【线性回归】梯度下降
文章目录
- @[toc]
- 数据
- 数据集
- 实际值
- 估计值
- 梯度下降算法
- 估计误差
- 代价函数
- 学习率
- 参数更新
- `Python`实现
- 导包
- 数据预处理
- 迭代过程
- 结果可视化
- 完整代码
- 结果可视化
- 线性拟合结果
- 代价变化
文章目录
- @[toc]
- 数据
- 数据集
- 实际值
- 估计值
- 梯度下降算法
- 估计误差
- 代价函数
- 学习率
- 参数更新
- `Python`实现
- 导包
- 数据预处理
- 迭代过程
- 结果可视化
- 完整代码
- 结果可视化
- 线性拟合结果
- 代价变化
数据
数据集
( x ( i ) , y ( i ) ) , i = 1 , 2 , ⋯ , m \left(x^{(i)} , y^{(i)}\right) , i = 1 , 2 , \cdots , m (x(i),y(i)),i=1,2,⋯,m
实际值
y ( i ) y^{(i)} y(i)
估计值
h θ ( x ( i ) ) = θ 0 + θ 1 x ( i ) h_{\theta}\left(x^{(i)}\right) = \theta_{0} + \theta_{1} x^{(i)} hθ(x(i))=θ0+θ1x(i)
梯度下降算法
估计误差
h θ ( x ( i ) ) − y ( i ) h_{\theta}\left(x^{(i)}\right) - y^{(i)} hθ(x(i))−y(i)
代价函数
J ( θ ) = J ( θ 0 , θ 1 ) = 1 2 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) 2 = 1 2 m ∑ i = 1 m ( θ 0 + θ 1 x ( i ) − y ( i ) ) 2 J(\theta) = J(\theta_{0} , \theta_{1}) = \cfrac{1}{2m} \displaystyle\sum\limits_{i = 1}^{m}{\left(h_{\theta}\left(x^{(i)}\right) - y^{(i)}\right)^{2}} = \cfrac{1}{2m} \displaystyle\sum\limits_{i = 1}^{m}{\left(\theta_{0} + \theta_{1} x^{(i)} - y^{(i)}\right)^{2}} J(θ)=J(θ0,θ1)=2m1i=1∑m(hθ(x(i))−y(i))2=2m1i=1∑m(θ0+θ1x(i)−y(i))2
学习率
- α \alpha α是学习率,一个大于 0 0 0的很小的经验值,决定代价函数下降的程度
参数更新
Δ θ j = ∂ ∂ θ j J ( θ 0 , θ 1 ) \Delta{\theta_{j}} = \cfrac{\partial}{\partial{\theta_{j}}} J(\theta_{0} , \theta_{1}) Δθj=∂θj∂J(θ0,θ1)
θ j : = θ j − α Δ θ j = θ j − α ∂ ∂ θ j J ( θ 0 , θ 1 ) \theta_{j} := \theta_{j} - \alpha \Delta{\theta_{j}} = \theta_{j} - \alpha \cfrac{\partial}{\partial{\theta_{j}}} J(\theta_{0} , \theta_{1}) θj:=θj−αΔθj=θj−α∂θj∂J(θ0,θ1)
$$
\left[
\begin{matrix}
\theta_{0} \
\theta_{1}
\end{matrix}
\right] :=
\left[
\begin{matrix}
\theta_{0} \
\theta_{1}
\end{matrix}
\right] -
\alpha
\left[
\begin{matrix}
\cfrac{\partial{J(\theta_{0} , \theta_{1})}}{\partial{\theta_{0}}} \
\cfrac{\partial{J(\theta_{0} , \theta_{1})}}{\partial{\theta_{1}}}
\end{matrix}
\right]
$$
[ ∂ J ( θ 0 , θ 1 ) ∂ θ 0 ∂ J ( θ 0 , θ 1 ) ∂ θ 1 ] = [ 1 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) 1 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) x ( i ) ] = [ 1 m ∑ i = 1 m e ( i ) 1 m ∑ i = 1 m e ( i ) x ( i ) ] e ( i ) = h θ ( x ( i ) ) − y ( i ) \left[ \begin{matrix} \cfrac{\partial{J(\theta_{0} , \theta_{1})}}{\partial{\theta_{0}}} \\ \cfrac{\partial{J(\theta_{0} , \theta_{1})}}{\partial{\theta_{1}}} \end{matrix} \right] = \left[ \begin{matrix} \cfrac{1}{m} \displaystyle\sum\limits_{i = 1}^{m}{\left(h_{\theta}\left(x^{(i)}\right) - y^{(i)}\right)} \\ \cfrac{1}{m} \displaystyle\sum\limits_{i = 1}^{m}{\left(h_{\theta}\left(x^{(i)}\right) - y^{(i)}\right) x^{(i)}} \end{matrix} \right] = \left[ \begin{matrix} \cfrac{1}{m} \displaystyle\sum\limits_{i = 1}^{m}{e^{(i)}} \\ \cfrac{1}{m} \displaystyle\sum\limits_{i = 1}^{m}{e^{(i)} x^{(i)}} \end{matrix} \right] \kern{2em} e^{(i)} = h_{\theta}\left(x^{(i)}\right) - y^{(i)} ∂θ0∂J(θ0,θ1)∂θ1∂J(θ0,θ1) = m1i=1∑m(hθ(x(i))−y(i))m1i=1∑m(hθ(x(i))−y(i))x(i) = m1i=1∑me(i)m1i=1∑me(i)x(i) e(i)=hθ(x(i))−y(i)
[ ∂ J ( θ 0 , θ 1 ) ∂ θ 0 ∂ J ( θ 0 , θ 1 ) ∂ θ 1 ] = [ 1 m ∑ i = 1 m e ( i ) 1 m ∑ i = 1 m e ( i ) x ( i ) ] = [ 1 m ( e ( 1 ) + e ( 2 ) + ⋯ + e ( m ) ) 1 m ( e ( 1 ) x ( 1 ) + e ( 2 ) x ( 2 ) + ⋯ + e ( m ) x ( m ) ) ] = 1 m [ 1 1 ⋯ 1 x ( 1 ) x ( 2 ) ⋯ x ( m ) ] [ e ( 1 ) e ( 2 ) ⋮ e ( m ) ] = 1 m X T e = 1 m X T ( X θ − y ) \begin{aligned} \left[ \begin{matrix} \cfrac{\partial{J(\theta_{0} , \theta_{1})}}{\partial{\theta_{0}}} \\ \cfrac{\partial{J(\theta_{0} , \theta_{1})}}{\partial{\theta_{1}}} \end{matrix} \right] &= \left[ \begin{matrix} \cfrac{1}{m} \displaystyle\sum\limits_{i = 1}^{m}{e^{(i)}} \\ \cfrac{1}{m} \displaystyle\sum\limits_{i = 1}^{m}{e^{(i)} x^{(i)}} \end{matrix} \right] = \left[ \begin{matrix} \cfrac{1}{m} \left(e^{(1)} + e^{(2)} + \cdots + e^{(m)}\right) \\ \cfrac{1}{m} \left(e^{(1)} x^{(1)} + e^{(2)} x^{(2)} + \cdots + e^{(m)} x^{(m)}\right) \end{matrix} \right] \\ &= \cfrac{1}{m} \left[ \begin{matrix} 1 & 1 & \cdots & 1 \\ x^{(1)} & x^{(2)} & \cdots & x^{(m)} \end{matrix} \right] \left[ \begin{matrix} e^{(1)} \\ e^{(2)} \\ \vdots \\ e^{(m)} \end{matrix} \right] = \cfrac{1}{m} X^{T} e = \cfrac{1}{m} X^{T} (X \theta - y) \end{aligned} ∂θ0∂J(θ0,θ1)∂θ1∂J(θ0,θ1) = m1i=1∑me(i)m1i=1∑me(i)x(i) = m1(e(1)+e(2)+⋯+e(m))m1(e(1)x(1)+e(2)x(2)+⋯+e(m)x(m)) =m1[1x(1)1x(2)⋯⋯1x(m)] e(1)e(2)⋮e(m) =m1XTe=m1XT(Xθ−y)
- 由上述推导得
Δ θ = 1 m X T e \Delta{\theta} = \cfrac{1}{m} X^{T} e Δθ=m1XTe
θ : = θ − α Δ θ = θ − α 1 m X T e \theta := \theta - \alpha \Delta{\theta} = \theta - \alpha \cfrac{1}{m} X^{T} e θ:=θ−αΔθ=θ−αm1XTe
Python实现
导包
import numpy as np
import matplotlib.pyplot as plt
数据预处理
x = np.array([4, 3, 3, 4, 2, 2, 0, 1, 2, 5, 1, 2, 5, 1, 3])
y = np.array([8, 6, 6, 7, 4, 4, 2, 4, 5, 9, 3, 4, 8, 3, 6])m = len(x)x = np.c_[np.ones((m, 1)), x]
y = y.reshape(m, 1)
迭代过程
alpha = 0.01 # 学习率
iter_cnt = 1000 # 迭代次数
cost = np.zeros(iter_cnt) # 代价数据
theta = np.zeros((2, 1))for i in range(iter_cnt):h = x.dot(theta) # 估计值error = h - y # 误差值cost[i] = 1 / (2 * m) * error.T.dot(error) # 代价值# cost[i] = 1 / (2 * m) * np.sum(np.square(error)) # 代价值# 更新参数delta_theta = 1 / m * x.T.dot(error)theta -= alpha * delta_theta
结果可视化
# 线性拟合结果
plt.scatter(x[:, 1], y, c='blue')
plt.plot(x[:, 1], h, 'r-')
plt.savefig('../pic/fit.png')
plt.show()# 代价结果
plt.plot(cost)
plt.savefig('../pic/cost.png')
plt.show()
完整代码
import numpy as np
import matplotlib.pyplot as pltx = np.array([4, 3, 3, 4, 2, 2, 0, 1, 2, 5, 1, 2, 5, 1, 3])
y = np.array([8, 6, 6, 7, 4, 4, 2, 4, 5, 9, 3, 4, 8, 3, 6])m = len(x)x = np.c_[np.ones((m, 1)), x]
y = y.reshape(m, 1)alpha = 0.01 # 学习率
iter_cnt = 1000 # 迭代次数
cost = np.zeros(iter_cnt) # 代价数据
theta = np.zeros((2, 1))for i in range(iter_cnt):h = x.dot(theta) # 估计值error = h - y # 误差值cost[i] = 1 / (2 * m) * error.T.dot(error) # 代价值# cost[i] = 1 / (2 * m) * np.sum(np.square(error)) # 代价值# 更新参数delta_theta = 1 / m * x.T.dot(error)theta -= alpha * delta_theta# 线性拟合结果
plt.scatter(x[:, 1], y, c='blue')
plt.plot(x[:, 1], h, 'r-')
plt.savefig('../pic/fit.png')
plt.show()# 代价结果
plt.plot(cost)
plt.savefig('../pic/cost.png')
plt.show()
结果可视化
线性拟合结果

代价变化

相关文章:
【线性回归】梯度下降
文章目录 [toc]数据数据集实际值估计值 梯度下降算法估计误差代价函数学习率参数更新 Python实现导包数据预处理迭代过程结果可视化完整代码 结果可视化线性拟合结果代价变化 数据 数据集 ( x ( i ) , y ( i ) ) , i 1 , 2 , ⋯ , m \left(x^{(i)} , y^{(i)}\right) , i 1 ,…...

GMSL图像采集卡,适用于无人车、自动驾驶、自主机器、数据采集等场景,支持定制
基于各种 系列二代 G MS L 图像采集卡(以下简称 二代图像采集卡)是一款自主研发的一款基于 F P G A 的高速图像产品,二代图像采集卡相比一代卡,由于采用PCIe G en 3 技术,速度和带宽都相应的有了成 倍的提高。该图像…...

docker不删除容器更改其挂载目录
场景:docker搭建的jenkins通常需要配置很多开发环境,当要更换挂载目录,每次都需要删除容器重新运行,不在挂载目录的环境通常不会保留。 先给一个参考博客docker不删除容器,修改容器挂载或其他_jenkins 修改容器挂载do…...
K8s Service 背后是怎么工作的?
kube-proxy 是 Kubernetes 集群中负责服务发现和负载均衡的组件之一。它是一个网络代理,运行在每个节点上, 用于 service 资源的负载均衡。它有两种模式:iptables 和 ipvs。 iptables iptables 是 Linux 系统中的一个用户空间实用程序,用于…...
ClickHouse配置与使用
静态IP配置 # 修改网卡配置文件 vim /etc/sysconfig/network-scripts/ifcfg-ens33# 修改文件内容 TYPEEthernet PROXY_METHODnone BROWSER_ONLYno BOOTPROTOstatic IPADDR192.168.18.128 NETMASK255.255.255.0 GATEWAY192.168.18.2 DEFROUTEyes IPV4_FAILURE_FATALno IPV6INIT…...
将某一个 DIV 块全屏展示
文章目录 需求分析 需求 上节我们研究了如何将页面中的指定 div 下载为图片:跳转查看 本节演技一下如何将 DIV 全屏展示 全屏展示某一个 DIV 分析 其实就是模拟键盘动作 F11 var element document.getElementById(pic) var requestMethod element.requestFullS…...

K8S集群再搭建
前述:总体是非常简单的,就是过程繁琐,不过都是些重复的操作 master成员: [controller-manager, scheduler, api-server, etcd, proxy,kubelet] node成员: [kubelet, proxy] master要修改的配置文件有 1. vi /etc/etcd/etcd.conf # 数…...

工具-博客搭建
以下相关讲解均基于hexo github pages方案,请注意!!!博客搭建方案选择 参考文章1 搭建教程 参考文章1 hexo github pages搭建过程中遇到的问题 删除categories、tags 1、删除含有需要删除categories、tags的文章 2、hexo …...

贪心算法:合并区间
参考资料:代码随想录 题目链接:. - 力扣(LeetCode) 做过用最少数量的箭引爆气球和无重叠区间这两道题目后,题意和题解都不难理解。唯一的一点儿难点是对于api的运用。 class Solution {public int[][] merge(int[][…...

DFA 算法
为什么要学习这个算法 前一段时间遇到了瓶颈,因为词库太多了导致会有一些速度过慢,而且一个正则表达式已经放不下了,需要进行拆分正则才可以。 正好我以前看过有关 dfa 的介绍,但是并没有深入的进行研究,所以就趁着周…...
Web(数字媒体)期末作业
一.前言 1.本资源为类似于打飞机的网页游戏 2.链接如下:【免费】前端web或者数字媒体的期末作业(类似于打飞机的2D网页小游戏)资源-CSDN文库 二.介绍文档...

展现金融科技前沿力量,ATFX于哥伦比亚金融博览会绽放光彩
不到半个月的时间里,高光时刻再度降临ATFX。而这一次,是ATFX不曾拥有的桂冠—“全球最佳在线经纪商”(Best Global Online Broker)。2024年5月15日至16日,拉丁美洲首屈一指的金融盛会—2024年哥伦比亚金融博览会(Money Expo Colombia 2024) 于…...
、元素rem实现自适应)
html 根字号 以及 设置根元素font-size:calc(100vw/18.75)、元素rem实现自适应
rem 单位介绍:rem 是相对文档根元素(html)字体大小的尺寸单位,当元素的尺寸或文字字号等使用 rem 单位时,会随着根元素的 font-size变化而变化。 得出结论:在不同分辨率的设备下动态设置根元素的字体大小就可以实现页面自适应。 …...

size_t无符号数相关知识点
size_t无符号数相关知识点 在代码编译的时候,报错一个warning: comparison between signed and unsigned interger expression [-wsign-compare] 找到代码,告警这一段代码 size_t count timeProtocol.m_intersectionArray.size(); for (u…...
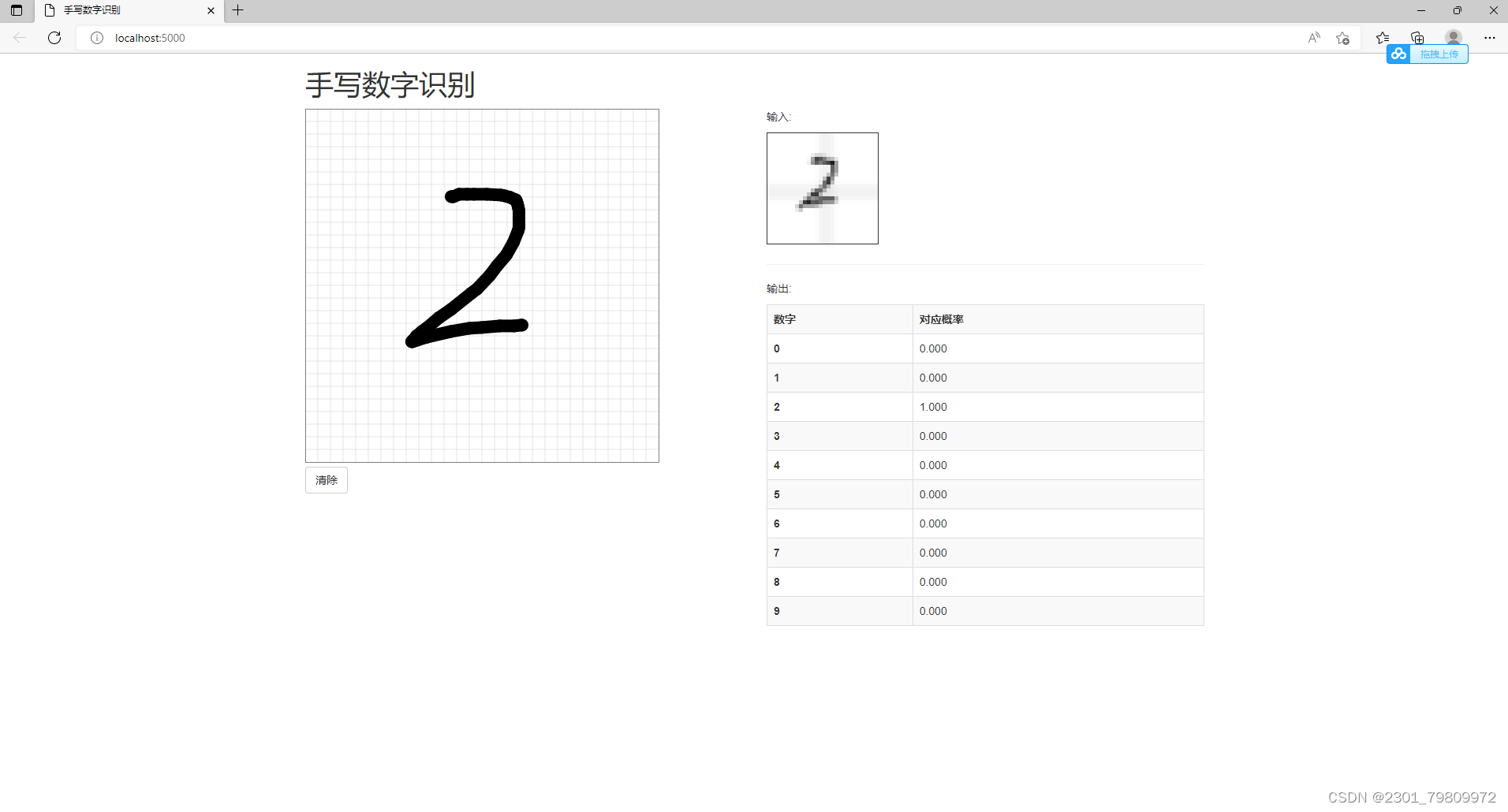
深度学习之基于Tensorflow+Flask框架Web手写数字识别
欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。 文章目录 一项目简介 二、功能三、系统四. 总结 一项目简介 一、项目背景与意义 手写数字识别是深度学习领域中的一个经典问题,也是计算机视觉领域的重要应用之一。…...
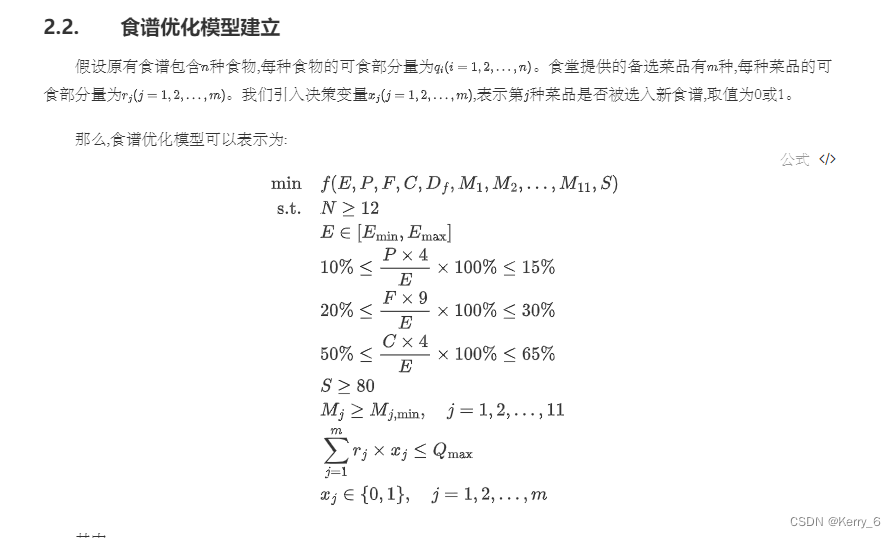
2024电工杯B题食谱评价与优化模型思路代码论文分析
2024年电工杯数学建模竞赛B题论文和代码已完成,代码为B题全部问题的代码,论文包括摘要、问题重述、问题分析、模型假设、符号说明、模型的建立和求解(问题1模型的建立和求解、问题2模型的建立和求解、问题3模型的建立和求解)、模型…...
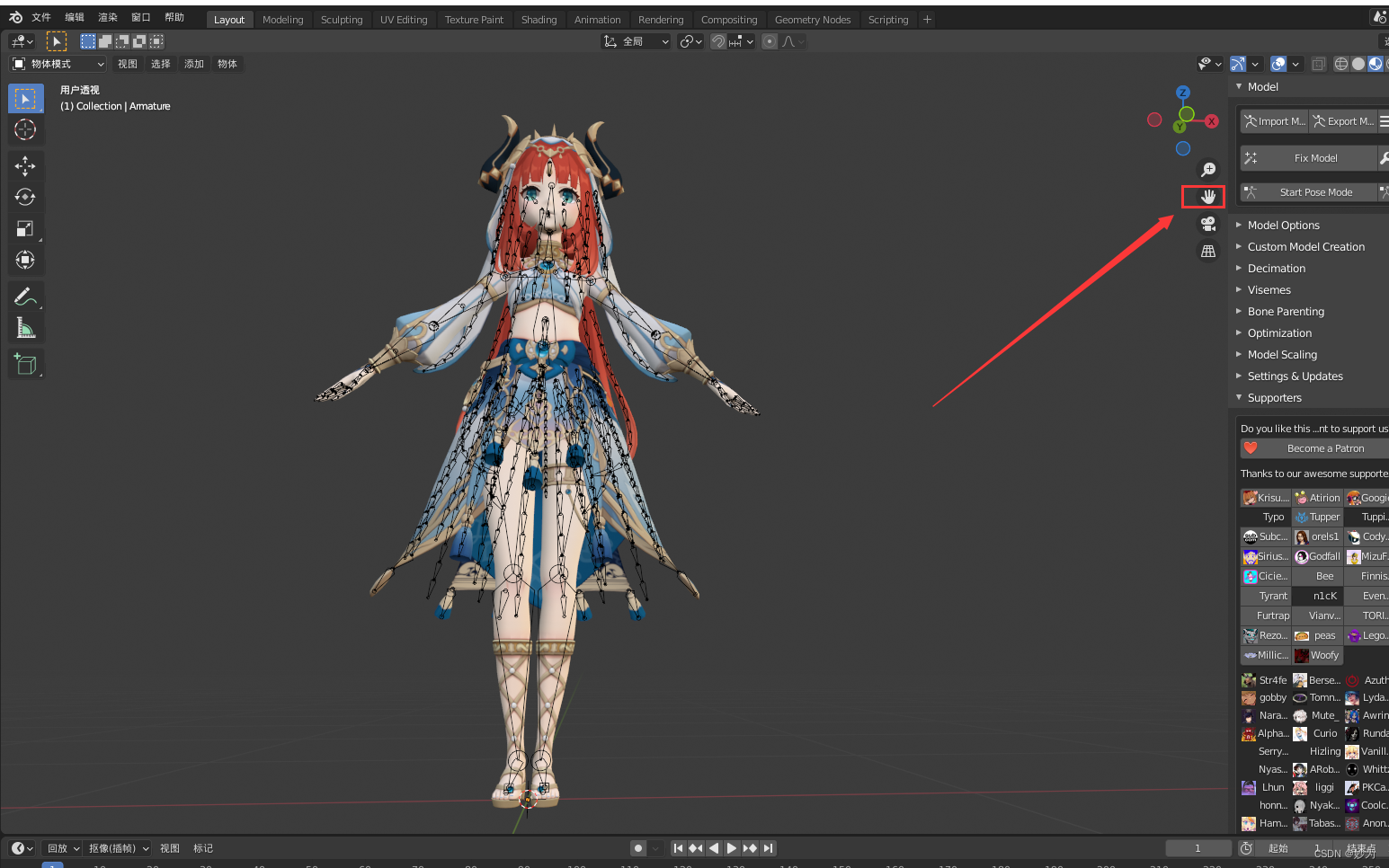
blender安装cats-blender-plugin-0-19-0插件,导入pmx三维模型
UE5系列文章目录 文章目录 UE5系列文章目录前言一、Blender安装二、cats-blender-plugin-0-19-0插件下载三、下载bmp文件四、在blender2.93中安装cats-blender-plugin-0-19-0插件 前言 blender本身不支持pmx三维模型,需要用到cats-blender-plugin-0-19-0插件。 一…...

[源码+搭建教程]西游伏妖篇手游_GM_单机+和朋友玩
为了学习和研究软件内含的设计思想和原理,本人花心血和汗水带来了搭建教程!!! 教程不适于服架设,严禁服架设!!!请牢记!!! 教程仅限学习使用&…...
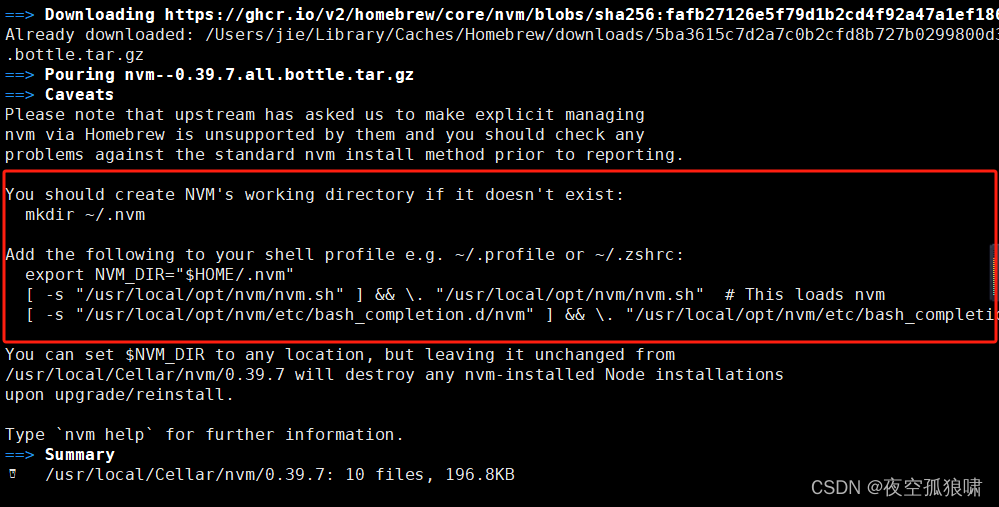
windows、mac、linux中node版本的切换(nvm管理工具),解决项目兼容问题 node版本管理、国内npm源镜像切换
文章目录 在工作中,我们可能同时在进行2个或者多个不同的项目开发,每个项目的需求不同,进而不同项目必须依赖不同版本的NodeJS运行环境,这种情况下,对于维护多个版本的node将会是一件非常麻烦的事情,nvm就是…...

【MySQL精通之路】全文搜索-布尔型全文搜索
1.使用方法 MySQL可以使用IN BOOLEAN MODE修饰符执行布尔全文搜索。 使用此修饰符,某些字符在搜索字符串中单词的开头或结尾具有特殊含义。 在下面的查询中,和-运算符分别表示单词必须存在或不存在,才能进行匹配。 因此,查询检…...

从官方例程到实际项目:AXI Timer v2.0在Zynq平台上的避坑指南与调试实录
从官方例程到实际项目:AXI Timer v2.0在Zynq平台上的避坑指南与调试实录 在嵌入式系统开发中,定时器是最基础也最关键的硬件外设之一。Xilinx提供的AXI Timer v2.0 IP核因其灵活的配置选项和丰富的功能特性,成为Zynq平台上实现精确时间控制的…...

从XML-RPC到gRPC:一个老派RPC协议如何影响了今天的微服务通信设计
从XML-RPC到gRPC:技术演进中的通信范式变迁 二十年前,当Dave Winer和Microsoft首次提出XML-RPC协议时,他们可能不会想到这个简单的远程调用机制会成为现代微服务架构的启蒙。在1998年的技术背景下,XML-RPC以其基于HTTP和XML的简洁…...

在Taotoken模型广场中根据任务与预算选择合适的AI模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Taotoken模型广场中根据任务与预算选择合适的AI模型 当你准备将大模型能力集成到自己的应用或工作流中时,面对市场上…...

Super IO:Blender剪贴板导入导出神器,让3D工作流效率翻倍
Super IO:Blender剪贴板导入导出神器,让3D工作流效率翻倍 【免费下载链接】super_io blender addon for copy paste import / export 项目地址: https://gitcode.com/gh_mirrors/su/super_io 你是否厌倦了在Blender中反复点击文件菜单、浏览文件夹…...

ComfyUI-Impact-Pack V8完整实战指南:解锁AI图像增强的5大核心功能
ComfyUI-Impact-Pack V8完整实战指南:解锁AI图像增强的5大核心功能 【免费下载链接】ComfyUI-Impact-Pack Custom nodes pack for ComfyUI This custom node helps to conveniently enhance images through Detector, Detailer, Upscaler, Pipe, and more. 项目地…...

零基础转行工业AI视觉全攻略|从入门学习、项目积累、求职就业到副业接单完整路径
摘要:当下传统自动化、机械、普通编程岗位普遍存在内卷严重、薪资天花板低、成长空间有限等问题。而工业AI视觉作为智能制造核心刚需赛道,具备岗位缺口大、薪资溢价高、技术生命周期长、可主业就业副业接单的核心优势,成为应届生、职场转行、…...

Gemini 1.5、Sora与V-JEPA:AI工程水位线的三大坐标轴
1. 这份AI Newsletter到底在讲什么?为什么它值得你花5分钟读完“Towards AI”这个名称,对很多刚接触AI内容生态的朋友来说可能有点陌生——它不是某个大厂的官方号,也不是某位顶流KOL的个人频道,而是一个由一线工程师、研究员和产…...

Skelerealms:Godot开放世界的数据驱动架构解析
1. 这不是又一个“Godot RPG模板”,而是一套为开放世界量身定制的底层骨架我第一次在GitHub上看到Skelerealms这个仓库时,没点开README就直接关掉了——标题里带“RPG框架”“Godot”“开放世界”的项目,过去三年我至少扫过四十七个ÿ…...
:当epoll遇见MQTT)
物联网接入层技术剖析(四):当epoll遇见MQTT
Netty与高性能网络服务、Linux高并发网络编程实战、从epoll到Netty:物联网接入层技术剖析、深入理解I/O多路复用、服务端网络编程进阶指南 Netty与物联网:当epoll遇见MQTT 0 写在前面 这个系列写了三篇,从 select 到 epoll,从内…...

UVa 273 Jack Straws
题目分析 本题的题目背景源自一种名为 “Jack Straws\texttt{Jack Straws}Jack Straws” 的游戏,玩家需要从桌上一堆杂乱摆放的塑料或木质 “稻草” 中逐根取出,而不扰动其他稻草。本题不关心游戏过程,只关心一个问题:给定若干根稻…...