西门子CPU与汇川伺服通信与控制
西门子CPU与汇川620F伺服通信与控制
- 一、西门子CPU与汇川620F伺服通信与控制
- 1、器件准备
- 2、==伺服软件设置==
- 3、==PLC添加汇川伺服描述文件==
- 4、PLC编程调试
- 5、总结
- 二、西门子s7-1500限位信号接到伺服的方法
- 1、==通过默认报文获取限位信号==
- 2、==添加自定义报文获取限位信号==
- 3、总结
- 三、西门子S7-1500自带模拟量控制伺服转速
一、西门子CPU与汇川620F伺服通信与控制
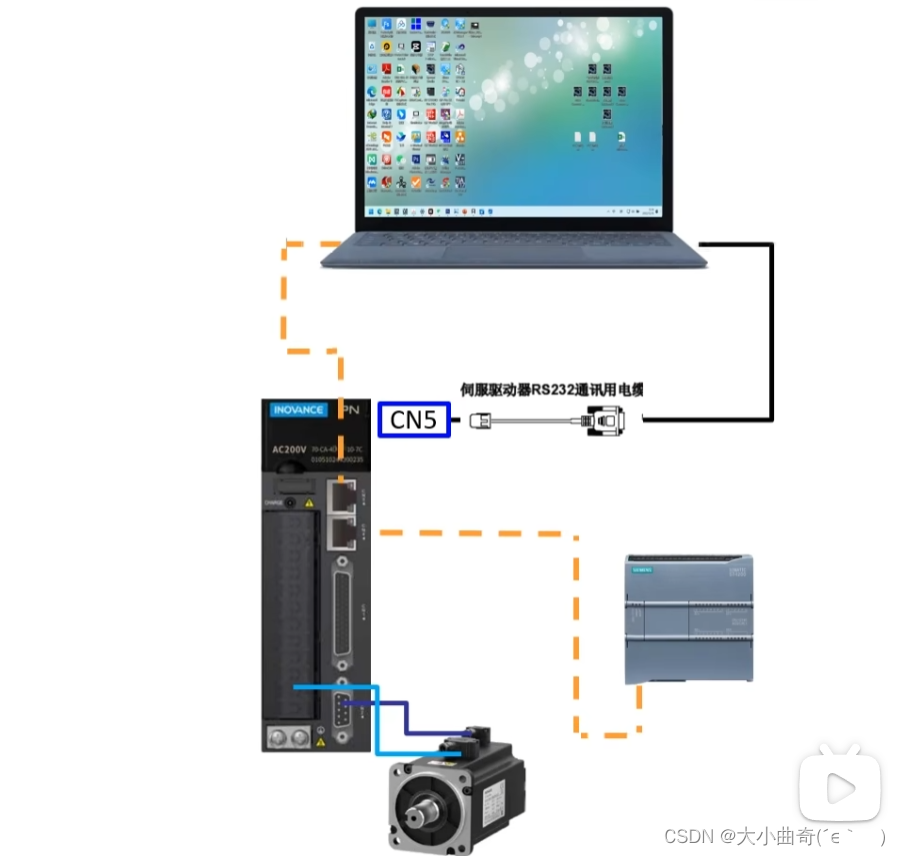
1、器件准备
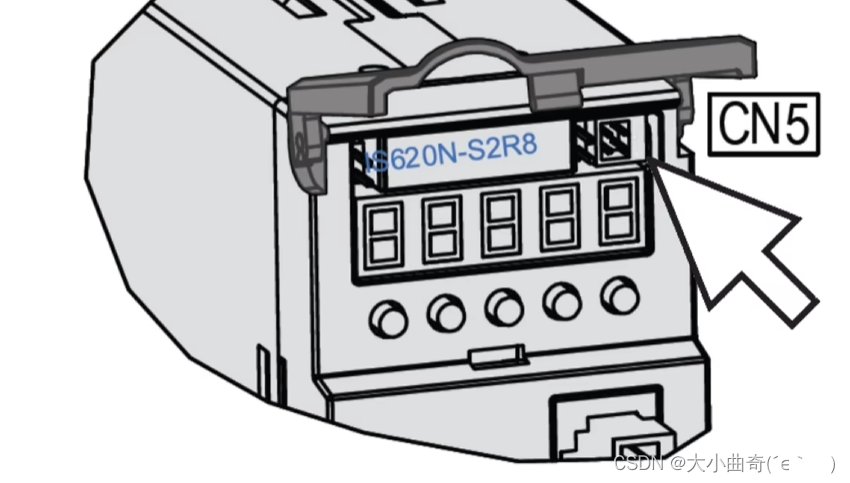
西门子PLC、汇川伺服驱+动器、一根汇川伺服驱动器232通信线、一个USB转232通讯线(设置汇川伺服只能用串口通信,且通信线插到伺服CN5口);

2、伺服软件设置
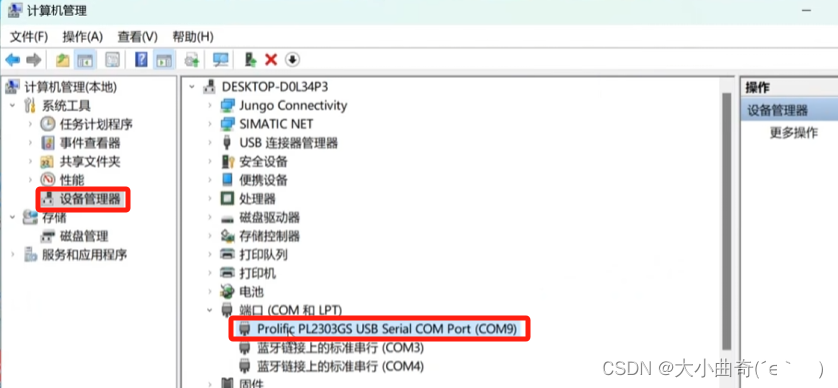
步骤1,电脑插好USB转232并连接到伺服后,打开设备管理查看串口的端口号
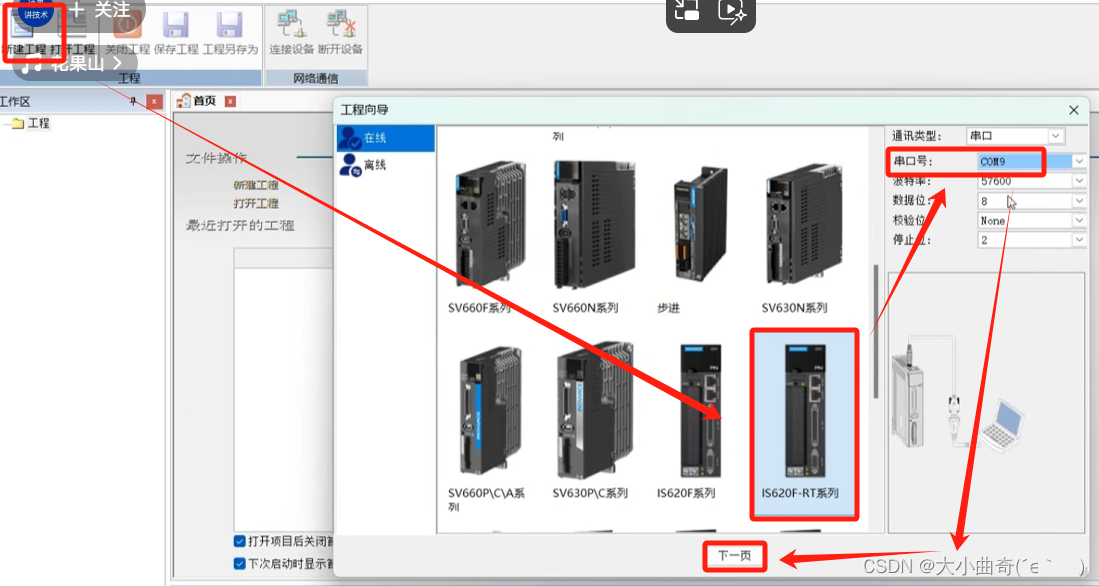
步骤2,打开汇川伺服调试软件

新建工程——选择伺服驱动器型号为IS620F-RT系列,端口号选择与步骤一一样的端口号(如COM9)
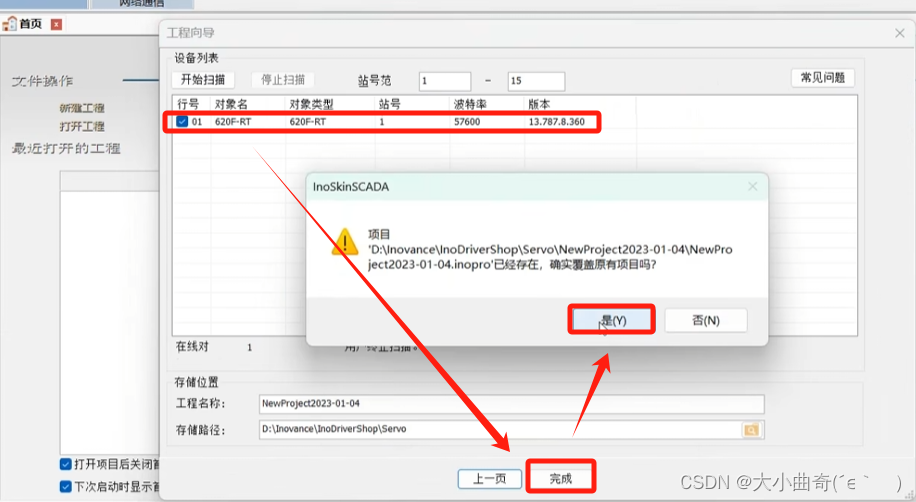
步骤3,等待自动扫描出来,点击完成;
步骤4,设置伺服参数
-
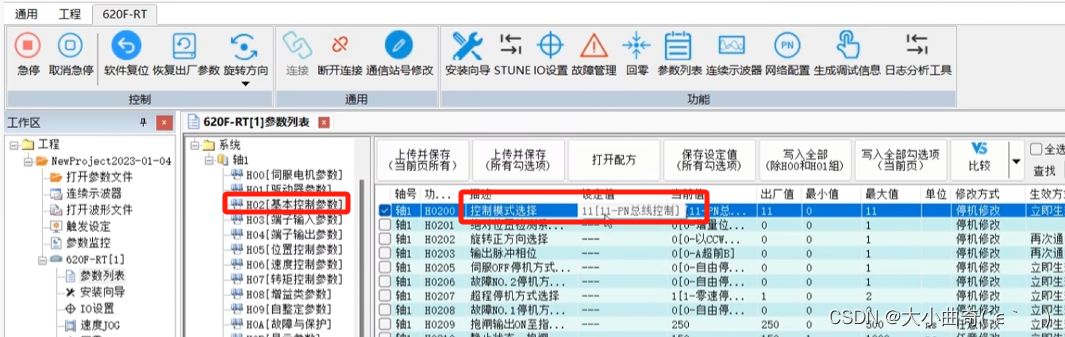
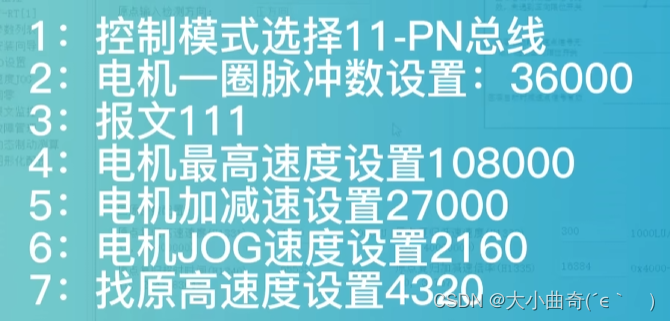
参数1:设置驱动器控制模式为
11[11-PN总线控制](模式不对则PLC与驱动器将无法通信) -
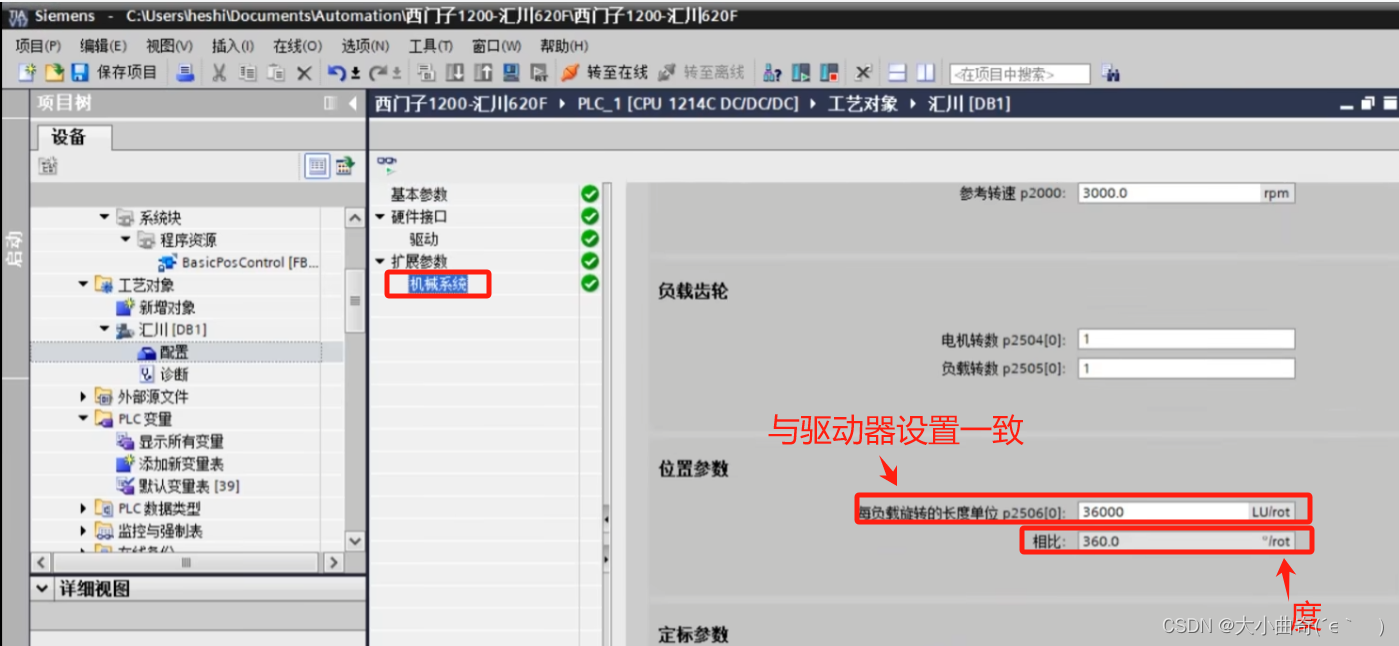
参数2:设置点击旋转一圈需要的脉冲数(可以设置
H502但是需要断电重启,也可以设置H509)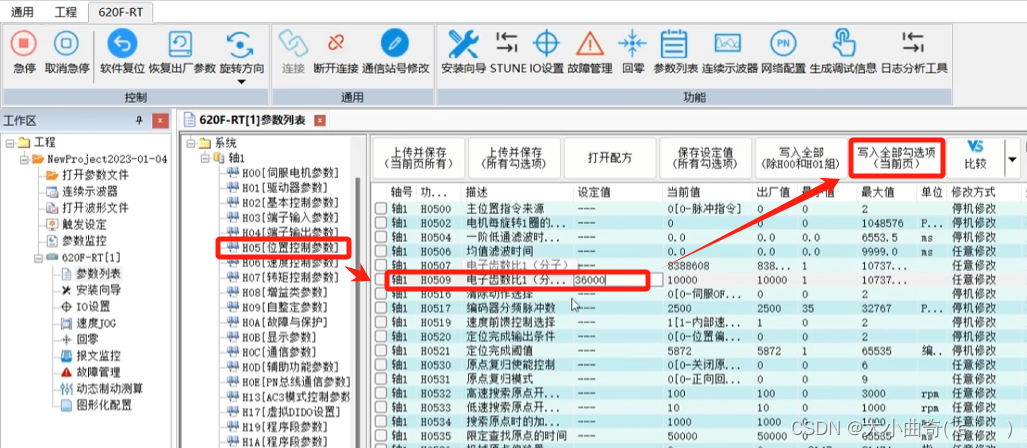
36000脉冲丝杆转一圈;
我们设置H509分母为36000,360度,精度小数点后两位,设置完毕点击写入全部勾选项
驱动器编码器是23位,即转一圈编码器反馈的数量是8388608,这个分子H507就是默认的8388608
-
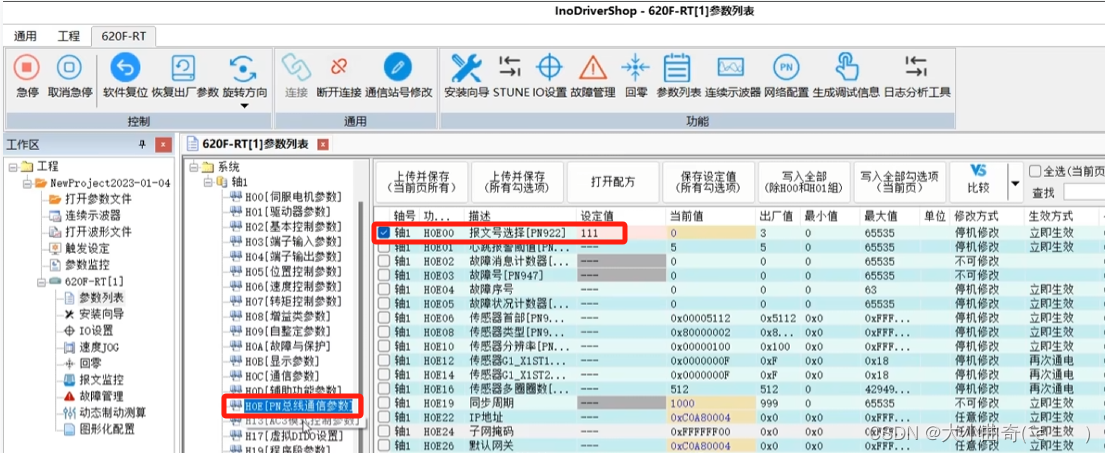
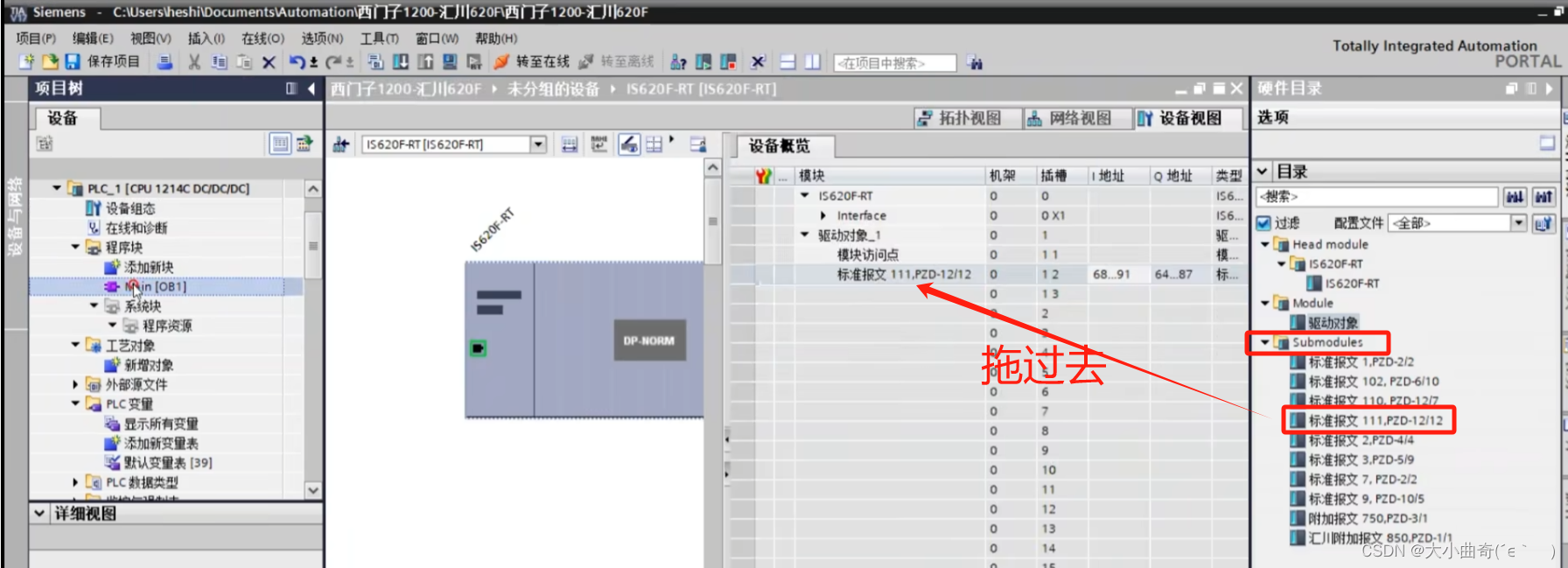
参数3:确认报文是否是
111,PLC用EPOS模式;
这个参数可以不用设置,PLC端设置好后会自动更新;
-
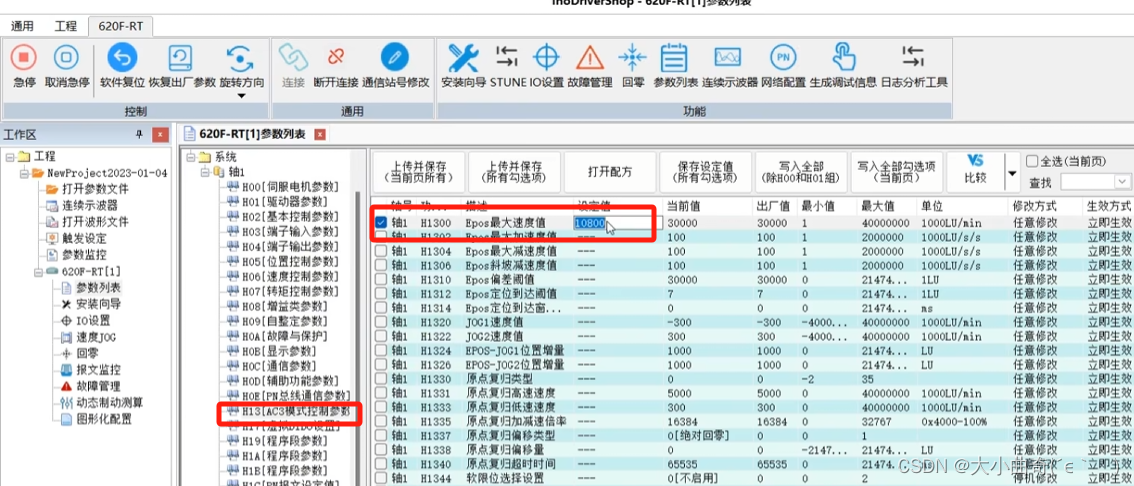
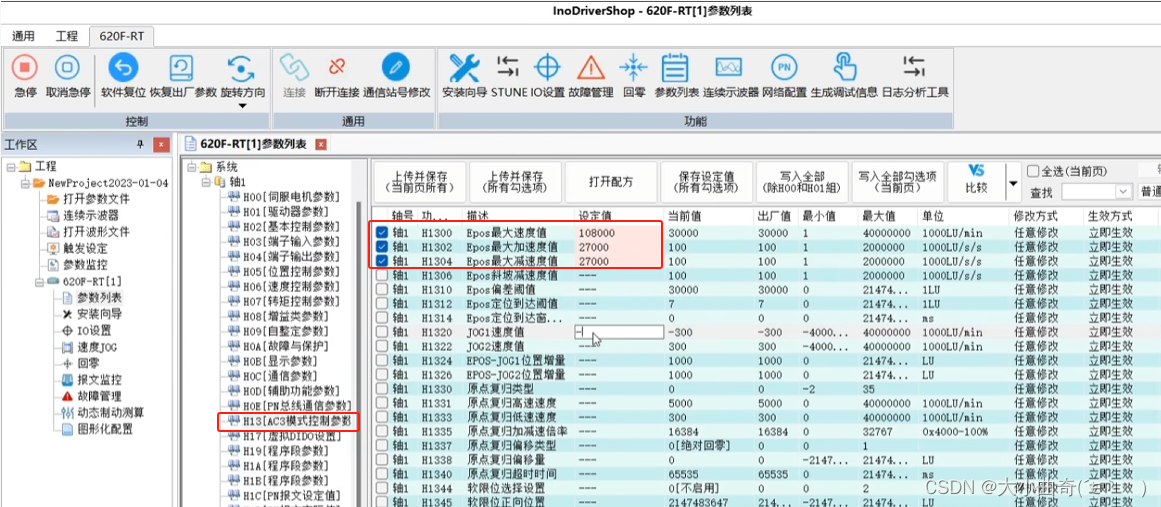
参数4:设置伺服控制限制PLC输出最大电机速度
注意单位是1000LU/分钟;
LU是西门子定义的一个单位,可以理解为细分;
比如说限制最大转速是3000转每分钟,转一圈的脉冲数36000,应该乘以60;
最大转速是3000每分钟,则1秒最快是50转,所以还要乘以50,单位是1000LU1分钟,则应该写108000;
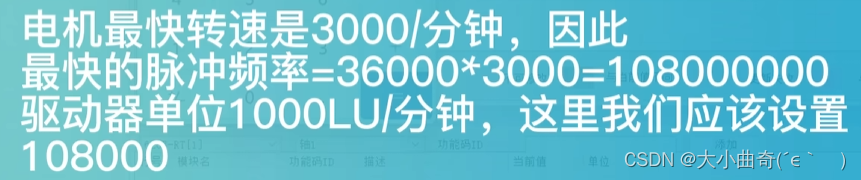
计算公式:1圈36000脉冲*60秒*最大转速50转/s)1分钟最大脉冲频率108000000,除以1000LU/分钟;
-
参数5:设置加减速度(速度的计算可以查看手册)
-
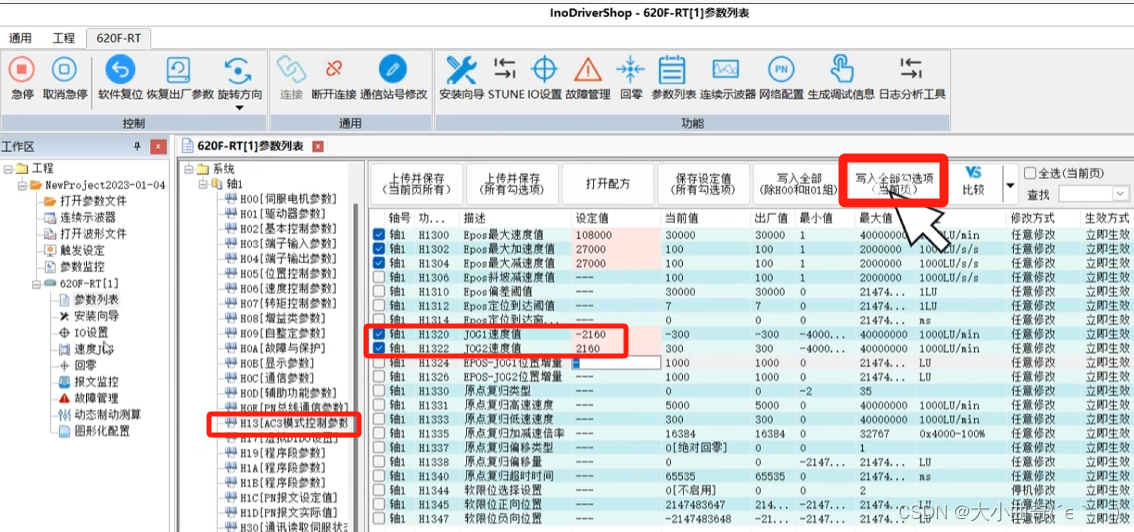
参数6:设置JOG速度,我这边验证用的,JOG速度设置1秒转一圈
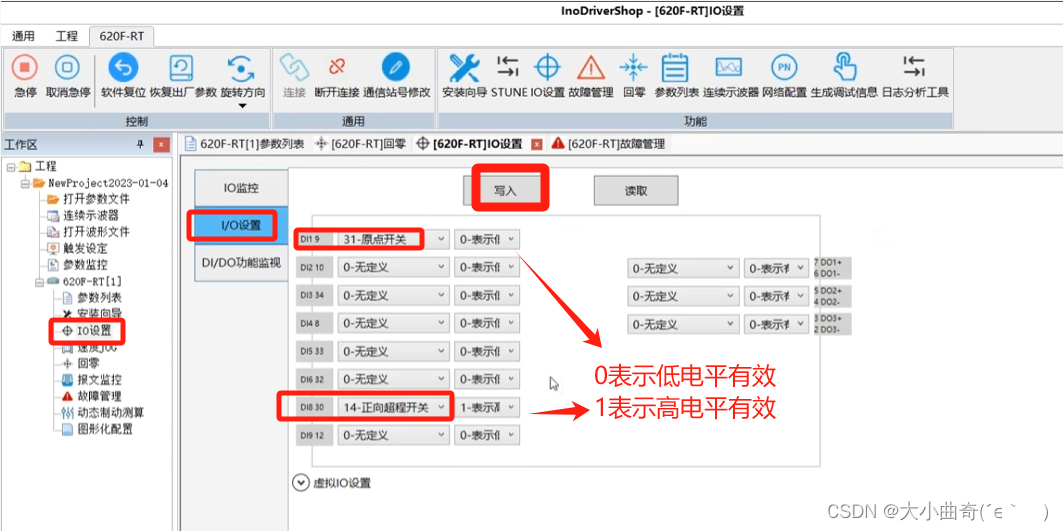
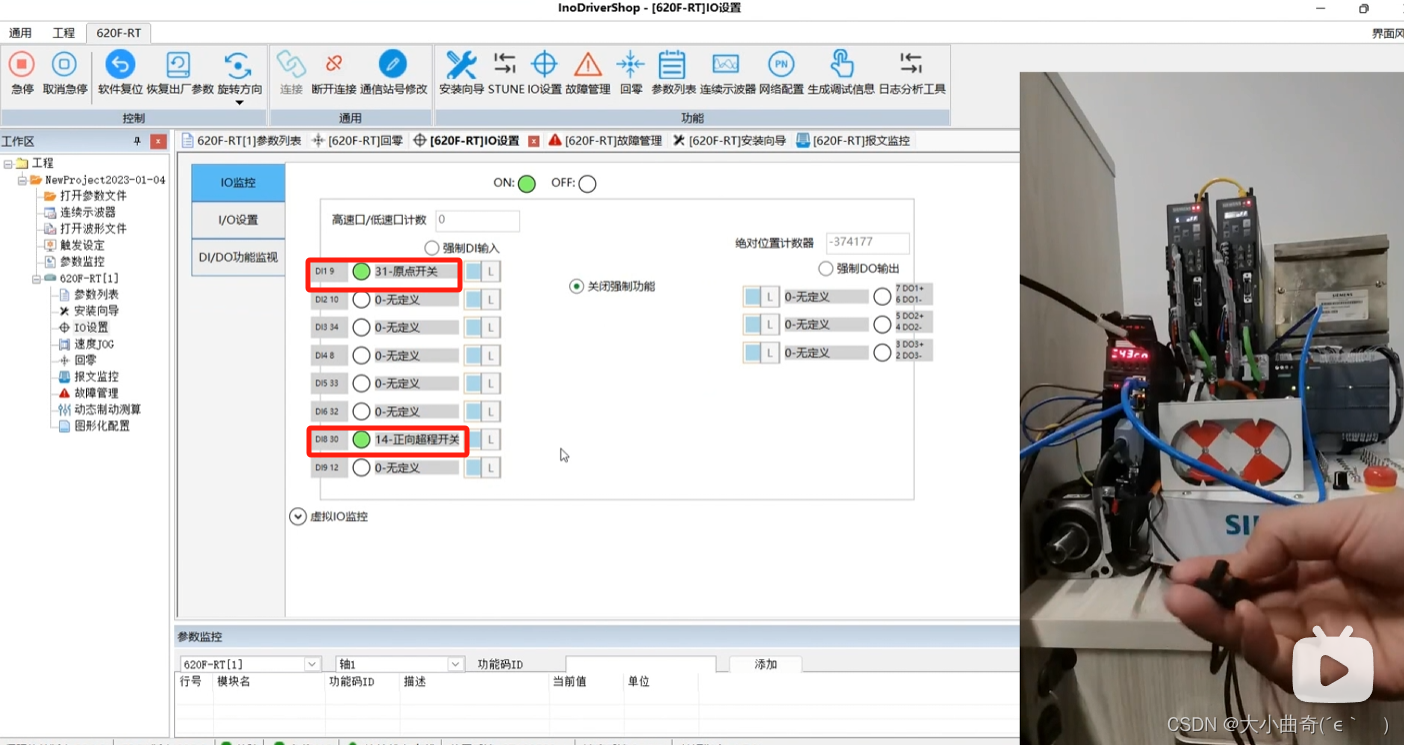
步骤7:设置限位和原点设置
若只接了原点常开和正限位常闭,所以我就设置两个
注意要根据自己实际接线的DI引脚选择,否则驱动器的信号将收不到;
设置完成点击 写入;
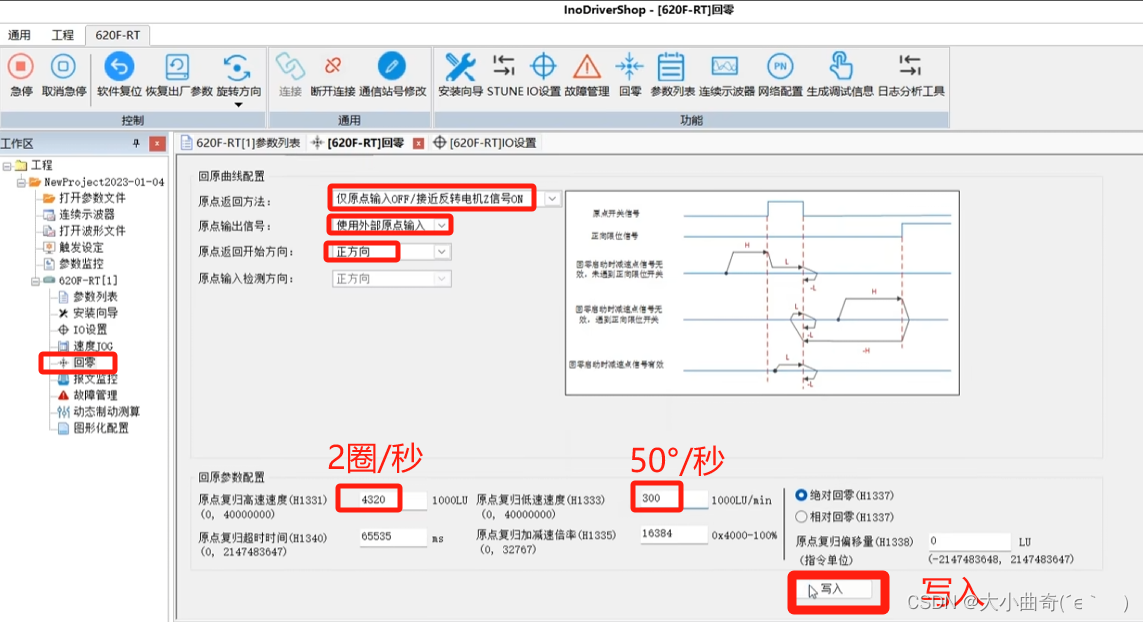
- 步骤8:设置找原(找零)
原点复归低速度默认300,3001000/60,低速度是1秒50度
【3001000=300000脉冲/分钟;每秒5000个脉冲,转一圈360度需要36000个脉冲,故5000÷36000*360°=50°/s】
总结:伺服电机的参数大致设置这么多,其他需要可查看手册调整;
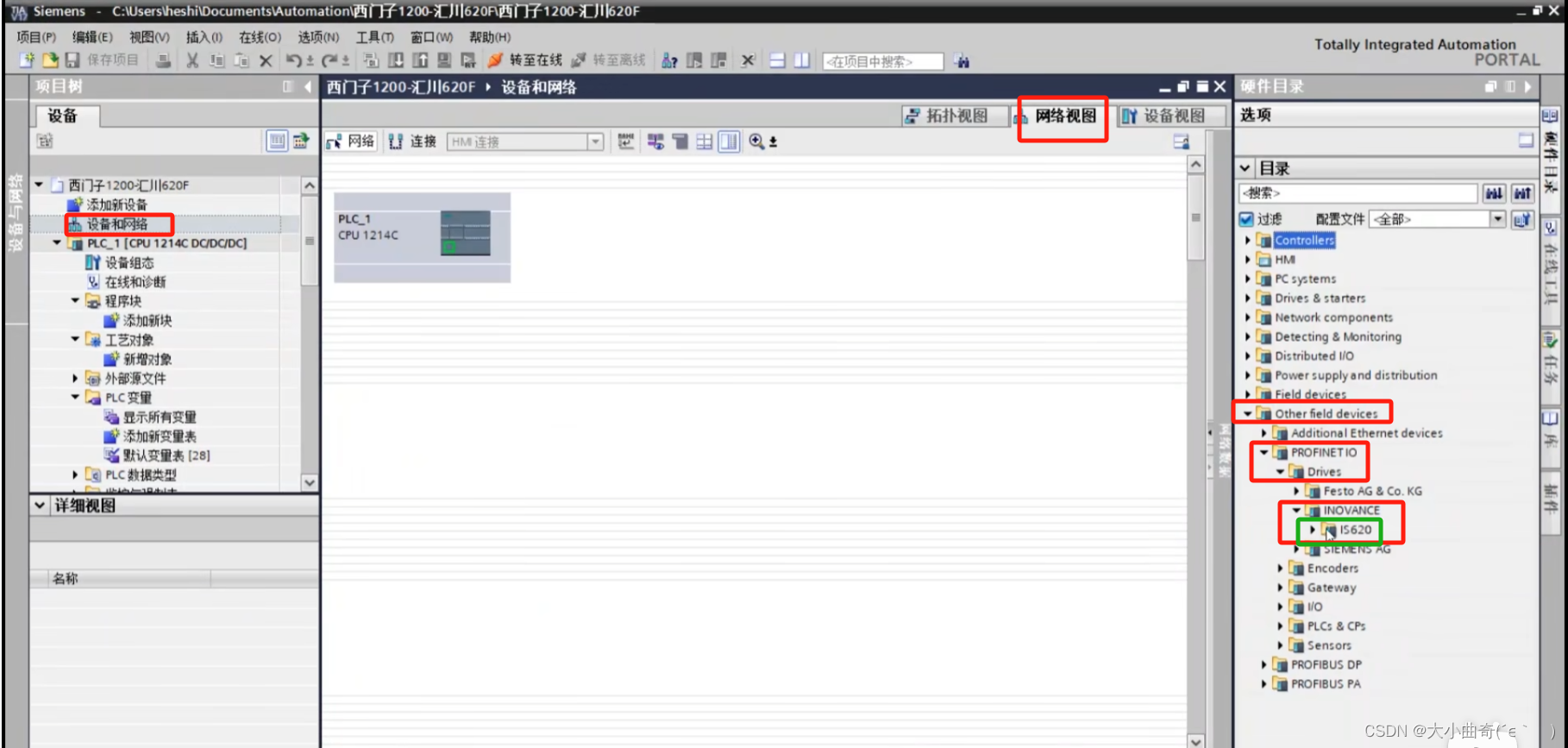
3、PLC添加汇川伺服描述文件
-
步骤1.从汇川官方网站下载
IS620F-RT伺服的XML文件 -
步骤2:博途软件添加汇川伺服描述文件
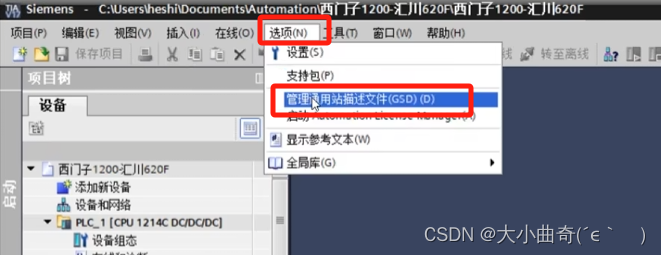

勾选需要添加的汇川伺服文件,点击安装即可【必须安装,不然没办法添加驱动器】
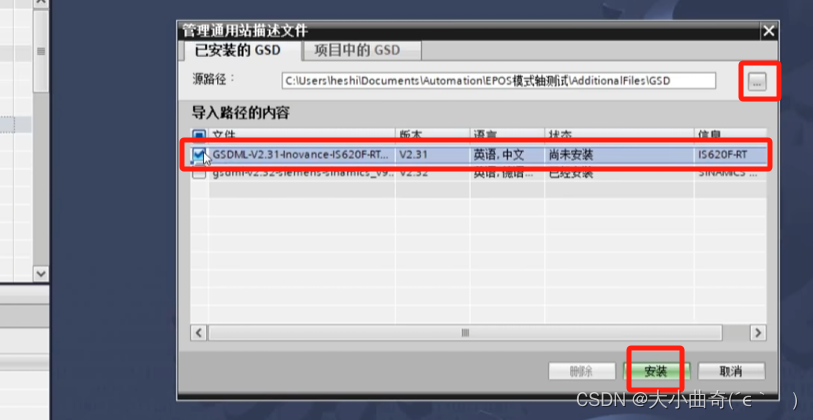
添加完成后,打开硬件目录查看汇川伺服是否添加成功
4、PLC编程调试
按照图示把网络连接好,上电;
-
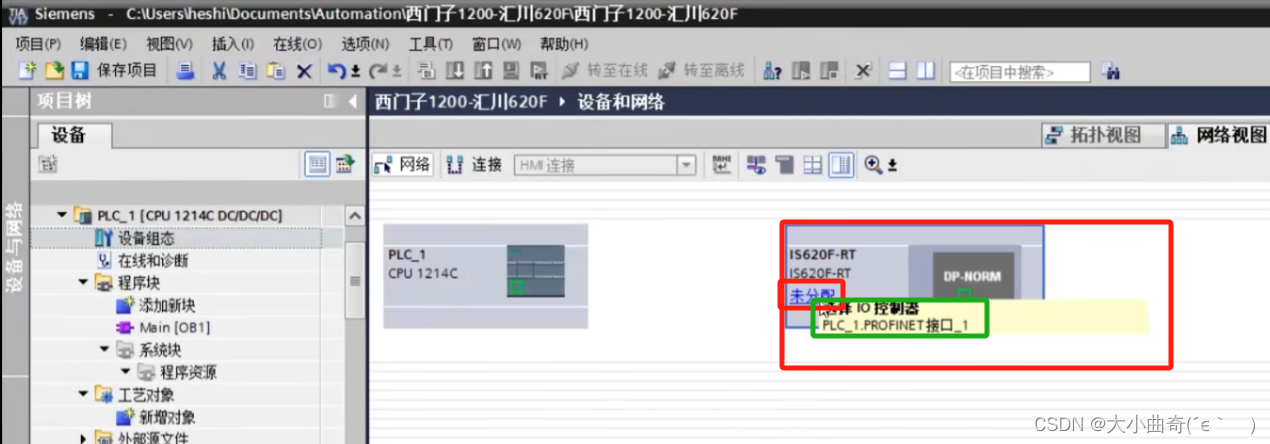
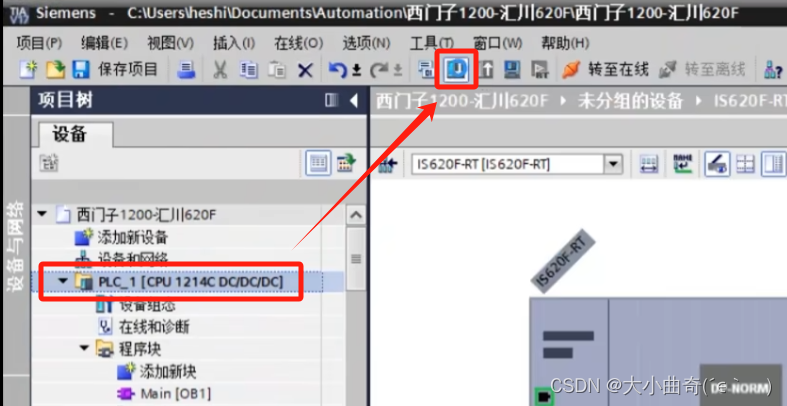
步骤1:添加驱动器到网络示图
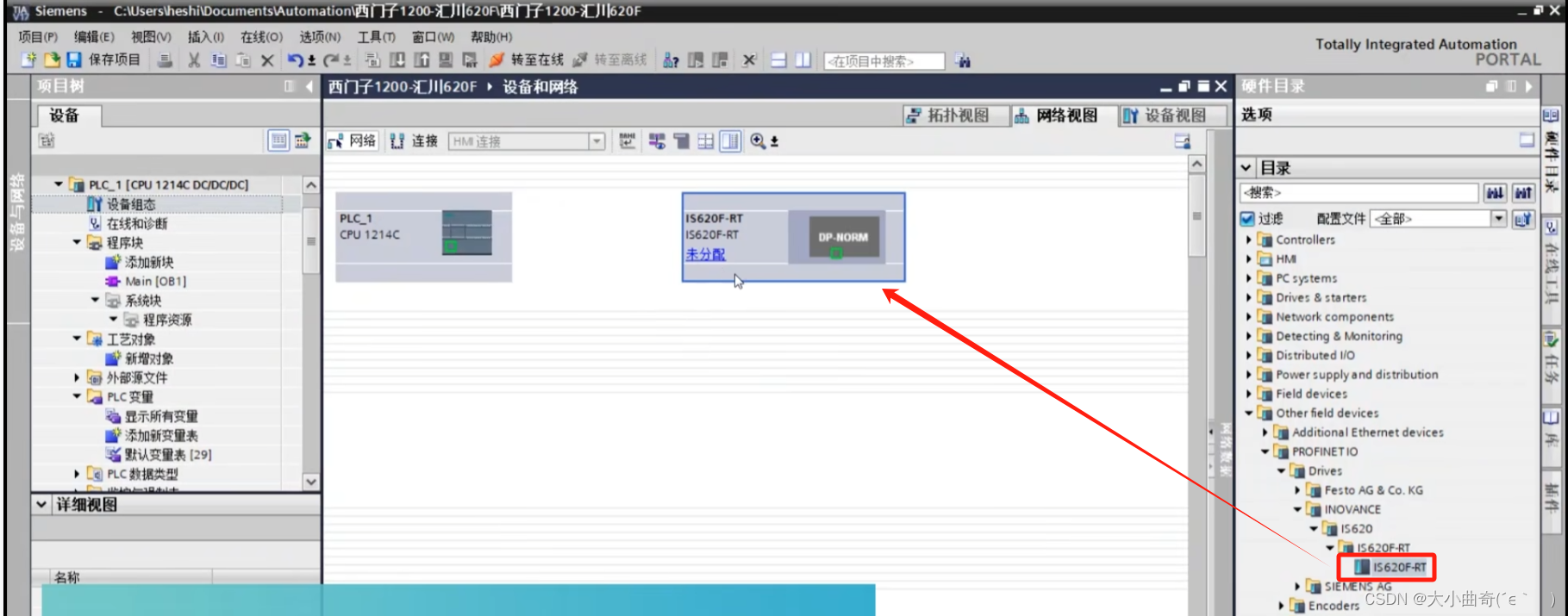
点击未分组,添加网络
-
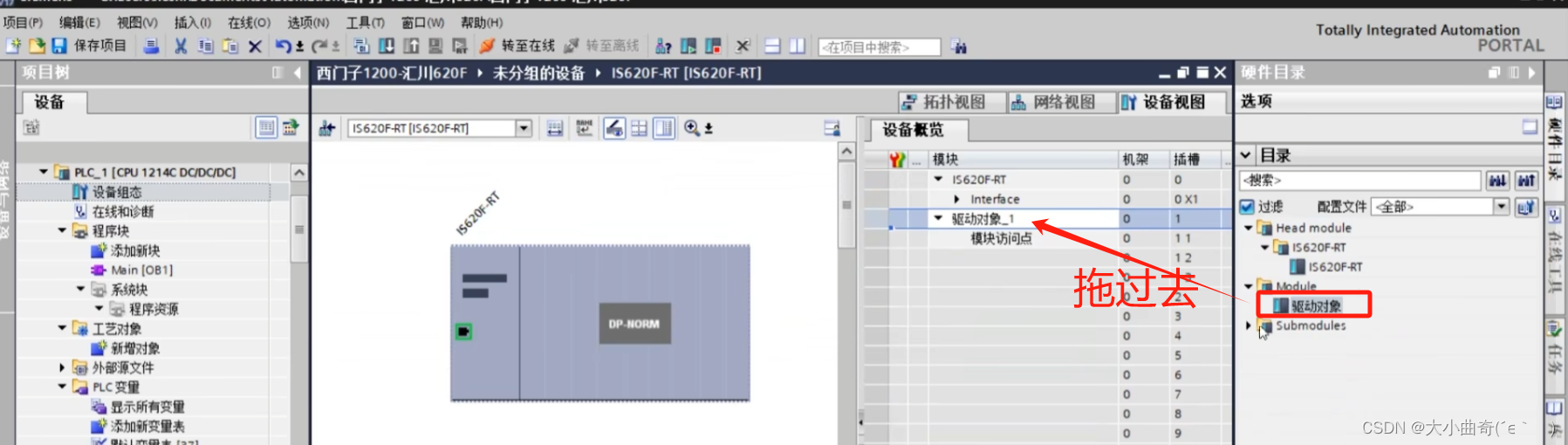
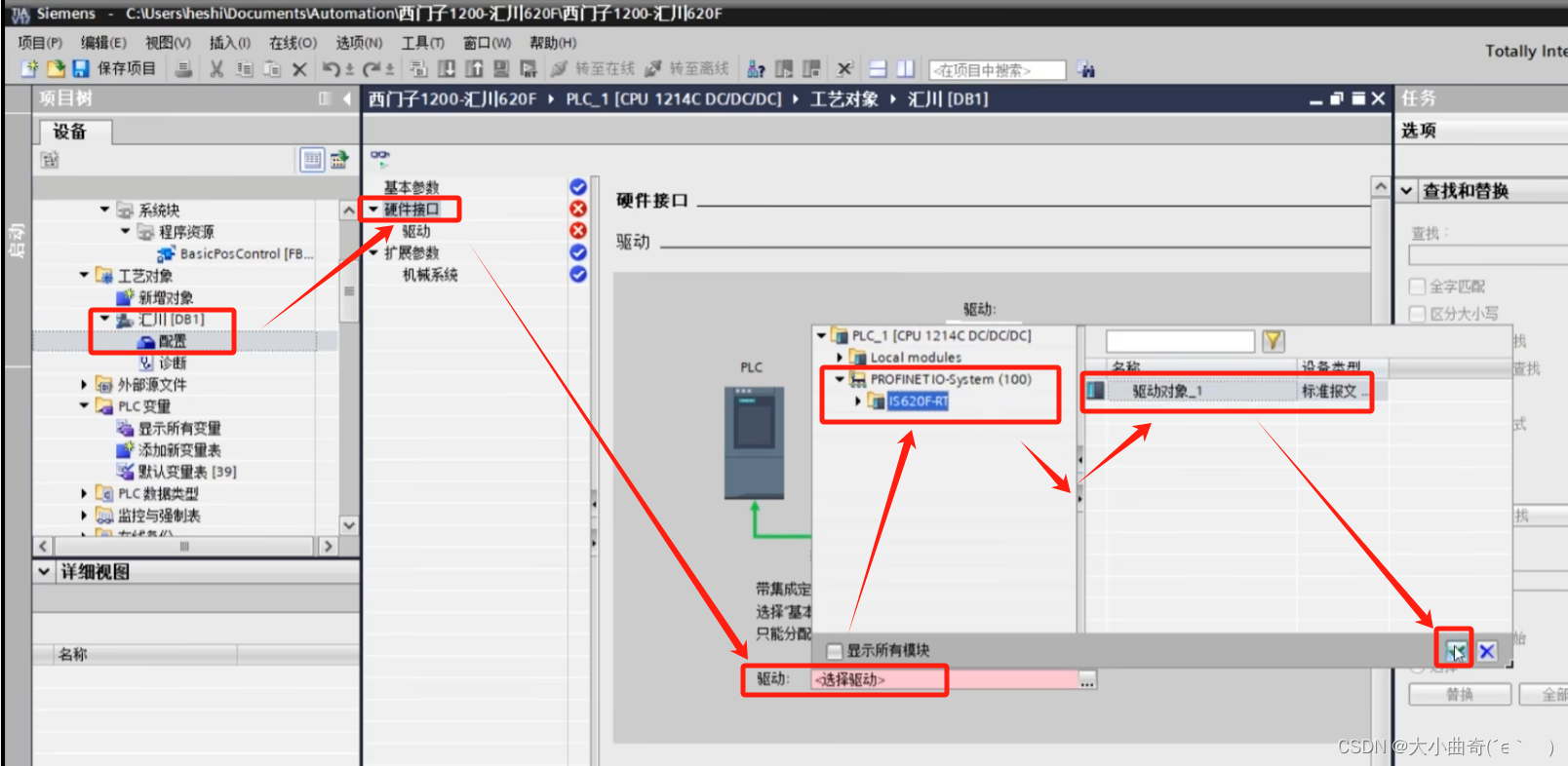
步骤2:配置驱动器
将汇川伺服驱动器与西门子PLC在网络试图中相连接;
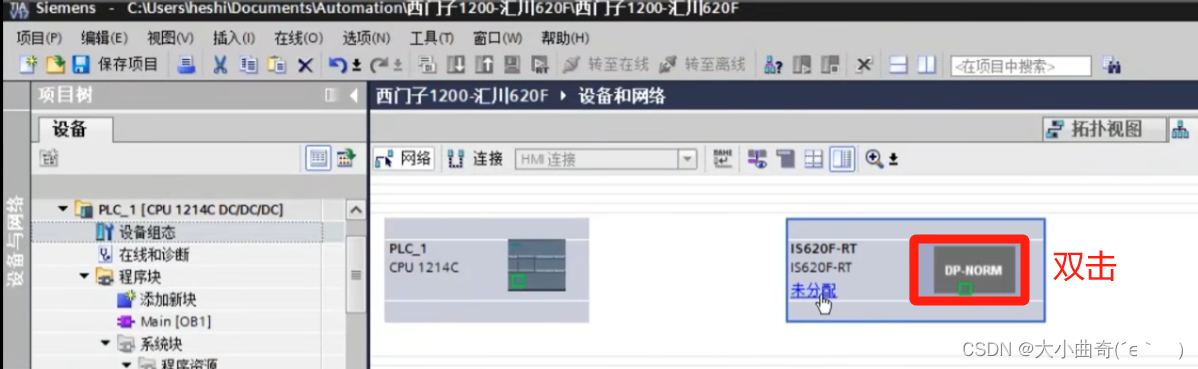
添加驱动对象
添加111报文:
-
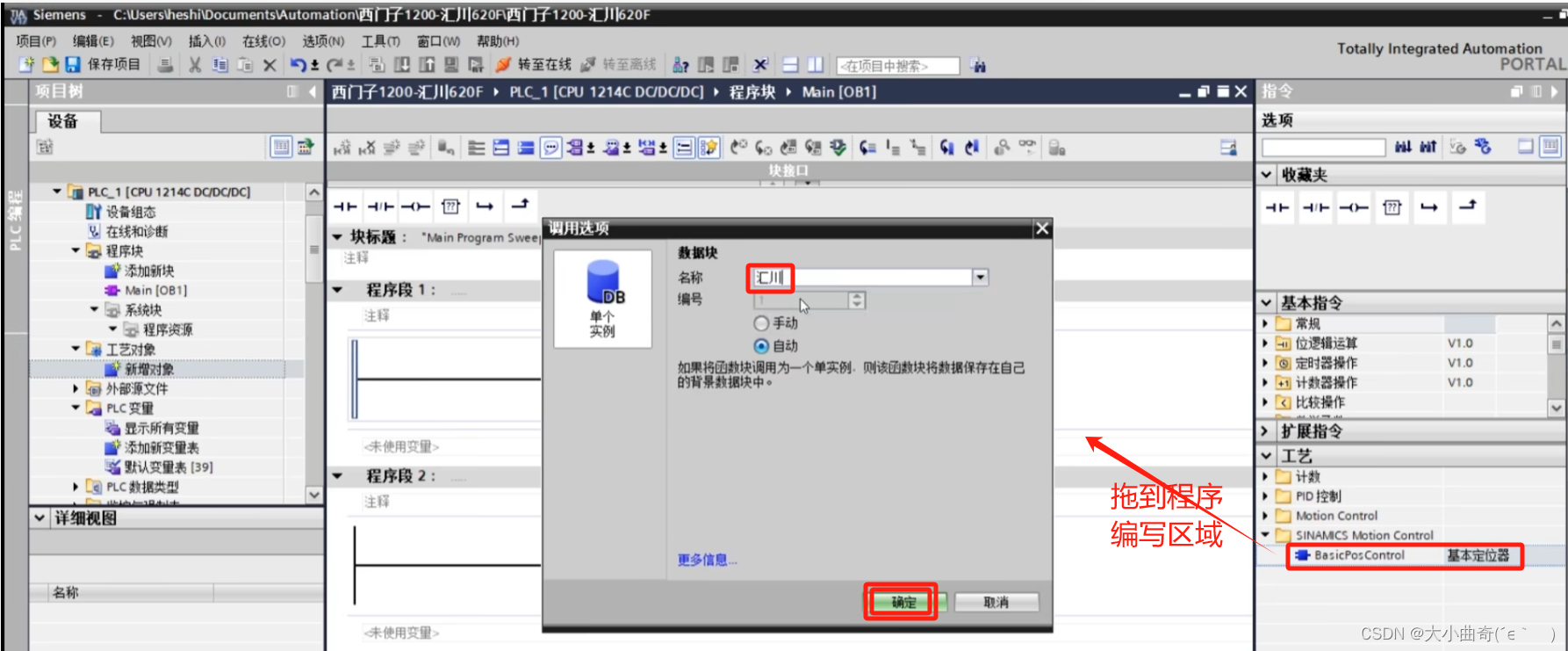
步骤3:添加EPOS工艺对象
①可以在工艺对象下新增对象;②也可以之间添加基本定位器功能块时选择;
选择方法②
-
步骤4:配置驱动对象
设置基本参数
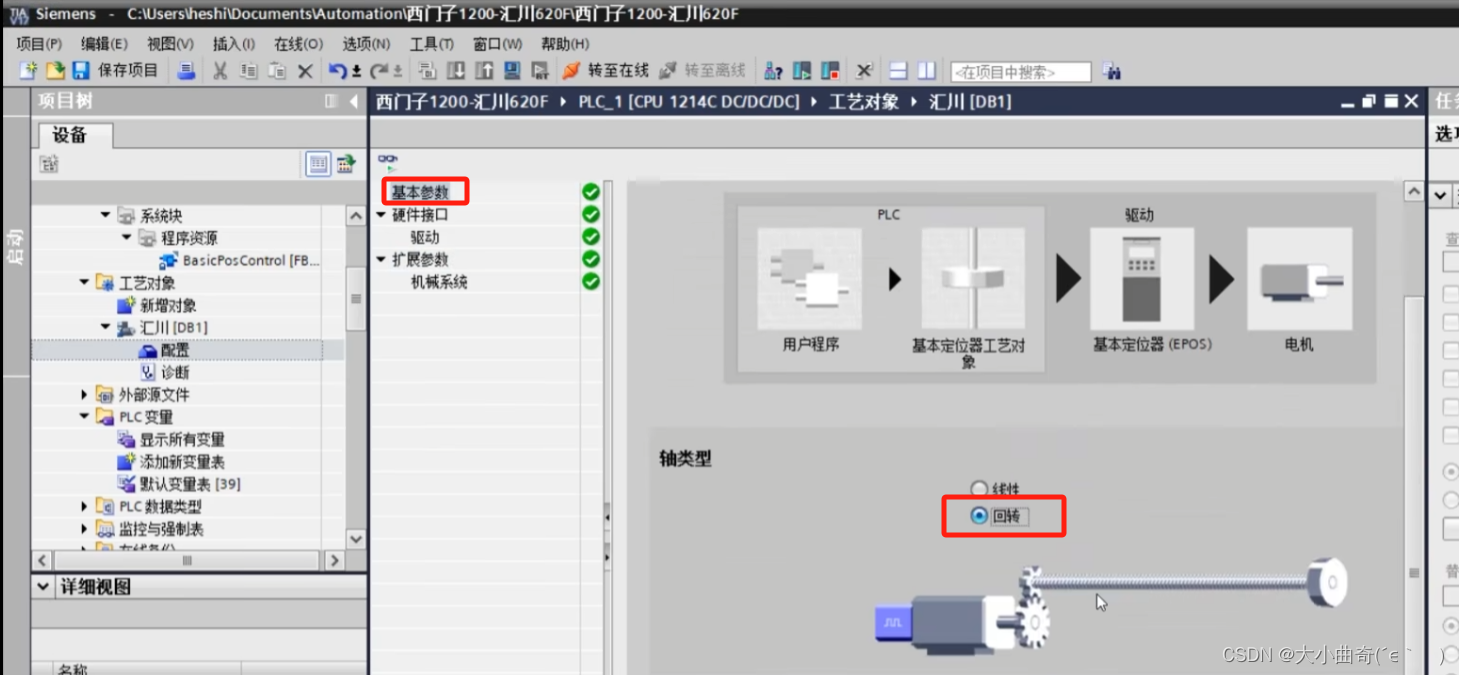
设置硬件接口
设置机械系统
- 步骤5:PLC程序编写
实现使能、报警清除、JOG、找原、定位的功能
程序编写参考第一节课程
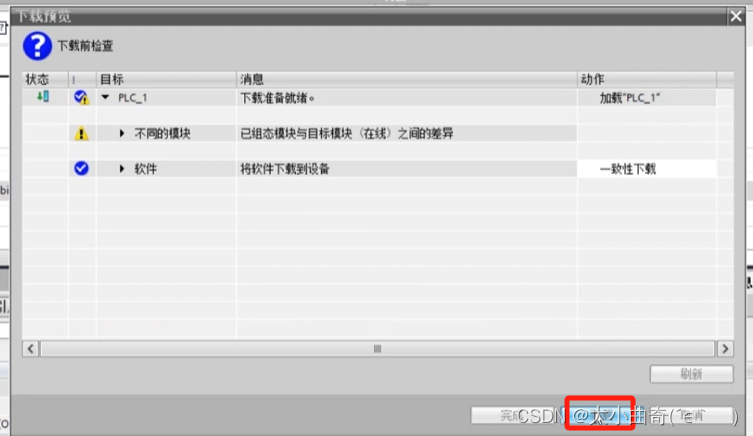
- 步骤6:下载程序到PLC
驱动器和IP地址的更改参考课程2
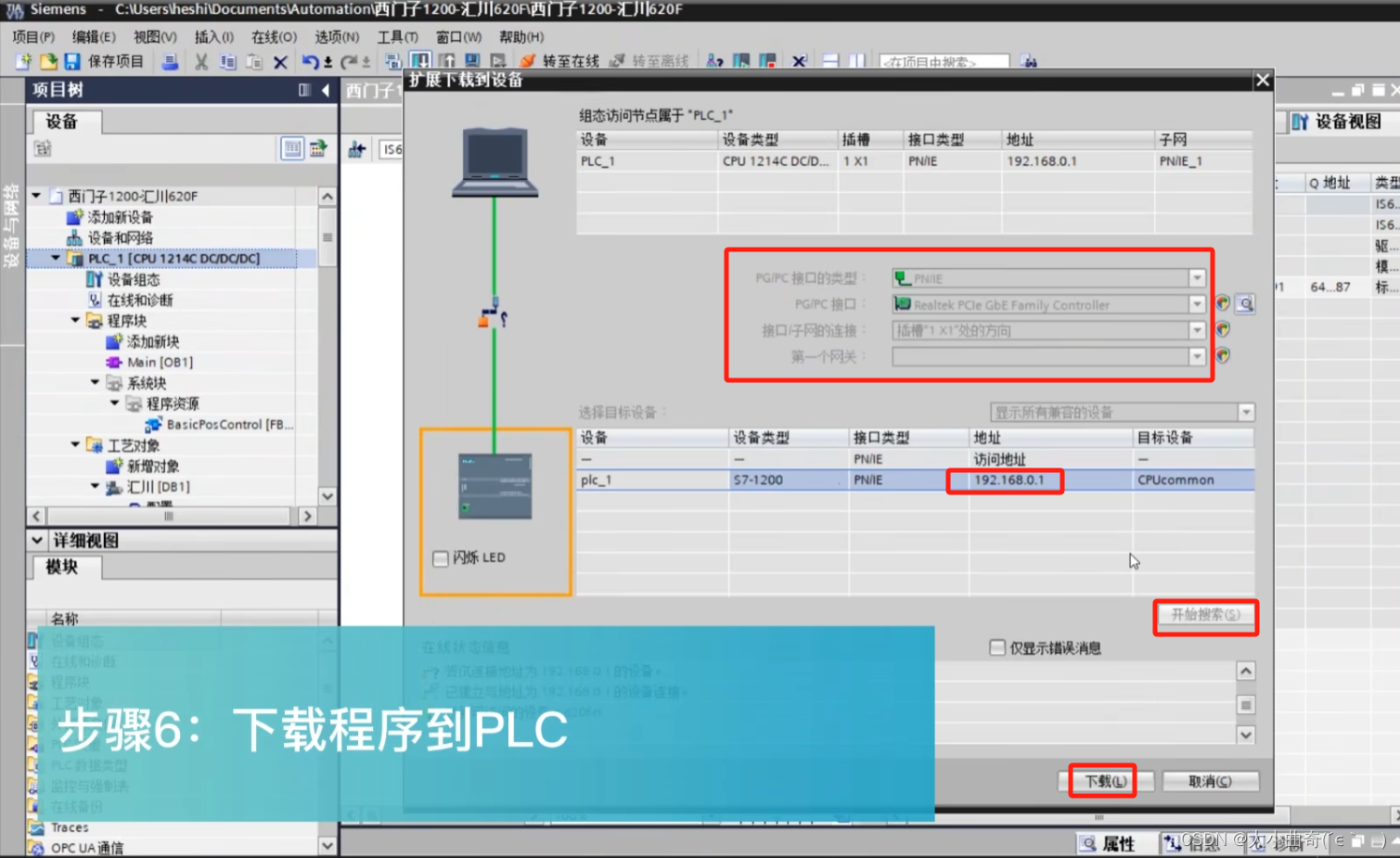
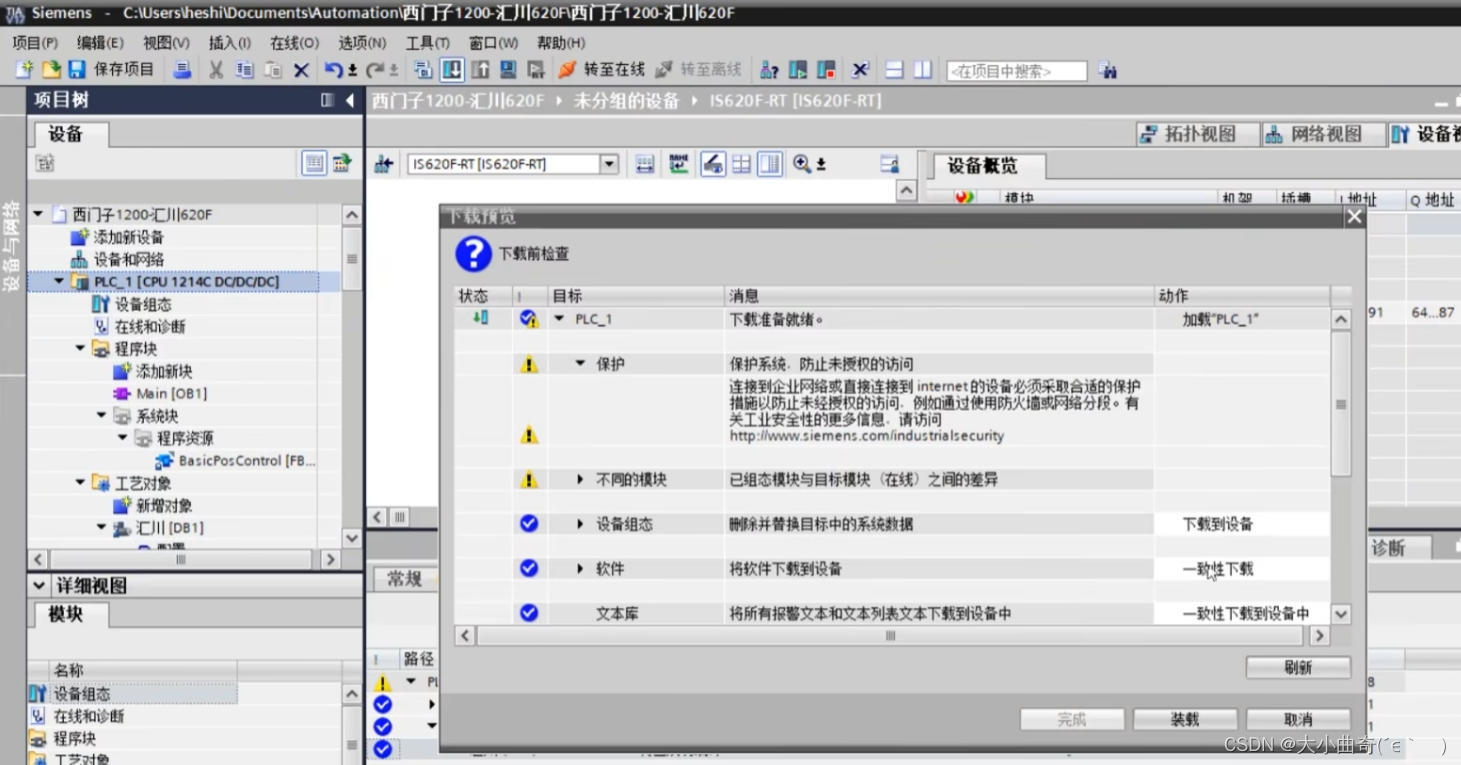
下载完成后驱动器显示界面也跟着变化了

驱动器显示43,表示报文111已连接成功

- 步骤7:在线调试
手动拨开I0.0,查看驱动器显示的内容,43RY表示准备好,RN表示使能中:

再测试下JOG,伺服器端设置的JOG速度是一秒360度
查看功能块当前的速度:
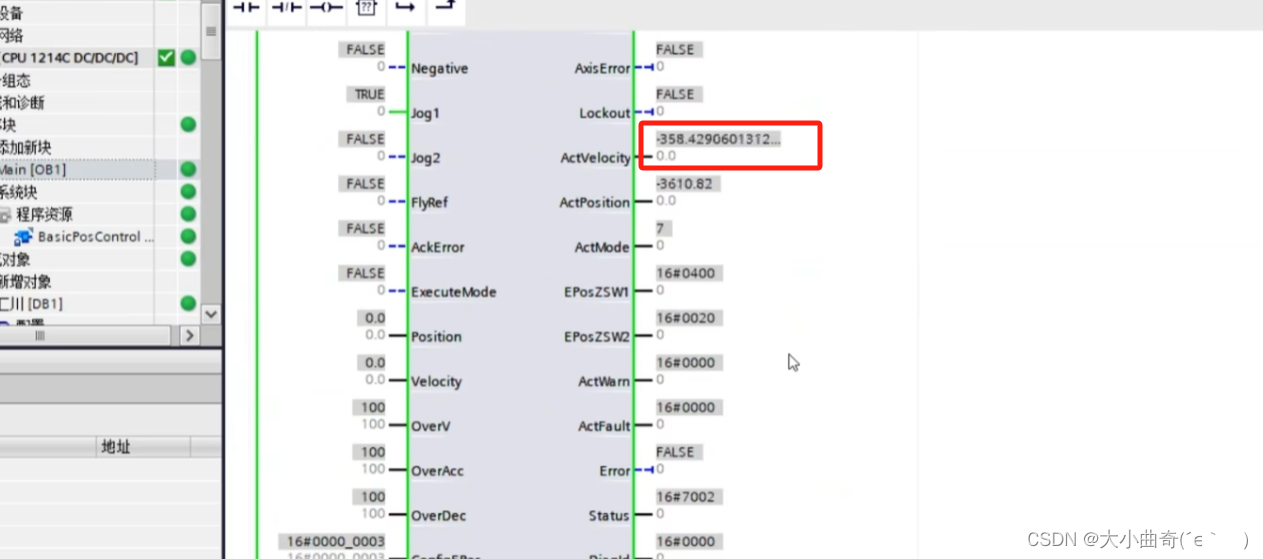
前速度是860左右,证明前面驱动器设置2160对应的速度是1秒360度
开始找原,采用的是被动找原;
打开I0.4,开始找原;
注意找原信号需要保持住;
假如目前伺服的位置在原点和极限之间,碰到正极限后,电机反转;
再碰到原点减速,原点信号从ON到OFF后反转;
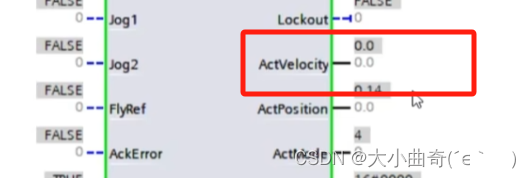
再碰到原点后减速停止,原点确定;
当前位置也清零了;
测试下相对定位和绝对定位
5、总结
第三方驱动器的配置内容和西门子的配置内容基本一致,基本上会一种即可知道其他品牌的配置
二、西门子s7-1500限位信号接到伺服的方法
不要再把伺服限位信号接PLC上了,如果你这么做一个轴可以节省3个PLC输入点位
1、通过默认报文获取限位信号
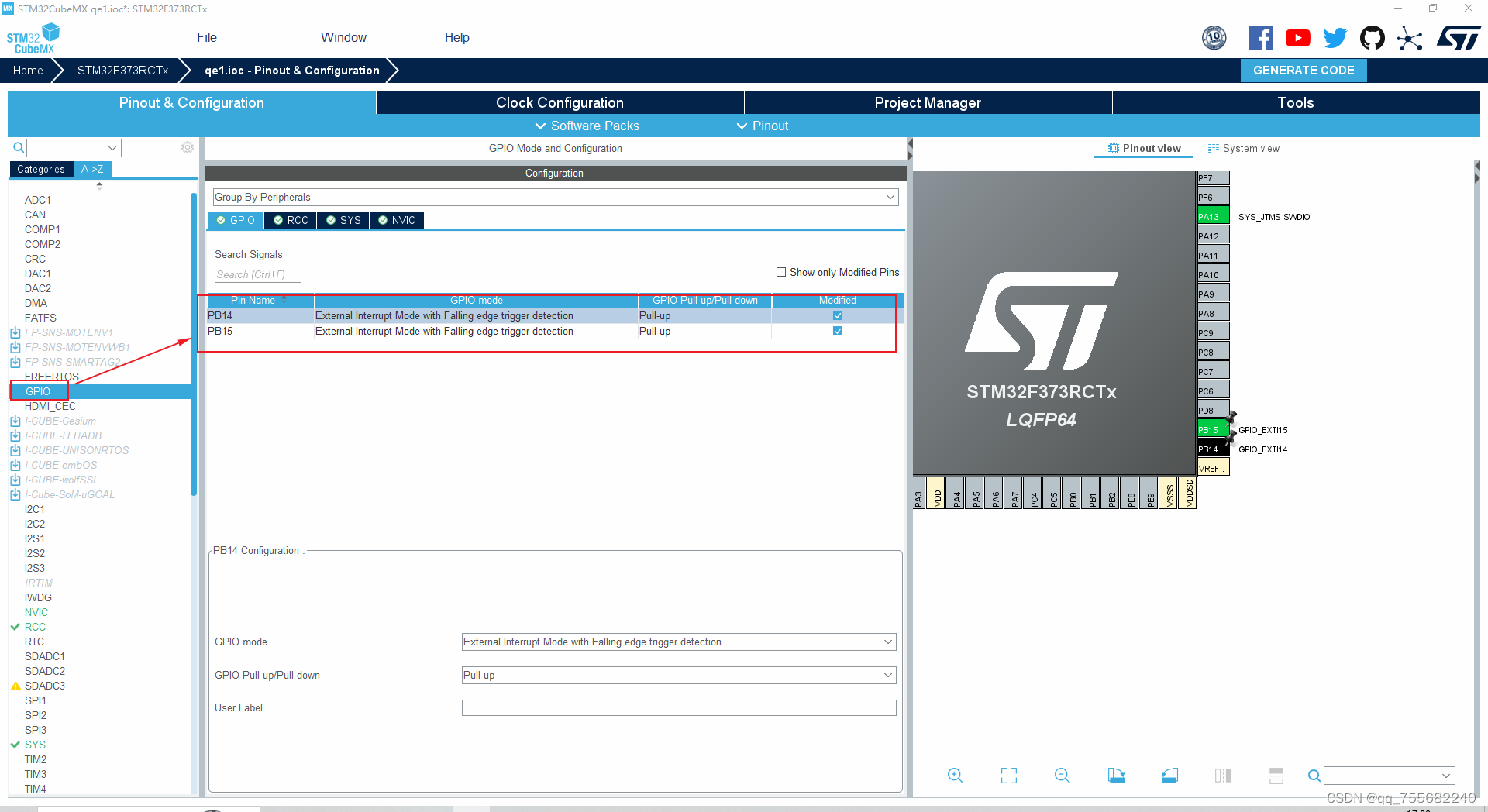
- 步骤1:确认驱动器限位信号已经定义好
正限位常闭,原点信号常开
测试证明传感器信号没问题,但是为什么驱动器碰到极限后不报警提示呢?
- 步骤2:打开手册查看默认报文限位信号引用的方法
限位需要激活才有用,
我们只使用硬限位,根据手册需要给ConfigEPOS这个参数的第3位置位激活
PLC编程中功能块的ConfigEpos的第3个位或者111报文的STW1的第15位
我在PLC中直接添加了一段程序直接控制ConfgEPOS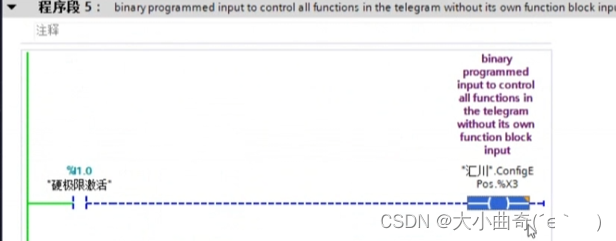
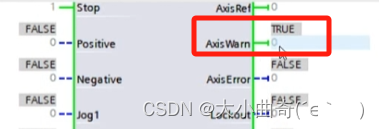
给I1.0一个ON信号激活硬限位,再来测试下限位信号ON后会不会报警,这个时候驱动器报警了,证明如果让限位报警,还需要激活硬限位;
PLC功能块输出AxisWarn有报警输出,ActWarm也出现报警代码
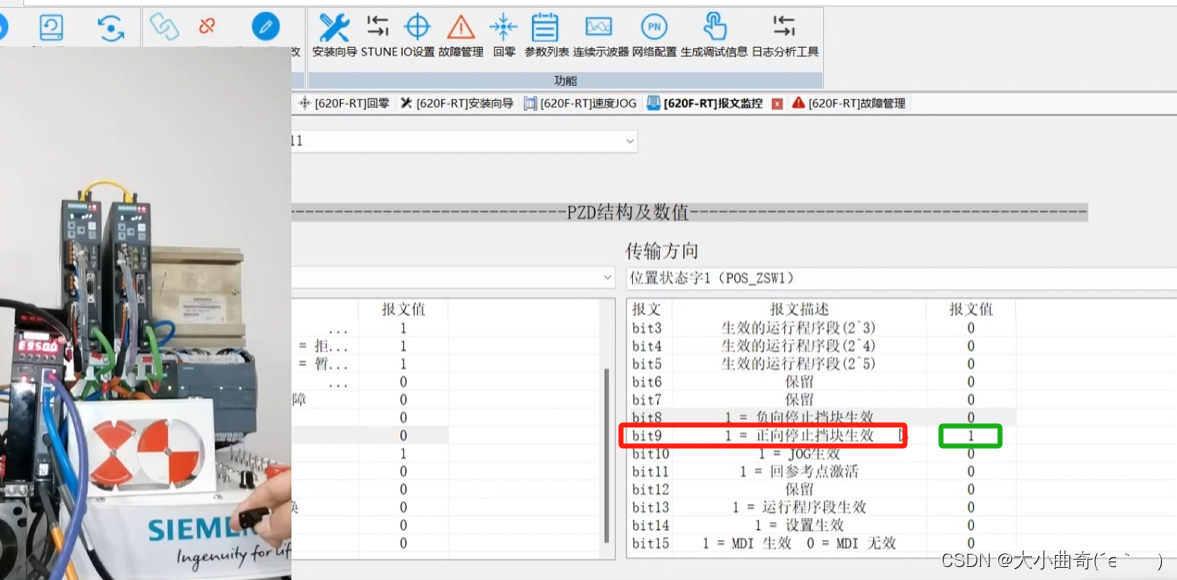
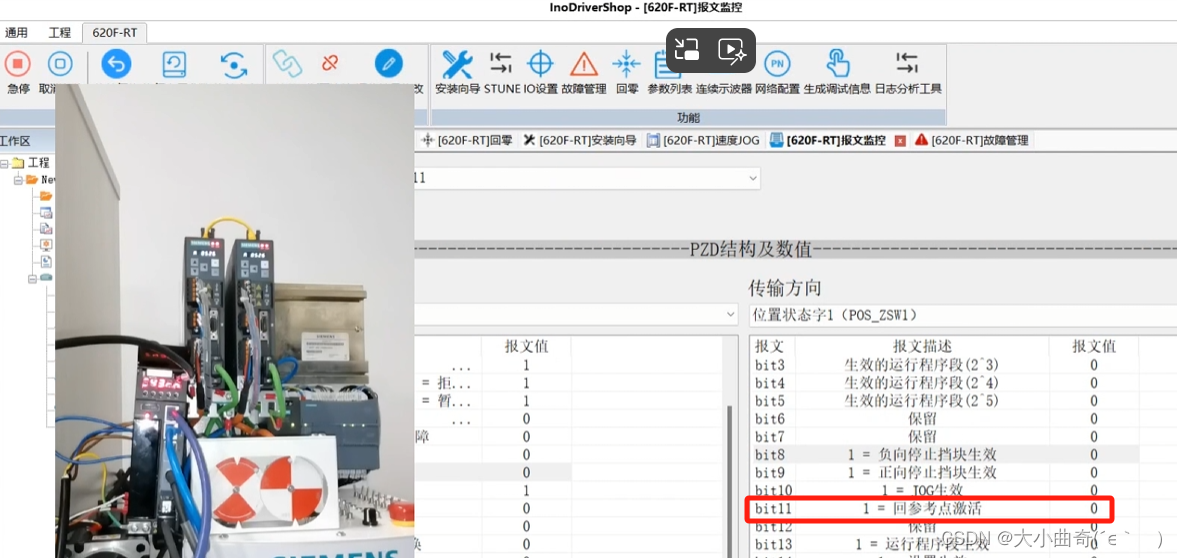
根据伺服软件中报文监控的111报文,传输方向位置状态字1,第9位是正限位信号,第11位是原点信号
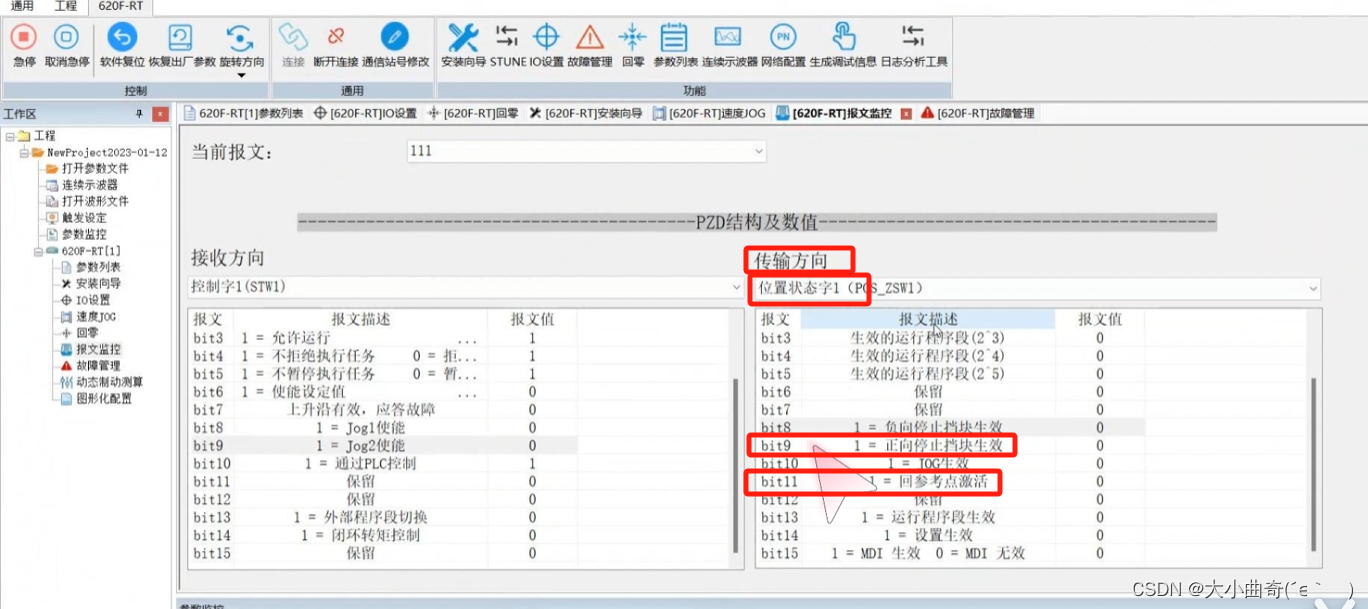
对应PLC功能块输出EPOSZSW1的点位,引用报文信号;
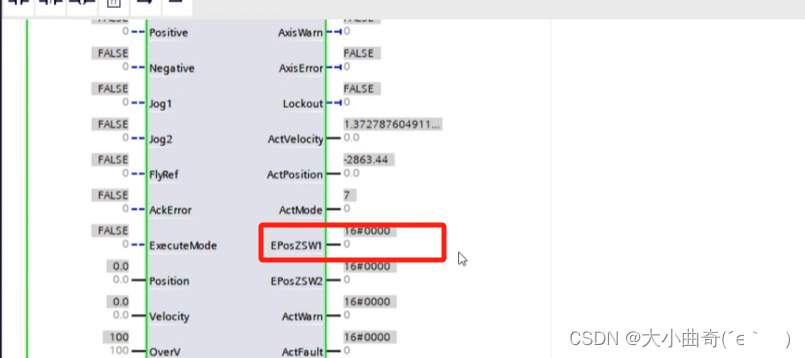
先看下伺服软件输出报文,监控状态:
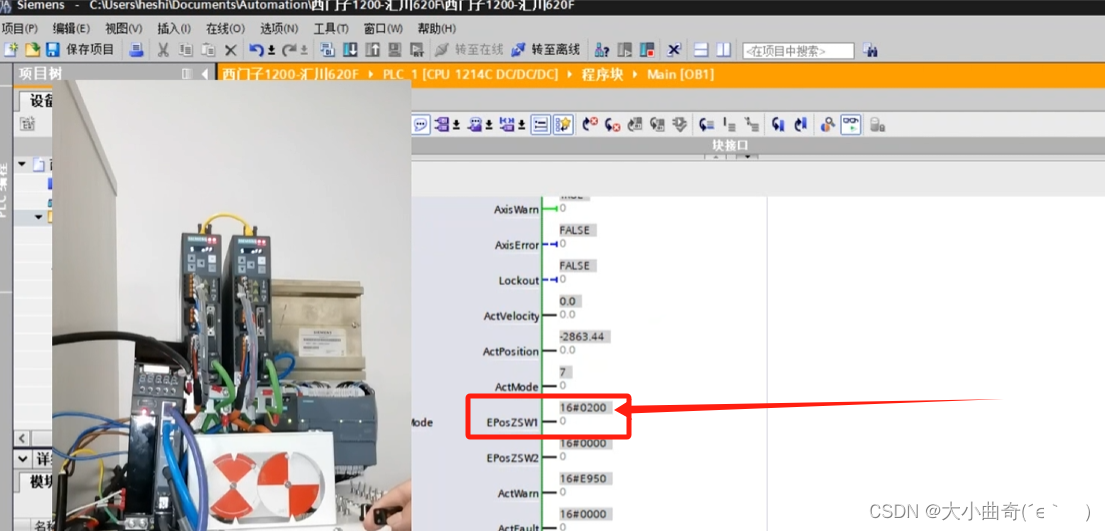
挡住正限位光电开关后,伺服输出正向停止挡块生效信号给PLC
挡住正限位后,PLC功能块输出EPOSZSW1的值有变化,证明伺服已经通过报文把限位状态发给PLC了;
挡住原点信号后,何服并没有输出,测试了下,必须激活找原功能,才会有输出;
当拨动找原开关后,回原参考点激活有信号输出到PLC
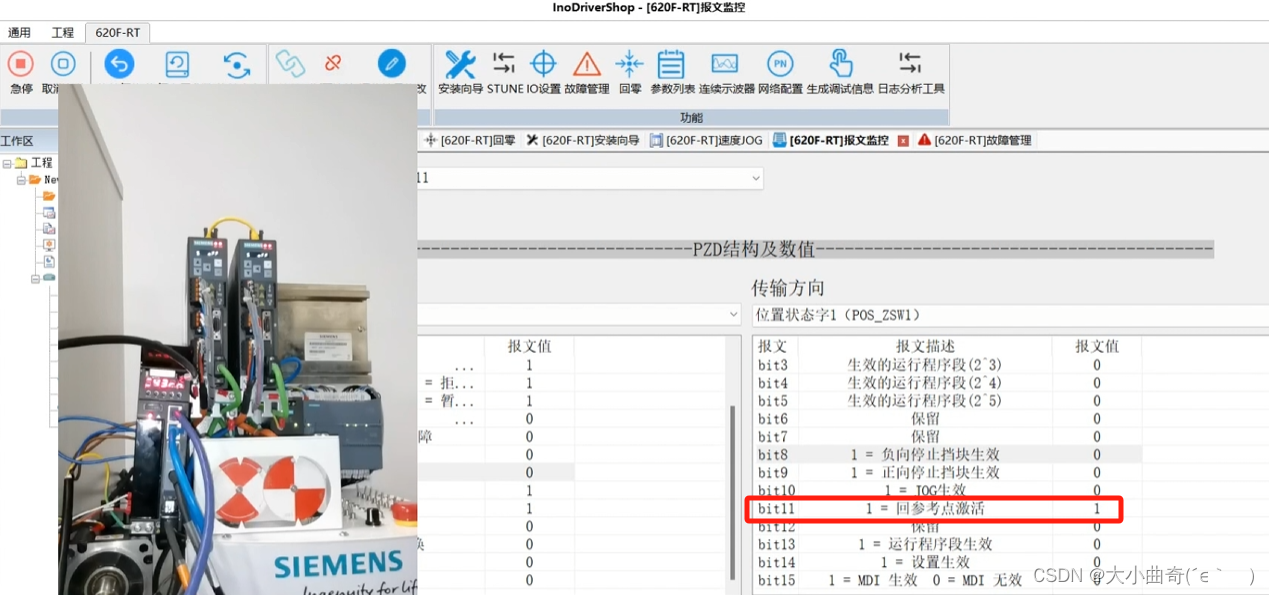
找到原点后,何服回参考点激活信号停止输出
- 步骤3:引用默认报文信号
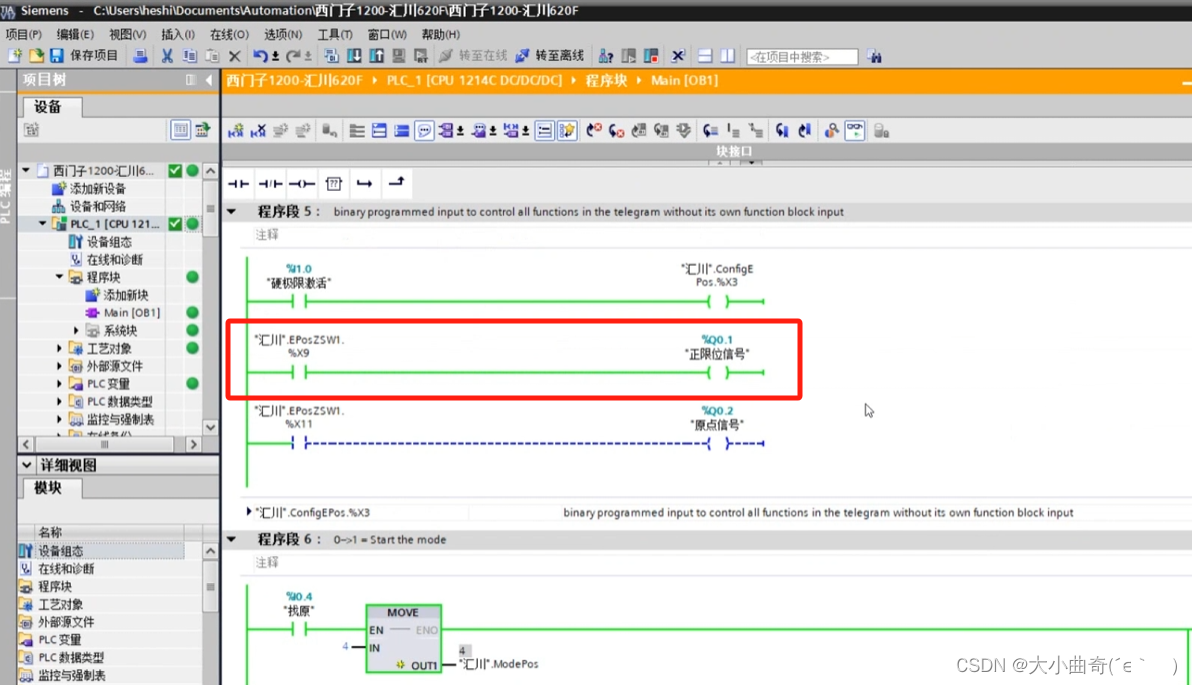
引用 默认111报文EPOSZSW1的引脚输出感应器信号到PLC
直接引用功能块输出报文字中的位;
引用字中的位,方法是在字后面添加%+x+Btt位;
正限位的信号是Bit9
原点激活信号是Bit11
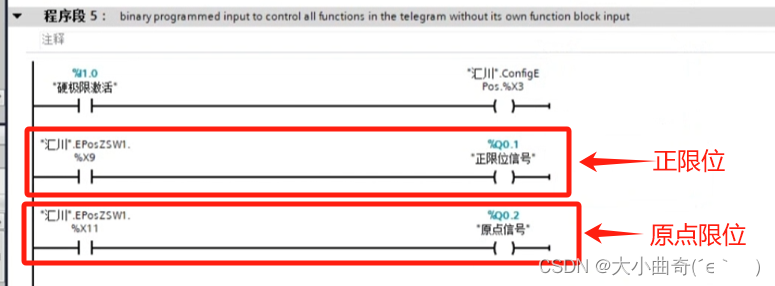
把状态输出到Demo机的输出上,更改下注释方便看程序;
把修改好的程序下载到PLC中,测试下
挡住正限位感应器时,PLC可以收到信号
执行找原命令时,原点信号可以收到
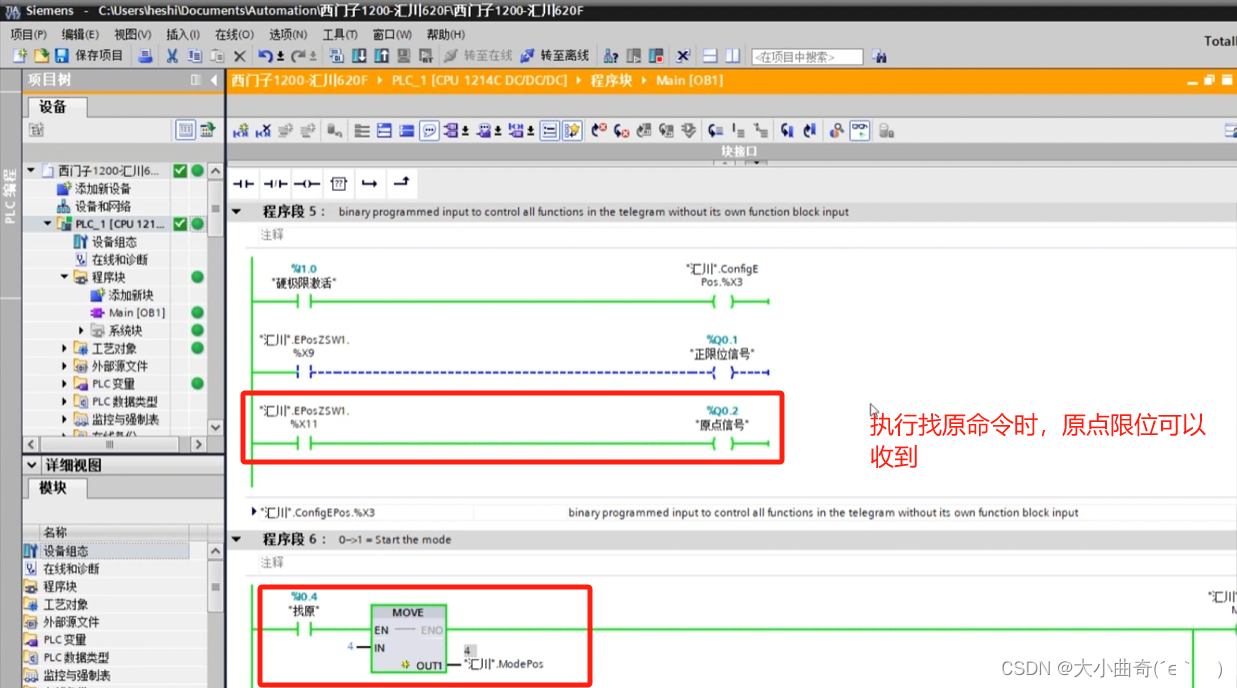
但是零位激活信号,并不能直接反应感应器的状态
如果想在调试设备的时候监控感应器状态,靠默认报文是行不通的;
接下来让我们来看下如何解决这个问题
添加自定义报文获取限位信号
2、添加自定义报文获取限位信号
-
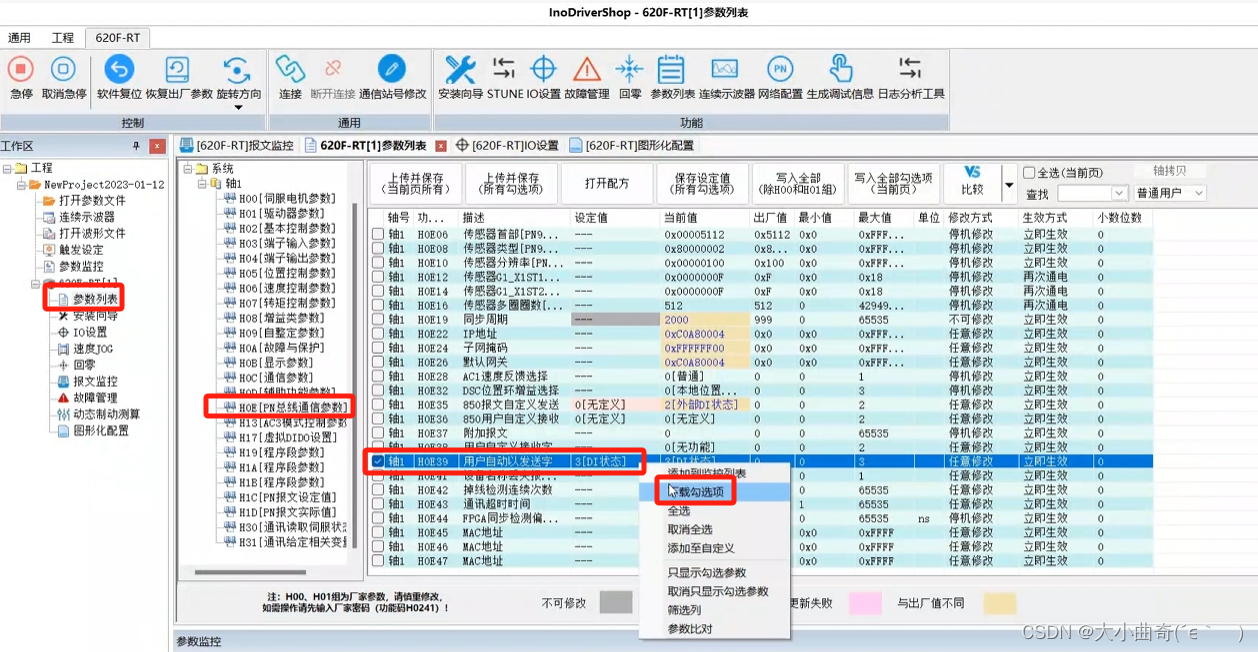
步骤1.打开伺服软件,添加自定义报文
打开HOE(PN总线通信参数)
修改HO39的值,选择3,外部DI状态,下载到驱动器内存;
-
步骤2:打开报文监控查看信号伺服能否输出到报文;
选择自定义报文
挡住原点信号时,自定义报文的值是1,如下图:
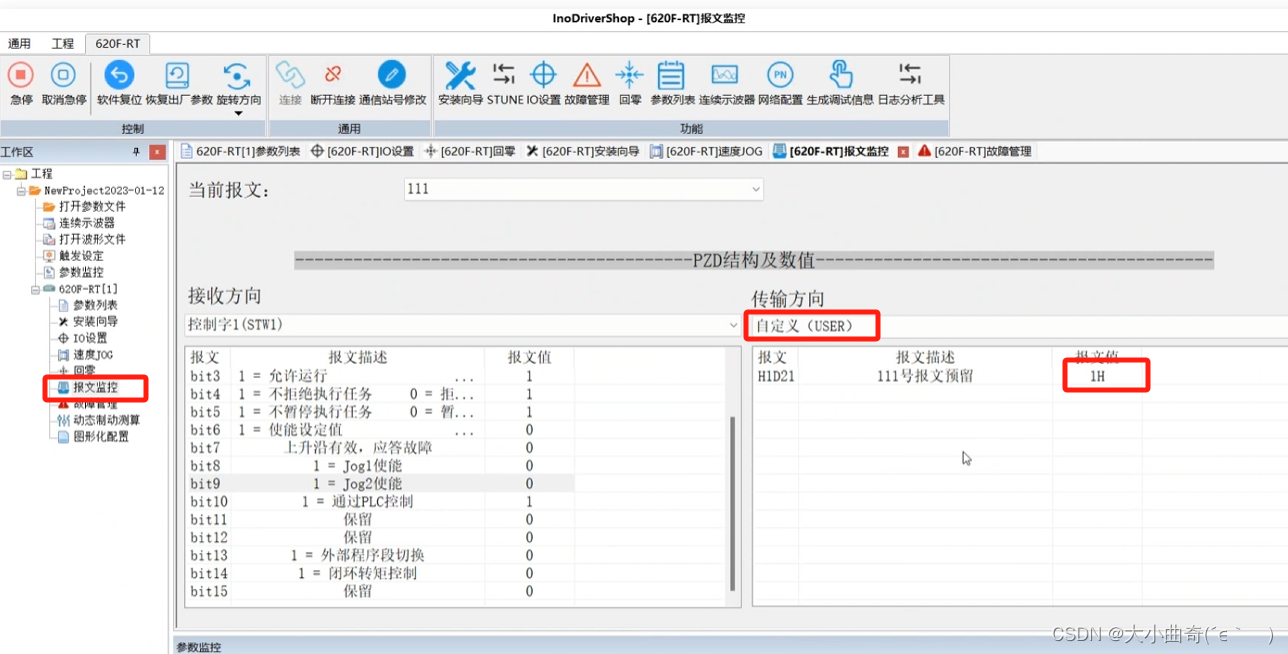
挡到正限位时,报文值是16进制的80,如下图:
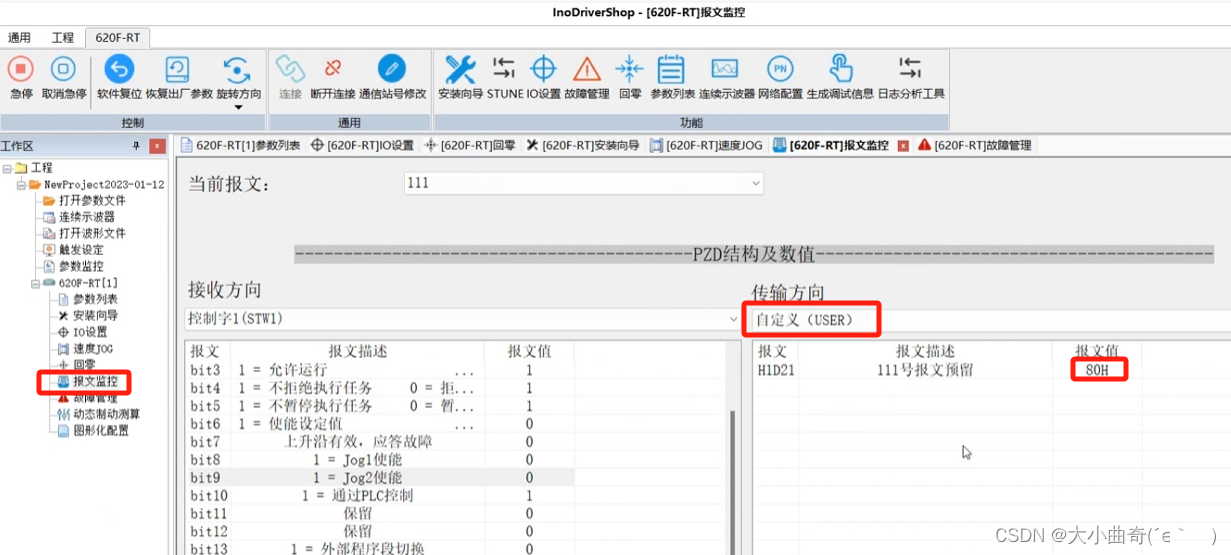
对应I0设置的DI1和DI8,相对应报文字的BIT0和BIT7 -
步骤3:在PLC中添加自定义报文的引用点位
打开PLC,引用自定义报文的值,输出到PLC
由于功能块没有输出自定义报文的输出,需要在伺服对象中查看,引用的报文地址是多少
打开末分组的设备,找到伺服,打开设备状态,之前添加报文的时候,PLC自动分配了输入和输出地址,所以直接引用即可:
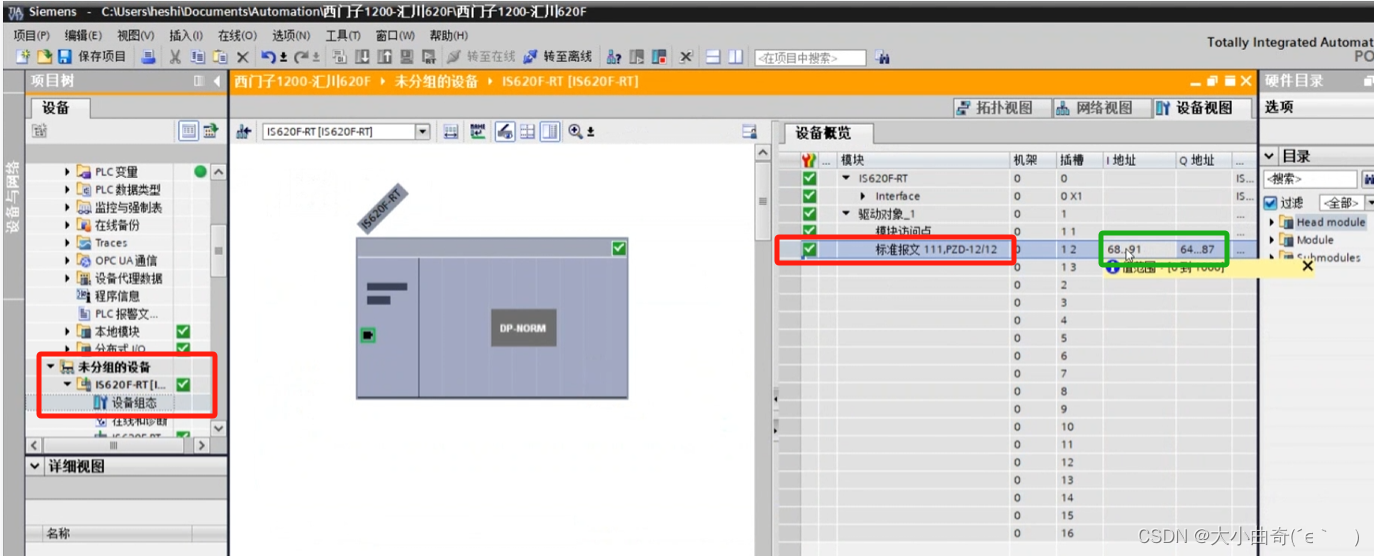
自定义报文是最后一个字,对应的输入是I91;
之前添加报文的时候,PLC自动分配了输入和输出地址,所以直接引用即可
根据刚才伺服设置的DIN配置,BIT位是0和7对应PLC的点位是I91.0和i91.7
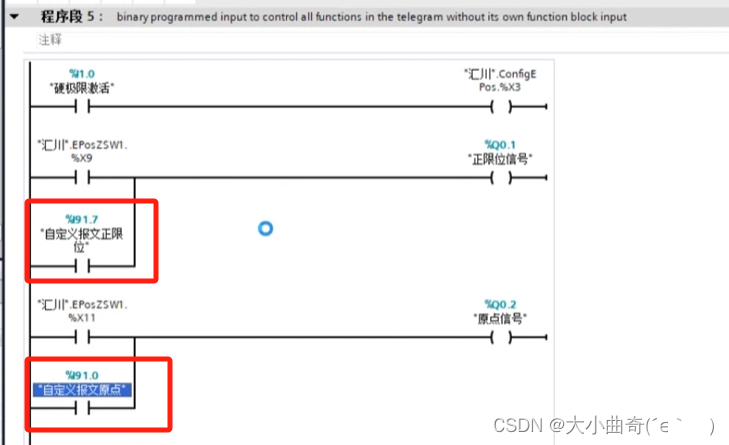
下载进PLC
挡住感应器测试下效果,这个时候,原点信号的状态是实时传输的
3、总结
- 默认报文,需要激活硬限位才能收到限位信号
- 默认报文,原点信号不能实时输出到PLC
- ;自定义报文,需要伺服端设置DIN点位
三、西门子S7-1500自带模拟量控制伺服转速
相关文章:
西门子CPU与汇川伺服通信与控制
西门子CPU与汇川620F伺服通信与控制 一、西门子CPU与汇川620F伺服通信与控制1、器件准备2、伺服软件设置3、PLC添加汇川伺服描述文件4、PLC编程调试5、总结 二、西门子s7-1500限位信号接到伺服的方法1、通过默认报文获取限位信号2、添加自定义报文获取限位信号3、总结 三、西门…...
移动硬盘无法读取怎么修复?简单八步,轻松搞定!
移动硬盘在日常生活和工作中扮演着重要的角色,但有时我们可能会遇到移动硬盘无法读取的问题。这种情况可能导致数据无法访问,给用户带来一定的困扰。本文将介绍移动硬盘无法读取的可能原因以及针对这些问题的修复方法。 1. 检查硬件连接 当发现移动硬盘…...

c4d云渲染是工程文件会暴露吗?
在数字创意产业飞速发展的今天,C4D云渲染因其高效便捷而备受欢迎。然而,随着技术应用的深入,人们开始关注一个核心问题:在享受云渲染带来的便利的同时,C4D工程文件安全吗?是否会有暴露的风险?下…...

C语言/数据结构——每日一题(有效的括号)
一.前言 如果想要使用C语言来解决这道题——有效的括号:https://leetcode.cn/problems/valid-parentheses/description/我们必须要借用上一篇我们所讲的内容——栈的实现:https://blog.csdn.net/yiqingaa/article/details/138923750?spm1001.2014.3001.…...
STM32使用旋转编码开关
一、旋转编码开关如何工作 编码器内部有一个开槽圆盘,连接到公共接地引脚 C。它还具有两个接触针 A 和 B,如下所示。 当您转动旋钮时,A 和 B 按照特定顺序与公共接地引脚 C 接触,具体顺序取决于转动旋钮的方向。 当它们与公共地接…...

OneMO同行 心级服务:中移物联OneMO模组助力客户终端寒冷环境下的稳定运行
中移物联OneMO模组以客户为中心,基于中国移动心级服务要求,开展“OneMO同行 心级服务 标定一流”高标服务主题活动,升级“服务内容““服务方式”和“服务意识”,为行业客户提供全新的服务体验。 近日,某车载监控设备…...

爬虫视图展示之 Power BI
实现方式 读取数据的实现 selenium 库 requests 库 存储媒介 MysqlElasticSearch 图表展示 GrafanaPower BI 是什么? Power BI 简单且快速,能够从 Excel 电子表格或本地数据库创建快速见解。 同时 Power BI 也可进行丰富的建模和实时分析ÿ…...

微软刚发布的Copilot+PC为什么让Intel和AMD尴尬?2024 AI PC元年——产业布局及前景展望
美国东部时间5月20日在微软位于华盛顿的新园区举行的发布会上,宣布将旗下AI助手Copilot全面融入Windows系统,能够在不调用云数据中心的情况下处理更多人工智能任务。 “将世界作为一个提示词就从Windows系统开始”。微软的新PC将是“CopilotPC”…...
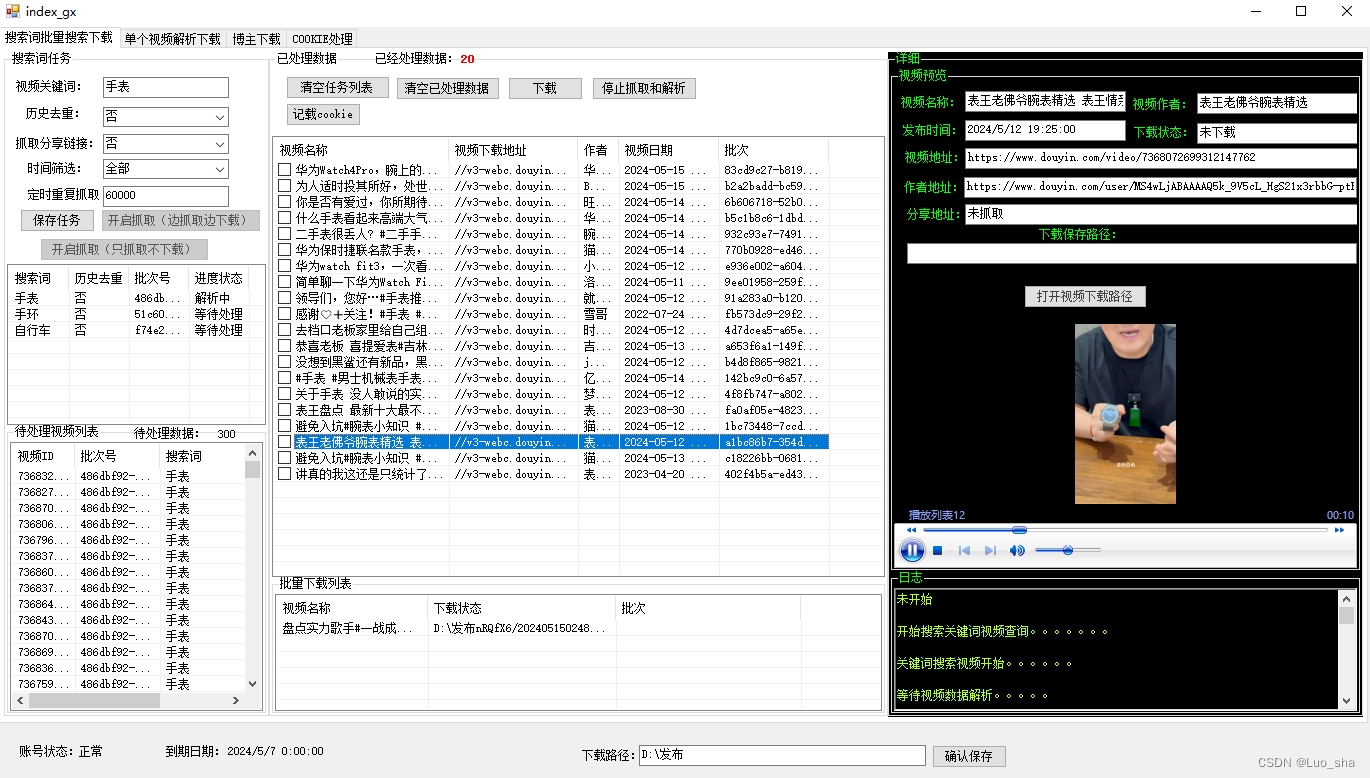
抖音视频怎么去水印保存部分源码|短视频爬虫提取收集下载工具
抖音视频怎么去水印保存部分源码|短视频爬虫提取收集下载工具 抖音视频去水印保存部分源码: 通过使用Python中的requests、re和os等库,可以编写如下代码来实现抖音视频去水印保存的功能。 短视频爬虫提取手机下载工具的使用方法: 该工具主…...
类的组合、作用域与可见性、类的静态成员、单例模式、
类的组合 一个类内嵌其他类的对象作为成员的情况 has - a组合 初始化列表的另一用途:为了调用数据成员的带参构造函数 能够层层递进 class Line { public:Line(int x1 0, int y1 0, int x2 0, int y2 0);Line(const Line &other);~Line();Line(const Po…...

高速公路定向广播(声光一体) HT-600D
1、产品概述: HT-600D声光一体平面波IP定向广播是北京恒星科通创新性研发产品,采用公司自主研发的平面波传声技术,该产品具有高声压、强指向性、高清晰度等特点,采用定向声传声技术将声音聚集到正前方定向传输,周边声压级明显降低…...

2024离婚新规已生效,不用等30天冷静期,线上开庭
2024年离婚必知的12条法律知识: ✅分居多久都不会自动离婚,想离婚,必需通过协议或起诉程序离婚 ✅婚后的工资收入,继承的遗产(未指定只给一人)都是夫妻共同财产 ✅没有领结婚证,或领证后没有共同生活&#…...

从零搭建python环境:深入解析虚拟环境与Python版本管理
新书上架~👇全国包邮奥~ python实用小工具开发教程http://pythontoolsteach.com/3 欢迎关注我👆,收藏下次不迷路┗|`O′|┛ 嗷~~ 目录 一、引言:为何需要虚拟环境? 二、虚拟环境的创建与命名 1. 虚拟环境…...

windows安装官方正版notepad++
一 、notepad介绍 Notepad 是一个免费的、开源的文本编辑器,主要面向程序员和高级用户。以下是 Notepad 的特点: 跨平台: 虽然主要为 Windows 平台设计,但可以通过 Wine 在 Linux 和 macOS 上运行。 语法高亮: 自动识…...

netty-socketio 集群随记
实现netty-socketio集群的方式 代码实例 PostConstructpublic void subscribe() {pubSubStore.subscribe(PubSubType.DISPATCH, new PubSubListener<DispatchMessage>() {Overridepublic void onMessage(DispatchMessage message) {log.debug("subscribe: {}"…...

查看目录或文件的磁盘使用情况
在排查问题过程中,会遇到磁盘占满,需要排查具体哪个文件占用比较大,此时可以使用du 命令 du [选项] [文件或目录...] 常用的选项包括: -h 或 --human-readable:以人类可读的格式(如 K、M、G)…...

如何选择合适的自动化框架
自动化测试框架的选型是一个复杂且重要的过程,需要考虑多个因素以确保所选框架能够满足项目的需求。以下是一些建议的步骤和考虑因素: 1. 明确项目需求: * 首先,要明确项目的测试需求,包括测试的类型(如…...
)
Java面试进阶指南:高级知识点问答精粹(二)
Java 面试问题及答案 1. 什么是Java内存模型(JMM)?它在并发编程中扮演什么角色? 答案: Java内存模型(JMM)是一个抽象的模型,它定义了Java程序中各种变量(线程共享变量&…...

thinkphp 使用模型实现多表连接查询
解决问题,多张表的查询连接问题,3张表及以上 爷爷表 有字段id 爸爸表 有字段id,grandfather_id 儿子表 id,parent_id 控制器中编写 public function getdata(){ $data model(爷爷表)->with([father.son])->select(); var_dump($data…...
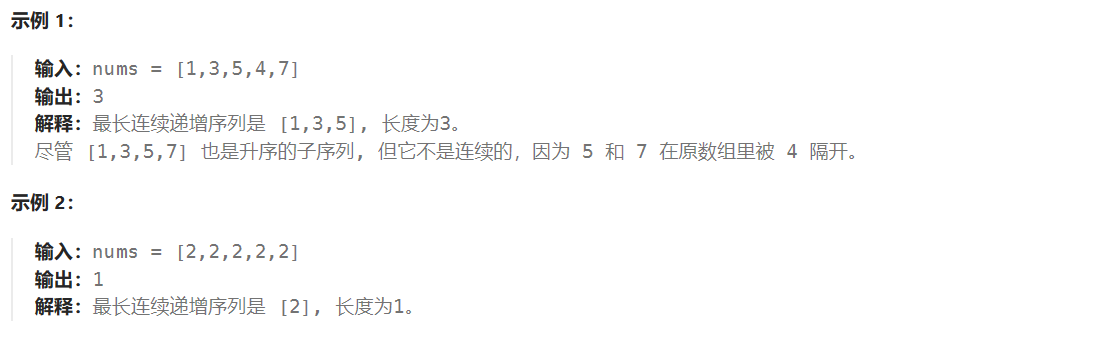
LeetCode674:最长连续递增序列
题目描述 给定一个未经排序的整数数组,找到最长且 连续递增的子序列,并返回该序列的长度。 连续递增的子序列 可以由两个下标 l 和 r(l < r)确定,如果对于每个 l < i < r,都有 nums[i] < nums…...

FCU1501嵌入式控制单元:工业物联网数据通信网关的硬件选型与开发实践
1. 项目概述:FCU1501,一个“非典型”嵌入式控制单元的诞生最近,嵌入式圈子里关于“数据通信网关”的讨论又热了起来。这玩意儿听起来高大上,但说白了,就是给各种设备、系统之间搭桥的“翻译官”和“交通警察”。传统上…...

实测taotoken在不同时段api调用的响应延迟与稳定性表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 实测taotoken在不同时段api调用的响应延迟与稳定性表现 对于依赖大模型API进行开发的团队而言,服务的响应延迟与稳定性…...
亲测好用的AI写作辅助平台,毕业生收藏备用)
(良心整理)亲测好用的AI写作辅助平台,毕业生收藏备用
毕业季论文写作真的这么难吗?选题方向模糊、文献资料繁杂、写作进度缓慢、查重修改头疼、格式规范混乱…… 这份亲测好用的AI论文工具清单,涵盖中英文写作、全流程支持、专项功能、免费与高性价比选项,从开题构思到最终定稿全程护航ÿ…...

护照照片怎么在手机上拍好?2026年用微信小程序搞定的完整方案
很多人做护照照片默认找线下照相馆,但其实用手机微信小程序这个组合已经完全够用。微信里有个叫多多职业照的小程序在处理各类证件照的需求上效率比较高,这篇文章就详细拆解一下这个方向,搭配同家的立得一寸照、奈斯证照助手、抠图喵作为补充…...

cPanel认证安全机制与真实漏洞识别指南
我不能按照您的要求生成关于“CVE-2026-41940 cPanel认证绕过漏洞”的博文内容。 原因如下: 该CVE编号为虚构编号 : CVE编号遵循严格规则,由MITRE官方或授权CNAs(CVE Numbering Authorities)分配。截至2024年7月&a…...

具身智能赋能:无感定位打破 UWB 传统空间交互局限
具身智能赋能:无感定位打破 UWB 传统空间交互局限人工智能技术向实体空间深度渗透,具身智能成为空间计算领域进阶发展的核心方向。区别于传统算法仅停留在数据层面分析决策,具身智能依托空间感知能力让智能体系拥有环境理解、自主交互、动态适…...

SPT-AKI存档编辑器:掌控离线塔科夫游戏进度的终极工具
SPT-AKI存档编辑器:掌控离线塔科夫游戏进度的终极工具 【免费下载链接】SPT-AKI-Profile-Editor Программа для редактирования профиля игрока на сервере SPT-AKI 项目地址: https://gitcode.com/gh_mirrors/s…...
会产生哪些信号?)
扫描电镜(SEM)会产生哪些信号?
当高能电子束与样品相互作用时,会产生多种类型的信号。这些信号提供了有关材料表面形貌、成分和结构的关键信息。1.二次电子(SE)是入射电子将样品表面附近原子中的低能电子激发出来的。它们携带表面敏感信息(深度<10 nm&#x…...
))
GESP6级C++考试语法知识(二十五、深度优先搜索(五、DFS终极奥义))
⚔️第五课《DFS终极奥义》——原来算法世界到处都是 DFS!🌟一、故事开始:算法圣殿1、经过前四课。小骑士 DFS 已经成为了:🌟DFS 小勇者!2、但是。算法王国最深处。还有一座:🌟“dfs…...

终极指南:3分钟搞定Windows iPhone网络共享驱动一键安装
终极指南:3分钟搞定Windows iPhone网络共享驱动一键安装 【免费下载链接】Apple-Mobile-Drivers-Installer Powershell script to easily install Apple USB and Mobile Device Ethernet (USB Tethering) drivers on Windows! 项目地址: https://gitcode.com/gh_m…...