基于EBAZ4205矿板的图像处理:12图像二值化(阈值可调)
基于EBAZ4205矿板的图像处理:12图像二值化(阈值可调)
我的项目是基于EBAZ4205矿板的阈值可调的图像阈值二值化处理,可以通过按键调整二值化的阈值,key1为阈值加1,key4为阈值减1,key2为阈值加10,key5为阈值减10,key54为阈值重置为128。
先看效果

拿我的pynq当模特

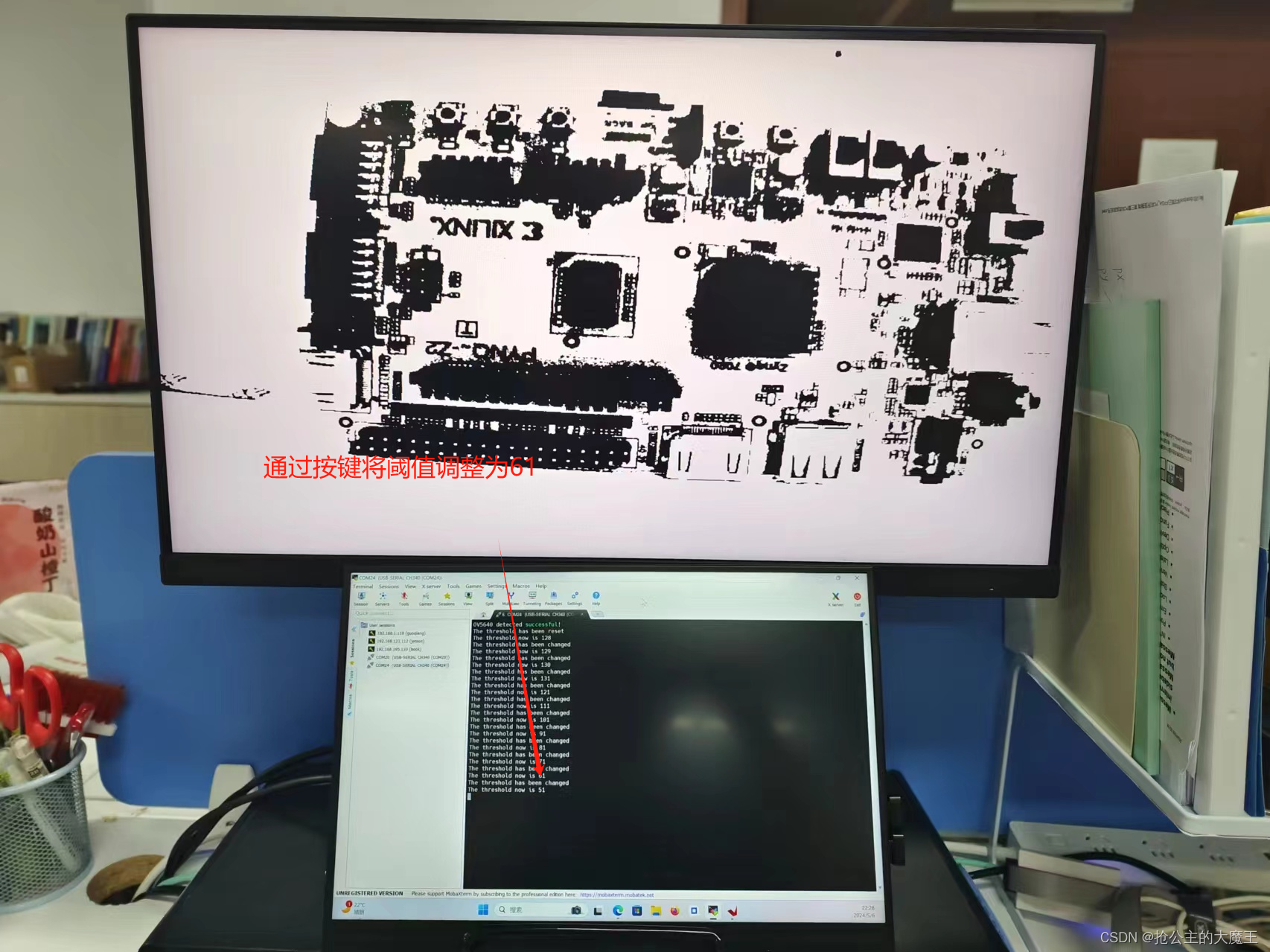
可以清晰的看到xilinx的商标被划分了出来
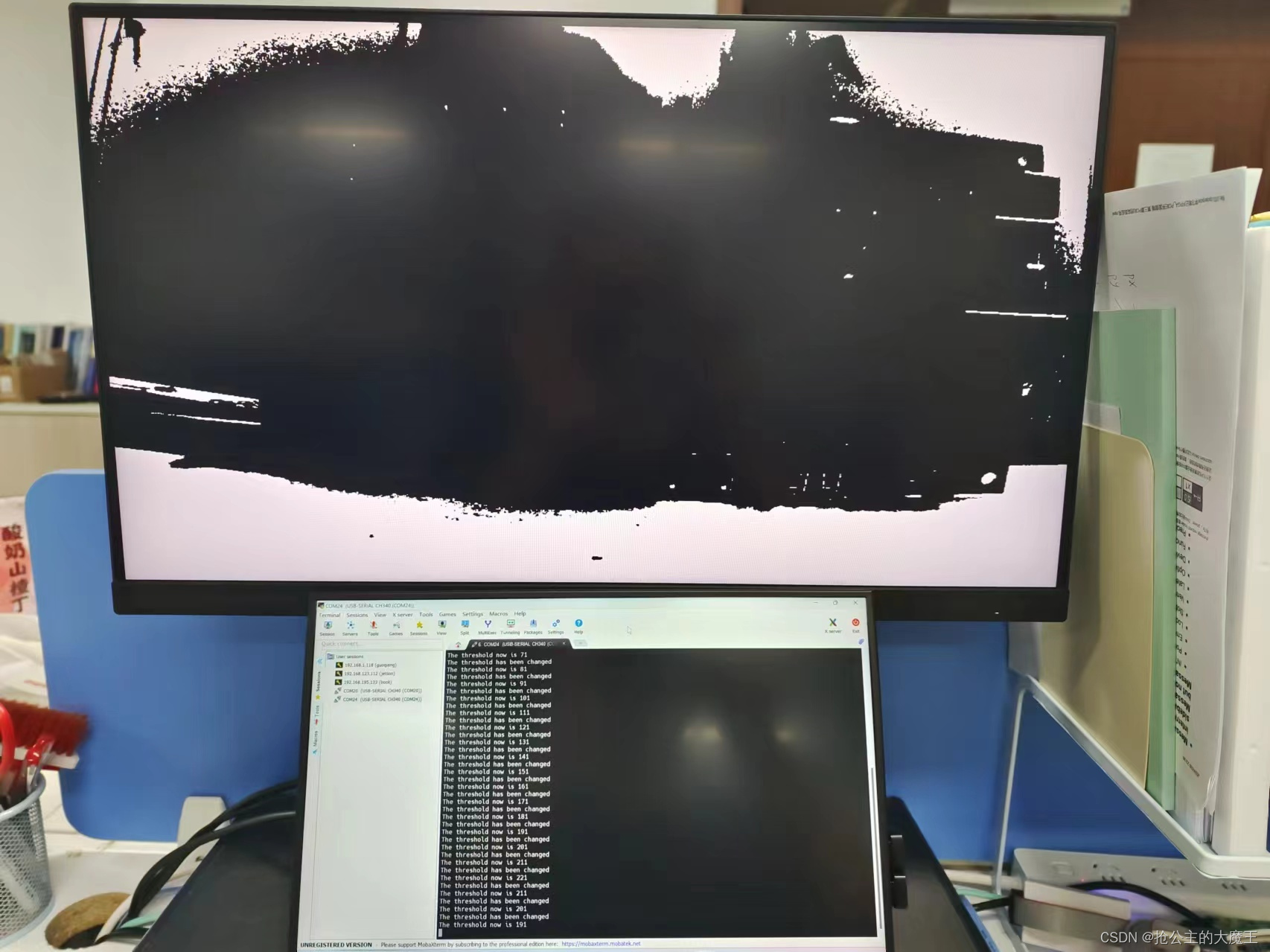
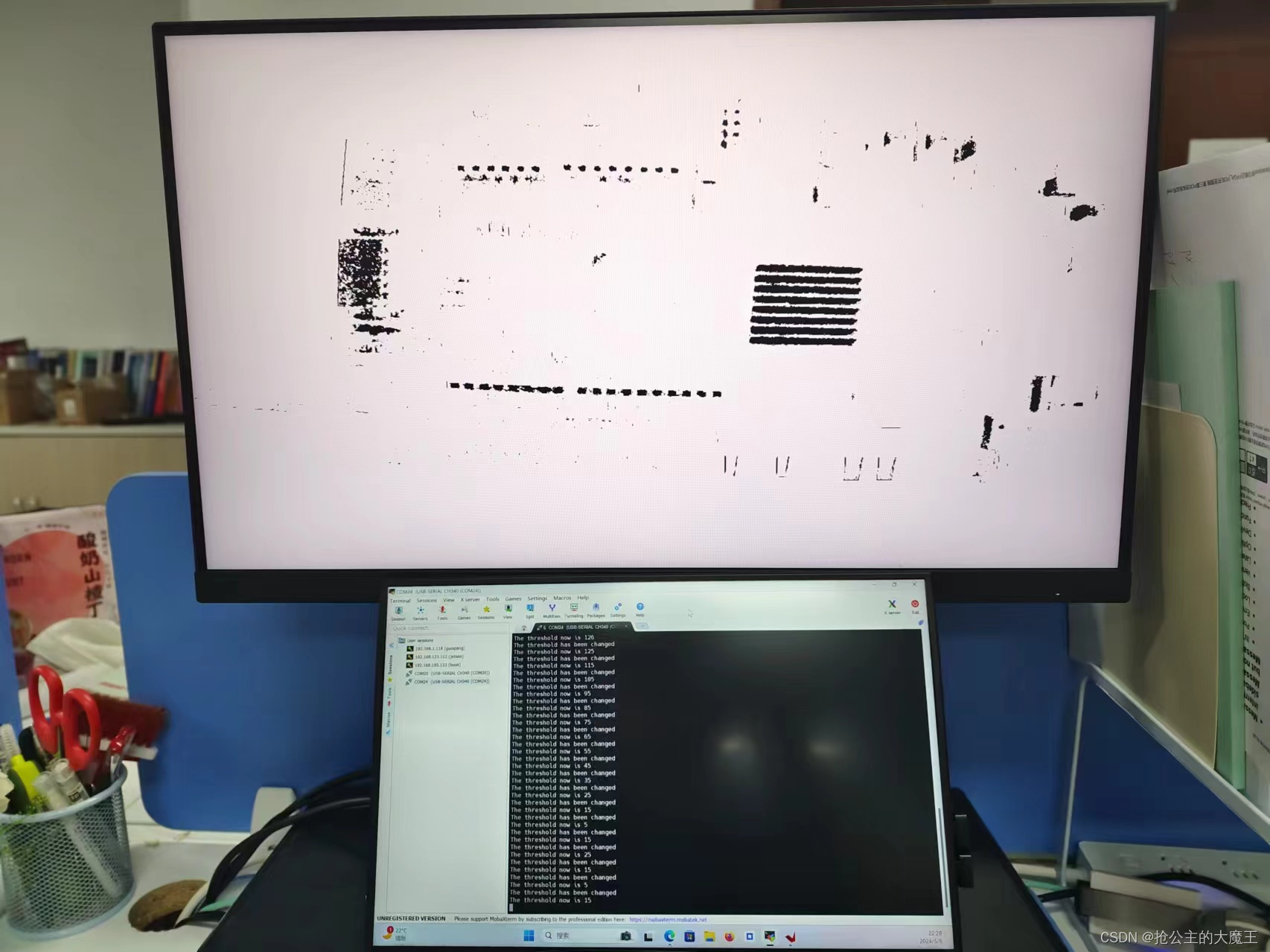
阈值过大和过小就不行了,这也是全局阈值二值化的缺点,接下来我会完成基于卷积的局部阈值二值化,它能得到更好的效果,尽请期待。
项目解读
我的blockdesign,你不按照我的接,按照正点原子的开源代码接也是可以的,只是我有强迫症,能接的我都接了。
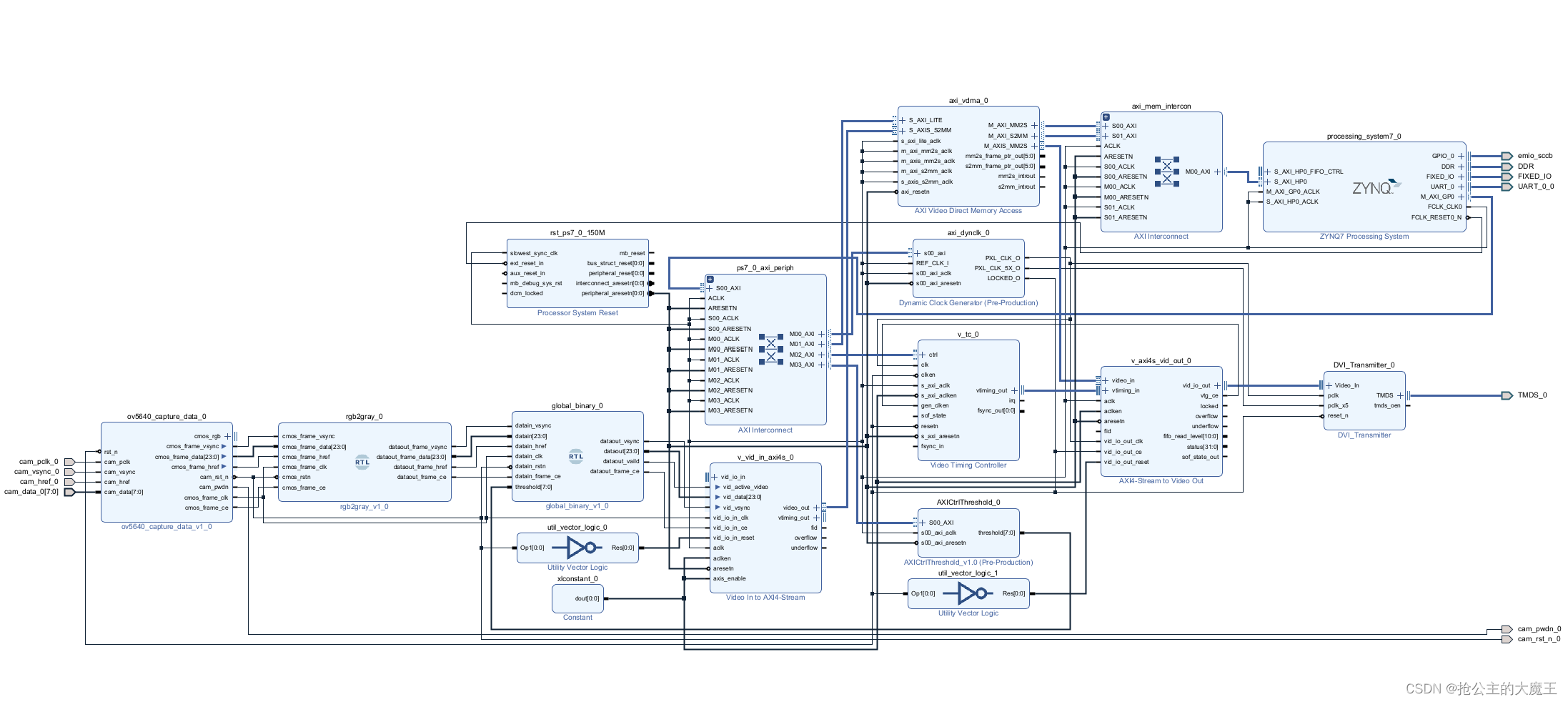
就是在标准的ov5640->VDMA->DDR->VDMA->DVI_Driver->HDMI的流程(可以点击这个超链接看我说的标准流程)的第一个箭头哪里加了三个模块,一个负责将图像从RGB格式转化为灰度图像,一个负责对灰度图像进行二值化处理,最后一个为PS提供了访问PL端reg的AXILite端口,以便实时调整阈值。
下面的代码里我都添加了(* X_INTERFACE_IGNORE = “true” *) ,是禁用vivado的interface自动推断,可以不加
rgb2gray模块
该模块负责将图像从RGB格式转化为灰度图像
公式:
Y = 0.299R +0.587G + 0.114B
Y = (77 R + 150G + 29 *B)>>8
`timescale 1ns / 1ps
//作者:抢公主的大魔王
//功能:将来自ov5640视频流从RGB格式转化为灰度图像
//日期:24.5.5
//版本:1v0
//联系方式:2376635586@qq.com
module rgb2gray((* X_INTERFACE_IGNORE = "true" *) input cmos_frame_vsync,
(* X_INTERFACE_IGNORE = "true" *) input [23:0] cmos_frame_data,
(* X_INTERFACE_IGNORE = "true" *) input cmos_frame_href,(* X_INTERFACE_IGNORE = "true" *) input cmos_frame_clk,
(* X_INTERFACE_IGNORE = "true" *) input cmos_rstn,//同步复位
(* X_INTERFACE_IGNORE = "true" *) input cmos_frame_ce,(* X_INTERFACE_IGNORE = "true" *) output dataout_frame_vsync,
(* X_INTERFACE_IGNORE = "true" *) output [23:0] dataout_frame_data,
(* X_INTERFACE_IGNORE = "true" *) output dataout_frame_href,
(* X_INTERFACE_IGNORE = "true" *) output dataout_frame_ce);// Y = 0.299R +0.587G + 0.114B// Y = (77 *R + 150*G + 29 *B)>>8reg [15:0] r_gray1;reg [15:0] g_gray1;reg [15:0] b_gray1;reg [15:0] y1;reg [7:0] y2;reg [2:0] dataout_frame_vsync_r;reg [2:0] dataout_frame_href_r;reg [2:0] dataout_frame_ce_r;always@(posedge cmos_frame_clk)beginif(!cmos_rstn)beginr_gray1 <= 8'h00;g_gray1 <= 8'h00;b_gray1 <= 8'h00;endelse beginr_gray1 <= cmos_frame_data[23:16] * 8'd77 ;g_gray1 <= cmos_frame_data[15:8] * 8'd150;b_gray1 <= cmos_frame_data[7:0] * 8'd29 ;endendalways@(posedge cmos_frame_clk)beginif(!cmos_rstn)beginy1 <= 16'h0000;endelse beginy1 <= r_gray1 + g_gray1 + b_gray1;endendalways@(posedge cmos_frame_clk)beginif(!cmos_rstn)beginy2 <= 8'h0000;endelse beginy2 <= y1[15:8];endendalways@(posedge cmos_frame_clk)beginif(!cmos_rstn)begindataout_frame_ce_r <= 3'b000;dataout_frame_vsync_r <= 3'b000;dataout_frame_href_r <= 3'b000;endelse begindataout_frame_ce_r <= {dataout_frame_ce_r[1:0] ,cmos_frame_ce};dataout_frame_vsync_r <= {dataout_frame_vsync_r[1:0] ,cmos_frame_vsync};dataout_frame_href_r <= {dataout_frame_href_r[1:0] ,cmos_frame_href};endendassign dataout_frame_data = {y2,y2,y2};assign dataout_frame_ce = dataout_frame_ce_r[2];assign dataout_frame_vsync = dataout_frame_vsync_r[2];assign dataout_frame_href = dataout_frame_href_r[2];endmoduleglobal_binary模块
负责根据阈值对灰度图像进行二值化处理
`timescale 1ns / 1ps
//作者:抢公主的大魔王
//功能:根据阈值对灰度图像进行二值化处理
//日期:24.5.5
//版本:1v0
//联系方式:2376635586@qq.com
module global_binary(
(* X_INTERFACE_IGNORE = "true" *) input datain_vsync,
(* X_INTERFACE_IGNORE = "true" *) input [23:0] datain,
(* X_INTERFACE_IGNORE = "true" *) input datain_href,(* X_INTERFACE_IGNORE = "true" *) input datain_clk,
(* X_INTERFACE_IGNORE = "true" *) input datain_rstn,//同步复位
(* X_INTERFACE_IGNORE = "true" *) input datain_frame_ce,(* X_INTERFACE_IGNORE = "true" *) input [7:0]threshold,(* X_INTERFACE_IGNORE = "true" *) output dataout_vsync,
(* X_INTERFACE_IGNORE = "true" *) output reg [23:0] dataout,
(* X_INTERFACE_IGNORE = "true" *) output dataout_vaild,(* X_INTERFACE_IGNORE = "true" *) output dataout_frame_ce);reg [1:0] dataout_vsync_r;
reg [1:0] dataout_valid_r;
reg [1:0] dataout_frame_ce_r;
always@(posedge datain_clk)beginif(!datain_rstn)dataout <= 24'hff_ff_ff;else if(datain[7:0]>=threshold)dataout <= 24'hff_ff_ff;elsedataout <= 24'h00_00_00;
end
always@(posedge datain_clk)beginif(!datain_rstn) begindataout_vsync_r <= 3'b000;dataout_valid_r <= 3'b000;dataout_frame_ce_r <= 3'b000;endelse begindataout_vsync_r <= {dataout_vsync_r[0] , datain_vsync};dataout_valid_r <= {dataout_valid_r[0] , datain_href};dataout_frame_ce_r <= {dataout_frame_ce_r[0] , datain_frame_ce};end
endassign dataout_vsync = dataout_vsync_r[1];
assign dataout_vaild = dataout_valid_r[1];
assign dataout_frame_ce = dataout_frame_ce_r[1];endmodule
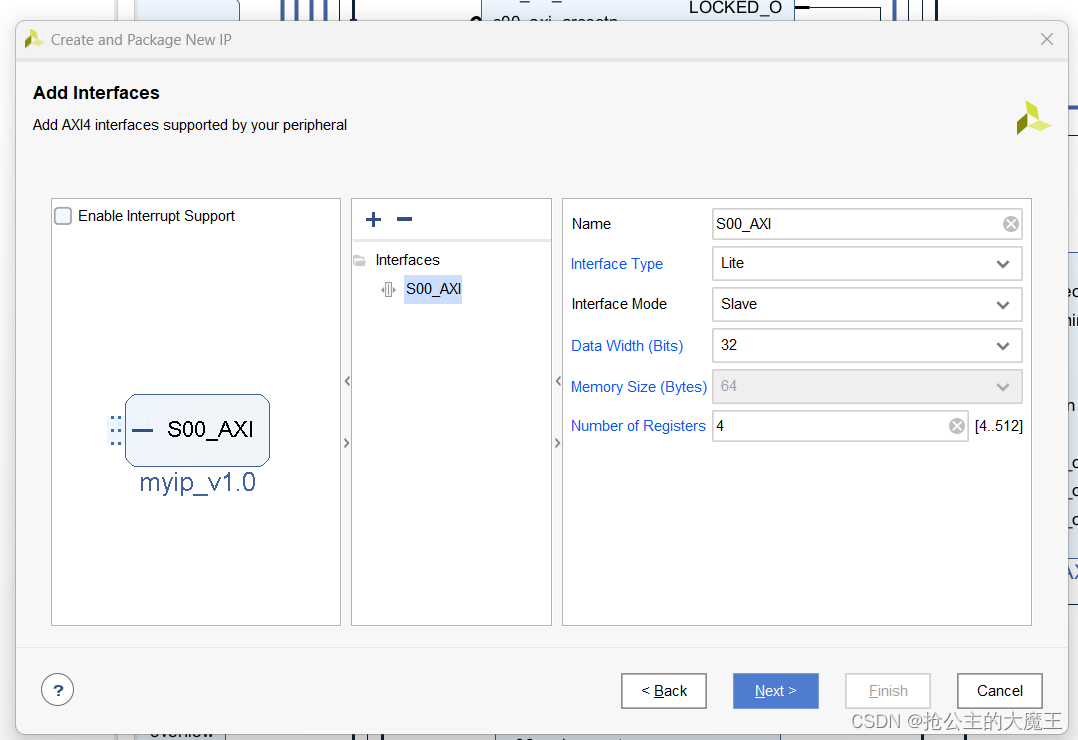
AXICtrlThreshold模块
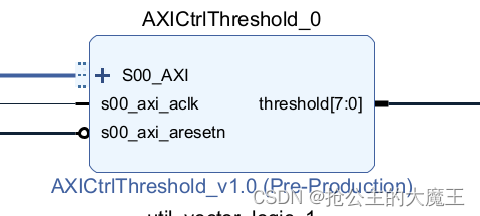
这个就是自己打包的标准的AXILite IP核,然后加了两句代码,一句是将threshold的0到7为连接到这个IP内部的第一个reg的低八位,另一句就是让这个reg复位是被复位为128,而不是0,因为我的图像阈值二值化算法的缺省阈值为128。
打包过程如下
下面要改名字和描述哦。
然后到了这个AXILite IP内部添加下面的代码
assign threshold = slv_reg0[7:0];
然后更改复位值
if ( S_AXI_ARESETN == 1'b0 )beginslv_reg0 <= 32'd128;slv_reg1 <= 0;slv_reg2 <= 0;slv_reg3 <= 0;end
最后把它output出去
output wire [7:0] threshold
IP代码本身,和她的top层都要output
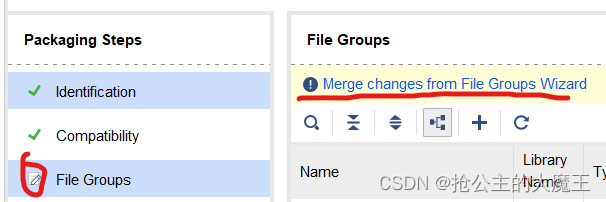
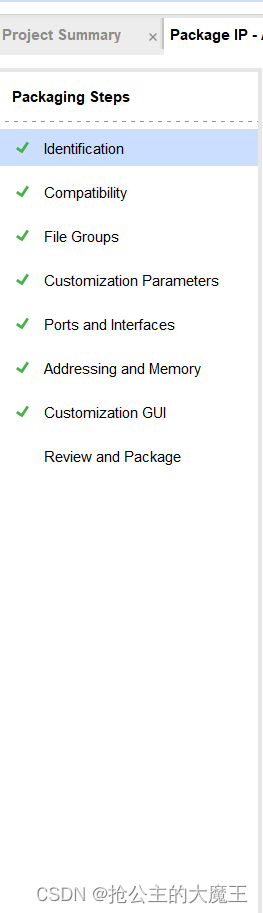
然后在这一栏,所有不是对号的要挨个点一遍,挨个更新一下,最后全是对号之后,就可以打包了。
vitis端代码
IntrHandler是中断回调函数,触发中断后会调用这个函数。
SetupInterruptSystem负责初始化中断,配置触发中断方式,使能中断。
Gpio_Init初始化GPIO,包括key1-5,led1-3和sccb总线(配置OV5640的)
binary_threshold就是我的图像阈值二值化的阈值啦,可以通过按键进行调整。
//作者:抢公主的大魔王
//功能:阈值可调的图像二值化
//日期:24.5.5
//版本:1v0
//联系方式:2376635586@qq.com
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "xil_types.h"
#include "xil_cache.h"
#include "xparameters.h"
#include "xgpiops.h"
#include "xscugic.h"
#include "xil_exception.h"
#include "xplatform_info.h"
#include "xaxivdma.h"
#include "xaxivdma_i.h"
#include "display_ctrl_hdmi/display_ctrl.h"
#include "vdma_api/vdma_api.h"
#include "emio_sccb_cfg/emio_sccb_cfg.h"
#include "ov5640/ov5640_init.h"
#include "sleep.h"//宏定义
#define DYNCLK_BASEADDR XPAR_AXI_DYNCLK_0_BASEADDR //动态时钟基地址
#define VDMA_ID XPAR_AXIVDMA_0_DEVICE_ID //VDMA器件ID
#define DISP_VTC_ID XPAR_VTC_0_DEVICE_ID //VTC器件ID
#define THRESHOLD_BASEADDR XPAR_AXICTRLTHRESHOLD_0_S00_AXI_BASEADDR#define EMIO_SCL_NUM 54
#define EMIO_SDA_NUM 55
#define KEY1 56 //T19
#define KEY2 57 //P19
#define KEY3 58 //U20
#define KEY4 59 //U19
#define KEY5 60 //V20
#define LED1 61 //H18
#define LED2 62 //K17
#define LED3 63 //E19#define GPIO_DEVICE_ID XPAR_XGPIOPS_0_DEVICE_ID
XGpioPs Gpio;
#define GPIO_BANK XGPIOPS_BANK0 /* Bank 0 of the GPIO Device */
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID
#define GPIO_INTERRUPT_ID XPAR_XGPIOPS_0_INTR//全局变量
//frame buffer的起始地址
unsigned int const frame_buffer_addr = (XPAR_PS7_DDR_0_S_AXI_BASEADDR+ 0x1000000);
u8 binary_threshold = 128;
XAxiVdma vdma;
DisplayCtrl dispCtrl;
VideoMode vd_mode;static XScuGic Intc; /* The Instance of the Interrupt Controller Driver */static void IntrHandler(void *CallBackRef, u32 Bank, u32 Status)
{XGpioPs *Gpio_cb = (XGpioPs *)CallBackRef;if (XGpioPs_IntrGetStatusPin(Gpio_cb, KEY1)){binary_threshold++;Xil_Out32(THRESHOLD_BASEADDR, binary_threshold);xil_printf("The threshold has been changed\n\rThe threshold now is %d\n\r",binary_threshold);XGpioPs_IntrClearPin(Gpio_cb, KEY1);}else if (XGpioPs_IntrGetStatusPin(Gpio_cb, KEY4)){binary_threshold--;Xil_Out32(THRESHOLD_BASEADDR, binary_threshold);xil_printf("The threshold has been changed\n\rThe threshold now is %d\n\r",binary_threshold);XGpioPs_IntrClearPin(Gpio_cb, KEY4);}else if (XGpioPs_IntrGetStatusPin(Gpio_cb, KEY2)){binary_threshold = binary_threshold+10;Xil_Out32(THRESHOLD_BASEADDR, binary_threshold);xil_printf("The threshold has been changed\n\rThe threshold now is %d\n\r",binary_threshold);XGpioPs_IntrClearPin(Gpio_cb, KEY2);}else if (XGpioPs_IntrGetStatusPin(Gpio_cb, KEY5)){binary_threshold = binary_threshold-10;Xil_Out32(THRESHOLD_BASEADDR, binary_threshold);xil_printf("The threshold has been changed\n\rThe threshold now is %d\n\r",binary_threshold);XGpioPs_IntrClearPin(Gpio_cb, KEY5);}else if (XGpioPs_IntrGetStatusPin(Gpio_cb, KEY3)){binary_threshold = 128;Xil_Out32(THRESHOLD_BASEADDR, binary_threshold);xil_printf("The threshold has been reset\n\rThe threshold now is %d\n\r",binary_threshold);XGpioPs_IntrClearPin(Gpio_cb, KEY3);}XGpioPs_WritePin(&Gpio, LED1, !XGpioPs_ReadPin(&Gpio, LED1));
}void SetupInterruptSystem(XScuGic *GicInstancePtr, XGpioPs *Gpio,u16 GpioIntrId){XScuGic_Config *IntcConfig;Xil_ExceptionInit();IntcConfig = XScuGic_LookupConfig(INTC_DEVICE_ID);XScuGic_CfgInitialize(GicInstancePtr, IntcConfig,IntcConfig->CpuBaseAddress);Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,(Xil_ExceptionHandler)XScuGic_InterruptHandler,GicInstancePtr);XScuGic_Connect(GicInstancePtr, GpioIntrId,(Xil_ExceptionHandler)IntrHandler,(void *)Gpio);XScuGic_Enable(GicInstancePtr, GpioIntrId);XGpioPs_SetIntrTypePin(Gpio, KEY1, XGPIOPS_IRQ_TYPE_EDGE_FALLING);XGpioPs_SetIntrTypePin(Gpio, KEY2, XGPIOPS_IRQ_TYPE_EDGE_FALLING);XGpioPs_SetIntrTypePin(Gpio, KEY3, XGPIOPS_IRQ_TYPE_EDGE_FALLING);XGpioPs_SetIntrTypePin(Gpio, KEY4, XGPIOPS_IRQ_TYPE_EDGE_FALLING);XGpioPs_SetIntrTypePin(Gpio, KEY5, XGPIOPS_IRQ_TYPE_EDGE_FALLING);XGpioPs_IntrEnablePin(Gpio, KEY1);XGpioPs_IntrEnablePin(Gpio, KEY2);XGpioPs_IntrEnablePin(Gpio, KEY3);XGpioPs_IntrEnablePin(Gpio, KEY4);XGpioPs_IntrEnablePin(Gpio, KEY5);Xil_ExceptionEnableMask(XIL_EXCEPTION_IRQ);
}void Gpio_Init(void){XGpioPs_Config *ConfigPtr;ConfigPtr = XGpioPs_LookupConfig(GPIO_DEVICE_ID);XGpioPs_CfgInitialize(&Gpio, ConfigPtr,ConfigPtr->BaseAddr);XGpioPs_SetDirectionPin(&Gpio, LED1, 1);XGpioPs_SetOutputEnablePin(&Gpio, LED1, 1);XGpioPs_WritePin(&Gpio, LED1, 0);XGpioPs_SetDirectionPin(&Gpio, LED2, 1);XGpioPs_SetOutputEnablePin(&Gpio, LED2, 1);XGpioPs_WritePin(&Gpio, LED2, 0);XGpioPs_SetDirectionPin(&Gpio, LED3, 1);XGpioPs_SetOutputEnablePin(&Gpio, LED3, 1);XGpioPs_WritePin(&Gpio, LED3, 0);XGpioPs_SetDirectionPin(&Gpio, KEY1, 0);XGpioPs_SetDirectionPin(&Gpio, KEY2, 0);XGpioPs_SetDirectionPin(&Gpio, KEY3, 0);XGpioPs_SetDirectionPin(&Gpio, KEY4, 0);XGpioPs_SetDirectionPin(&Gpio, KEY5, 0);SetupInterruptSystem(&Intc, &Gpio, GPIO_INTERRUPT_ID);}int main(void)
{u32 status;u16 cmos_h_pixel; //ov5640 DVP 输出水平像素点数u16 cmos_v_pixel; //ov5640 DVP 输出垂直像素点数u16 total_h_pixel; //ov5640 水平总像素大小u16 total_v_pixel; //ov5640 垂直总像素大小cmos_h_pixel = 1280;cmos_v_pixel = 720;total_h_pixel = 2570;total_v_pixel = 980;emio_init();status = ov5640_init( cmos_h_pixel, //初始化ov5640cmos_v_pixel,total_h_pixel,total_v_pixel);//设置OV5640输出分辨率为1280*720 PCLK = 72Mhzif(status == 0)xil_printf("OV5640 detected successful!\r\n");elsexil_printf("OV5640 detected failed!\r\n");vd_mode = VMODE_1280x720;//配置VDMArun_vdma_frame_buffer(&vdma, VDMA_ID, vd_mode.width, vd_mode.height,frame_buffer_addr,0,0,BOTH);//初始化Display controllerDisplayInitialize(&dispCtrl, DISP_VTC_ID, DYNCLK_BASEADDR);//设置VideoModeDisplaySetMode(&dispCtrl, &vd_mode);DisplayStart(&dispCtrl);Gpio_Init();while(1){XGpioPs_WritePin(&Gpio, LED3, !XGpioPs_ReadPin(&Gpio, LED3));sleep(1);}return 0;
}相关文章:
基于EBAZ4205矿板的图像处理:12图像二值化(阈值可调)
基于EBAZ4205矿板的图像处理:12图像二值化(阈值可调) 我的项目是基于EBAZ4205矿板的阈值可调的图像阈值二值化处理,可以通过按键调整二值化的阈值,key1为阈值加1,key4为阈值减1,key2为阈值加10,key5为阈值…...

人大金仓数据库报com.kingbase8.util.KSQLException: 致命错误: 用户 “SYSTEM“ Password 认证失败
com.kingbase8.util.KSQLException: 致命错误: 用户 “SYSTEM” Password 认证失败 解决办法: 问题在于用户权限只不足,相关配置文件在一般在 /data/sys hba.conf,修改IPV4 local connections选项中的改为trust。...
文件加密软件哪个好?文件加密软件排行榜前十名(好用软件推荐)
文件加密软件哪个好?这是许多个人和企业用户在面临数据保护需求时所关心的问题。随着数字化时代的推进,数据安全问题日益凸显,文件加密软件成为了保护数据安全的重要手段。本文将为您介绍当前市场上排名前十的文件加密软件,帮助您…...
Netty的第一个简单Demo实现
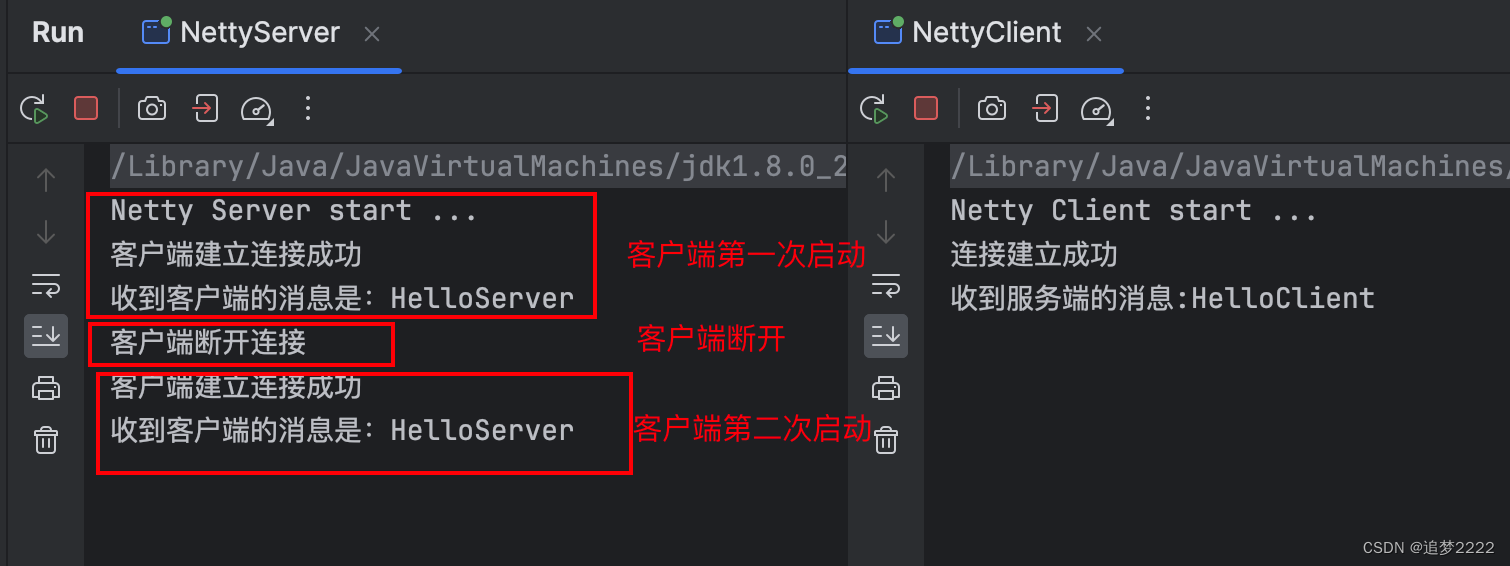
目录 说明需求ClientServer写法总结 实现运行 说明 Netty 的一个练习,使用 Netty 连通 服务端 和 客户端,进行基本的通信。 需求 Client 连接服务端成功后,打印连接成功给服务端发送消息HelloServer Server 客户端连接成功后࿰…...
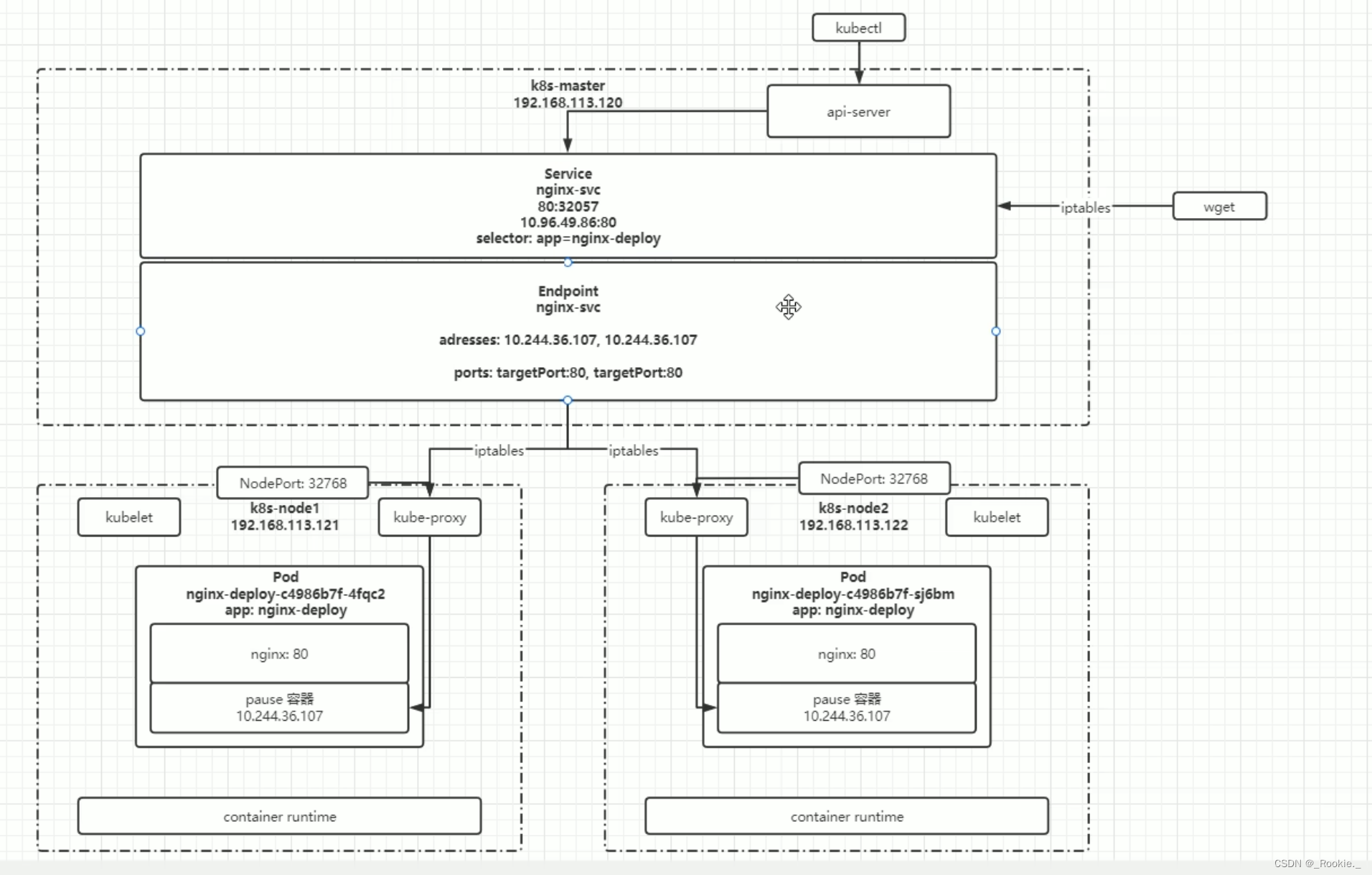
K8S 哲学 - 服务发现 services
apiVersion: v1 kind: Service metadata:name: deploy-servicelabels:app: deploy-service spec: ports: - port: 80targetPort: 80name: deploy-service-podselector: app: deploy-podtype: NodePort service 的 endPoint (ep) 主机端口分配方式 两…...

Springboot工程创建
目录 一、步骤 二、遇到的问题及解决方案 一、步骤 打开idea,点击文件 ->新建 ->新模块 选择Spring Initializr,并设置相关信息。其中组为域名,如果没有公司,可以默认com.example。点击下一步 蓝色方框部分需要去掉,软件包…...

日本站群服务器的优点以及适合该服务器的业务类型?
日本站群服务器的优点以及适合该服务器的业务类型? 日本站群服务器是指位于日本地区的多个网站共享同一台服务器的架构。这种服务器架构有着诸多优点,使其成为许多企业和网站管理员的首选。以下是日本站群服务器的优点以及适合该服务器的业务类型的分析࿱…...

堆的应用2——TOPK问题
TOPK问题 TOP-K问题:即求数据结合中前K个最大的元素或者最小的元素,一般情况下数据量都比较大。 比如:专业前10名、世界500强、富豪榜、游戏中前100的活跃玩家等。 情况1——数据量小 对于Top-K问题,能想到的最简单直接的方式就…...

leetcode-5. 最长回文子串
题目描述 给你一个字符串 s,找到 s 中最长的回文子串。 如果字符串的反序与原始字符串相同,则该字符串称为回文字符串。 示例 1: 输入:s "babad" 输出:"bab" 解释:"aba"…...

【Flask 系统教程 1】入门及配置
当你开始学习 Flask 时,了解如何进行基本的配置是非常重要的。Flask 是一个简单而灵活的 Python Web 框架,它允许你快速构建 Web 应用程序,并且易于学习。在这篇博客中,我将介绍如何从零开始进行 Flask 的基础配置,适合…...

石家庄河北银行的
有些时候河北石家庄这边的甲方客户人员就是太苛刻了,尤其是银行业 比如河北银行的信息部的卢斌,兰州人,这个人的人品极度恶劣,对乙方的外包人员特别苛刻,像个大爷一样。自己什么都不会,连sql 都不会写&…...
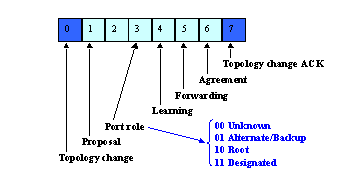
【CCNP ENCOR OCG】CHAPTER 2》Spanning Tree Protocol
目录 “Do I Know This Already?” Quiz Foundation Topics Spanning Tree Protocol Fundamentals 802.1D Port States Spanning Tree Path Cost Root Bridge Election Locating Root Ports Locating Blocked Designated Switch Ports Verification of VLANs on Trun…...

docker无法映射/挂载根目录
docker无法映射(挂载)根目录下的文件夹只能映射家目录 最近想要使用nas-tools做做刮削,电影存在一个机械磁盘里,机械磁盘被挂载到/data1下,发现一个很奇怪的问题,docker只能挂载成功home目录下的文件夹&am…...

C++中不要重新定义继承而来的non-virtual函数
在 C 中,重定义继承而来的 non-virtual(非虚)函数通常是不推荐的,原因如下: 隐藏父类的实现:如果在派生类中重定义了一个非虚函数,这将隐藏父类中具有相同名称和参数的函数。这意味着即使通过基…...
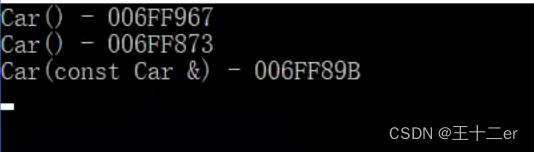
C++ 对象型参数和返回值
对象型参数和返回值 1.对象型类型作为函数的参数2.对象型参数作为函数的返回值 1.对象型类型作为函数的参数 使用对象类型作为函数的参数或者返回值,可能会产生一些不必要的中间对象 例子: // 使用对象类型作为函数的参数 void test1(Car car) {}完整代…...

LeetCode 字符串专题——KMP算法_28. 找出字符串中第一个匹配项的下标
字符串专题——KMP算法 KMP算法例题 KMP算法 待更新 例题 https://leetcode.cn/problems/find-the-index-of-the-first-occurrence-in-a-string/description/ class Solution {vector<int> next;void getNext(string s){int j-1;next[0]-1;int lens.size();for(int i…...

上班不想用脑子写代码了怎么办?那就试试Baidu Comate啊宝贝
本文目录 前言1、视频编程实战1.1、熟悉代码库中的代码1.2、参考现有代码编写新代码 2、下载使用教程3、使用体验3.1、AutoWork 产品测评3.2、解决有关ajax请求后重定向问题3.3、询问编程相关知识3.3.1、cookie和session的区别与联系3.3.2、数据库中主键外键的相关知识 4、问题…...

【管理咨询宝藏94】某国际咨询公司供应链财务数字化转型方案
本报告首发于公号“管理咨询宝藏”,如需阅读完整版报告内容,请查阅公号“管理咨询宝藏”。 【管理咨询宝藏94】某国际咨询公司供应链&财务数字化转型方案 【格式】PDF版本 【关键词】国际咨询公司、制造型企业转型、数字化转型 【核心观点】 - 172…...
实现有向图[完整示例及解释])
C++_使用邻接表(链表-指针)实现有向图[完整示例及解释]
这个程序是一个图的实现,使用邻接表来表示图的结构: 1. 结构定义部分: - AdjListNode 结构定义了邻接表中的节点,每个节点包含一个名称和一个指向下一个邻接节点的指针。 - Node 结构定义了图中的节点,每个节点…...
Gitlab自动化测试的配置
1. 代码分支命名规范检测 Setting → Repository → Push rules → Branch name,添加分支命名规范对应的正则表达式。如: ^(Release|Tag|Develop|Feature)_._.|Main$ 表示分支名只能以以下关键字之一开头:Release、Tag、Develop和Feature。 …...

基于视觉大模型的桌面自动化:Screen Vision技能实现AI操控电脑
1. 项目概述:让AI成为你的“数字双手” 你有没有想过,有一天你可以像指挥一个真人助手一样,用自然语言告诉AI:“帮我把桌面上的那个PDF文件拖到‘已处理’文件夹里”,或者“打开浏览器,搜索一下今天北京的…...

30分钟从零到精通:Czkawka Windows文件清理完全手册
30分钟从零到精通:Czkawka Windows文件清理完全手册 【免费下载链接】czkawka Multi functional app to find duplicates, empty folders, similar images etc. 项目地址: https://gitcode.com/GitHub_Trending/cz/czkawka Czkawka是一款功能强大的开源文件清…...
)
【限时解禁】Google I/O 2024未发布的Gemini Android Enterprise Integration白皮书核心章节(仅剩37份授权访问码)
更多请点击: https://intelliparadigm.com 第一章:Gemini Android深度整合的战略定位与演进脉络 Google 将 Gemini 模型深度嵌入 Android 生态,并非单纯叠加 AI 功能,而是重构操作系统级智能代理的交互范式。其战略内核在于将大模…...

多模型 API 聚合如何赋能智能体实现更复杂的决策与调度
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 多模型 API 聚合如何赋能智能体实现更复杂的决策与调度 在构建高级智能体系统时,单一的模型提供商往往难以满足所有场景…...

在模型广场根据任务需求与预算快速筛选合适的大模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在模型广场根据任务需求与预算快速筛选合适的大模型 对于开发者而言,面对市场上众多的大模型,如何快速找到…...

STATA CLI:我把 Stata 接进了命令行,也接进了 AI 工作流
为什么要做这个工具 我写 stata-cli,不是因为想再造一个 Stata,也不是因为命令行天然高级,而是因为 Stata 明明是很多实证研究者最熟悉的工具,却一直很难进入现代自动化工作流。 做计量、做实证、做政策评估的人都知道,…...

2026浏览器插件指纹溯源机制与插件环境安全优化实战指南
一、前言:插件特征成为批量虚拟环境识别的新型突破口在矩阵运营行业精细化风控对抗背景下,UA 修改、IP 切换、基础指纹伪装已经成为行业标配操作,平台逐渐放弃基础参数检测,转向高隐蔽、高区分度、极易被忽略的插件指纹进行设备识…...

AI编程助手与代码质量守护:Trunk Cursor插件实战指南
1. 项目概述:当AI编程助手遇上代码质量守护者如果你和我一样,日常重度依赖Cursor这类AI编程助手来加速开发,那么你一定也遇到过类似的困扰:AI生成的代码片段虽然功能上“能用”,但在代码风格、格式一致性、甚至是潜在的…...

【Claude API集成实战指南】:20年专家亲授FastAPI高效对接Claude的7大避坑法则
更多请点击: https://intelliparadigm.com 第一章:Claude API集成的核心原理与FastAPI技术选型 Claude API 采用基于 HTTP/2 的流式 REST 接口设计,核心通信模式为双向流(/v1/messages 端点),支持 event:…...

智能图像去重引擎:解放数字存储空间的完整解决方案
智能图像去重引擎:解放数字存储空间的完整解决方案 【免费下载链接】AntiDupl A program to search similar and defect pictures on the disk 项目地址: https://gitcode.com/gh_mirrors/an/AntiDupl 在数字内容爆炸的时代,重复图片问题已成为技…...