车辆运动模型中LQR代码实现
一、前言
最近看到关于架构和算法两者关系的一个描述,我觉得非常认同,分享给大家。
1、好架构起到两个作用:合理的分解功能、合理的适配算法;
2、好的架构是好的功能的必要条件,不是充分条件,一味追求架构的完美是不可取的,并且不存在完美的架构,只存在合适的架构;
3、好的架构可以一定层度上提升算法的能力,但功能开发不能将重心全放在框架上,应该追求框架+算法的适配,从而实现 1+1 > 2 。
**我的理解是这样的:**架构的设计一定要结合功能、硬件、人力、成本、时间等多种因素,在此基础上尽量去满足算法的低耦合、高内聚。
二、LQR跟踪效果视频
说明:LQR跟踪比较依赖路径的平滑度(路径曲率的变化)
LQR路径跟踪
三、车辆运动学模型的详细推导
上一篇文章中(LQR原理及其在路径跟踪的应用,http://t.csdnimg.cn/4YDos),有人私信问关于车辆运动学模型的推导过程,这里我进行更详细的推导


到这里就应该没什么问题了吧?再通过向前欧拉法离散化,套公式即可求解;
四、差速模型的详细推导
其一:为了举一反三,所有对差速模型也进行了推导;
其二:即使控制对象是车辆模型,也可以先使用差速模型先进行计算得到v,w,然后根据车辆的模型二次解算得到速度和转向角。

五、具体代码实现
注意事项:
1、使用lqr跟踪一段轨迹,轨迹中的v,w不知道的情况下可以给0,但那么lqr中的调节矩阵R就应该尽量的小;
2、轨迹中的yaw尽量保证突变较小(没有前置轨迹平滑的基础可以简单用均值滤波),否则lqr无法收敛,跟踪效果很差;
3、以差速模型计算得到v,w ,可以再车辆的模型二次解算得到速度和转向角。
/*** lqr_controler.hpp* @brief lqr控制器 构建的是一个差速机器人模型* @author MCE* @date 2024-5-9*/
#ifndef LQR_CONTROLER
#define LQR_CONTROLER
#include <math.h>
#include <Eigen/Dense>
#include <iostream>
#include "utils.hpp"
namespace lqr_control {
using namespace std;
using namespace Eigen;
using namespace lqr_control;class LQRControler {
public:LQRControler(){};/*** @brief lqr 初始化* @return void*/void init();/*** @brief lqr 控制器 输出 v, w* @param robot_state 机器人状态* @param front_point 预瞄点* @param v 以引用的方式输出v* @param w 以引用的方式输出w* @return void*/void lqrControl(const state& robot_state, const state& front_point, float& v, float& w);private:MatrixXf A;MatrixXf B;MatrixXf Q;MatrixXf R;// P矩阵最多迭代次数int n;// 离散化控制周期float dt;// P容许误差float eps;/*** @brief 黎卡迪计算方程* @return MatrixXf P矩阵*/MatrixXf calRicatti();/*** @brief 计算AB 矩阵* @return void*/void calAB(const state& front_point);
};
} // namespace lqr_control
#endif
/*** lqr_controler.cpp* @brief lqr控制器* @author MCE* @date 2024-5-9*/
#include "../include/lqr_controler.hpp"namespace lqr_control {void LQRControler::init() {A.resize(3, 3);A.setZero();B.resize(3, 2);B.setZero();Q.resize(3, 3);Q << 1.0, 0.0, 0.0,0.0, 1.0, 0.0, 0.0, 0.0, 1.0; R.resize(2, 2);R << 0.001, 0.0, 0.0, 0.001; n = 100;dt = 0.02;eps = 1.0e-4;
}void LQRControler::calAB(const state& front_point) {A << 1.0, 0.0, -front_point.linear_vel * dt * sin(front_point.yaw), 0.0, 1.0, front_point.linear_vel * dt * cos(front_point.yaw), 0.0, 0.0, 1.0;B << dt * cos(front_point.yaw), 0.0, dt * sin(front_point.yaw), 0.0, 0.0, dt;
}// 离散时间Riccati方程求解函数
MatrixXf LQRControler::calRicatti() {MatrixXf P = Q;for (int i = 0; i < n; ++i) {MatrixXf P_next = A.transpose() * P * A - A.transpose() * P * B * (R + B.transpose() * P * B).inverse() * B.transpose() * P * A + Q;if ((P_next - P).norm() < eps) {P = P_next;break;}P = P_next;}return P;
}void LQRControler::lqrControl(const state& robot_state, const state& front_point, float& v, float& w) {MatrixXf X(3, 1);X << robot_state.x - front_point.x, robot_state.y - front_point.y, angleNormalize(robot_state.yaw - front_point.yaw);calAB(front_point);MatrixXf P = calRicatti();MatrixXf K = -(R + B.transpose() * P * B).inverse() * B.transpose() * P * A;MatrixXf U = K * X;v = U(0, 0);w = U(1, 0);
}
} // namespace lqr_control
欢迎大家讨论、交流!
相关文章:
车辆运动模型中LQR代码实现
一、前言 最近看到关于架构和算法两者关系的一个描述,我觉得非常认同,分享给大家。 1、好架构起到两个作用:合理的分解功能、合理的适配算法; 2、好的架构是好的功能的必要条件,不是充分条件,一味追求架构…...

Springboot集成feign远程调用
需求:在leadnews-wemedia微服务里需要调用leadnews-article微服务的接口。新建一个支持feign调用的名为heima-leadnews-feign-api的模块 heima-leadnews-feign-api的pom文件里导入openfeign依赖 <dependency><groupId>org.springframework.cloud</g…...

构建NFS远程共享存储
nfs-server:10.1.59.237 nfs-web:10..159.218 centos7,服务端和客户端都关闭防火墙和selinux内核防火墙,如果公司要求开启防火墙,那需要放行几个端口 firewall-cmd --add-port2049/tcp --permanent firewall-cmd --add-port111/tcp --permanent firew…...
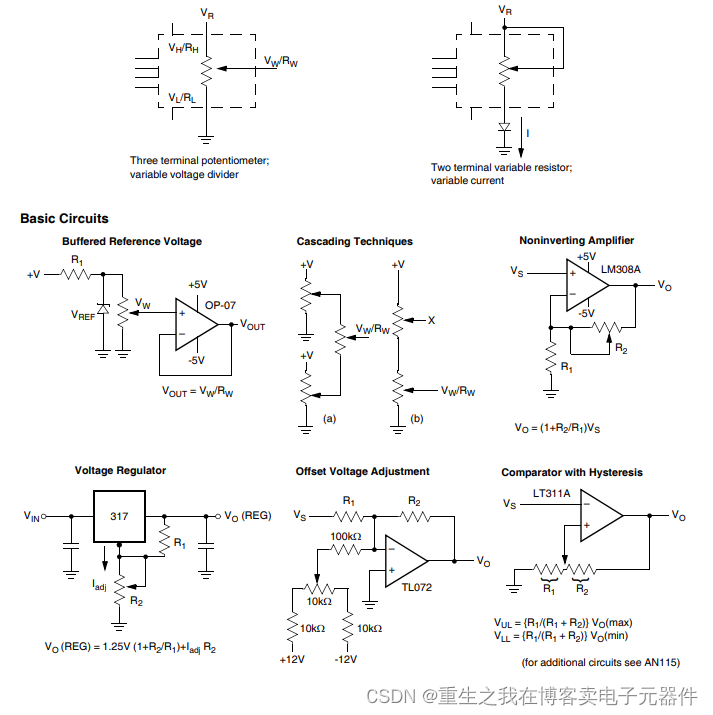
X9C103SIZT1 数字电位计 IC 10K SOIC-8 参数 应用案例
X9C103SIZT1 是一款数字电位器,属于 X9C103 系列。它是一款100抽头的非易失性数字电位器,阻值为 10 kOhm,封装形式为 SOIC-8。这款器件常用于需要调整电子设备阻值的应用中,如音频设备、电源管理以及传感器校准等。 X9C103SIZT1 的…...
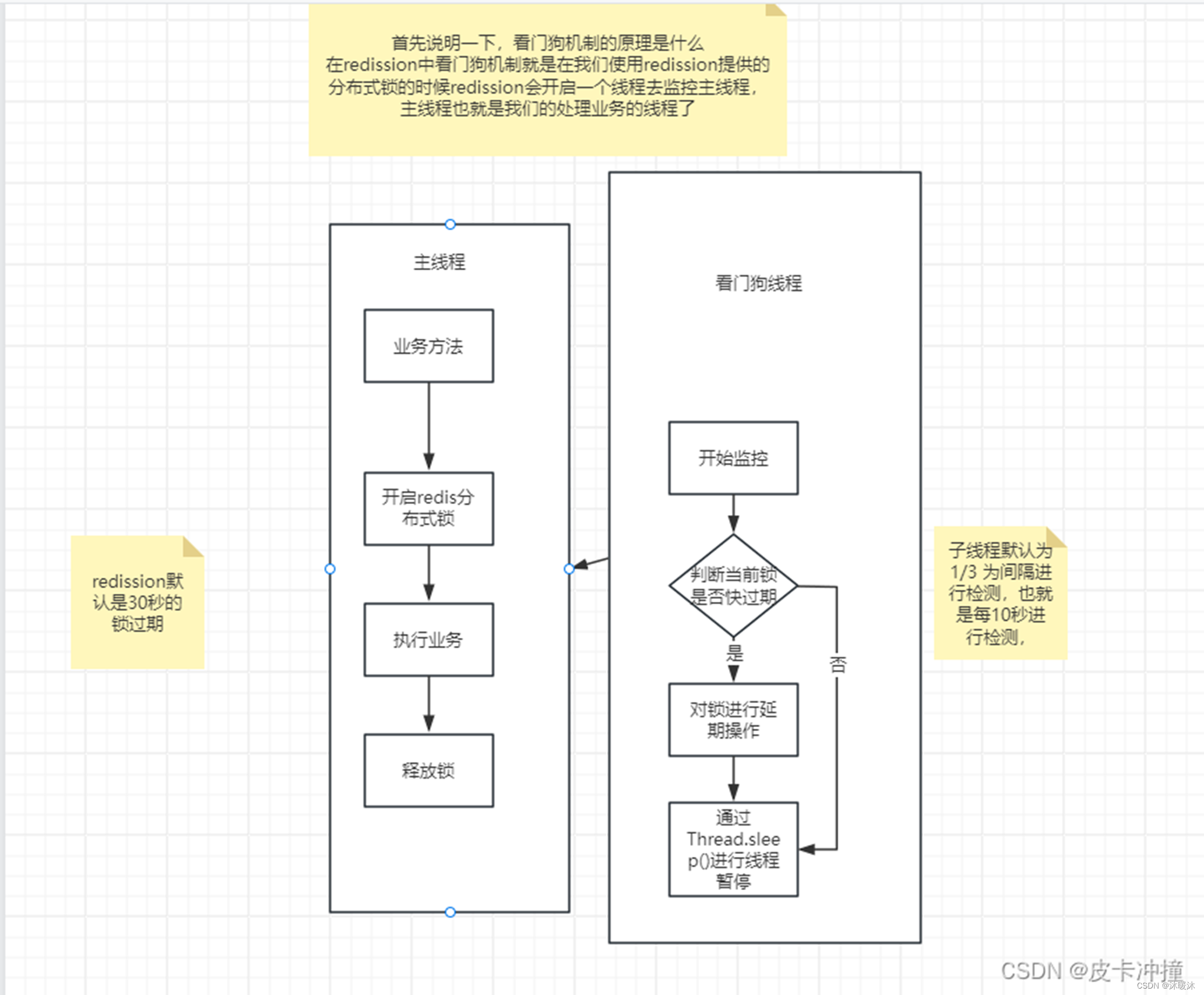
redis深入理解之数据存储
1、redis为什么快 1)Redis是单线程执行,在执行时顺序执行 redis单线程主要是指Redis的网络IO和键值对读写是由一个线程来完成的,Redis在处理客户端的请求时包括获取(socket 读)、解析、执行、内容返回 (socket 写)等都由一个顺序串行的主线…...

用20行python写一个最简单的网站
先安装flask框架,cmd命令行 pip install flask,或pycharm -> setting -> project -> python interpreter 搜索安装 # 引入Flask框架 from flask import Flask# 实例化Flask应用 app Flask(__name__)# 定义一个路由,当用户访问网站…...

零基础入门篇①③ Python可变序列类型--列表
Python从入门到精通系列专栏面向零基础以及需要进阶的读者倾心打造,9.9元订阅即可享受付费专栏权益,一个专栏带你吃透Python,专栏分为零基础入门篇、模块篇、网络爬虫篇、Web开发篇、办公自动化篇、数据分析篇…学习不断,持续更新,火热订阅中🔥专栏限时一个月(5.8~6.8)重…...

微服务项目 - SpringBoot 2.x 升级到 SpringBoot 3.2.5,保姆级避坑
目录 一、前言 二、取经之路 2.1、依赖版本情况 2.2、MyBatis-Plus 依赖改变...
【2024亚马逊云科技峰会】Amazon Bedrock + Llama3 生成式AI实践
在 4 月 18 日,Meta在官网上公布了旗下最新大模型Llama 3。目前,Llama 3已经开放了80亿(8B)和700亿(70B)两个小参数版本,上下文窗口为8k,据称,通过使用更高质量的训练数据…...

ApacheCordova 12 +Vs 2022 项目搭建教程_开发环境搭建教程
一、安装 cordova cli 并使用命令创建项目 npm install –g cordova 详细参考: Apache Cordova开发环境搭建(二)VS Code_天马3798-CSDN博客_cordova vscode 二、 Vs 2022 Android 开发搭建+调试 .Net MAUI 搭建Android 开发环境-CSDN博客 三、配置 JDK 环境变量、配置…...

地磁暴红色预警来袭,普通人该如何应对?绝绝子的防护指南来了
近日,国家空间天气监测预警中心发布了一则令人瞩目的消息——地磁暴红色预警。这一预警不仅提醒我们地磁暴即将影响我国的电离层和低轨卫星,更让我们深刻认识到地球空间环境的脆弱性和复杂性。对于普通公众而言,地磁暴的概念可能相对陌生&…...
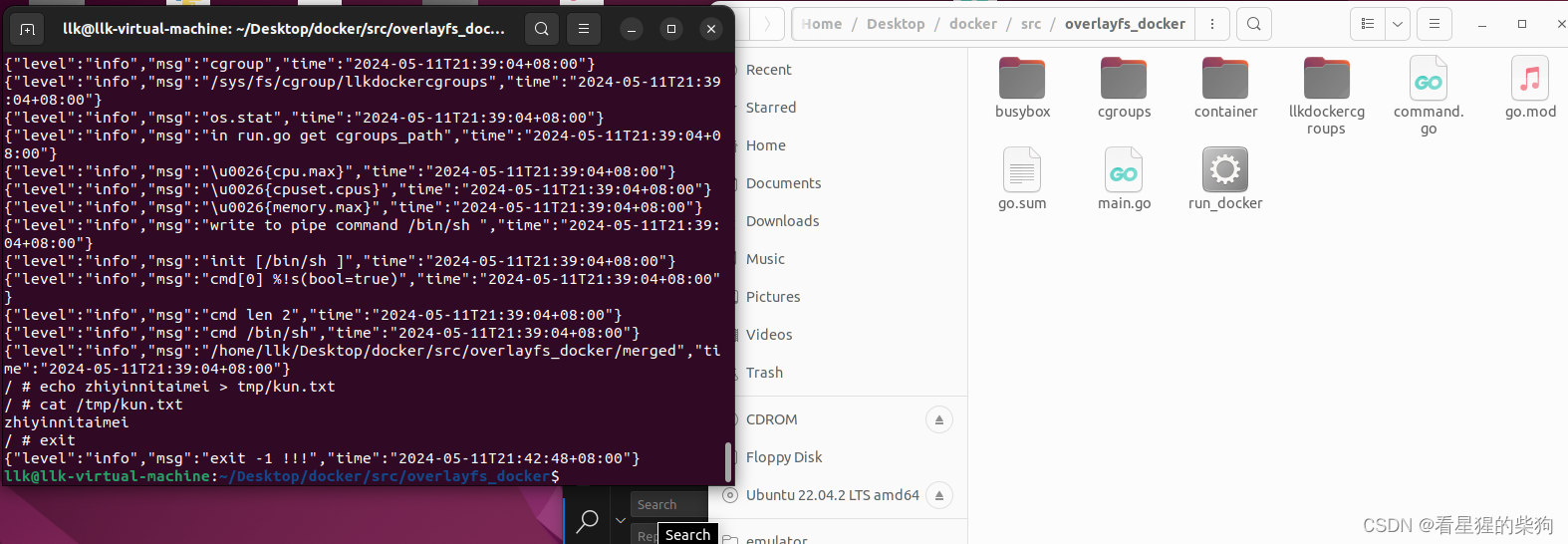
从零自制docker-12-【overlayfs】
文章目录 overlayfsexec.Command("tar", "-xvf", busyboxTarURL, "-C", busyboxURL).CombinedOutput()exec.Command格式差异 挂载mount卸载unmount代码地址结果演示 overlayfs 就是联合文件系统,将多个文件联合在一起成为一个统一的…...

凸优化理论学习一|最优化及凸集的基本概念
文章目录 一、优化问题(一)数学优化(二)凸优化 二、凸集(一)一些标准凸集(二)保留凸性的运算(三)正常锥和广义不等式(四)分离和支撑超…...
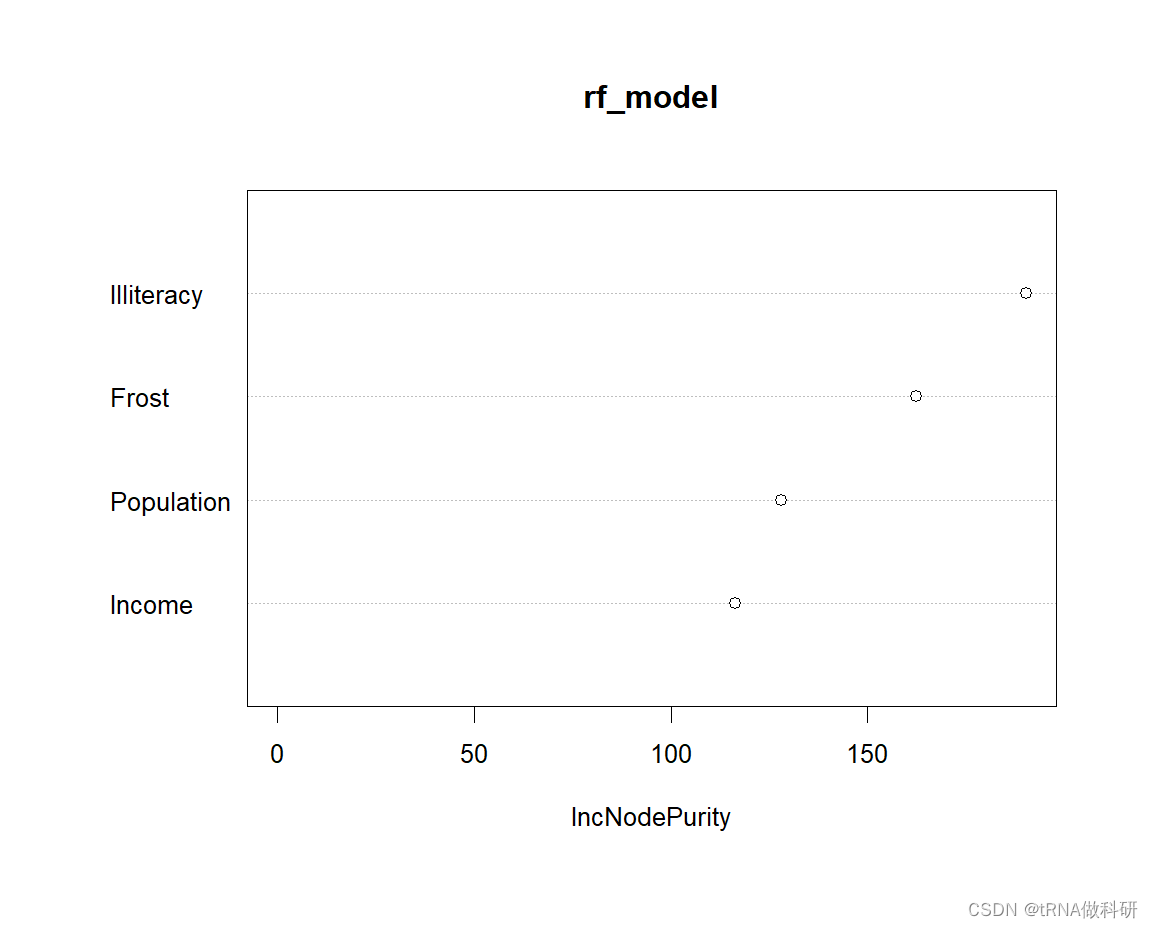
【R语言从0到精通】-4-回归建模
通过之前的文章,我们已经基本掌握了R语言的基本使用方法,那从本次教程开始,我们开始聚焦如何使用R语言进行回归建模。 4.1 回归简介 回归分析是一种统计学方法,用于研究两个或多个变量之间的相互关系和依赖程度。它可以帮助我们了…...
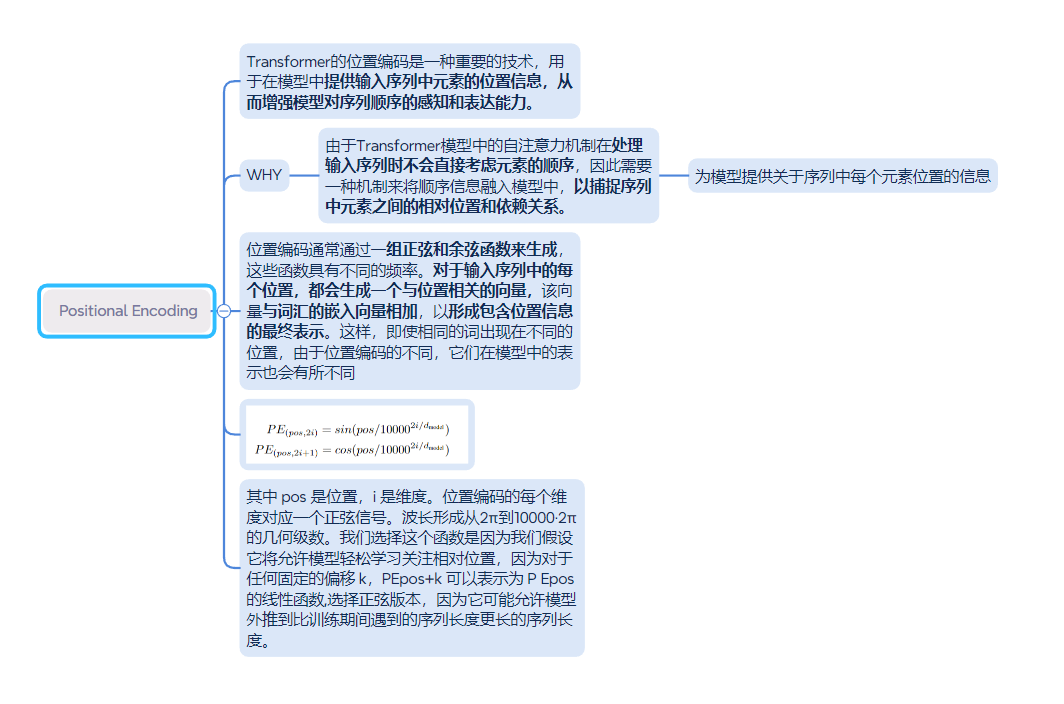
论文 学习 Transformer : Attention Is All You Need
目录 概述: 对摘要的理解: 框架解析 按比例缩放的点积注意力 多头注意力机制 前馈神经网络与位置编码 概述: transformer 是一个encoder ——decoder 结构的用于处理序列到序列转换任务的框架,是第一个完全依赖自注意力机制…...

工厂模式+策略模式
输入实体 基类 import lombok.Data;Data public class PersonInputDto {private Integer id;private String name; }子类 Data AllArgsConstructor NoArgsConstructor public class ManPerson extends PersonInputDto {private String sex; }Data AllArgsConstructor NoArgs…...
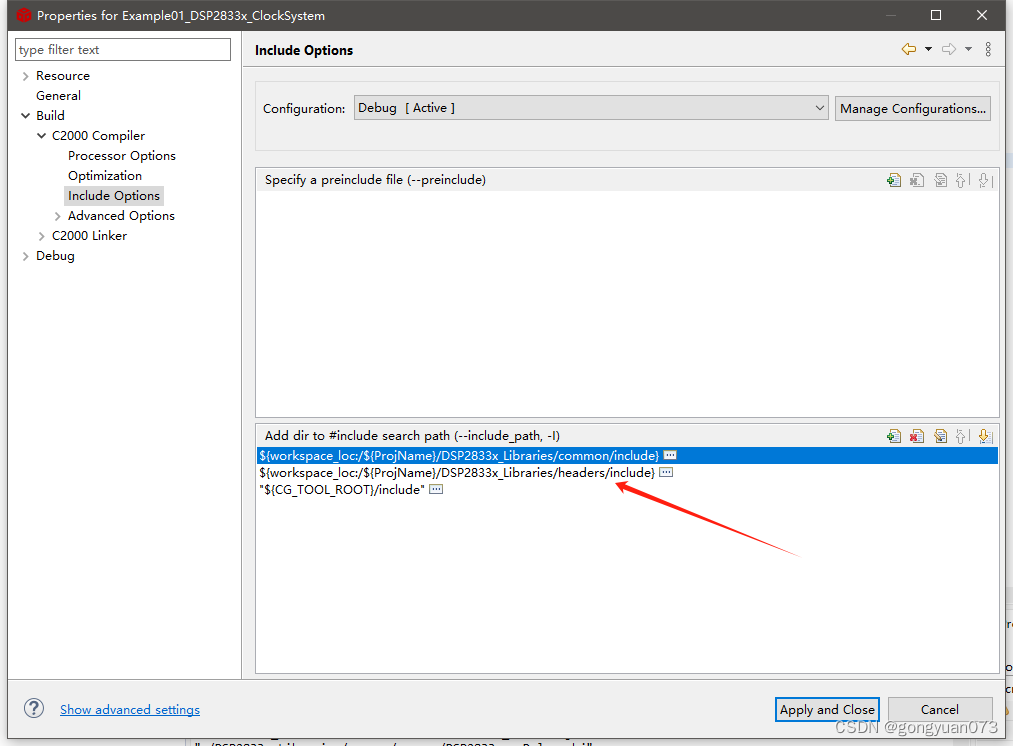
TMS320F28335学习笔记-时钟系统
第一次使用38225使用了普中的clocksystem例程进行编译,总是编译失败。 问题一:提示找不到文件 因为工程的头文件路径没有包含,下图的路径需要添加自己电脑的路径。 问题二 找不到库文件 例程种的header文件夹和common文件夹不知道从何而来…...

【Apache POI】Apache POI-操作Excel表格-简易版
Catalog Apache POI-操作Excel表格1. 需求2. 优点3. 缺点4. 应用场景5. 使用方法6. SpringBoot工程中处理Excel表格7. Demo示例 Apache POI-操作Excel表格 1. 需求 大多数项目的在运营过程中,会产生运营数据,如外卖系统中需要统计每日的订单完成数、每…...

MySQL系列之索引
🌹作者主页:青花锁 🌹简介:Java领域优质创作者🏆、Java微服务架构公号作者😄 🌹简历模板、学习资料、面试题库、技术互助 🌹文末获取联系方式 📝 往期热门专栏回顾 专栏…...

【问题分析】锁屏界面调起google语音助手后壁纸不可见【Android 14】
1 问题描述 为系统和锁屏分别设置两张不同的壁纸,然后在锁屏界面长按Power调起google语音助手后,有时候会出现壁纸不可见的情况,如以下截图所示: 有的时候又是正常的,但显示的也是系统壁纸,并非是锁屏壁纸…...
)
从零到上手:用LDAP Browser连接和管理你的OpenLDAP服务器(Windows平台实战)
从零到上手:用LDAP Browser连接和管理你的OpenLDAP服务器(Windows平台实战) 在企业级身份认证体系中,LDAP(轻量级目录访问协议)扮演着核心角色。许多技术团队虽然已经部署了OpenLDAP服务端,却苦…...
)
可口可乐AI印相私密工作流首次公开(含内部CMYK预置包、罐体反光建模提示词库与印刷出血校准表)
更多请点击: https://intelliparadigm.com 第一章:可口可乐AI印相私密工作流的起源与战略价值 可口可乐AI印相私密工作流并非源于通用大模型的简单套用,而是其全球数字创新实验室在2022年启动的“Project Chroma”中孵化出的端到端隐私增强…...

终极智能修复:VisualCppRedist AIO一键解决Windows软件兼容性问题 [特殊字符]
终极智能修复:VisualCppRedist AIO一键解决Windows软件兼容性问题 😊 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 还在为软件打不开、…...

如何轻松解密Widevine加密视频:完整免费指南
如何轻松解密Widevine加密视频:完整免费指南 【免费下载链接】video_decrypter Decrypt video from a streaming site with MPEG-DASH Widevine DRM encryption. 项目地址: https://gitcode.com/gh_mirrors/vi/video_decrypter 还在为付费视频无法离线保存而…...

智能水表、血糖仪、工业HMI:STM32L152ZET6的超低功耗MCU应用版图
STM32L152ZET6:带LCD驱动的超低功耗Cortex-M3旗舰MCU 在电池供电的工业仪表、医疗设备和消费电子产品中,微控制器的功耗与集成度往往是决定产品可行性的关键因素。STM32L152ZET6是意法半导体STM32 L1系列中的高端型号,采用2020mm的LQFP-144封…...
)
别再只用VLC看片了!手把手教你把它变成家庭流媒体服务器(支持UDP/TCP)
解锁VLC的隐藏技能:打造家庭专属流媒体系统的完整指南 你是否曾为在不同设备间切换观看本地视频而烦恼?每次都要用U盘拷贝或者忍受云盘缓慢的上传下载速度?其实,你电脑上那个熟悉的橙色锥形图标——VLC播放器,远比你想…...

2026年小白适用Hermes Agent/OpenClaw Token Plan集成全攻略大全
2026年小白适用Hermes Agent/OpenClaw Token Plan集成全攻略大全。OpenClaw作为阿里云生态下新一代的开源AI自动化代理平台,曾用名Moltbot/Clawdbot,凭借“自然语言交互自动化任务执行大模型智能决策”的核心能力,正在重构个人与企业的工作效…...

归并排序:分治思想的经典应用
归并排序一、核心原理分治思想分:把数组不断从中间拆成左右两半,直到每个子数组只剩 1 个元素(天然有序);治:把两个有序子数组 合并 成一个大的有序数组;递归向上合并,最终整个数组有…...

FanControl深度解析:解锁Windows风扇控制的专业级配置哲学
FanControl深度解析:解锁Windows风扇控制的专业级配置哲学 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trendin…...

CANN/GE动态输入Python构图示例
样例使用指导 【免费下载链接】ge GE(Graph Engine)是面向昇腾的图编译器和执行器,提供了计算图优化、多流并行、内存复用和模型下沉等技术手段,加速模型执行效率,减少模型内存占用。 GE 提供对 PyTorch、TensorFlow 前…...