目深度估计的公式推导需要满足:1)两个相机的光轴水平; 2) 两个相机焦距分辨率一致,也即内参一致;3)两个相机的成像平面水平,两个相机坐标系之间只存在x轴方向的平移关系。
但是得到的双目系统,不一定满足上述的三个条件,两个相机的坐标系之间大概率存在某个旋转平移关系,因此在使用标准系统的双目估计原理公式之前,需要首先完双目相机之间的外参标定,得到两者的旋转平移关系。
1. 双目估计的大致步骤
- 摄像头校准: 首先需要对双目摄像头进行校准,确保两个摄像头的成像参数(如焦距、主点位置、畸变参数等)已经准确标定。
- 立体视觉匹配: 使用立体视觉技术对左右两个摄像头捕获的图像进行匹配。这通常涉及在两个图像中找到对应的特征点或特征区域,比如角点、边缘等。
- 视差计算: 通过匹配得到的对应点,计算它们在左右图像之间的视差(disparity)。视差是指同一物体在两个图像中对应点的像素偏移量,视差越大表示物体距离摄像头越近。
- 三角测距: 利用视差信息和摄像头之间的几何关系,可以使用三角测量原理计算物体的距离。这通常需要知道摄像头的基线长度(两个摄像头之间的距离)和相机的内参(如焦距、主点位置等)。
- 深度估计: 根据视差信息和摄像头参数,可以进行深度估计,得到物体到摄像头的距离信息。这通常是通过将视差转换为实际距离的公式来实现的。
如果两个相机因为安装位置或者某些原因造成了不满足理想双目系统的萨格条件,就需要一些复杂的方法,最简单的方法就是得到两者的旋转平移矩阵,完成其中一个相机的旋转和平移,构造一个虚拟的相机(安装位置姿态与另一个相机之间满足理想双目系统)。
2. 理想双目系统的深度估计公式推导
双目深度估计是通 过两个相机的对同一个点的视差来得到给该点的深度。只要得到某个点在两个图片中的视差,就可以得出该点的深度。
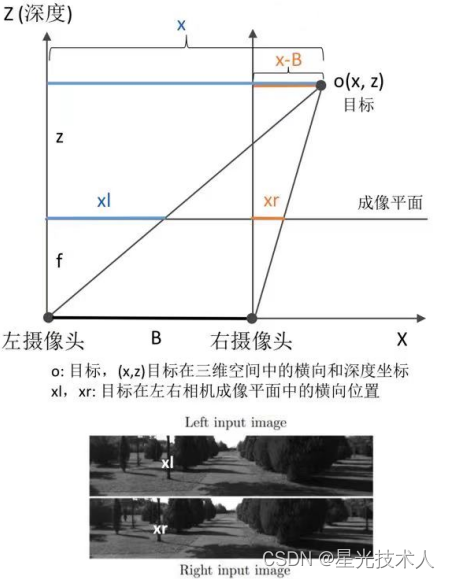
如图所示, B B B为基线长度, f f f为相机焦距, d d d为视差, x l , x r x_l,x_r xl,xr分别表示目标点在左右相机图像中的的像素u坐标。其中 f , B f,B f,B是固定值,深度计算步骤如下:
{ f z = x l x f z = x r x − B \begin{align} \begin{cases} {f \over z} = {x_l \over x } \\ {f \over z} = {x_r \over x-B} \end{cases} \end{align} {zf=xxlzf=x−Bxr
得,
z = f B x l − x r = f B d \begin{align} z = {fB \over x_l - x_r} = {fB \over d} \end{align} z=xl−xrfB=dfB
因此只要知道目标点在两个图片中得像素差,就能得到深度z。
3. 双目标定公式推导
因为得到得双目系统不一定为理想状态,所以需要得到两者得位姿关系。
事先声明如下定义:
p w p_w pw: 某目标点P在世界系下的笛卡尔3D坐标
p c l p_{cl} pcl:该点在左相机坐标系中的笛卡尔3D坐标
p c r p_{cr} pcr: 该点在右相机坐标系中的笛卡尔3D坐标
R c l w R_{cl}^w Rclw: 旋转关系convert a point from left camera coordinate to world
R c r w R_{cr}^w Rcrw: 旋转关系convert a point from right camera coordinate to world
t c l w t_{cl}^w tclw: 平移关系convert a point from left camera coordinate to world
t c r w t_{cr}^w tcrw: 平移关系convert a point from right camera coordinate to world
可以得到如下的关系
{ p w = R c l w ⋅ p c l + t c l w p w = R c r w ⋅ p c r + t c r w \begin{align} \begin{cases} p_w = R_{cl}^w \cdot p_{cl} + t_{cl}^w \\ p_w = R_{cr}^w \cdot p_{cr} + t_{cr}^w \end{cases} \end{align} {pw=Rclw⋅pcl+tclwpw=Rcrw⋅pcr+tcrw
式(3)可得
R c l w ⋅ p c l + t c l w = R c r w ⋅ p c r + t c r w \begin{align} R_{cl}^w \cdot p_{cl} + t_{cl}^w = R_{cr}^w \cdot p_{cr} + t_{cr}^w \\ \end{align} Rclw⋅pcl+tclw=Rcrw⋅pcr+tcrw
同乘 R c r w − 1 {R_{cr}^w}^{-1} Rcrw−1 得,
R c r w − 1 ⋅ R c l w ⋅ p c l + R c r w − 1 ⋅ t c l w = R c r w − 1 ⋅ R c r w ⋅ p c r + R c r w − 1 ⋅ t c r w R c r w − 1 ⋅ R c l w ⋅ p c l + R c r w − 1 ⋅ t c l w = p c r + R c r w − 1 ⋅ t c r w p c r = R c r w − 1 ⋅ R c l w ⋅ p c l + R c r w − 1 ⋅ t c l w − R c r w − 1 ⋅ t c r w \begin{align} {R_{cr}^w}^{-1} \cdot R_{cl}^w \cdot p_{cl} + {R_{cr}^w}^{-1} \cdot t_{cl}^w &={R_{cr}^w}^{-1} \cdot R_{cr}^w \cdot p_{cr}+ {R_{cr}^w}^{-1} \cdot t_{cr}^w \\ {R_{cr}^w}^{-1} \cdot R_{cl}^w \cdot p_{cl} + {R_{cr}^w}^{-1} \cdot t_{cl}^w &= p_{cr}+ {R_{cr}^w}^{-1} \cdot t_{cr}^w \\ p_{cr} &= {R_{cr}^w}^{-1} \cdot R_{cl}^w \cdot p_{cl} + {R_{cr}^w}^{-1} \cdot t_{cl}^w - {R_{cr}^w}^{-1} \cdot t_{cr}^w \end{align} Rcrw−1⋅Rclw⋅pcl+Rcrw−1⋅tclwRcrw−1⋅Rclw⋅pcl+Rcrw−1⋅tclwpcr=Rcrw−1⋅Rcrw⋅pcr+Rcrw−1⋅tcrw=pcr+Rcrw−1⋅tcrw=Rcrw−1⋅Rclw⋅pcl+Rcrw−1⋅tclw−Rcrw−1⋅tcrw
最终得,
p c r = R c l c r ⋅ p c l + t c l c r \begin{align} p_{cr} &= R_{cl}^{cr} \cdot p_{cl} + t_{cl}^{cr} \\ \end{align} pcr=Rclcr⋅pcl+tclcr
其中,
R c l c r = R c r w − 1 ⋅ R c l w t c l c r = R c r w − 1 ⋅ t c l w − R c r w − 1 ⋅ t c r w \begin{align} R_{cl}^{cr} &= {R_{cr}^w}^{-1} \cdot R_{cl}^w \\ t_{cl}^{cr} &= {R_{cr}^w}^{-1} \cdot t_{cl}^w - {R_{cr}^w}^{-1} \cdot t_{cr}^w \end{align} Rclcrtclcr=Rcrw−1⋅Rclw=Rcrw−1⋅tclw−Rcrw−1⋅tcrw
注意,式(9)(10)中左右相机世界系的位姿在完成左右相机各自的标定以后,就已经得到了。所以可以直接使用。一对棋盘格位姿的左右相机照片,就可以构成式(9)(10)两个。因为拍摄了多张图片,利用最小二乘法等某种非线性优化的的方式,最小化误差,即可得到我们最佳估计的 矩阵,有了这两个矩阵,就可以进一步进行两个相机的极线修正了。式(9)为右相机成像平面到左相机成像平面的旋转矩阵(convert a point from left camera coordinate to right camera).
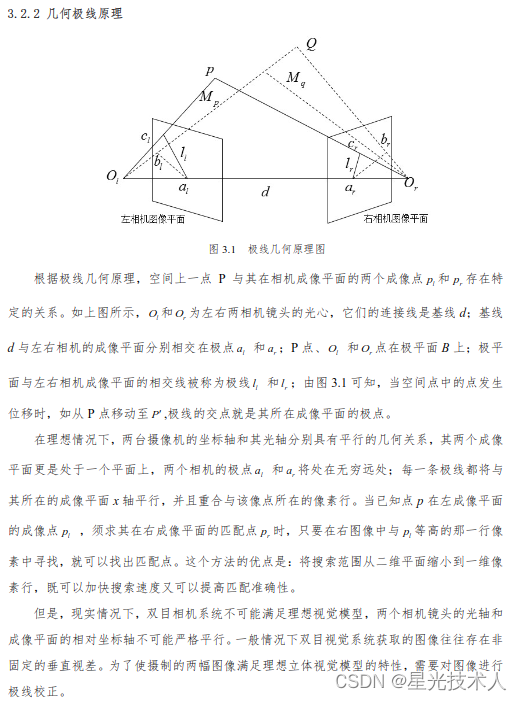
4. 极线校正理论推导
通过3得到的两者的位姿关系,完成两个相机的极线矫正。进而通过2的步骤完成深度估计
极线较正完成的是两个相机位置姿态的调整,使得左右相机达到理想双目系统的位置关系。下面是较正前后的位置状态对比‘极线校正的基本方法是对两幅图像做投影变换,使两幅图像上的对应匹配点所在的极线共线。本质上就是将相机固有的透视矩阵经过相应的几何变换得到新的透视矩阵,使得转换后的两幅图像的极线保持水平。最常见的校正方法就是Bouguet极线校正方法。opencv中的API名称为 cvStereoRectify
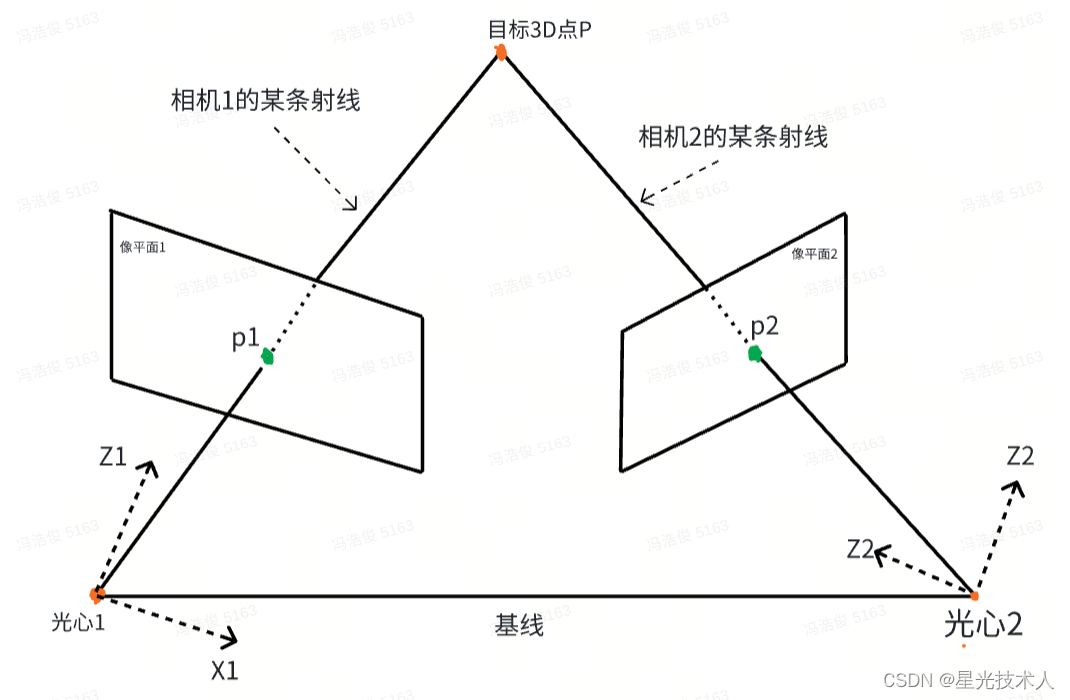
- 校正前的双目相机位姿关系
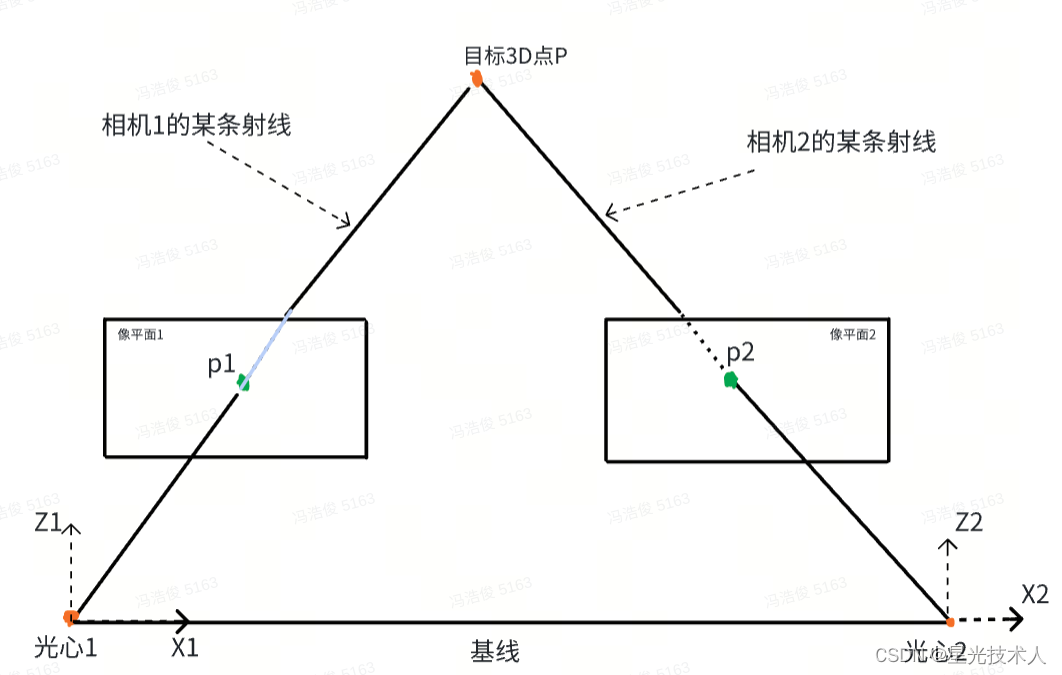
- 校正后的双目相机位姿关系
计算某个特征点的视差是在校正后的双目相机像平面中求得,需要注意的是,校正后的相机位置姿态是一个虚拟位置姿态,与原来的位置之间存在一个旋转关系(假如较正前后的光心位置一致),这个旋转关系就是单应矩阵,也是IPM算法思想的基础。
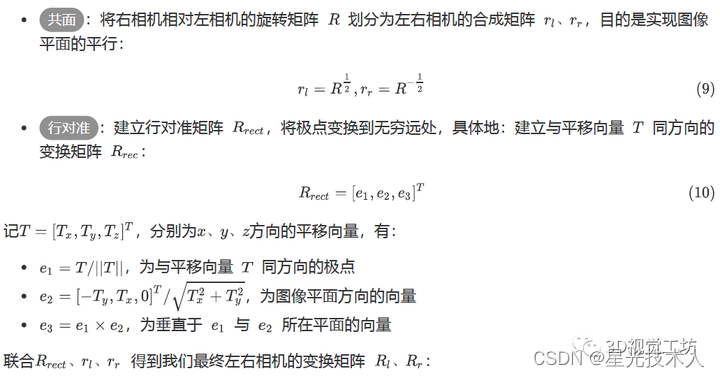
Bouguet极线校正方法:左右相机成像平面各旋转一半,使得左右图像重投影造成的误差最小,左右视图的共同面积最大。
使用 Bouguet 算法进行其极线校正的基本原理为:首先要最大限度得降低两幅双目图像中各帧的相同投影频次,其次要使每一帧的相同投射误差最小,最后尽量增加其观测的面积。设右相机成像平面到左相机成像平面的旋转矩阵为 cR ,然后把它分解为两个子旋转矩阵 1r 和 2r 。当使用这两个左右转换矩阵分别旋转左右相机时,两相机刚好能产生 1/2 角点上的旋转量,因此主光线向量的朝向能和旋转前维持一致。
后边的过程等以后需要的时候再做研究

https://zhuanlan.zhihu.com/p/362018123
chrome-extension://oemmndcbldboiebfnladdacbdfmadadm/https://engineering.purdue.edu/~byao/Thesis/%E7%A1%95%E5%A3%AB%E8%AE%BA%E6%96%87-%E9%9F%A9%E4%BF%A1_ZJU16.pdf
https://blog.csdn.net/x_r_su/article/details/52683754
相关文章:
双目深度估计原理立体视觉
双目深度估计原理&立体视觉 0. 写在前面1. 双目估计的大致步骤2. 理想双目系统的深度估计公式推导3. 双目标定公式推导4. 极线校正理论推导 0. 写在前面 双目深度估计是通过两个相机的对同一个点的视差来得到给该点的深度。 标准系统的双目深度估计的公式推导需要满足:1)两…...
Redis探索之旅(基础)
目录 今日良言:满怀憧憬,阔步向前 一、基础命令 1.1 通用命令 1.2 五大基本类型的命令 1.2.1 String 1.2.2 Hash 1.2.3 List 1.2.4 Set 1.2.5 Zset 二、过期策略以及单线程模型 2.1 过期策略 2.2 单线程模型 2.3 Redis 效率为什么这么高 三…...

C语言/数据结构——每日一题(链表的中间节点)
一.前言 今天我在LeetCode刷到了一道单链表题,想着和大家分享一下这道题:https://leetcode.cn/problems/middle-of-the-linked-list。废话不多说让我们开始今天的知识分享吧。 二.正文 1.1题目描述 1.2题目分析 这道题有一个非常简便的方法——快慢指…...

这是用VS写的一个tcp客户端和服务端的demo
服务端: 客户端: 其实这里面的核心代码就两行。 客户端的核心代码: //套接字连接服务端 m_tcpSocket->connectToHost(_ip,_port);//通过套接字发送数据m_tcpSocket->write(ui.textEditSend->toPlainText().toUtf8());//如果收到信…...

代码随想录算法训练营day18 | 102.二叉树的层序遍历、226.翻转二叉树、101. 对称二叉树
102.二叉树的层序遍历 迭代法 层序遍历使用队列,同时记录每层的个数 class Solution:def levelOrder(self, root: Optional[TreeNode]) -> List[List[int]]:res []if not root:return resqueue collections.deque()queue.append(root)while queue:size len…...
--设备通信协议详解及选型)
工厂自动化升级改造参考(01)--设备通信协议详解及选型
以下是整合了通信协议的特点、应用场景、优缺点以及常用接口方式的描述: 以太网/IP: 来历: 以太网是一种局域网技术,由罗伯特梅特卡夫和大卫博格在1973年开发。IP是网络层协议,负责在网络中的设备间传输数据。特点:基于标准的以太网技术,使用TCP/IP协议栈,支持高速数据传…...
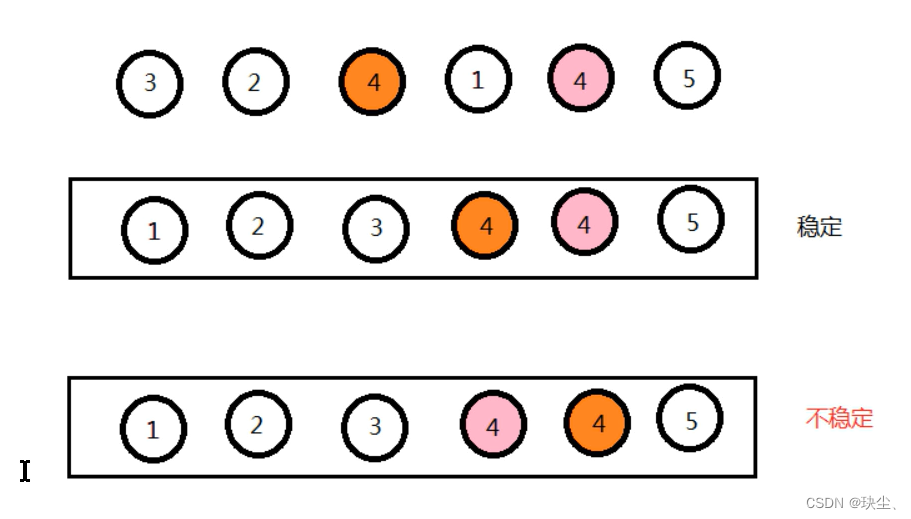
数据结构与算法之经典排序算法
一、简单排序 在我们的程序中,排序是非常常见的一种需求,提供一些数据元素,把这些数据元素按照一定的规则进行排序。比如查询一些订单按照订单的日期进行排序,再比如查询一些商品,按照商品的价格进行排序等等。所以&a…...
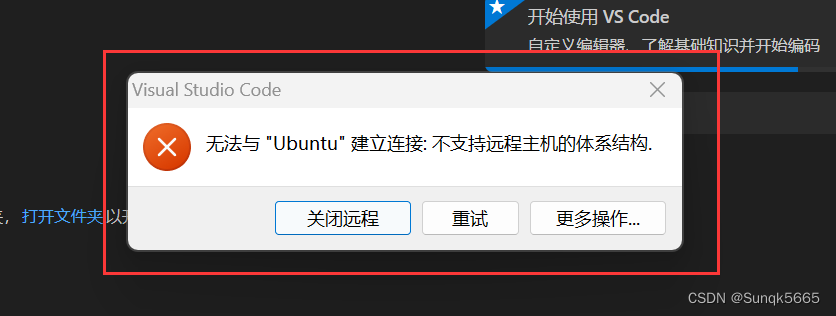
VSCode通过SSH连接虚拟机Ubuntu失败
问题说明 最近使用VSCode通过SSH连接Ubuntu,通过VSCode访问Ubuntu进行项目开发,发现连接失败 在VSCode中进行SSH配置 这些都没有问题,但在进行连接时候出现了问题,如下: 出现了下面这个弹窗 解决方法 发现当…...
在Codelab对llama3做Lora Fine tune微调
Unsloth 高效微调大模型的工具,通过Unsloth微调Llama3, Mistral, Gemma 速度提升2-5倍,内存减少70%! Codelab 创建一个jupyter notebook 选择 T4 GPU 安装Fine tune 相关的lib %%capture import torch major_version, minor_version torch…...
KEIL 5.38的ARM-CM3/4 ARM汇编设计学习笔记13 - STM32的SDIO学习5 - 卡的轮询读写擦
KEIL 5.38的ARM-CM3/4 ARM汇编设计学习笔记13 - STM32的SDIO学习5 - 卡的轮询读写擦 一、前情提要二、目标三、技术方案3.1 读写擦的操作3.1.1 读卡操作3.1.2 写卡操作3.1.3 擦除操作 3.2 一些技术点3.2.1 轮询标志位的选择不唯一3.2.2 写和擦的卡状态查询3.2.3 写的速度 四、代…...
:UdpClient、UdpServer、UdpCast、UdpNode的区别)
【C++】HP-Socket(三):UdpClient、UdpServer、UdpCast、UdpNode的区别
1、简述 UDP是无连接的,在UDP传输层中并没有客户端和服务端的概念。但是可以在应用层定义客户端和服务端,可以灵活的互换客户端和服务端,或者同时既是客户端也是服务端。 HP-Socket中在应用层定义了四种UDP组件:UdpClient、UdpS…...

java设计模式六 访问者
访问者模式(Visitor Pattern)是一种设计模式,它允许你将算法附加到对象结构中的各个元素上,而不必修改对象结构本身。它主要用于处理对象结构非常稳定,但频繁需要在此结构上执行不同操作的场景。访问者模式通过将操作移…...
中间件研发之Springboot自定义starter
Spring Boot Starter是一种简化Spring Boot应用开发的机制,它可以通过引入一些预定义的依赖和配置,让我们快速地集成某些功能模块,而无需繁琐地编写代码和配置文件。Spring Boot官方提供了很多常用的Starter,例如spring-boot-star…...
libcity笔记:添加新模型(以RNN.py为例)
创建的新模型应该继承AbstractModel或AbstractTrafficStateModel 交通状态预测任务——>继承 AbstractTrafficStateModel类轨迹位置预测任务——>继承AbstractModel类 1 AbstractTrafficStateModel 2 RNN 2.1 构造函数 2.2 predict 2.3 calculate_loss...
Ansible---自动化运维工具
一、Ansible概述 1.1 Ansible简介 Ansible是一款自动化运维工具,通过ssh对目标主机进行配置、应用部署、任务执行、编排调度等操作。它简化了复杂的环境管理和自动化任务,提高了工作效率和一致性,同时,Ansible的剧本(playbooks)…...

5.Git
Git是一个分布式版本控制工具,主要用于管理开发过程中的源代码文件(Java类、xml文件、html文件等)。通过Git仓库来存储和管理这些文件,Git仓库分为两种 本地仓库:开发人员自己电脑上的Git仓库远程仓库:远程…...
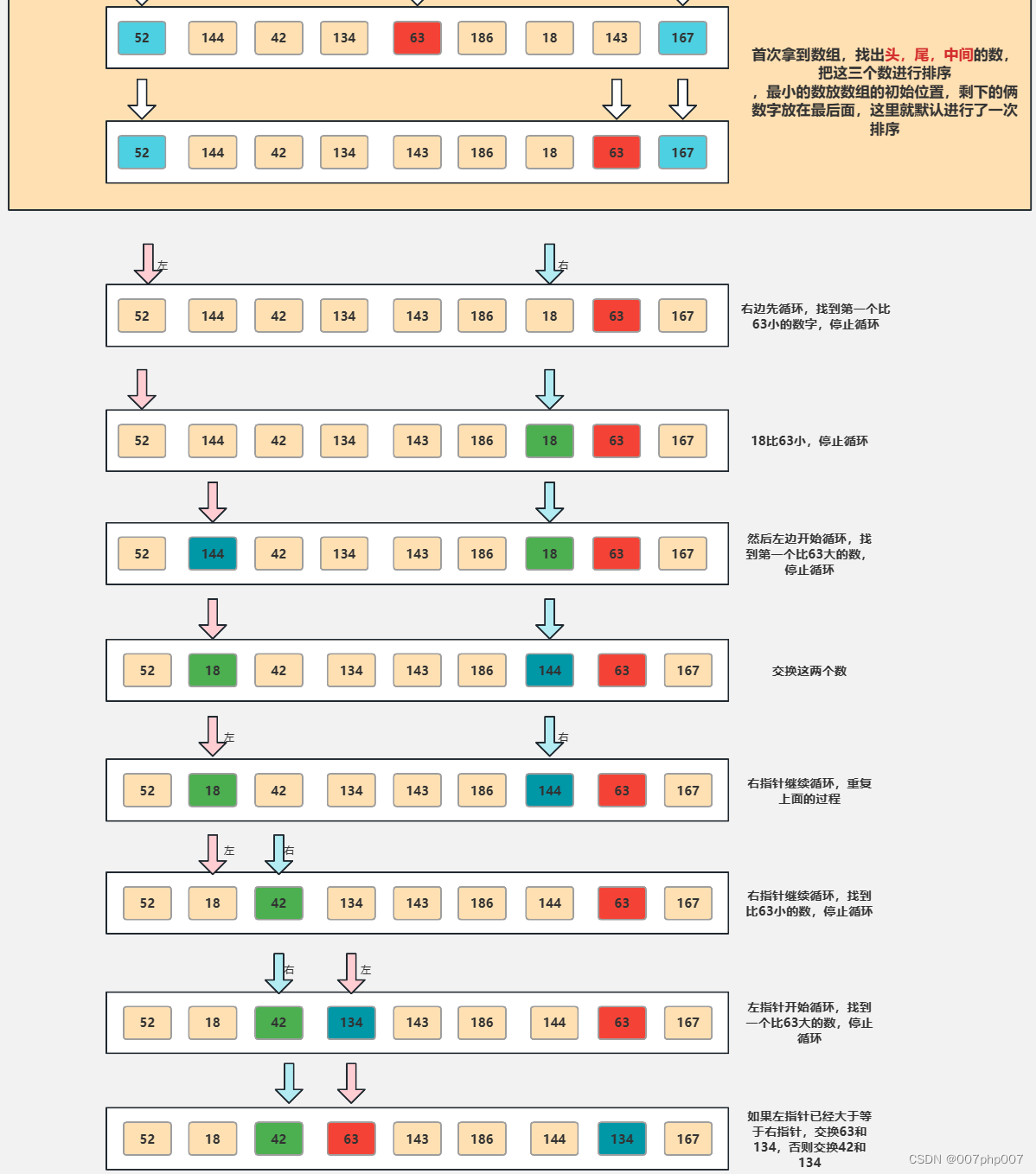
探索中位数快速排序算法:高效寻找数据集的中间值
在计算机科学领域,寻找数据集的中位数是一个常见而重要的问题。而快速排序算法作为一种高效的排序算法,可以被巧妙地利用来解决中位数查找的问题。本文将深入探讨中位数快速排序算法的原理、实现方法以及应用场景,带你领略这一寻找中间值的高…...
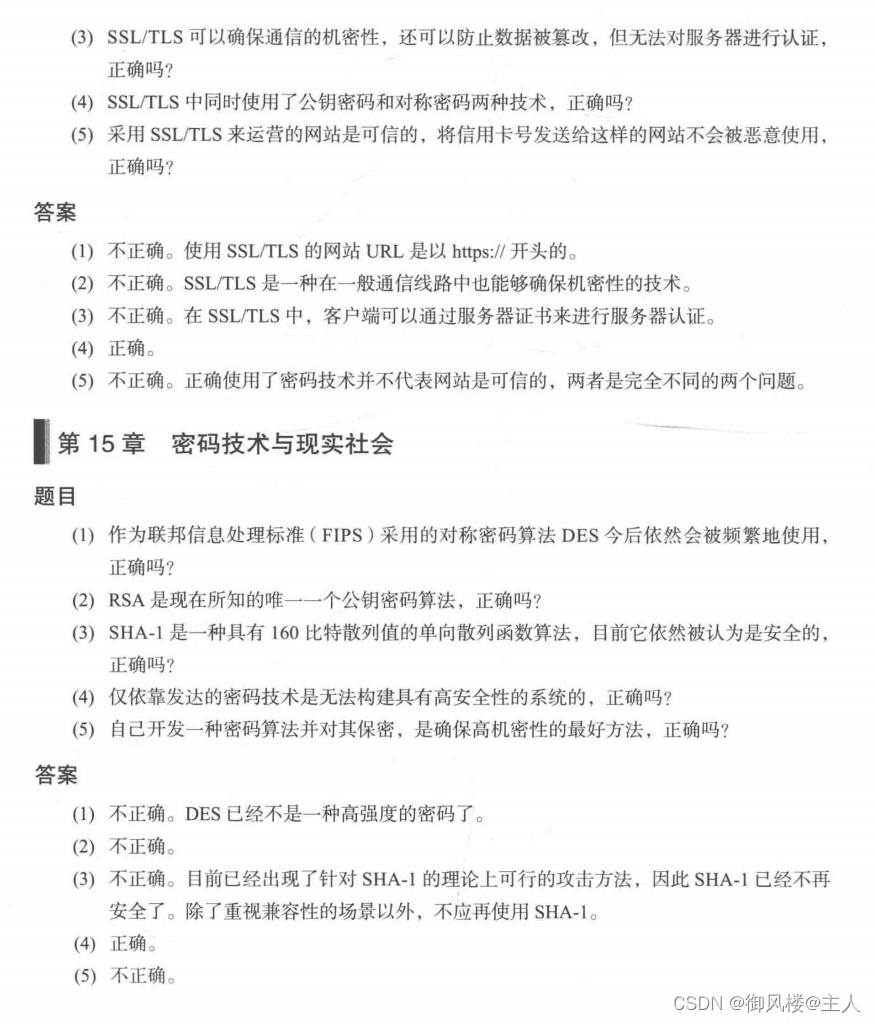
密码学《图解密码技术》 记录学习 第十五章
目录 十五章 15.1本章学习的内容 15.2 密码技术小结 15.2.1 密码学家的工具箱 15.2.2 密码与认证 15.2.3 密码技术的框架化 15.2.4 密码技术与压缩技术 15.3 虚拟货币——比特币 15.3.1 什么是比特币 15.3.2 P2P 网络 15.3.3地址 15.3.4 钱包 15.3.5 区块链 15.3.…...

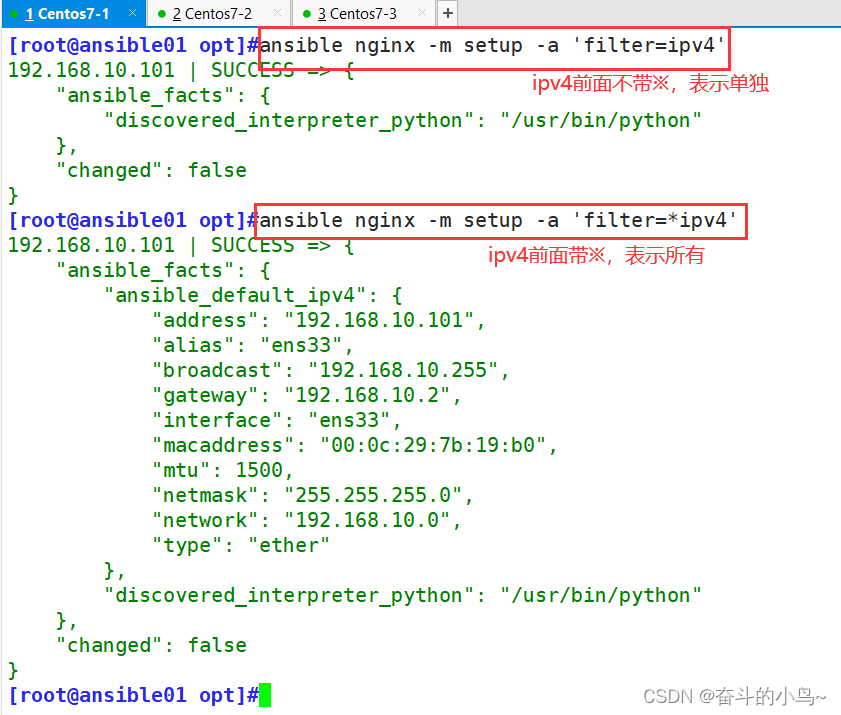
如何在 Ubuntu 16.04 上为 Nginx 创建自签名 SSL 证书
简介 TLS,即传输层安全协议,及其前身SSL,即安全套接字层,是用于将普通流量包装在受保护的加密包装中的网络协议。 使用这项技术,服务器可以在服务器和客户端之间安全地发送流量,而不会被外部方拦截。证书…...

5.协议的编解码
本章内容其实没有多大难度,主要考察大家的细心程度.计算数据长度然后截取相应字节数组并按照协议进行解码,编码则反之。 1.基础消息的编解码 Override public BasicMessage decode(byte[] bytes) {int dataLength ByteUtil.bytesToInt(ByteUtil.extra…...
技术:原理、优化与应用)
光学邻近校正(OPC)技术:原理、优化与应用
1. 光学邻近校正技术概述在半导体制造的光刻工艺中,光学邻近效应(Optical Proximity Effect)是影响图案转移精度的主要挑战之一。当特征尺寸缩小到45nm及以下节点时,光衍射和光阻化学反应导致的图案失真变得尤为显著。具体表现为&…...

HiveWE:现代化魔兽争霸III地图编辑器完全指南
HiveWE:现代化魔兽争霸III地图编辑器完全指南 【免费下载链接】HiveWE A Warcraft III world editor. 项目地址: https://gitcode.com/gh_mirrors/hi/HiveWE 还在为魔兽争霸III原版地图编辑器缓慢的加载速度和复杂的操作而烦恼吗?HiveWE作为一款专…...

终极CAN总线分析利器:Cangaroo完全配置与深度使用指南
终极CAN总线分析利器:Cangaroo完全配置与深度使用指南 【免费下载链接】cangaroo Open source can bus analyzer software - with support for CANable / CANable2, CANFD, and other new features 项目地址: https://gitcode.com/gh_mirrors/ca/cangaroo Ca…...

从洗衣机到无人机:拆解霍尔传感器在BLDC电机中的“交通指挥”角色
从洗衣机到无人机:霍尔传感器如何成为BLDC电机的隐形指挥家 当清晨的洗衣机开始轻柔转动,或是无人机在天空划出精准轨迹时,很少有人会注意到这些设备内部藏着一个精密的"交通指挥系统"。这个系统的核心不是红绿灯,而是一…...

如何用Python 5分钟获取同花顺问财数据?量化分析终极指南
如何用Python 5分钟获取同花顺问财数据?量化分析终极指南 【免费下载链接】pywencai 获取同花顺问财数据 项目地址: https://gitcode.com/gh_mirrors/py/pywencai 还在为获取金融数据而烦恼吗?想快速筛选股票却苦于没有合适工具?今天我…...

从专利大国到专利强国:企业全球专利布局策略与实战指南
1. 从“专利大国”到“专利强国”:一场关于价值与布局的深度思考最近翻看一些行业旧闻,2016年EE Times上那篇关于中国专利“不出海”的讨论,现在读来依然很有嚼头。文章核心就一句话:根据世界知识产权组织(WIPO&#x…...

基于陷门矩阵的高效安全委托计算方案
1. 项目概述在现代计算环境中,线性代数运算(如矩阵乘法)占据了大量计算资源。随着云计算和机器学习的发展,越来越多的计算任务被委托给云端服务器执行。然而,这种委托计算模式带来了严重的数据隐私问题——用户需要将原…...

Fast-GitHub:国内开发者必备的GitHub下载加速终极方案
Fast-GitHub:国内开发者必备的GitHub下载加速终极方案 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub 对于身处国内的开…...

Python操控Photoshop的终极指南:如何用代码实现高效图像处理自动化
Python操控Photoshop的终极指南:如何用代码实现高效图像处理自动化 【免费下载链接】photoshop-python-api Python API for Photoshop. 项目地址: https://gitcode.com/gh_mirrors/ph/photoshop-python-api 如果你还在手动重复Photoshop操作,那么…...

长沙化妆培训哪家专业
在长沙学化妆,很多人都会问:“哪家更靠谱?”其实,选培训机构,关键不是看广告打得多响,而是看它能不能真正帮你学到能上手、能就业的本事。今天想跟你聊聊一个在本地口碑不错的机构——尚美新时代美业培训&a…...